i
TUGAS AKHIR
SISTEM PEMANTAUAN KEAMANAN RUMAH MENGGUNAKAN
APLIKASI
VIDEO
CALL
PADA JARINGAN GSM 3G
Diajukan Untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh :
YOHANIS MANGGAU
NIM : 075114012
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
FINAL PROJECT
HOME SECURITY MONITORING SYSTEM BY USING VIDEO CALL
APPLICATION ON THE GSM 3G NETWORKING
Presented as Partial Fulfillment of the Requirements
To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
YOHANIS MANGGAU
NIM : 075114012
ELECTRICAL ENGINEERING STUDY PROGRAM
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2011
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
iv
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
v
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP
MOTTO :
1.
JANGAN PERNAH MENYERAH DALAM MENGHADAPI
HIDUP, KARENA TUHAN SELALU MEMBANTU MELALUI
ORANG DI SEKITARMU.
2.
HIDUP HANYA SEKALI, JALANI DENGAN OPTIMIS
.
Kupersembahkan skripsi ini kepada :
Tuhan Yesus Kristus dan Bunda Maria,
Bapakku tersayang,
Ibuku tersayang,
Kakakku dan adikku,
Lystiani Karatika Sari,
vi
PERNYATAAN KEASLIAN KARYA
“Saya menyatakan dengan sesungguhnya bahwa tugas akhir yang saya tulis ini tidak memuat
karya atau bagian karya orang lain, kecuali yang telah disebutkan dalam kutipan dan daftar
pustaka, sebagaimana layaknya karya ilmiah.”
Yogyakarta, 13 September 2011
Yohanis Manggau
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
vii
LEMBAR PERNYATAAN PERSETUJUAN
PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS
Yang bertanda tangan di bawah ini, saya mahasiswa Universitas Sanata Dharma :
Nama
:
Yohanis
Manggau
Nomor Mahasiswa
: 075114012
Demi pengembangan ilmu pengetahuan, saya memberikan kepada Perpustakaan Universitas
Sanata Dharma karya ilmiah saya yang berjudul :
SISTEM PEMANTAUAN KEAMANAN RUMAH MENGGUNAKAN
APLIKASI VIDEO CALL PADA JARINGAN GSM 3G
beserta perangkat yang diperlukan (bila ada). Dengan demikian saya memberikan kepada
Perpustakaan Universitas Sanata Dharma hak untuk menyimpan, mengalihkan dalam bentuk
media lain, mengelolanya dalam bentuk pangkalan data, mendistribusikan secara terbatas, dan
mempublikasikannya di Internet atau media lain untuk kepentingan akademis tanpa perlu
meminta ijin dari saya maupun memberikan royalti kepada saya selama tetap mencantumkan
nama saya sebagai penulis.
Demikian pernyataan ini yang saya buat dengan sebenarnya.
Yogyakarta, 13 September 2011
viii
INTISARI
Sistem komunikasi bergerak diyakini akan memegang peranan yang semakin penting
dalam memenuhi kebutuhan telekomunikasi. Sistem komunikasi bergerak generasi ketiga
(3G), seperti
Universal Mobile Telecommunication System
menyediakan berbagai macam
fasilitas dan layanan bagi para pelanggannya
.
Aplikasi dan layanan tersebut antara lain adalah
aplikasi multimedia, akses internet, transfer data kecepatan tinggi, serta aplikasi interaktif
yang bersifat
real time
,
seperti
video call
dan
mobile
tv. Dengan sistem pemantauan
kemananan rumah yang menggunakan aplikasi
video call
pada jaringan 3G ini, pengamanan
terhadap rumah diharapkan dapat ditingkatkan. Pemilik rumah dapat mengecek situasi rumah
secara
real
setiap saat melalui ponsel.
Sistem ini bekerja hanya satu arah saja yaitu dari sisi ponsel
user
yang bertindak
sebagai pengendali dari jarak jauh. Sistem ini akan bekerja apabila ponsel
user
melakukan
pemanggilan
video call
ke ponsel sistem. Ponsel sistem akan menerima panggilan tersebut
secara otomatis karena berada pada mode
auto answer
yaitu penerimaan panggilan secara
otomatis. Pada saat terjadi komunikasi antara ponsel
user
dengan ponsel sistem, DTMF juga
dapat dikirimkan. Data yang dikirim berupa frekuensi dari nada-nada
tone
keypad
yang
diterima oleh DTMF
decoder
untuk diterjemahkan ke dalam data biner. Kemudian data yang
telah diterjemahkan tersebut dikirim ke mikrokontroler. Mikrokontroler akan mengolah
interupsi tersebut untuk menggerakkan beban/motor servo sesuai dengan data yang
dikirimkan.
Hasil sistem pemantauan keamanan rumah menggunakan aplikasi
video call
pada
jaringan GSM 3G sudah berhasil dibuat, namun sistem membutuhkan sebuah perangkat
tambahan berupa
encoder
DTMF.
Encoder
DTMF berupa
software
yang menyerupai
tone
ponsel yang dikirimkan oleh komputer melalui
speaker
ke ponsel
user
untuk mengendalikan
motor saat
video call
berlangsung.
Kata kunci :
video call
, DTMF, 3G, motor servo.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
ix
ABSTRACT
Mobile communication system is believed will be hold the important role in the fulfill
needs communication. Third-generation of Mobile Communication System (3G), such as
Universal Mobile Telecommunication System provides a variety of facilities and services for
its customers. Applications and services include multimedia applications, internet access, high
speed data transfers, as well as interactive applications that are real time, such as video calls
and mobile TV. With a home security monitoring system that uses video call applications on
3G networks, the safeguarding of the home is expected to be improved. Homeowners can
check on the situation in real house at all times through mobile phones.
This system works only one direction, it can be from the user’s mobile phone which is
the mobile phone acts as the controller of the remote. This system will work if the user’s
phone makes call use video call to the phone system. This phone system will accept the call by
automatically because its position in the auto answer mode as the automatically recipient call.
When the communication is happen between the mobile phone users with the mobile system,
the DTMF can be also sent similar. The data sent in the form of the frequency of the tones
received by tone keypad DTMF decoder to translate into binary data. Then the data that has
been translated is sent to the microcontroller. Microcontroller will process the interruption to
drive the load or servo motor in accordance with the data that is sent.
Home security monitoring system using video call applications on the GSM 3G
network has been created but the system can only work when voice communication.
Therefore, the mobile user needs an additional device as DTMF encoder. DTMF encoder as
software as mobile phones tone that sent by the computer’s speaker to the user phone.
x
KATA PENGANTAR
Puji syukur dan terima kasih kepada Tuhan Yesus Kristus atas segala karunia-Nya
sehingga tugas akhir dengan judul
“
Sistem Pemantuan Keamanan Rumah Menggunakan
Aplikasi
Video Call
Pada Jaringan GSM 3G”
ini dapat diselesaikan dengan baik.
Penelitian yang berupa tugas akhir ini merupakan salah satu syarat bagi mahasiswa
Program Studi Teknik Elektro untuk memperoleh gelar Sarjana Teknik di Universitas Sanata
Dharma Yogyakarta. Selama menulis tugas akhir ini, penulis menyadari bahwa ada begitu
banyak pihak yang telah memberikan bantuan dengan caranya masing-masing, sehingga tugas
akhir ini bisa diselesaikan. Oleh karena itu penulis ingin mengucapkan terima kasih kepada:
1.
Bapak Yosef Agung Cahyanta, S.T., M.T. selaku Dekan Fakultas Sains dan Teknologi
Universitas Sanata Dharma Yogyakarta.
2.
Bapak Damar Widjaja, S.T., M.T., selaku Dosen Pembimbing yang telah banyak
meluangkan waktu untuk memberikan bimbingan, pengetahuan, diskusi, arahan, kritik,
dan saran kepada peneliti sehingga penulisan tugas akhir ini dapat diselesaikan.
3.
Ibu Wiwien Widyastuti, S.T.,M.T., selaku Dosen Pembimbing Akademik yang telah
banyak membantu selama ini.
4.
Bapak dan Ibu Dosen yang telah memberikan semangat, pengetahuan dan bimbingan
kepada peneliti selama kuliah.
5.
Laboran Teknik Elektro yang telah banyak membantu selama ini.
6.
Ibuku dan bapakku, pahlawan dalam hidupku yang tak henti-hentinya memberikan doa
dan selalu menguatkanku.
7.
Kakakku dan Adikku yang selalu memberikan doa dan semangat.
8.
Lystiani Karatika Sari yang telah memberikan arti dan tujuan hidup, semangat dan doa.
9.
Teman-teman Teknik Elektro angkatan 2007 untuk kebersamaan dan dukungannya.
10.
Teman-teman dan Pemilik Kos Banana 21 yang telah memberikan kekeluargaan
selama di Yogyakarta
11.
Semua pihak yang tidak bisa penulis sebutkan satu persatu atas bantuan, bimbingan,
kritik dan saran.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
xi
Penulis sangat mengharapkan kritik dan saran yang dapat membangun serta menyempurnakan tulisan. Semoga tugas akhir ini dapat dimanfaatkan dan dikembangkan lebih lanjut oleh peneliti lain sehingga tulisan ini dapat lebih bermanfaat bagi perkembangan Program Studi Teknik Elektro Universitas Sanata Dharma Yogyakarta.
