BAB II
TINJAUAN PUSTAKA
2.1 Umum
Motor induksi merupakan motor AC yang paling luas digunakan dan dapat
dijumpai dalam setiap penggunaannya pada industri-industri, pembangkit listrik,
ataupun dalam rumah tangga. Motor induksi bekerja dengan adanya perbedaan
antara medan putar distator dan dirotor atau yang disebut slip. Motor induksi
memiliki kelebihan tertentu yaitu kontruksinya yang kuat, sederhana, handal, serta
berbiaya murah. Disamping itu motor induksi juga memiliki efisiensi yang tinggi
saat berbeban penuh dan tidak membutuhkan perawatan yang banyak. Jika
dibandingkan dengan motor arus searah (dc), motor induksi ini masih memiliki
beberapa kekurangan khususnya dalam hal pengaturan kecepatan. Dimana pada
motor induksi pengaturan kecepatannya masih sukar dilakukan,sementara pada
motor DC hal ini sangat jarang ditemukan [1].
Jika dilihat dari penggunaan sekarang ini motor induksi sangat berperan
penting dalam industri,khususnya motor induksi 3 fasa banyak dijumpai di
perusahaan atau pabrik yang digunakan sebagai sumber penggerak peralatan yang
digunakan. Hal ini dikarenakan motor induksi memiliki keuntungan tersendiri.
Keuntungan dari motor induksi ini antara lain[4]:
1. Bentuknya sederhana, konstruksinya cukup kuat,
2. Biayanya murah dan dapat diandalkan,
3. Efisiensinya tinggi,
5. Pada waktu mulai beroperasi tidak memerlukan tambahan peralatan
khusus.
Meskipun mesin induksi paling banyak dipergunakan sebagai motor, tetapi
jarang dipergunakan sebagai generator, karakteristik penampilannya sebagai
generator tidak memuaskan pada kebanyakan pemakaiannya disebabkan
diperlukannya pengaturan daya reaktifnya[5].
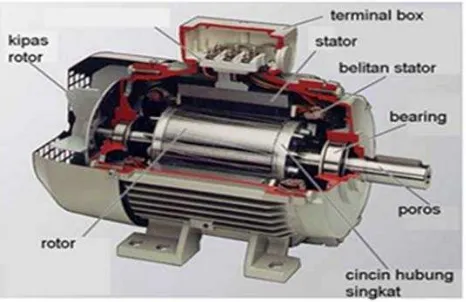
2.2 Konstruksi Motor Induksi
Motor induksi pada dasarnya memiliki konstruksi yang sama dengan motor
sinkronyaitu memiliki stator dan memiliki perbedaan dalam hal konstruksi
rotornya. Stator dibentuk dari laminasi-laminasi tipis yang terbuat dari aluminium
ataupun dari besi tuang dan kemudian dipasang bersama-sama sehingga
membentuk inti stator dengan slot. Kemudian bagian yang berputar disebut
dengan rotor, rotor ini terletak dibagian dalam dari motor induksi tepatnya
dibagian dalam dari stator. Untuk lebih jelasnya konstrusi dari motor induksi
dapat ditunjukkan oleh Gambar 2.1 berikut:
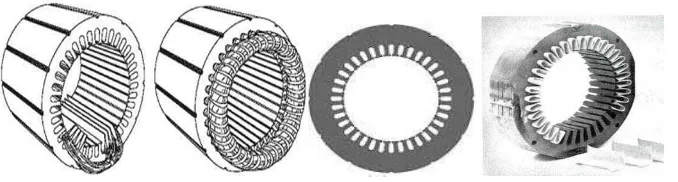
2.2.1 Stator
Stator adalah bagian terluar dari motor yang merupakan bagian yang diam
dan tempat mengalirkan arus fasa (Gambar 2.2(a)). Stator terdiri atas tumpukan
laminasi inti yang memiliki alur yang menjadi tempat kumparan dililitkan yang
berbentuk silindris. Tiap elemen laminasi inti dibentuk dari lembaran
besi(Gambar 2.2(b)). Alur pada tumpukan laminasi inti diisolasi dengan kertas
(Gambar 2.2(c)). Tiap lembaran besi tersebut memiliki beberapa alur dan
beberapa lubang pengikat untuk menyatukan inti. Tiap kumparan tersebar dalam
alur yang disebut belitan fasa yang terpisah secara listrik sebesar 1200. Kawat
kumparan yang digunakan terbuat dari tembaga yang dilapisi dengan isolasi tipis.
