Ibnu Utomo WM adalah Dosen Fakultas Ilmu Komputer UDINUS Semarang
53
Perbandingan Pencarian Rute Optimal Pada Sistem
Navigasi Lalu Lintas Kota Semarang Dengan
Menggunakan Algoritma A* Dan Algoritma Djikstra
Ibnu Utomo WM
Ana Setyaningsih
Abstract : This research is to build an application system that provides information on alternative optimal routes on the streets of Semarang city. This study consists of five processes, namely gambar peta, data segmen, pembobotan, simpan rute, tampilan rute. First the user determines the location of the beginning and end and then inserted into the process of drawing the map then locate the intersection of the road. After obtaining the intersection of Algorithm A * (actual weight + weight heuristic), Algorithm Djiksta (actual weight). Weights are determined and then the system looking for the smallest segment with weights that generate a route. After that the route is saved and the system then displays the optimum route
Keywords : Algoritma A*, Algoritma Djikstra, Rute Optimal, GIS.
PENDAHULUAN
Berkembangnya industri dan usaha menuntut adanya pelayanan transportasi yang lebih optimal. Jasa pengantar barang atau sales yang harus mengunjungi calon client-nya harus pula diatur sedemikian rupa. Hal ini perlu karena menyangkut penggunaan resource perusahaan seperti akomodasi maupun kualitas layanan seperti ketepatan waktu layanan, sehingga pada akhirnya dapat memberikan profit bagi perusahaan.
Berkembangnya industri maupun usaha-usaha yang lainnya maka secara tidak langsung berkembang pula transportasi khususnya di kota Semarang. Dampak dari berkembangnya transportasi dapat menimbulkan kemacetan lalu lintas, tingginya tingkat kemacetan lalu lintas menyebabkan pergerakan kendaraan tidak terencana dan dapat menurunkan produktivitas, bahan bakar yang terbuang percuma, serta peningkatan polusi beserta dampak-dampaknya. Oleh karena itu diperlukan solusi yang dapat membantu pengemudi untuk pengaturan penentuan rute optimal ketujuan. Routing akan mencari jalur tercepat menuju lokasi yang akan dituju. Oleh karena itu dibutuhkan sebuah sistem yang dapat mendukung layanan routing. Kiranya GIS (Geographic Information System) sebagai sistem yang menganalisa seluruh peristiwa dipermukaan bumi bisa menjadi alternatif
54 Techno.Com, Vol. 9 No. 2, Mei 2010
solusi visualisasi routing. Routing dioptimalkan dengan Algoritma A* untuk penentuan jalur tercepat antar dua node dan akan dibandingkan dengan Algoritma Djikstra sebagai jalur terpendek.
PEMBAHASAN
Secara umum sistem yang dibangun adalah suatu sistem yang berbasis informasi geografis yang dapat membantu pencarian rute optimal dengan waktu tempuh tercepat dari kasus pencarian Algoritma A*.
Gambar 1: Perancangan Global
Perancangan Gambar 1, secara global dapat dijelaskan bahwa perancangan terdiri dari satu user dan lima proses, yaitu gambar peta, data segmen, pembobotan, simpan rute, tampilan rute. Pertama user menentukan lokasi awal dan akhir kemudian dimasukkan kedalam proses yaitu peta gambar, kemudian dicari perempatan jalan. Setelah mendapatkan perempatan tentukan data segmen, segmen yang terpilih diproses kedalam pembobotan jalan yang terdiri dari Algoritma A* (bobot actual + bobot heuristik), Algoritma Djikstra (bobot actual). Pembobotan ditentukan kemudian cari segmen dengan bobot terkecil lalu simpan rute dalam proses. Setelah rute disimpan kemudian ditampilkan rute optimal.