Yogyakarta, 13 September 2011
HALAMAN PERSETUJUAN ... iii
HALAMAN PENGESAHAN ... iv
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP ... v
PERNYATAAN KEASLIAN KARYA ... vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS ... vii
INTISARI ... viii
1.2 Tujuan dan Manfaat Penelitian ... 2
1.3 Batasan Masalah ... 2
1.4 Metodologi Penelitian ... 2
BAB II. LANDASAN TEORI ... 6
2.1 Global System for Mobile Communications (GSM) ……… 6
2.1.1 Mobile Station (MS) ... 5
2.1.2 Base Station Subsystem (BSS) ... 5
2.1.3 Switching Subsystem (SS) ... 6
2.1.4 Operation and Support Subsystem (OSS) ... 6
2.2 Teknologi 3G ... 8
2.2.1 Video Call ... 8
2.3 Mikrokontroler AVR ATmega8535 ... 9
2.3.1 Arsitektur AVR ATmega8535 ... 9
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
xiii
2.3.2 Deskripsi Mikrokontroler ATmega8535 ... 10
2.3.3 Organisasi Memori ATmega8535 ... 11
2.3.3.1 . Memori Program………. 11
2.3.3.2 Memori Data………... 11
2.4 Interupsi ... 12
2.5 Timer/Counter ... 12
2.5.1 Timer/Counter0 ... 12
2.6 Pulse Width Modulation (PWM) ... 14
2.7 Motor Servo ... 15
2.8 Dual Tone Multi Frequency (DTMF) ... 17
2.8.1 DTMF Decoder (IC CM8870) ………. 19
2.9 Home Security... 22
BAB III. RANCANGAN PENELITIAN ... 23
3.1 Proses Kerja Sistem Pemantau Keamanan Rumah ... 23
3.2 Identifikasi Kebutuhan Perangkat ... 24
3.3 Perancangan Perangkat Keras (hardware) ... 24
3.3.1 Perancangan DTMF Decoder ………. 24
3.3.2 Perancangan Minimum Sistem ATmega8535 ... 26
3.3.3 Motor Servo ... 29
3.4 Perancangan Subsistem Perangkat Lunak ... 30
3.4.1 Diagram Alir Main Sistem ... 30
3.4.2 Diagram Alir Sub-Sistem ... 31
3.4.2.1 Diagram Alir Konversi Sinyal DTMF Ponsel Menjadi Data Biner Oleh DTMF Decoder ... 31
3.4.2.2 Diagram Alir Pergerakan Motor Servo Melalui Ponsel User ... 32
BAB IV. HASIL PENGAMATAN DAN PEMBAHASAN ... 38
4.1 Bentuk Fisik Sistem Pemantauan Keamanan Rumah ... 38
4.2 Hasil Data Pengujian Dan Pembahasan ... 40
xiv
4.2.2 Analisa Keberhasilan Alat ... 42
4.2.3 Pengujian Pergerakan Motor Servo Saat Video Call ... 44
4.2.4 Pengujian Keluaran Sinyal DTMF Saat Video Call ... 45
4.2.5 Pengujian Keluaran DTMF Decoder Saat Video Call ... 46
4.2.6 Pengamatan Pergerakan Motor Servo Saat Video Call ... 49
4.3 Perbandingan Antara Perancangan Dan Hasil Pengujian ... 50
BAB V. PENUTUP ... 51
5.1 Kesimpulan ... 52
5.2 Saran ... 52
DAFTAR PUSTAKA ... 53
LAMPIRAN
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
xv
DAFTAR GAMBAR
Halaman
Gambar 1.1. Blok model perancangan ... 5
Gambar 2.1. Elemen jaringan GSM………...6
Gambar 2.2. Konfigurasi pin mikrokontroler ATmega8535...10
Gambar 2.3. Mode phase correct PWM...13
Gambar 2.4. Mode fast PWM………...14
Gambar 2.5. Prinsip dasar kerja PWM………...15
Gambar 2.6. Motor servo...15
Gambar 2.7. Konfigurasi pin motor servo...16
Gambar 2.8. Sinyal untuk mengendalikan motor servo...16
Gambar 2.9. Lebar pulsa dan posisi motor servo...17
Gambar 2.10. Spektrum frekuensi nada DTMF...18
Gambar 2.11. Susunan kombinasi nada DTMF pada tombol………18
Gambar 2.12. Konfigurasi pin IC CM8870...19
Gambar 2.13. Penerapan Sistem Home Security………22
Gambar 3.1. Diagram blok sistem pengawasan keamanan rumah menggunakan aplikasi video call………24
Gambar 3.2. Rangkaian DTMF decoder………25
Gambar 3.3. Rangkaian oscillator ATmega8535………26
xvi
Gambar 3.5. Rangkaian Keseluruhan Sistem……….28
Gambar 3.6. Flow chart main sistem………..31
Gambar 3.7. Flow chart konversi sinyal DTMF menjadi data biner ………..32
Gambar 3.8. Motor servo bergerak ke arah kanan dengan nilai OCR 47.08 ( posisi 00)………33
Gambar 3.9. Motor servo bergerak ke arah tengah dengan nilai OCR 70.62 ( posisi 450)...34
Gambar 3.10. Motor servo bergerak ke arah kiri dengan nilai OCR 94.141 ( posisi 900)……….…….34
Gambar 3.11. Flow chart pergerakan motor servo melalui ponsel user……..……….36
Gambar 4.1. Diagram Blok Sistem Pemantaun Keamanan Rumah Dengan Menggunakan Perangkat Tambahan DTMF Encoder ...………39
Gambar 4.1. Hasil Implementasi Sistem Pemantaun Keamanan Rumah Menggunakan Aplikasi Video Call Pada Jaringan GSM 3G (Sisi Penerima)………..………..40
Gambar 4.2 Hasil Implementasi Sistem Pemantaun Keamanan Rumah Menggunakan Aplikasi Video Call Pada Jaringan GSM 3G (Sisi Pemancar)………40
Gambar 4.3 Hasil Video Call Saat Motor Bergerak Ke Arah Kiri………41
Gambar 4.4 Hasil Video Call Saat Motor Bergerak Ke Arah Tengah……….…41
Gambar 4.5 Hasil Video Call Saat Motor Bergerak Ke Arah Kanan……… 41
Gambar 4.6 Diagram Blok Mekanisme Pengujian Sistem Saat Menggunakan DTMF Encoder……….44
Gambar 4.7 Ouput DTMF 1 Saat Video Call………45
Gambar 4.8 Output Saat Tone 1 Ditekan………48
Gambar 4.9 Output Saat Tone 2 Ditekan………48
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
xvii
Gambar 4.10 Output Saat Tone 3 Ditekan………..48
Gambar 4.11 Output Saat Tone 4 Ditekan……….48
Gambar 4.12 Output Saat Tone 5 Ditekan……….48
Gambar 4.13 Output Saat Tone 6 Ditekan……….48
Gambar 4.14 Output Saat Tone 7 Ditekan……….49
Gambar 4.15 Output Saat Tone 8 Ditekan……….49
Gambar 4.16 Output Saat Tone 9 Ditekan……….49
Gambar 4.17 Input Tone 1 Motor Bergerak Ke Arah Kanan………..49
Gambar 4.18 Input Tone 2 Motor Bergerak Ke Arah Tengah………49
xviii
DAFTAR TABEL
Halaman
Tabel 2.1. Hubungan pin dan interupsi...12
Tabel 2.2. Kode yang dihasilkan CM8870 terhadap nada tombol………...21
Tabel 3.1. Konfigurasi port mikrokontroler...30
Tabel 3.2. Perhitungan derajat putaran motor servo………....31
Tabel 3.3. Data pengukuran motor servo……….32
Tabel 4.1. Data Hasil Pengujian Pergerakan Motor Servo Saat Video Call………42
Tabel 4.2. Perbandingan Hasil Pengujian Dan Perancangan Pergerakan Motor Servo………..45
Tabel 4.3. Menunjukkan Data Hasil Pengujian DTMF Decoder………47
Tabel 4.4. Perbandingan Hasil Pengujian Dan Perancangan DTMF Decoder……….50
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
1
BAB I
PENDAHULUAN
1.1.
Latar Belakang
Sistem komunikasi bergerak diyakini akan memegang peranan yang semakin penting dalam memenuhi kebutuhan telekomunikasi. Sistem komunikasi bergerak generasi ketiga (3G), seperti Universal Mobile Telecommunication System menyediakan berbagai macam fasilitas dan layanan bagi para pelanggannya. Hal ini disebabkan semakin meningkatnya kebutuhan masyarakat untuk berkomunikasi secara bergerak[1]. Aplikasi dan layanan tersebut antara lain adalah aplikasi multimedia, akses internet, transfer data kecepatan tinggi, serta aplikasi interaktif yang bersifat real time, seperti video call dan mobile tv.