Kemudian tumpukan inti dan belitan stator diletakkan dalam cangkang silindris
(Gambar 2.2(c)). Berikut ini contoh lempengan laminasi inti, lempengan inti yang
disatukan, belitan stator yang telah dilekatkan pada cangkang luar untuk motor
induksi 3 fasa. Berikut konstruksi stator dan laminasi-laminasi stator ditunjukkan
pada Gambar 2.2 berikut:
a.Stator dan tumpukan laminasi b. Lempengan inti stator c. Tumpukan inti dan
kertas isolasi
2.2.2 Rotor
Rotor merupakan bagian dari mesin induksi yang berputar dan terletak di
dalam motor induksi. Rotor dari motor induksi terdiri dari 2 bagian yaitu rotor
sangkar (squirrel cage rotor)dan rotor belitan (wound rotor)[6].
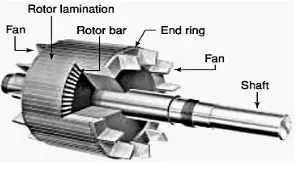
Pada rotor sangkar terdiri dari susunan batang konduktor yang
dibentangkan ke dalam slot-slot yang terdapat pada permukaan rotor dan tiap-tiap
ujungnya dihubung singkat dengan menggunakan cincin aluminium. Batang rotor
dan cincin ujung sangkar tupai yang kecil merupakan hasil cetakan tembaga atau
aluminium dalam satu lempeng pada inti rotor, maka batang rotor ini kelihatan
seperti kandang tupai sehingga disebut motor induksi rotor sangkar tupai.
Berikut gambar rotor sangkar tupai yang ditunjukan oleh Gambar 2.3:
Gambar 2.3 Rotor sangkar tupai
Berbeda dengan rotor belitan (wound rotor), rotor dililit dengan lilitan
terisolasi dengan lilitan stator. Lilitan fasa rotor dihubungkan dengan hubungan
wyedan masing-masing ujung fasa terbuka dikeluarkan ke cincin slip yang
terpasang pada poros rotor. Slot rotor menampung belitan terisolasi yang mirip
dengan belitan pada stator. Dalam hal ini, sikat karbon menekan cincin slip, oleh
karena itu tahanan eksternal dapat dihubungkan seri ke belitan rotor untuk
mengontrol torsi start dan kecepatan selama pengasutan. Penambahan tahanan
eksternal pada rangkaian rotor belitan mengahasilkan torsi yang lebih besar
Konstruksi motor induksi 3 fasa dengan rotor belitan dapat ditunjukkan
Gambar 2.4 berikut [6]:
Gambar 2.4 Konstruksi rotor belitan
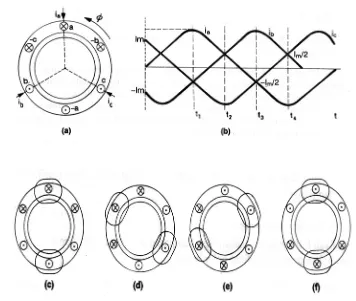
2.3 Medan Putar
Adanya putaran dalam motor induksi 3 fasa terjadi akibat adanya medan
putar (fluks yang berputar) yang memotong rotor. Medan putar ini terjadi apabila
kumparan stator dihubungkan dengan suplai fasa banyak, umumnya tiga fasa [6].