Context Diagram
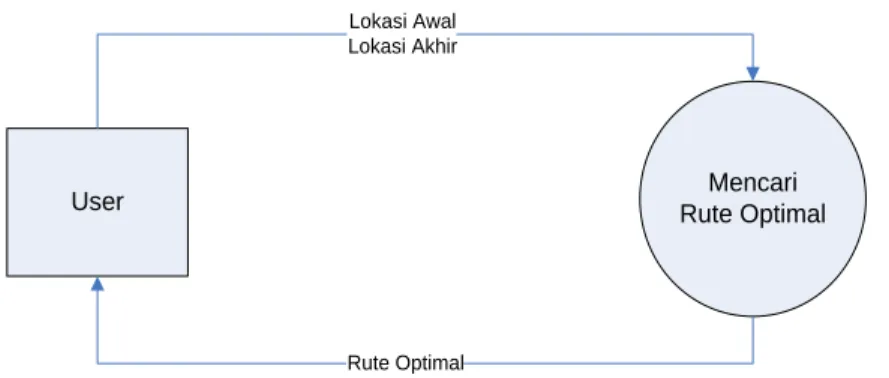
Gambar 2: Context Diagram User
Gambar Peta Data Segmen Pembobotan
Simpan Rute Tampilan Rute Lokasi Awal Lokasi Akhir Pencarian Perempatan Segmen Jalan Yang Terpilih Segmen dengan Bobot Terkecil Rute Jadi Rute Optimal Mencari Rute Optimal User Lokasi Awal Lokasi Akhir Rute Optimal
55
Perbandingan Pencarian Rute Optimal (Utomo)
Context diagram gambar 2, secara global dapat dijelaskan bahwa context diagram terdiri dari satu user dan satu proses, dengan dua input yaitu lokasi awal dan lokasi akhir yang akan menghasilkan satu output yaitu rute optimal.
Data Flow Diagram
Gambar 3: DFD Level 1
DFD level 1 gambar 3 terdiri dari tiga proses yaitu mencari persimpangan, mengaktifkan pencarian, membangun urutan rute. Proses pertama berfungsi untuk menentukan persimpangan yang sudah tersedia di peta. Proses kedua berfungsi untuk mengaktifkan Algoritma A* yang berfungsi untuk pencarian secara heuristik, dimana pencarian heuristik merupakan pencarian dengan memprediksikan jarak terpendek dengan cost yang kecil dengan mengambil garis lurus antara titik/ node yang akan dituju dengan titik asal.
Proses ketiga berfungsi untuk membangun rute dengan cara menentukan segmen jalan terpilih. 1. Mencari Persimpangan 2. Aktifkan Algoritma Pencarian 3. Membangun Urutan Rute File Histori Data Jalan Persimpangan 1. Panjang Jalan 2. Kecepatan Jalan 3. Kepadatan Jalan 4. Straight Line Segmen Jalan Terpilih User Lokasi Awal Lokasi Akhir 1. Panjang Jalan 2. Kecepatan Jalan 3. Kepadatan Jalan 4. Straight Line Rute Optimal Segmen Jalan Terpilih
56 Techno.Com, Vol. 9 No. 2, Mei 2010
Gambar 4: DFD Level 2 Proses 1
DFD level 2 proses 1 gambar 4 terdiri dari 2 proses yaitu menentukan titik persimpangan dan menentukan segmen persimpangan. Proses pertama berfungsi untuk menentukan titik persimpangan yang telah ditentukan oleh user. Proses kedua menentukan segmen persimpangan dengan cara mengambil radius untuk mencari segmen jalan yang bersinggungan dengan titik persimpangan.