Aplikasi video call dapat digunakan sebagai sarana komunikasi real time khususnya untuk dunia bisnis, kesehatan, dan pendidikan[2]. Aplikasi video call untuk dunia bisnis, biasanya disebut video conference, yaitu semacam video call tetapi dalam skala besar. Dalam dunia kesehatan, aplikasi ini diterapkan untuk penanganan medis dari jarak jauh untuk komunikasi tatap muka dengan pasien. Untuk dunia pendidikan, aplikasi video call ini digunakan untuk tatap muka dengan siswa, untuk berdiskusi, bereksperimen, dan bereksplorasi, baik dalam maupun luar negeri tanpa adanya batasan waktu dan tempat.
Dengan dimungkinkannya pengiriman data berupa video dan suara (voice) secara bersamaan, layanan multimedia dapat juga digunakan sebagai CCTV (Closed Circuit Television) yang dapat dilakukan dari jarak jauh untuk memonitor suatu lokasi. Proses monitor dilakukan menggunakan aplikasi video call dari telepon seluler (ponsel) pada jaringan GSM 3G. Berdasarkan pemikiran di atas, penulis ingin sekali dapat membuat suatu sistem pemantauan keamanan, khususnya keamanan rumah.
Pada penelitian terdahulu sudah ada yang mengembangkan sistem pengawasan keamanan rumah menggunakan robot berkaki[3]. Robot berkaki tersebut bekerja dengan berkeliling ruangan rumah serta memberikan informasi visual melalui video streaming ponsel kepada user secara otomatis dan realtime.
Dengan sistem pemantauan kemananan rumah yang menggunakan aplikasi video call pada jaringan 3G ini, pengamanan terhadap rumah diharapkan dapat ditingkatkan. Pemilik rumah dapat mengecek situasi rumah secara real setiap saat melalui ponsel.
2 Sistem yang dibuat akan bekerja apabila user ingin mengecek kondisi rumah dengan melakukan pengendalian jarak jauh ke ponsel sistem dengan cara melakukan pemanggilan video call ke ponsel sistem. Ponsel sistem yang terhubung dengan motor servo dapat dikendalikan untuk bergerak ke kanan dan ke kiri. Proses pengendalian pergerakan ponsel sistem dilakukan melalui keypad ponsel user dengan menggunakan teknik DTMF (Dual Tone Multiple Frequency). Minimum system akan bertindak untuk mengolah data sesuai interupsi yang diperintahkan oleh ponsel user (pemilik rumah). Sistem yang akan dibuat diberi judul ‘Sistem Pemantauan Keamanan Rumah Menggunakan Aplikasi Video Call Pada Jaringan GSM 3G ‘
1.2.
Tujuan dan Manfaat Penelitian
Tujuan penelitian ini adalah menghasilkan suatu sistem pemantauan keamanan rumah menggunakan aplikasi video call pada jaringan GSM 3G.
Manfaat dari penelitian ini adalah user (pemilik rumah) dapat memantau kondisi rumah secara langsung dari ponsel setiap saat melalui sistem video call. Penelitian ini diharapkan dapat digunakan sebagai sumber referensi untuk penelitian lebih lanjut tentang aplikasi teknologi video call.
1.3.
Batasan Masalah
Batasan masalah dalam penelitian ini adalah:
a. Mikrokontroler yang digunakan adalah AVR ATMega8535 dan diprogram dengan menggunakan bahasa C.
b. Ponsel menggunakan ponsel Nokia N70
c. Pengendali jarak jauh menggunakan ponsel 3G melalui jaringan GSM.
d. Pengendalian sistem oleh user melalui video call dan pengiriman Dual Tone Multiple Frequency (DTMF).
e. Motor servo sebagai beban penggerak ponsel sistem untuk bergerak ke kanan dan ke kiri.
f. Sistem ini bekerja hanya satu arah saja yaitu dari sisi user sebagai pengendali sistem.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
1.4.
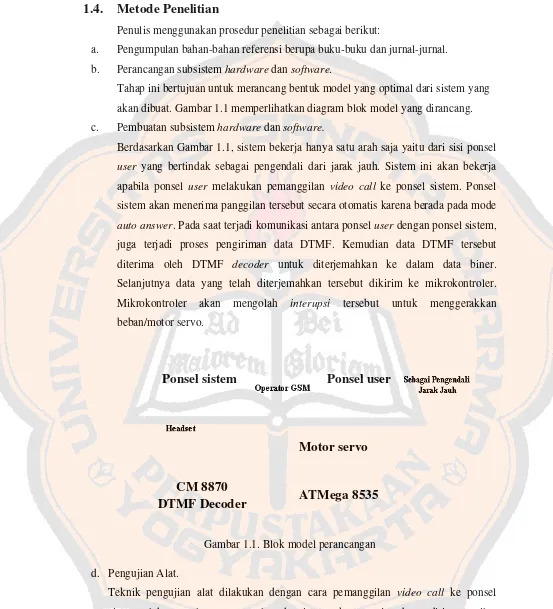
Metode Penelitian
Penulis menggunakan prosedur penelitian sebagai berikut:
a. Pengumpulan bahan-bahan referensi berupa buku-buku dan jurnal-jurnal. b. Perancangan subsistem hardware dan software.
Tahap ini bertujuan untuk merancang bentuk model yang optimal dari sistem yang akan dibuat. Gambar 1.1 memperlihatkan diagram blok model yang dirancang. c. Pembuatan subsistem hardware dan software.
Berdasarkan Gambar 1.1, sistem bekerja hanya satu arah saja yaitu dari sisi ponsel user yang bertindak sebagai pengendali dari jarak jauh. Sistem ini akan bekerja apabila ponsel user melakukan pemanggilan video call ke ponsel sistem. Ponsel sistem akan menerima panggilan tersebut secara otomatis karena berada pada mode auto answer. Pada saat terjadi komunikasi antara ponsel user dengan ponsel sistem, juga terjadi proses pengiriman data DTMF. Kemudian data DTMF tersebut diterima oleh DTMF decoder untuk diterjemahkan ke dalam data biner. Selanjutnya data yang telah diterjemahkan tersebut dikirim ke mikrokontroler. Mikrokontroler akan mengolah interupsi tersebut untuk menggerakkan beban/motor servo.
Gambar 1.1. Blok model perancangan d. Pengujian Alat.
Teknik pengujian alat dilakukan dengan cara pemanggilan video call ke ponsel sistem oleh ponsel user, ponsel pada sistem akan menjawab sendiri panggilan
Ponsel sistem
Ponsel user
CM 8870
DTMF Decoder
ATMega 8535
4 tersebut secara otomatis. Pengiriman data DTMF dilakukan dengan cara penekanan tombol keypad ponsel oleh user untuk mengendalikan motor servo.
e. Pengambilan Data.
Teknik pengambilan data dilakukan dengan melihat tanggapan mikrokontroler untuk menggerakkan motor servo ke kanan dan ke kiri. Proses pengambilan data terjadi pada keluaran port mikrokontroler. Data yang diambil berupa data biner oleh mikrokontroler. Pengujian kebenaran data dilakukan dengan melihat tingkat keberhasilan ponsel sistem dalam menjawab panggilan video call secara otomatis dan pergerakkan motor servo untuk bergerak ke kanan dan ke kiri.
f. Analisis dan Penyimpulan Hasil Percobaan.
Analisa data dilakukan dengan melihat kesesuaian antara data yang diperoleh saat perancangan dan teori. Jika terjadi perbedaan data saat pengujian, maka analisis dilakukan dengan mengecek kesesuaian nilai-nilai komponen yang digunakan pada perancangan dan penggunaan logika saat perancangan perangkat lunak. Untuk mengkonfirmasi error yang terjadi, maka hasil perancangan dibuktikan dengan teori. Pengambilan kesimpulan dapat dilakukan dengan merangkum hasil pembahasan/analisis.
1.5.
Sistematika Penulisan
Sistematika penulisan tugas akhir ini adalah sebagai berikut:
BAB I: PENDAHULUAN
Bab ini berisi latar belakang masalah, tujuan dan manfaat, batasan masalah, metodologi penelitian dan sistematika penulisan.
BAB II : DASAR TEORI
Bab ini berisi teori-teori yang mendukung kerja sistem dan teori yang digunakan dalam perancangan.
BAB III: PERANCANGAN DAN PENELITIAN
Bab ini berisi penjelasan alur perancangan sistem keamanan pemantauan keamanan rumah menggunakan aplikasi video call pada jaringan 3G GSM.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
BAB IV : HASIL DAN PEMBAHASAN
Bab ini berisi hasil perancangan dan pembahasan data yang diperoleh.
BAB V : KESIMPULAN DAN SARAN
6
BAB II
DASAR TEORI
2.1 Global System for Mobile Communications
Global System for Mobile Communications (GSM) muncul pada pertengahan 1991 dan dijadikan standar telekomunikasi seluler untuk seluruh Eropa oleh European Telecomunication Standard Institute (ETSI)[4]. Pengoperasian GSM secara komersil dimulai pada awal kuartal terakhir 1992. GSM merupakan teknologi yang kompleks dan butuh pengkajian yang mendalam untuk bisa dijadikan standar. Standar type approval untuk ponsel disepakati dengan mempertimbangkan dan memasukkan puluhan item pengujian dalam memproduksi GSM.