Pada saat terminal tiga fasa motor induksi dihubungkan dengan suplai tiga
fasa maka arus bolak-balik tiga fasa ia, ib, ic,yang terpisah sebesar 1200 satu sama
lain akan mengalir pada kumparan stator. Arus-arus ini akan menghasilkan gaya
gerak magnet yang kemudian menghasilkan fluks yang berputar atau disebut juga
medan putar. Untuk melihat bagaimana medan putar dihasilkan, dapat diambil
contoh sebuah motor induksi tiga fasa yang dihubungkan dengan sumber tiga fasa
sehingga pada stator mengalir arus tiga fasa yang kemudian menghasilkan medan
Gambar 2.5 Medan putar motor induksi 3 fasa, dan arus 3 fasa seimbang
Pada t1 fluks resultan mempunyai arah yang sama dengan arah fluks yang
dihasilkan ole kumparan a-a, pada t2 fluks resultannya dihasilkan oleh kumparan
b-b. Untuk t4, fluks resultannya berlawanan arah dengan fluks resultan yang
dihasilkan pada saat t1 [6].
Arah putaran rotor motor induksi searah dengan putaran medan putar stator,
namun kecepatan putaran rotor lebih rendah daripada kecepatan sinkronnya.
Perbedaan dari kecepatan putar ini disebut dengan slip motor induksi.
2.4 Slip
Perbedaan antara kecepatan sinkron dengan keceptan rotor disebut slip [4].
Motor induksi tidak dapat berputar pada kecepatan sinkron. Jika hal ini terjadi
maka rotor tidak akan berputar relatif terhadap fluksi yang berputar. Maka tidak
ada arus yang mengalir pada rotor dan tidak akan menghasilkan torsi. Apabila
rotor motor induksi berputar dengan kecepatan nr dan kecepatan medan putar
stator adalah ns maka slip (s) adalah[1]:
�= ns−nr
ns x100% (2.1)
Dimana : ns= kecepatan medan putar distator (Rpm)
nr = kecepatan rotor (Rpm)
Persamaan (2.1) memberikan informasi yaitu:
1. Saat s = 1 dimana nr = 0, ini berarti rotor masih dalam keadaan diam atau
akan berputar.
2. s = 0 menyatakan bahwa ns = nr, ini berarti rotor berputar sampai
kecepatan sinkron. Hal ini dapat terjadi jika arus dc yang diinjeksikan ke
belitan rotor, atau rotor digerakkan secara mekanik.
3. 0 < s < 1, ini berarti kecepatan rotor diantara keadaan diam dengan
kecepatan sinkron. Kecepatan rotor dalam keadaan inilah dikatakan
kecepatan tidak sinkron. Biasanya slip untuk mendapatkan efisiensi yang
tinggi pada saat beban penuh adalah 0,04.
2.5 Prinsip Kerja Motor Induksi Tiga Fasa
Motor induksi adalah peralatan pengubah energi listrik keenergi mekanik.
Listrik yang diubah merupakan listrik tiga phasa. Arus pada rotor didapat dari
arus induksi dimana arus ini berada dalam medan magnetik sehingga akan terjadi
gaya (F) pada rotor yang akan menggerakkan rotor dalam arah tegak lurus medan.
Untuk memperjelas prinsip kerja motor induksi tiga fasa adalah sebagai berikut
1. Apabila sumber tegangan 3 fasa dihubungkan kekumparan stator maka
kumparan stator akan mengalirkan arus 3 fasa.
2. Arus 3 fasa tersebut akan menghasilkan fluksi bolak-balik yang
berubah – ubah.
3. Interaksi ketiga fluksi bolak-balik tersebut akan menghasilkan medan
putar yang berputar dengan kecepatan sinkron ns dimana:
Ns = 120�
� (2.2)
4. Fluksi yang berputar tersebut akan memotong batang konduktor pada
rotor, akibatnya pada kumparan rotor akan timbul tegangan induksi
(ggl) sebesar E2 yakni:
5. Karena kumparan rotor merupakan rangkaian tertutup, maka ggl akan
menghasilkan arus I2.
6. Adanya arus I2 didalam medan magnet menimbulkan gaya F pada
rotor.
7. Bila torsi awal yang dihasilkan oleh gaya F pada rotor cukup besar
untuk memikul torsi beban, rotor akan berputar searah dengan medan
putar stator.