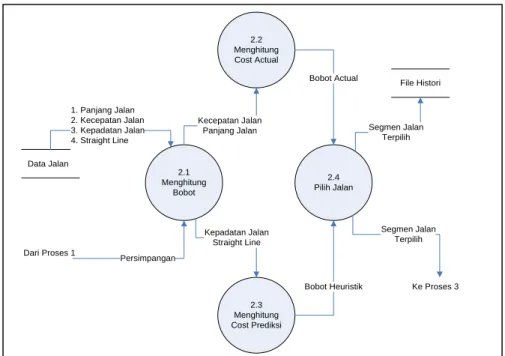
Gambar 5: DFD Level 2 Proses 2
1.1 Menentukan Titik Persimpangan 1.2 Menentukan Segmen Persimpangan Lokasi Awal Lokasi Akhir Titik Persimpangan User Persimpangan Ke Proses 2 2.2 Menghitung Cost Actual 2.1 Menghitung Bobot Data Jalan 1. Panjang Jalan 2. Kecepatan Jalan 3. Kepadatan Jalan 4. Straight Line Kecepatan Jalan Panjang Jalan 2.4 Pilih Jalan Bobot Actual File Histori Segmen Jalan Terpilih Segmen Jalan Terpilih 2.3 Menghitung Cost Prediksi Kepadatan Jalan Straight Line Bobot Heuristik Persimpangan Dari Proses 1 Ke Proses 3
57
Perbandingan Pencarian Rute Optimal (Utomo)
DFD level 2 proses 2 (gambar 5) terdiri dari 4 proses yaitu menghitung bobot, menghitung cost actual, menghitung cost prediksi, menentukan pilihan jalan. Proses pertama berfungsi untuk penginputan heuristik dimana persimpangan sudah didapatkan beserta data dari dinas perhubungan.
Proses kedua berfungsi untuk menghitung cost actual dengan cara mengambil garis lurus ketujuan kemudian ditambahkan faktor kepadatan dan panjang jalan.
Proses ketiga berfungsi untuk menghitung cost prediksi. Proses keempat yaitu menentukan pilihan jalan dengan cari jalan yang optimal dilalui kembali.
3.1 Penelusuran Jalur dari Tujuan
Keasal File Histori Histori Segmen Jalan Segmen Terpilih Dari Proses 2 3.2 Menampilkan Rute Optimal Rute Optimal User Urutan Data Segmen
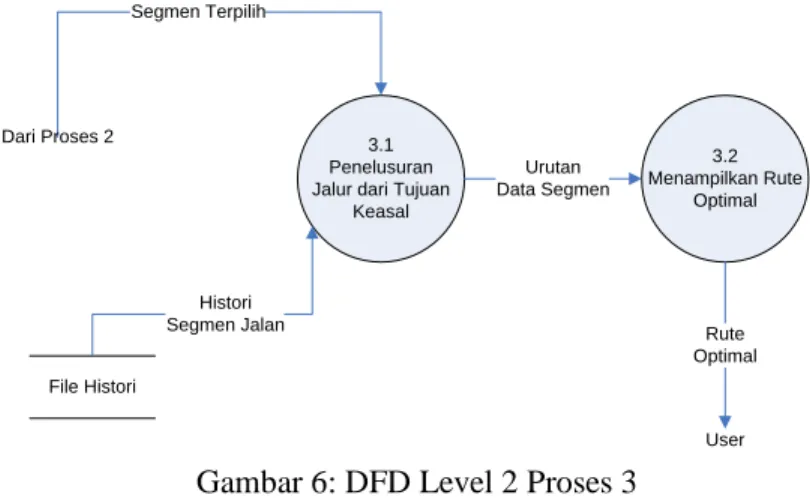
Gambar 6: DFD Level 2 Proses 3
DFD level 2 proses 3 gambar 6 terdiri dari 2 proses yaitu penelusuran jalur dari tujuan ke asal dan menentukan rute optimal. Proses pertama berfungsi untuk mencari jalan yang tercepat dadri beberapa jalan yang ditelusuri kembali dari tujuan ke asal sehingga didapat urutan segmen jalan tercepat.
58 Techno.Com, Vol. 9 No. 2, Mei 2010
Desain Menu
Gambar 7: Desain Menu
Pengujian Sistem
Skenario Pengujian
Pengujian sistem akan dilakukan dengan menggunakan Algoritma A* dan Algoritma Djikstra sebagai bahan perbandingan. Adapun Algoritma A* merupakan algoritma pencarian secara heuristik, pencarian ini dilakukan dengan memprediksikan jarak optimal dengan menggunakan bobot yang terkecil, dengan mengambil garis lurus antara titik yang akan dituju dengan titik asal.