GSM telah mengantisipasi perkembangan jumlah penggunanya yang sangat maju dan arah layanan per area yang tinggi. GSM mengatasi perkembangan tersebut dengan Digital Cellular System (DCS) pada alokasi frekuensi 1800 MHz. Pada frekuensi tersebut, kapasitas pelanggan yang semakin besar per satuan sel akan dicapai. Selain itu, DCS akan dapat menurunkan kekuatan daya pancar ponsel dengan luas sel yang semakin kecil, sehingga bahaya radiasi yang timbul dapat dikurangi. Sel merupakan unit dasar sistem seluler. Setiap sel memiliki sebuah base station yang terdiri dari tower dan bangunan kecil berisi perangkat radio.
Pemakaian GSM kemudian meluas ke Asia dan Amerika, termasuk Indonesia. Indonesia awalnya menggunakan sistem ponsel analog yang bernama Advances Mobile
Phone System (AMPS) dan Nordic Mobile Telephone (NMT). Namun dengan hadir dan
dijadikan standar sistem komunikasi seluler membuat sistem analog perlahan menghilang, tidak hanya di Indonesia, tetapi juga di Eropa. Pengguna GSM pun semakin lama semakin bertambah. Akhirnya GSM tumbuh dan berkembang sebagai sistem telekomunikasi seluler yang paling banyak digunakan di seluruh dunia.
Jaringan GSM dibagi menjadi 4 subsistem utama: Mobile Station (MS), Switching Subsystem (SS), Base Station Subsystem (BSS), dan Operation and Support Subsystem (OSS). Secara umum, network element dalam jaringan GSM ditunjukkan pada Gambar 2.1.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
Gambar 2.1. Elemen Jaringan GSM[4]
2.1.1 Mobile Station
Mobile Station (MS) merupakan perangkat yang digunakan oleh pelanggan untuk melakukan proses komunikasi. MS terdiri atas :
a. Mobile Equipment
Mobile Equipment (ME) atau telepon seluler (ponsel) merupakan perangkat GSM yang berada di sisi pengguna atau user yang berfungsi sebagai terminal transceiver (pengirim dan penerima sinyal) untuk berkomunikasi dengan perangkat GSM lainnya. ME diidentifikasikan dengan International Mobile Equipment Identity (IMEI) tertentu. IMEI merupakan nomor seri perangkat dengan tipe kode tertentu.
b. Subscriber Identity Module
Subscriber Identity Module (SIM) atau SIM Card atau smart card merupakan kartu yang berisi seluruh informasi pelanggan dan beberapa informasi pelayanan. ME tidak dapat digunakan tanpa SIM di dalamnya.
2.1.2 Base Station Subsystem
Base Station Subsystem (BSS) terdiri dari : a. Base Transceiver Station
Base Transceiver Station (BTS) merupakan perangkat pemancar dan penerima
yang memberikan layanan radio kepada mobile station (MS). BTS juga terdapat kanal trafik yang digunakan untuk komunikasi.
b. Base Station Controller
8
Base Station Controller (BSC) membawahi satu atau lebih BTS serta mengatur trafik yang datang dan pergi dari BSC menuju sentral atau BTS. BSC mengatur sumber radio dalam pemberian frekuensi untuk setiap BTS dan mengatur handover ketika MS melewati batas antar sel
2.1.3 Switching Subsystem
Switching Subsystem (SS) bertanggung jawab untuk melakukan pemrosesan
panggilan dan fungsi yang berhubungan dengan pelanggan. SS meliputi unit fungsional yang terdiri atas:
a. Mobile Switching Center
Mobile Switching Center (MSC) didesain sebagai switch Integrated Service Digital Networ (ISDN) yang dimodifikasi agar berfungsi untuk jaringan seluler. MSC juga dapat menghubungkan jaringan seluler dengan jaringan fixed.
b. Home Location Register
Home Location Register (HLR) merupakan database yang berisi data pelanggan yang tetap. Data tersebut antara lain, layanan pelanggan, layanan tambahan, serta informasi mengenai lokasi pelanggan yang paling akhir (update).
c. Visitor Location Register
Visitor Location Register (VLR) merupakan database yang berisi informasi sementara mengenai pelanggan, terutama mengenai lokasi dari pelanggan pada cakupan area jaringan.
d. Authentication Center
Authentication Center (AuC) merupakan database informasi rahasia yang disimpan dalam bentuk format kode. AuC digunakan untuk mengontrol penggunaan jaringan yang sah dan mencegah semua pelanggan yang melakukan kecurangan.
e. Equipment Identity Registration
Equipment Identity Registration (EIR) merupakan register penyimpan data seluruh MS. EIR berisi IMEIs (international Mobile Equipment Identities).
2.1.4
Operation and Support Subsystem
Operation and Support Subsystem (OSS) berfungsi sebagai pusat pengendalian, di antaranya fault management, configuration management, performance management, dan inventory management.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
2.2 Teknologi
3G
Perkembangan teknologi telekomunikasi di dunia berkembang sangat maju dikarenakan kebutuhan untuk berkomunikasi dan bertukar data dengan cepat, mudah dan mobile. Pada awal pembahasan dimulai dengan Global System for Mobile Communications (GSM). GSM merupakan teknologi generasi kedua. Sesudah GSM perkembangan teknologi menuju generasi ketiga yaitu 3G.
Teknologi 3G atau Third Generation Technology adalah istilah untuk generasi dari perkembangan teknologi dan standar telekomunikasi mobile yang didasarkan pada standar yang dikeluarkan oleh lembaga International Telecommunication Union (ITU)[5]. Penggunaan teknologi tersebut menghasilkan peningkatan kecepatan data dibandingkan dengan teknologi sebelumnya. Kecepatan transmisi data pada teknologi 2G hanya mencapai 9,6 Kbps (Kilo bit per detik) hingga 14,4 Kbps. Sedangkan teknologi 3G memungkinkan kecepatan transmisi data meningkat menjadi 144 Kbps, jika pengguna bergerak kecepatan sangat tinggi. Jika pengguna teknologi 3G bergerak dengan kecepatan rendah, maka kecepatan transmisi datanya mencapai 384 kbps. Kecepatan transmisi data tertinggi sebesar 2 Mbps (Mega bit per detik) dapat dicapai jika pengguna dalam keadaan diam.
Peningkatan kecepatan transmisi data tersebut, memungkinkan layanan yang sebelumnya tidak dapat dilakukan karena keterbatasan kecepatan, misalnya layanan video call[5]. Teknologi 3G juga mendukung akses mobile TV untuk menonton tayangan televisi melalui telepon seluler yang kita gunakan. Selain jenis layanan yang bertambah, teknologi 3G juga meningkatkan kemampuan layanan akses internet sehingga memudahkan para pengguna untuk mendapatkan informasi yang mereka butuhkan dalam waktu yang singkat.
Sejak September 2006, Indonesia sudah mulai mengenal layanan 3G[6]. Jenis layanan dasar teknologi 3G dari para operator seluler di Indonesia adalah video call, mobile TV, video streaming, akses internet, dan beragam konten yang dapat diunduh. Secara umum penggunaan 3G di Indonesia belum meluas dan merata. Layanan-layanan 3G belum bisa menggeser short message service (SMS) dan voice call sebagai layanan unggulan dari para operator telepon seluler.
2.2.1
Video Call
Layanan video pada teknologi 3G yang saat ini dikenal oleh masyarakat antara lain video streaming, video call, video conference, dan video on demand yang menggunakan
10
streaming video[7]. Video call merupakan layanan yang berbasis informasi gambar bergerak (video) dan suara[8]. Layanan video call dapat membuat penggunanya bertatap muka langsung dan berkomunikasi melalui layar ponsel.
Layanan video call pada teknologi 3G membutuhkan transfer data berkecepatan tinggi mencapai 2 Mbps untuk user yang sedang diam, kecepatan 384 Kbps untuk user yang sedang berjalan, dan 144 Kbps untuk kecepatan orang berkendaraan[7]. Layanan video call membutuhkan ponsel dengan fitur 3G. Adapun kelemahan layanan video call adalah terletak pada sinyal yang berpengaruh pada gambar. Hal ini dikarenakan gambar video pada layanan video call mempunyai ukuran data yang lebih besar dibandingkan suara. Apabila sinyal yang diterima kurang baik, maka gambar video yang dikirim akan lambat dan gambar video yang diterima kurang bagus.
2.3 Mikrokontroler
AVR
ATMega8535
Alf and Vegard’s Risc Processor (AVR) merupakan seri mikrokontroler CMOS 8-bit yang diproduksi oleh Atmel berbasis arsitektur Reduced Instruction Set Computer (RISC)[9]. Chip AVR yang digunakan untuk tugas akhir ini adalah ATMega8535. Hampir semua instruksi dieksekusi dalam satu siklus clock dan mempunyai 32 register general-purpose, timer/counter fleksibel dengan mode compare, interupsi internal dan eksternal, serial UART, programmable Watchdog Timer, dan mode power saving. AVR juga mempunyai Analog Digital Converter (ADC), Pulse Width Modulation (PWM) internal, dan In-System Programmable Flash on-chip yang memungkinkan memori program untuk diprogram ulang .