Algoritma A* ini akan dibandingkan dengan Algoritma Djikstra, Algoritma Djikstra ini menggunakan metode pencarian secara optimal. Maksud dari optimal itu sendiri adalah pencarian jarak terpendek dengan cara mengeksplore semua node sehingga pencarian ini mengakibatkan memakan waktu yang lama. Adapun 3 skenario pengujian terdiri dari:
1. Mencari radius. Radius adalah jari-jari lingkaran yang digunakan untuk menentukan segmen mana saja yang bersimpangan dengan current segmen
2. Algoritma A* untuk menentukan rute optimal berdasarkan Algoritma A*
59
Perbandingan Pencarian Rute Optimal (Utomo)
Kecepatan kendaraan dihitung berdasarkan jarak 1 km/jam. Hal ini dikarenakan program ini mengambil solusi terburuk atas kepadatan kendaraan, karena data yang sebelumnya yang diambil dari dinas perhubungan tidak ditemukannya data real tentang kepadatan jalan kota semarang khususnya semarang tengah.
Data Pengujian
Data pengujian pada program ini menggunakan data graph sebagian Kota Semarang Tengah. Peta yang digunakan menggunakan peta 2 dimensi.
Pengujian Skenario 1
Tabel 1: Pengujian Skenario 1
no radius id jalan jumlah perempatan jumlah perempatan persentasi
(kilometer) ditemukan sebenarnya ditemukan kebenaran
1 0.001 id0001 3 1 33.3333333 id0002 5 4 80 id0003 5 5 100 id0004 4 3 75 id0005 4 4 100 id0006 4 2 50 id0007 2 2 100 id0008 2 2 100 id0009 3 3 100 id0010 4 4 100 id0011 4 4 100 id0012 4 4 100 id0013 4 4 100 rata-rata 87.5641026 2 0.002 id0001 3 1 33.3333333 id0002 4 3 75 id0003 4 4 100 id0004 4 3 75 id0005 4 4 100 id0006 5 3 60 id0007 4 4 100 id0008 4 4 100 id0009 4 4 100 id0010 3 1 33.3333333 id0011 4 4 100 id0012 4 4 100 id0013 4 4 100 rata-rata 82.8205128
60 Techno.Com, Vol. 9 No. 2, Mei 2010 3 0.003 id0001 3 3 100 id0002 6 6 100 id0003 5 5 100 id0004 4 4 100 id0005 5 5 100 id0006 5 5 100 id0007 4 4 100 id0008 4 4 100 id0009 4 4 100 id0010 4 4 100 id0011 4 4 100 id0012 4 4 100 id0013 4 4 100 rata-rata 100 4 0.004 id0001 3 3 100 id0002 6 6 100 id0003 5 5 100 id0004 4 4 100 id0005 5 5 100 id0006 5 5 100 id0007 4 4 100 id0008 4 4 100 id0009 4 4 100 id0010 4 4 100 id0011 4 4 100 id0012 4 4 100 id0013 4 4 100 rata-rata 100 5 0.005 id0001 3 3 100 id0002 6 6 100 id0003 5 5 100 id0004 4 4 100 id0005 5 5 100 id0006 5 5 100 id0007 4 4 100 id0008 4 4 100 id0009 4 4 100 id0010 4 4 100 id0011 4 4 100 id0012 4 4 100 id0013 4 4 100 rata-rata 100
61
Perbandingan Pencarian Rute Optimal (Utomo)
Dari hasil pengujian skenario pertama ini maka dapat dilihat bahwa dari 5 kali percobaan yang diambil hasil terbaik didapat pada radius 0.003, dikarenakan hasil pada saat radius 0.003 semua persimpangan dapat diketahui dengan tepat atau tingkat keberhasilan 100% dengan minimum radius.
Pengujian Skenario 2
Pengujian skenario dua ini terdiri dari 2 pengujian yaitu Algoritma A* dan Algoritma Djikstra. Pengujian ini telah diuji sebanyak tiga kali, dan diambil hasil terbaik yaitu hasil yang terbentuk jalur.