2.3.1 Arsitektur AVR ATMega8535
Mikrokontroler ATMega8535 memiliki arsitektur sebagai berikut[9] : a. Saluran IO sebanyak 32 buah, yaitu Port A, Port B, Port C dan Port D b. ADC 10 bit sebanyak 8 Channel
c. Tiga buah timer/counter yaitu Timer 0, Timer 1, dan Timer 2 d. Watchdog Timer dengan osilator internal
e. SRAM sebanyak 512 byte f. Memori Flash sebesar 8 kb
g. Sumber Interupsi internal dan eksternal h. Port SPI (Serial Pheriperal Interface)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
i. EEPROM on board sebanyak 512 byte j. Komparator analog
k. Port USART (Universal Shynchronous Ashynchronous Receiver Transmitter)
2.3.2 Deskripsi Mikrokontroler ATMega8535
Konfigurasi Pin Mikrokontroller ATMega8535 dengan kemasan 40-pin DIP (dual in-line package) dapat dilihat pada Gambar 2.2[8]. Untuk memaksimalkan performa, AVR menggunakan arsitektur Harvard (dengan memori dan bus terpisah untuk program dan data). Ketika sebuah instruksi sedang dikerjakan, instruksi berikutnya diambil dari memori program.
Gambar 2.2. Konfigurasi Pin Mikrokontroler ATMega8535[9]
Mikrokontroler Atmega8535 memiliki konfigurasi Pin sebagai berikut[9] : a. VCC (power supply).
b. GND (ground). c. Port A (PA7..PA0).
Port A berfungsi sebagai input analog pada A/D Converter. Port A juga berfungsi sebagai suatu Port I/O 8-bit dua arah.
d. Port B (PB7..PB0).
Port B adalah suatu Port I/O 8-bit dua arah dengan resistor internal pull-up (yang dipilih untuk beberapa bit).
e. Port C (PC7..PC0).
12
Port C adalah suatu Port I/O 8-bit dua arah dengan resistor internal pull-up (yang dipilih untuk beberapa bit).
f. Port D (PD7..PD0).
Port D adalah suatu Port I/O 8-bit dua arah dengan resistor internal pull-up (yang dipilih untuk beberapa bit).
g. RESET (Reset input). h. XTAL1 (Input Oscillator). i. XTAL2 (Output Oscillator).
j. AVCC adalah pin penyedia tegangan untuk Port A dan ADC. k. AREF adalah pin referensi analog untuk ADC.
2.3.3 Organisasi Memori AVR ATMega8535
Arsitektur AVR mempunyai dua ruang memori utama, memori ruang data, dan memori ruang program[9]. Sebagai tambahan, Atmega8535 juga memiliki fitur memori EEPROM untuk penyimpanan data.
2.3.3.1 Memori Program
Kode program disimpan dalam flash memory, yaitu jenis memori non-volatile yang tidak akan hilang datanya meskipun catu daya dimatikan[10]. Pada ATMega8535 terdapat 8Kbyte On-Chip di dalam sistem memory flash reprogrammable untuk penyimpanan program. Untuk keamanan perangkat lunak, memori flash dibagi menjadi dua bagian, yaitu boot program dan bagian aplikasi program[9].
2.3.3.2 Memori Data
Memori data adalah memori Random Access Memory (RAM) yang digunakan untuk keperluan program[11]. Memori data terbagi menjadi 4 bagian yaitu: 32 General Purphose Register (GPR). GPR adalah register khusus yang bertugas untuk membantu eksekusi program oleh Arithmatich Logic Unit (ALU).
I/O register dan Aditional I/O register adalah register yang difungsikan khusus untuk mengendalikan berbagai pheripheral di dalam mikrokontroler seperti pin, port, timer/counter[11].
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
2.4 Interupsi
Interupsi adalah suatu kondisi saat mikrokontroler akan berhenti sementara dari program utama untuk melayani instruksi-instruksi pada interupsi, kemudian kembali mengerjakan instruksi program utama setelah instruksi-instruksi pada interupsi selesai dikerjakan[12].
Table 2.1 Hubungan PIN dan Interupsi[12]
Jenis interupt PIN pada ATMega8535
INT0 PORTD.2 INT1 PORTD.3 INT2 PORTB.2
ATMega8535 menyediakan tiga interupsi eksternal yaitu, INT0, INT1, dan INT2. Masing-masing interupsi tersebut terhubung dengan pin ATMega8535 seperti ditunjukkan pada Tabel 2.1. Interupsi eksternal bisa dilakukan dengan memberikan logika 0 atau perubahan logika pada pin interupsi yang bersangkutan.
2.5 Timer/Counter
ATMega8535 memiliki tiga modul timer yang terdiri dari dua buah timer/counter 8 bit dan satu buah timer/counter 16 bit[10]. Ketiga modul ini dapat diatur dalam mode yang berbeda-beda secara individu dan tidak saling mempengaruhi satu sama lain. Selain itu semua timer/counter juga dapat difungsikan sebagai sumber interupsi.
2.5.1
Timer/counter0
Timer/counter0 merupakan modul timer/counter 8 bit dengan fitur sebagai berikut : a. Timer/counter 1 kanal
b. Auto reload yaitu timer akan dinolkan kembali saat match compare c. Dapat menghasilkan pulsa PWM dengan glitch free
d. Frequency generator
e. Prescalar 10 bit untuk timer
14
Perhitungan overflow interrupt sebagai pembangkit PWM ditunjukkan pada persamaan berikut[13]:
(2.1)
(2.2)
dengan TO adalah timer overflow (T x bit timer), OCR adalah nilai cacahan pulsa (Output Compare Register/OCR), dan T adalah lebar pulsa.
Mode-mode operasi timer adalah sebagai berikut: a. Mode normal
Pada mode normal, timer digunakan untuk menghitung saja, membuat delay, dan menghitung selang waktu[14].
b. Mode phase correct PWM (PCP)
Mode phase correct PWM digunakan untuk menghasilkan sinyal PWM. Selanjutnya, nilai register counter (TCNT0) mencacah naik dan mencacah turun. Pada saat mencacah, nilai register counter (TCNT0) secara terus menerus akan selalu dibandingkan dengan register pembanding OCR0[10]. Hasil perbandingan register TCNT0 dan OCR0 digunakan untuk membangkitkan sinyal PWM yang dikeluarkan pada OC0 seperti ditunjukkan Gambar 2.3.
Gambar 2.3. Mode Phase Correct PWM[10]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
c. Clear timer on compare match (CTC)
Pada CTC, register counter (TCNT0) akan mencacah naik kemudian reset atau kembali menjadi 0x00 pada saat nilai TCNT0 sama dengan OCR0. Sebelumnya nilai OCR ditentukan terlebih dahulu, karena timer 0 dan 2 mempunyai nilai maksimum 255, sehingga range OCR adalah 0-255[10].
d. Fast PWM
Mode ini hampir sama dengan mode phase correct PWM, hanya saja perbedaannya adalah register counter TCNT0 mencacah naik saja dan tidak pernah mencacah turun seperti diperlihatkan Gambar 2.4[10].
Gambar 2.4 Mode Fast PWM[10]
2.6
Pulse Width Modulation
Salah satu cara untuk mengirimkan informasi analog adalah dengan menggunakan pulsa-pulsa tegangan atau pulsa-pulsa arus[15]. Pada saat modulasi pulsa, sinyal pembawa informasi terdiri dari pulsa-pulsa persegi yang berulang-ulang. Salah satu teknik modulasi pulsa yang digunakan adalah teknik modulasi durasi atau lebar dari waktu tunda positif maupun waktu tunda negatif dari pulsa-pulsa persegi tersebut. Metode tersebut dikenal dengan nama Pulse Width Modulation (PWM).
Pulse width modulation (PWM) diperoleh dengan bantuan sebuah gelombang kotak dengan mengubah-ubah siklus kerja (Duty Cycle) gelombang tersebut[15]. Hal ini
16
bertujuan untuk mendapatkan sebuah tegangan keluaran yang bervariasi yang merupakan nilai rata-rata dari gelombang tersebut. Gambar 2.5 menunjukkan prinsip dasar kerja PWM.
Gambar 2.5. Prinsip dasar kerja PWM[15]
Ton pada Gambar 2.5 menunjukkan waktu saat tegangan keluaran berada pada
posisi tinggi (High) dan Toff menunjukkan waktu saat tegangan keluaran berada pada
posisi rendah (Low). Sedangkan, Ttotal merupakan jumlah antara Tondan Toff.Hal ini biasa dikenal dengan istilah periode satu gelombang (waktu dalam satu siklus).
2.7
Motor Servo
Motor servo adalah sebuah motor dengan sistem kerja closed feedback, artinya posisi dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo[16]. Motor servo terdiri dari sebuah motor, serangkaian gear, potensiometer, dan rangkaian kontrol. Gambar 2.6 memperlihatkan motor servo.
Gambar 2.6. Motor Servo[16]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
Motor servo dikemas dalam bentuk kotak segi empat. Motor servo dilengkapi dengan sebuah output shaft dan tiga buah konektor kabel yaitu power, control, dan ground seperti ditunjukkan pada Gambar 2.7[16]. Gear pada motor servo ada yang terbuat dari plastik dan metal atau titanium. Di dalam motor servo terdapat potensiometer yang digunakan sebagai sensor posisi. Potensiometer tersebut dihubungkan dengan output shaft untuk mengetahui posisi aktual shaft. Apabila motor dc berputar, maka output shaft juga berputar dan sekaligus memutar potensiometer. Rangkaian kontrol dapat membaca kondisi potensiometer tersebut untuk mengetahui posisi aktual shaft. Jika posisi motor sesuai dengan yang diinginkan, maka motor DC akan berhenti.
Gambar 2.7. Konfigurasi Pin Motor Servo[16] Ada dua jenis motor servo yaitu[16] :
1. Motor servo standard, yaitu motor servo mampu bergerak Counter Wise (CW) dan Counter Clock Wise (CCW) dengan sudut operasi tertentu, misalnya 60°, 90°, atau 180°.
2. Motor servo continuous, motor servo yang mampu bergerak CW dan CCW tanpa batasan sudut operasi (berputar secara kontiyu)
Motor servo biasanya menggunakan tegangan 4,8V hingga 7,2V. Motor servo dapat dikendalikan dengan cara mengirimkan sebuah pulsa yang lebarnya bervariasi. Lebar pulsa yang digunakan biasanya antara 1 ms sampai 2 ms dengan periode pulsa sebesar 20 ms.
18
Lebar pulsa akan menimbulkan perubahan posisi pada motor servo. Misalnya sebuah pulsa 1,5 ms akan memutar motor pada posisi 90° (posisi netral). Agar posisi servo tetap pada posisi, maka pulsa harus terus diberikan pada motor servo. Apabila ada gaya yang melawan, maka servo akan tetap bertahan pada posisinya. Gaya maksimum servo tergantung dari rentang torsi servo.
Gambar 2.9. Lebar Pulsa dan Posisi Servo[12]
Apabila pulsa yang dikirim ke motor servo kurang dari 1 ms, maka servo akan berputar CCW menuju ke posisi tertentu dari posisi netral. Jika pulsa yang dikirim lebih dari 1,5 ms, maka servo akan berputar CW menuju posisi tertentu dari posisi netral seperti ditunjukkan pada Gambar 2.9. Setiap servo memiliki spesifikasi lebar pulsa minimum dan maksimum sendiri-sendiri, tergantung jenis dan merk servo. Umumnya, lebar pulsa yang digunakan antara 1 ms sampai 2 ms. Parameter lain yang berbeda antara servo satu dengan servo lainnya adalah kecepatan servo untuk berubah dari posisi satu ke posisi lainnya (operating speed).
2.8
Dual Tone Multi Frequency
Dual Tone Multi Frequency (DTMF) merupakan suatu gelombang frekuensi yang terdiri dari dua buah kelompok nada, yaitu kelompok nada rendah dan kelompok nada tinggi[17]. Frekuensi 697-941 Hz merupakan kelompok nada rendah dan frekuensi 1209-1633 Hz merupakan kelompok nada tinggi. Frekuensi-frekuensi yang dihasilkan tersebut berasal dari penekanan tombol telepon. Masing-masing kelompok mempunyai empat nada tunggal yang dipilih sedemikian rupa. Hal tersebut bertujuan, agar frekuensi harmonik
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
yang timbul tidak akan mengganggu frekuensi lainnya. Gambar 2.10 menunjukkan Spektrum frekuensi nada DTMF.
Gambar 2.10. Spekrum frekuensi nada DTMF[17]
Gambar 2.10 memperlihatkan bahwa nada tunggal 697 Hz mempunyai pita frekuensi dari 685 Hz - 709 Hz. Gambar 2.10 menunjukkan pita frekuensi a,b,c, dan d tidak akan pernah mengganggu pita frekuensi kelompok nada tinggi, karena letaknya diluar pita frekuensi nada tinggi. Kelompok nada tinggi mempunyai penguatan sebesar 2 dB dari kelompok nada rendah. Hal ini disebabkan kelompok nada tinggi lebih mudah mengalami pelemahan dibandingkan kelompok nada rendah, sehingga penguatan ini akan mengimbangi pelemahan yang terjadi.
Penjumlahan dari dua kelompok nada DTMF menghasilkan 16 kombinasi nada. Kombinasi ini mewakili karakter 0-9, *, dan #, serta karakter tambahan A, B, C, dan D seperti yang diperlihatkan pada Gambar 2.11.
20
Jika dilakukan penekanan pada salah satu tombol telepon, maka akan menghasilkan perpaduan dua buah kelompok nada yang mewakili tombol tersebut. Sebagai contoh, penekanan pada tombol “1” akan menghasilkan paduan frekuensi 697 Hz dan 1209 Hz.
2.8.1 DTMF Decoder (IC CM8870)
DTMF decoder berfungsi mengkodekan nada DTMF menjadi data biner 4 bit[17]. Decoder ini memeriksa nada yang masuk dan mengubahnya menjadi data biner. Integrated circuit (IC) CM8870 merupakan produksi dari Mitel. IC ini dikemas dalam bentuk Dual In-line Package (DIP) 18 pin. Gambar 2.12 menunjukkan konfigurasi pin IC CM8870.
Gambar 2.12. Konfigurasi pin IC CM8870[17]
IC CM8870 mempunyai konfigurasi pin sebagai berikut[18]: a. Pin 1
Input Inverting (IN-). b. Pin 2
Input Non Inverting (IN+). c. Pin 3
Gain Select (GS) berfungsi memberikan akses output penguat differensial melalui resistor umpan balik.
d. Pin 4
Tegangan Referensi (VREF )merupakan referensi tegangan keluaran (setengah dari tegangan catu daya).
e. Pin 5
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
INH (Inhibit) adalah pin input. Saat berlogika tinggi (high), inhibit akan mendeteksi karakter A, B, C, dan D. Apabila berlogika rendah (low), maka karakter tersebut diabaikan.
f. Pin 6
Power Down (PD) merupakan hubungan internal harus dihubungkan ke Vss. g. Pin 7
Inputoscillator
h. Pin 8
Outputoscillator
i. Pin 9
VSS merupakan catu daya negatif j. Pin 10
Three State Output Enable (TOE) merupakan logika tinggi yang memungkinkan output
Q1-Q4.Pin ini pull-up ke input. k. Pin 11-14
Pin ini berfungsi sebagai output data biner. l. Pin 15
Delayed Steering (StD) menghasilkan logika tinggi saat tone diterima dan disimpan pada keluaran latch. Pin ini berlogika rendah ketika tegangan pada St/Gt di bawah VTSt.
m. Pin 16
Early Steering output (ESt) akan berlogika tinggi ketika tone terdeteksi . Saat berada pada kondisi kehilangan sinyal, ESt akan kembali kelogika rendah.
n. Pin 17
Steering input (St) / Guard time output (Gt). Apabila St mendeteksi tegangan lebih besar dari VTSt, maka tone yang telah diterima akan digeser dan disimpan pada ouput latch. Sedangkan, tegangan yang lebih rendah dari VTSt akan membebaskan tone yang baru diterima.
o. Pin 18
VDD merupakan tegangan power supply positif.
Secara umum, prinsip decoder DTMF adalah untuk menterjemahkan nada-nada tombol telepon yang berupa frekuensi menjadi data biner[17]. IC CM8870 merupakan IC
22
penerima DTMF yang didalamnya terdapat Band Pass Filter (BPF). BPF berfungsi memisahkan nada tinggi dan nada rendah. Selanjutnya, comparator mengubah gelombang sinus tersebut menjadi gelombang segi empat. Gelombang segi empat diteruskan ke rangkaian pendeteksi digital yang bertujuan menghitung periode rata-rata dari dua gelombang segi empat yang masuk. Rangkaian ini memerlukan osilator eksternal yang dapat diperoleh dari sebuah kristal 3,579 MHz. Converter akan mengubah keluaran pendeteksi digital menjadi kode biner 4 bit dari 0000 hingga 1111 yang mewakili keenambelas tombol telepon. Data biner ini dikeluarkan melalui port Q1-Q4. Tabel 2.2 memperlihatkan kode biner yang dihasilkan oleh IC CM8870 terhadap nada tombol.
Tabel 2.2. Kode yang dihasilkan CM8870 terhadap nada tombol telepon[17]
Tone Output Enable (TOE) memungkinkan port Q1-Q4 untuk mengeluarkan data biner apabila diberi logika tinggi. Jika TOE diberi input logika rendah, maka ouput Q1-Q4 memiliki impedansi tinggi (Z). EarlySteering (Est) digunakan untuk mengatur pewaktuan dan pengendalian sinyal yang dikodekan, dengan mendeteksi sah atau tidaknya sinyal DTMF tersebut.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
2.9
Home Security
Sistem keamanan rumah dapat menggunakan teknologi wireless atau alarm rumah wireless yang menggunakan teknologi telekomunikasi selular (GSM) yang dapat membuat pemilik rumah selalu dapat mengontrol dan memantau rumahnya melalui ponsel[19]. Gambar 2.13 memperlihatkan penerapan sistem home security.