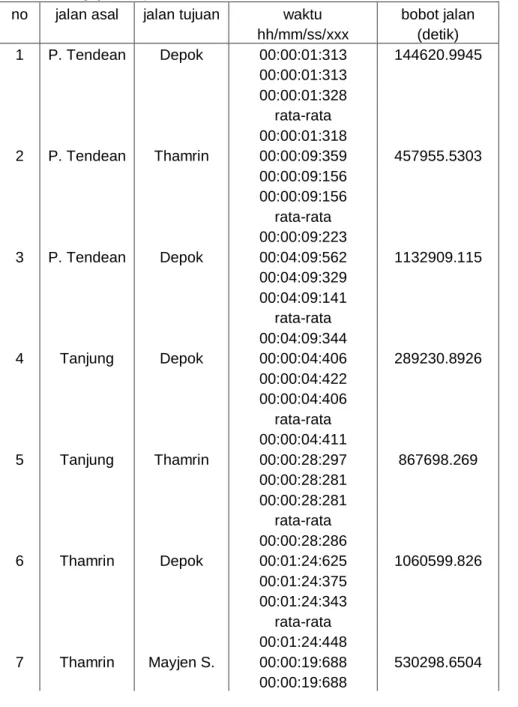
Tabel 2: Pengujian Algoritma A*
no jalan asal jalan tujuan waktu bobot jalan
hh/mm/ss/xxx (detik) 1 P. Tendean Depok 00:00:01:313 144620.9945 00:00:01:313 00:00:01:328 rata-rata 00:00:01:318 2 P. Tendean Thamrin 00:00:09:359 457955.5303 00:00:09:156 00:00:09:156 rata-rata 00:00:09:223 3 P. Tendean Depok 00:04:09:562 1132909.115 00:04:09:329 00:04:09:141 rata-rata 00:04:09:344 4 Tanjung Depok 00:00:04:406 289230.8926 00:00:04:422 00:00:04:406 rata-rata 00:00:04:411 5 Tanjung Thamrin 00:00:28:297 867698.269 00:00:28:281 00:00:28:281 rata-rata 00:00:28:286 6 Thamrin Depok 00:01:24:625 1060599.826 00:01:24:375 00:01:24:343 rata-rata 00:01:24:448 7 Thamrin Mayjen S. 00:00:19:688 530298.6504 00:00:19:688
62 Techno.Com, Vol. 9 No. 2, Mei 2010 00:00:19:688 rata-rata 00:00:19:688 8 Thamrin Sekayu 00:00:16:000 457955.5303 00:00:16:000 00:00:16:000 rata-rata 00:00:16:000 9 Sekayu Mayjen S. 00:07:02:140 1952551.944 00:07:01:450 00:07:02:135 rata-rata 00:07:01:908 10 Sekayu Ki Mangun S. 00:02:43:782 747392.5237 00:02:43:562 00:02:43:782 rata-rata 00:02:43:709
Tabel 3: Pengujian Djikstra
no jalan asal jalan tujuan waktu bobot jalan
hh/mm/ss/xxx (detik) 1 P. Tendean Depok 00:07:49:531 144620.9945 00:07:49:541 00:07:49:375 rata-rata 00:07:49:482 2 P. Tendean Thamrin 00:07:49:657 1301872.003 00:07:49:541 00:07:49:485 rata-rata 00:07:49:510 3 P. Tendean Depok 00:07:50:109 1108832.408 00:07:49:687 00:07:49:495 rata-rata 00:07:49:764 4 Tanjung Depok 00:07:49:844 289230.8926 00:07:49:875 00:07:49:865 rata-rata 00:07:49:861 5 Tanjung Thamrin 00:07:50:844 867698.269 00:07:49:875
63
Perbandingan Pencarian Rute Optimal (Utomo)
00:07:49:867 rata-rata 00:07:50:195 6 Thamrin Depok 00:07:50:000 91870.05577 00:07:49:968 00:07:49:895 rata-rata 00:07:49:946 7 Thamrin Mayjen S. 00:07:49:828 530298.6504 00:07:49:812 00:07:49:812 rata-rata 00:07:49:818 8 Thamrin Sekayu 00:07:49:875 457955.5303 00:07:49:875 00:07:49:875 rata-rata 00:07:49:875 9 Sekayu Mayjen S. 00:07:50:072 1060599.826 00:07:50:072 00:07:50:072 rata-rata 00:07:50:072 10 Sekayu Ki Mangun S. 00:07:48:781 699180.1915 00:07:49:657 00:07:49:625 rata-rata 00:07:49:354
Pengujian Algoritma A* dan Algoritma Djikstra didapat kemudian dicari pengujian selisih waktu dan selisih bobot. Adapun tabel pengujian dapat dilihat pada tabel 4.
Tabel 4: Pengujian Selisih Waktu dan Selisih Bobot Jalan
selisih waktu
(%) selisih bobot jalan (%)
99.70% 0% 52.30% -37.03% 46.90% -2.17% 99.10% 0% 93.90% 0% 82.20% -18.91% 95.80% 0%
64 Techno.Com, Vol. 9 No. 2, Mei 2010
96.50% 0%
10.20% -42.10%
73.60% -6.89%
Dari hasil pengujian skenario kedua dan ketiga ini dapat disimpulkan bahwa Algoritma A* dalam hal waktu lebih cepat dibandingkan Algoritma Djikstra.
1. Rumus mencari selisih waktu
(waktu Djikstra – waktu A*) / waktu Djikstra * 100% contoh: 469482 + 1318/469482 * 100% = 99.70% 2. Rumus mencari rata-rata selisih waktu
Jumlah keseluruhan selisih waktu / 10 kali percobaan Contoh: 750.2/10 = 75.02%
3. Rumus mencari selisih bobot jalan
(bobot Djikstra – bobot A*) / bobot Djikstra * 100%
contoh: 1301872.003 + 1784022.039 / 130872.003 * 100% = -37.03% 4. Rumus mencari rata-rata selisih bobot
Jumlah keseluruhan selisih bobot / 10 kali percobaan Contoh:-107.1/10 = -10.71%
Dari hasil percobaan bahwa Algoritma A* mempunyai kecepatan 75.02% lebih baik daripada Algoritma Djikstra dan rute yang dihasilkan rata-rata lebih jauh 10.71% dari panjang rute yang dihasilkan Algoritma Djikstra. Secara umum Algoritma A* lebih baik dibandingkan Algoritma Djikstra.
KESIMPULAN
Beberapa kesimpulan yang bisa didapatkan antara lain :
1. Algoritma A* mempunyai kecepatan 75.02% lebih baik daripada Algoritma Djikstra
2. Rute yang dihasilkan rata-rata jauh 10.71% dari panjang rute yang dihasilkan Algoritma Djikstra 3. Secara umum Algoritma A* lebih baik dibandingkan Algoritma Djikstra
4. Parameter panjang jalan, kecepatan maksimum, tingkat kepadatan jalan dan perkiraan jarak tempuh ketitik tujuan dengan penghitungan straight line dapat digunakan sebagai parameter pembobotan kepadatan jalan. 5. Parameter pembobotan kepadatan jalan dapat digunakan sebagai bobot heuristik pada alternatif solusi rute
65
Perbandingan Pencarian Rute Optimal (Utomo)
DAFTAR PUSTAKA
1. Arita Witanti. (2005). Pencarian Rute Untuk ATSP Berdasarkan Algoritma A* dan ANT Coloni. STT Telkom.
2. Eddy Prahasta. (2005). Sistem Informasi Geografis Map Info: Aplikasi pengembangan MAP INFO dengan Menggunakan Borland Delphi, Ms. Visual Basic dan Map Basic. Bandung: Informatika.
3. Ir. Inge Martina (2003). 36 Jam Belajar Komputer Delphi 8.0. Jakarta: Gramedia. 4. Lester Patrick. (2005). A* Pathfinding To Beginners.
5. M. Zuliansyah. (2003). Penentuan Rute Dengan Pencarian Cerdas Pada Sistem Navigasi Lalu Lintas. 6. Robert Setiadi. (2008). Algoritma Itu Mudah. Jakarta: Gramedia.