Gambar 2.13 Penerapan Sistem Home Security
Fungsi perangkat home security secara umum dengan teknologi wireless:
a. Menggunakan jaringan GSM, jadi rumah dapat dipantau dari mana saja dan kapan saja dengan menggunakan ponsel.
b. Bila ada pencuri, alarm akan berbunyi nyaring dan dalam waktu yang bersamaan menelepon nomor ponsel pemilik rumah secara otomatis.
c. Pemilik rumah dapat memantau atau memonitor situasi rumah setiap saat dengan menelpon nomor alarm.
24
d. Mengaktifkan alarm dan menonaktifkan alarm dengan call, SMS, dan remote alarm. e. Mengaktifkan alarm dan menonaktifkan alarm dengan SMS dan remote alarm. f. Masuk ke sistem alarm harus menggunakan password supaya tidak sembarang orang
bisa masuk ke sistem keamanan rumah.
g. Apabila pencuri masuk kedalam rumah, maka alarm akan berbunyi. h. Sistem dapat bekerja dengan semua jenis sensor dan detektor.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
25
BAB III
PERANCANGAN DAN PEMBUATAN
Bab ini akan menjelaskan perancangan perangkat lunak dan keras sistem pemantauan keamanan rumah dengan aplikasi video call. Pembahasan ini meliputi:
a. Proses kerja sistem pemantauan keamanan rumah menggunakan aplikasi video call pada
jaringan 3G GSM.
b. Perancangan perangkat keras (hardware). c. Perancangan perangkat lunak (software).
3.1 Proses
Kerja
Sistem
Pemantauan Keamanan Rumah
Prinsip kerja dari sistem perangkat pemantauan keamanan rumah adalah dengan
memanfaatkan layanan video call pada jaringan GSM 3G yang ditunjukkan pada Gambar 3.1.
Gambar 3.1 Diagram Blok Sistem Pemantauan Keamanan Rumah Menggunakan Aplikasi Video Call
Sistem ini bekerja hanya satu arah saja yaitu dari sisi ponsel user yang bertindak sebagai pengendali dari jarak jauh. Sistem ini akan bekerja apabila ponsel user melakukan pemanggilan video call ke ponsel sistem. Ponsel sistem akan menerima panggilan tersebut
26
juga dapat dikirimkan. Data yang dikirim berupa frekuensi dari nada-nada tone keypad
yang diterima oleh DTMF decoder untuk diterjemahkan ke dalam data biner. Kemudian data yang telah diterjemahkan tersebut dikirim ke mikrokontroler. Mikrokontroler akan
mengolah interupsi tersebut untuk menggerakkan beban/motor servo sesuai dengan data yang dikirimkan.
3.2. Identifikasi
Kebutuhan
Perangkat
Sistem pemantauan keamanan rumah menggunakan aplikasi video call pada
jaringan GSM 3G terdiri dari beberapa perangkat utama (rangkaian) yaitu:
1. Ponsel pada sisi pengguna digunakan sebagai media perintah untuk melakukan pemanggilan video call.
2. Ponsel sistem digunakan sebagai media penerima informasi ponsel user.
3. ATMega8535 digunakan untuk pengolah data dan pengendali utama seluruh sistem.
4. DTMF decoder sebagai penerjemah nada-nada tone keypad ponsel berupa frekuensi ke dalam data biner.
5. Motor servo digunakan untuk menggerakkan ponsel sistem.
3.3. Perancangan
Perangkat
Keras
(
hardware
)
3.3.1. Perancangan DTMF Decoder
DTMF decoder menggunakan IC CM8870. IC CM8870 ditunjukkan pada Gambar 3.2. Penentuan nilai komponen dilakukan berdasarkan datasheet IC CM8870.
Gambar 3.2. Rangkaian DTMF decoder[17]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
Rangkaian DTMF decoder akan mengubah nada tone, yang berupa frekuensi yang dikirimkan oleh keypad ponsel, menjadi 4 bit data biner. Jika yang diterima ialah nada tone
1, maka output yang dihasilkan oleh rangkaian ini adalah 0001 begitu seterusnya. Output
yang dihasilkan dari rangkaian ini akan dihubungkan ke mikrokontroler sehingga mikrokontroler dapat mengenali data yang dikirimkan oleh rangkaian ini. Mikrokontroler akan mengolah interupsi tersebut untuk menggerakkan beban/motor servo sesuai dengan data yang dikirimkan.
3.3.2. Perancangan Minimum Sistem ATMega8535
Rangkaian sistem minimum berfungsi menjalankankan mikrokontroler ATMega8535 yang telah diprogram untuk pengendalian sistem pengawasan keamanan rumah menggunakan aplikasi video call. Mikrokontroler ATMega8535 mengolah data
input yang berasal dari ponsel user berupa pengiriman DTMF. Mikrokontroler
membutuhkan sistem minimum yang terdiri dari rangkaian eksternal, yaitu resistor pullup,
rangkaian osilator, dan rangkaian reset.
Mikrokontroler ATMega8535 sudah memiliki rangkaian osilator internal (On Chip Osilator) yang dapat digunakan sebagai sumber clock bagi CPU[8]. Sebuah kristal dan dua buah kapasitor pada pin XTAL1 dan pin XTAL2 harus ditambahkan pada minimum system
agar osilator internal dapat digunakan. Rangkaian osilator pada perancangan ini menggunakan kristal 12 MHz dan dua buah kapasitor 22 pF seperti yang ditunjukkan oleh Gambar 3.3.
Gambar 3.3. Rangkaian Oscilator ATMega8535[8]
Selain itu, Fasilitas reset yang bertujuan untuk memaksa proses kerja pada mikrokontroler diulang dari awal juga tersedia. Bila tombol reset ditekan, maka pin
RESET akan mendapat input logika rendah, sehingga mikrokontroler akan mengulang
28
proses eksekusi program dari awal. Gambar 3.4 menunjukkan rangkaian reset untuk ATMega8535.
Gambar 3.4. Rangkaian Reset ATMega8535[8]
Resistor dan kapasitor digunakan untuk memperoleh waktu pengosongan kapasitor.
Waktu pengosongan kapasitor minimum sesuai dengan datasheet yaitu sebesar 2uS[8]. Oleh karena itu, jika menggunakan kapasitor 10nF, maka nilai resistor minimum dapat dihitung dengan persamaan 3.1 sebagai berikut :
(3.1)
= 200
Ω
Nilai resistor harus lebih besar dari 200 Ω untuk memperoleh waktu pengosongan kapasitor lebih dari 2uS. Oleh karena itu, resistor yang digunakan sebesar 4700 Ω untuk memperoleh waktu pengosongan kapasitor sebesar 47uS.
Perancangan penggunaan port sebagai input dan output pada mikrokontroler ATmega8535 disesuaikan dengan kebutuhan yaitu sejumlah 5 port. DTMF decoder
dengan 4 port pada PORTA, motor servo dengan 1 port pada PORTB. Tabel 3.1
menunjukan port pada mikrokontroler yang digunakan sebagai input dan output dari motor servo dan DTMF decoder.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
Tabel 3.1. Konfigurasi Port Mikrokontroler
Fungsi Port Mikro
INPUT
DTMF decoder
PORTA.4
PORTA.5
PORTA.6
PORTA.7
OUTPUT Motor Servo PORTB.7
Secara keseluruhan perancangan antarmuka antara sistem dengan mikrokontroler yang meliputi DTMF decoder dan motor servo ditunjukkan pada Gambar 3.5.
Gambar 3.5. Rangkaian Keseluruhan Sistem
30
3.3.3. Motor Servo
Perancangan ini menggunakan 1 buah motor servo yaitu motor servo HXT5010 karena memiliki putaran derajat 00-900. Pemilihan motor servo disesuaikan dengan kebutuhan karena motor tersebut akan difungsikan untuk menggerakkan ponsel sistem.
Pengujian dan pengambilan data pada motor servo yang digunakan sebagai pergerakkan ponsel sistem bertujuan untuk mengetahui derajat putaran yang terukur dari karakterisktik motor servo tersebut. Tabel 3.2 memperlihatkan hasil pengujian dari motor servo yang digunakan. Pengujian dilakukan dengan memberi tegangan masukan pada motor servo sebesar 5V dan masukan berupa PWM sebagai sinyal pengontrol derajat
putaran motor yang berasal dari servo controller menggunakan ATMega8535.
Perbandingan nilai lebar pulsa terhadap nilai overflow motor servo selama T= 20ms adalah nilai OCR, yang merupakan cacahan pulsa selama periode 1ms dan 2ms. Perhitungan overflow interrupt sebagai pembangkit PWM untuk mengatur derajat putaran
motor servo adalah:
Frekuensi kristal = 12.000000 MHz
T = = 0,083 x 10-6
Dengan menggunakan timer0/8bit, timer overflow yang dihasilkan adalah (0,083 x 10-6 ) x 256 = 21,248 x 10-6.
Tabel 3.2. Perhitungan Derajat Putaran Motor Servo
Arah Putaran
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
Kiri (lebar pulsa 2 ms) 90° 2 10
21,248 10 94.161
Tabel 3.3. Data Pengukuran Motor Servo
Jenis Motor Servo Tegangan Input (Terukur)
Nilai OCR Derajat Putaran (Terukur)
Tabel 3.3 menunjukkan hasil pengujian motor servo merk HXT5010, derajat putaran yang terukur kurang lebih sesuai dengan data perhitungan teori.
3.4. Perancangan
Subsistem Perangkat Lunak
Perancangan perangkat lunak merupakan tahap pembuatan program yang nantinya
difungsikan untuk menjalankan sistem pengawasan keamanan rumah menggunakan aplikasi video call pada jaringan 3G GSM agar sesuai dengan tugas dan tujuannya. Diagram alir sistem terdiri dari diagram alir sistem utama (main sistem) dan sub sistem.
3.4.1. Diagram Alir
Main
Sistem
Pada perancangan perangkat lunak ini program dirancang menggunakan bahasa C pada mikrokontroler. Gambar 3.6 menunjukkan program utama proses kerja mikrokontroler secara keseluruhan. Proses awal dimulai dengan start, setalah itu program melakukan inisialisasi port-port pada mikrokontroler. Selanjutnya, user melakukan proses pemanggilan video call pada ponsel sistem. Pada proses ini, ponsel sistem akan menjawab
pemanggilan video call dari ponsel user secara otomatis. Tahap selanjutnya ialah proses konversi sinyal DTMF menjadi data biner. Proses ini dilakukan secara otomatis oleh DTMF decoder hal ini bertujuan agar mikrokontroler dapat mengenali data tersebut. Selanjutnya mikrokontroler akan menggerakkan motor servo sesuai dengan data yang dikirimkan oleh ponsel user.
32
Gambar 3.6. Flow chart main sistem
3.4.2. Diagram Alir Sub-Sistem
Diagram alir sub-sistem merupakan diagram alir berdasarkan bagian-bagian yang
terdapat pada main sistem yang meliputi pemanggilan video call ke ponsel sistem, proses konversi sinyal DTMF menjadi data biner dan pengendalian pergerakkan motor servo melalui keypad ponsel.
3.4.2.1. Diagram Alir Konversi Sinyal DTMF menjadi Data Biner oleh
DTMF Decoder
Gambar 3.7 merupakan diagram alir konversi sinyal DTMF menjadi data biner oleh DTMF decoder. Proses awal adalah melakukan inisialisasi portA, selanjutnya pengiriman
tone DTMF jalur komunikasi antara ponsel sistem dengan DTMF decoder menggunakan
handsfree yang telah dimodifikasi. Pada saat DTMF decoder menerima data yang berupa frekuensi tone ponsel, data tersebut difilter dalam blok penyaring frekuensi rendah dan
blok penyaring frekuensi tinggi yang ada dalam IC.
Apabila yang menjadi input adalah DTMF, maka secara otomatis kedua blok penyaring akan bekerja pada waktu bersamaan. Output dari kedua blok penyaring ini
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
berupa gelombang sinus. Selanjutnya, comparator akan mengubah gelombang sinus tersebut menjadi gelombang segi empat.
Gelombang segi empat diteruskan ke rangkaian pendeteksi digital yang akan
menghitung periode rata-rata dari dua gelombang segi empat yang masuk. Rangkaian ini memerlukan osilator eksternal yang dapat diperoleh dari sebuah Kristal 3,579 MHz.
Converter akan mengubah keluaran pendeteksi digital menjadi kode biner 4 bit dari 0000 hingga 1111 yang mewakili keenambelas tombol. Data biner ini dikeluarkan melalui port
Q1-Q4. Kemudian data biner tersebut dikirimkan ke mikrokontroler untuk diolah sesuai
dengan data yang dikirimkan oleh ponsel user.
Tone Output Enable (TOE) memungkinkan Q1-Q4 untuk mengeluarkan data apabila
diberi logika tinggi. Pemberian logika rendah pada TOE menyebabkan Q1-Q4 memiliki
impedansi tinggi (Z). Early Steering (Est) diperlukan untuk mengatur pewaktuan dan pengendalian sinyal yang dikodekan, dengan mendeteksi sah atau tidaknya sinyal tersebut.
Gambar 3.7. Flow chart koversi sinyal DTMF menjadi data biner oleh DTMF decoder.
3.4.2.2. Diagram Alir Pergerakan Motor Servo melalui Ponsel User
Gambar 3.8 adalah diagram alir pergerakan motor servo dengan metode DTMF.
Proses awal yang dilakukan ialah inisialisasi portB. Pada saat tone DTMF dikirimkan ke
34
ponsel sistem, DTMF decoder akan menterjemahkan data tersebut dalam bentuk data biner. Komunikasi antara ponsel sistem dengan DTMF decoder menggunakan handsfree
yang telah dimodifikasi. Saat DTMF decoder mendeteksi nada tone yang berupa
frekuensi, data tersebut dikonversi ke dalam data biner. Data yang merupakan output dari DTMF decoder dikirimkan ke mikrokontroler untuk diolah. Selanjutnya mikrokontroler akan mengolah interupsi tersebut untuk menggerakan beban/motor servo sesuai dengan data yang dikirimkan.
Dalam menggerakan motor servo, pengaturan dibuat dalam 3 kondisi yaitu jika data
output DTMF decoder bernilai 0001 dengan menekan tombol 1 pada ponsel, maka motor servo akan bergerak ke arah kanan. Apabila output DTMF decoder bernilai 0010 dengan menekan tombol 2 pada ponsel, maka motor servo bergerak ke arah tengah, dan jika output
DTMF decoder bernilai 0011 dengan menekan tombol 3 pada ponsel maka, motor servo bergerak ke arah kiri. Pergerakan motor servo ditunjukkan pada Gambar 3.8, Gambar 3.9,
dan Gambar 3.10.
Gambar 3.8. Motor servo bergerak ke arah kanan dengan nilai OCR 47.08 ( posisi 00)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
Gambar 3.9. Motor servo bergerak ke arah tengah dengan nilai OCR 70.62 ( posisi 450)
Gambar 3.10. Motor servo bergerak ke arah kiri dengan nilai OCR 94.141( posisi 900)
Perancangan pergerakan motor servo menggunakan motor servo merk HXT5010 memiliki putaran derajat 00-900. Oleh karena itu motor servo hanya dapat bergerak dari
range 00-900, sebaliknya motor servo dapat bergerak kembali dari range 900-00. Pada Gambar 3.8 menunjukkan motor bergerak ke arah kanan. Pergerakan motor servo tersebut berdasarkan input yang diterima dari tombol ponsel user. Saat kondisi tombol 1 ditekan, maka motor bergerak ke arah kanan dengan nilai OCR 47.08. Gambar 3.9 menunjukkan motor bergerak ke arah tengah (posisi netral). Pergerakan motor tersebut berdasarkan input
yang diterima dari tombol ponsel user. Saat kondisi tombol 2 ditekan, maka motor
![Gambar 2.1. Elemen Jaringan GSM[4]](https://thumb-ap.123doks.com/thumbv2/123dok/1717787.2082788/25.612.25.580.56.669/gambar-elemen-jaringan-gsm.webp)
![Gambar 2.2. Konfigurasi Pin Mikrokontroler ATMega8535[9]](https://thumb-ap.123doks.com/thumbv2/123dok/1717787.2082788/29.612.34.592.177.708/gambar-konfigurasi-pin-mikrokontroler-atmega.webp)
![Table 2.1 Hubungan PIN dan Interupsi[12]](https://thumb-ap.123doks.com/thumbv2/123dok/1717787.2082788/31.612.27.581.103.696/table-hubungan-pin-dan-interupsi.webp)
![Gambar 2.3. Mode Phase Correct PWM[10]](https://thumb-ap.123doks.com/thumbv2/123dok/1717787.2082788/32.612.31.585.81.696/gambar-mode-phase-correct-pwm.webp)
![Gambar 2.4 Mode Fast PWM[10]](https://thumb-ap.123doks.com/thumbv2/123dok/1717787.2082788/33.612.19.587.49.681/gambar-mode-fast-pwm.webp)
![Gambar 2.5. Prinsip dasar kerja PWM[15]](https://thumb-ap.123doks.com/thumbv2/123dok/1717787.2082788/34.612.21.581.80.695/gambar-prinsip-dasar-kerja-pwm.webp)
![Gambar 2.7. Konfigurasi Pin Motor Servo[16]](https://thumb-ap.123doks.com/thumbv2/123dok/1717787.2082788/35.612.27.591.170.686/gambar-konfigurasi-pin-motor-servo.webp)
![Gambar 2.9. Lebar Pulsa dan Posisi Servo[12]](https://thumb-ap.123doks.com/thumbv2/123dok/1717787.2082788/36.612.14.588.126.694/gambar-lebar-pulsa-dan-posisi-servo.webp)