8. Perputaran rotor akan semakin meningkat hingga mendekati kecepatan
medan putar stator (ns) dengan kecepatan putar rotor (nr). Perbedaan
kecepatan antara ns dan nr disebut dengan slip.
9. Pada saat rotor dalam keadaan berputar, besarnya tegangan yang
terinduksi pada kumparan rotor tergantung dari besarnya slip.
Tegangan ini dinyatakan E2s yaitu
E2S = 4,44fN2Фm (Volt) (2.4)
Dimana:
E2S = Tegangan induksi pada saat rotor berputar (Volt)
N2 = Jumlah lilitan kumparan rotor
f = frekuensi rotor yang berputar (Hertz)
10.Bila nr = ns, tegangan tidak akan terinduksi dan arus tidak akan
mengalir pada kumparan jangkar rotor, dengan demikian tidak
dihasilkan torsi. Torsi motor akan timbul apabila nr< ns,dan apabila nr
> ns maka motor induksi beroperasi sebagai generator induksi yang
menghasilkan energi listrik.
2.6 Rangkaian Ekivalen Motor Induksi
Pada prinsipnya, proses dalam motor induksi identik dengan sebuah
transformator, dengan demikian rangkaian ekivalen motor induksi sama dengan
rangkaian ekivalen transformator. Perbedaan yang ada hanyalah karena pada
kenyataan bahwa kumparan rotor (kumparan sekunder pada transformator) dari
motor induksi berputar, yang mana berfungsi untuk menghasilkan daya mekanik.
Awal dari rangkaian ekivalen motor induksi dihasilkan dengan cara yang sama
Rangkaian ekivalen motor induksi untuk masing-masing sisi dapat
diperlihatkan sebagai berikut:
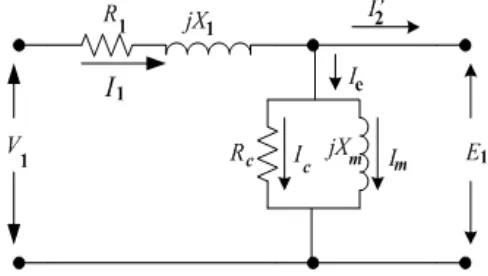
2.6.1 Rangkaian Stator Motor Induksi
Fluks pada celah udara yang berputar menghasilkan ggl induksi lawan pada
setiap fasa dari stator. Sehingga tegangan terminal V1 menjadi ggl induksi lawan
dari E1 dan jatuh tegangan pada impedansi bocor stator. Sehingga diperoleh
persamaan tegangan pada stator adalah[5]:
V1 = E1 + I1 ( R1 + X1) (Volt) (2.5)
Dimana:
V1 = Tegangan nominal stator (Volt)
E1 = Ggl lawan yang dihasilkan oleh fluks celah udara (Volt)
I1 = Arus stator ( Ampere)
R1 = Resistansi stator (Ohm)
X1 = Reaktansi bocor stator (Ohm)
Sama seperti halnya trafo, maka arus stator (I1) terdiri dari dua buah
komponen. Salah satunya adalah komponen beban (I2). Dan komponen yang
lainnya adalah arus eksitasi Ic (excitting current). Dan arus eksitasi ini dapat
dibagi menjadi dua bagian yaitu, komponen rugi-rugi inti Ic yang sefasa dengan
E1 dan komponen magnetisasi Im yang tertinggal 900 dengan E1. Arus Ic akan
menghasilkan rugi-rugi inti dan arus Im akan menghasilkan resultan fluks celah
udara. Pada trafo arus eksitasi disebut juga arus beban nol, akan tetapi dalam
motor induksi 3 fasa tidak, hal ini disebabkan pada motor induksi arus beban nol
+ rugi gesek angin + rugi I2R dalam jumlah kecil ) sedangkan pada trafo fungsi
eksitasi untuk menghasilkan fluksi dan menghasilkan rugi-rugi inti.
Rangkaian ekivalen dari stator ini dapat ditunjukkan oleh Gambar 2.6 berikut:
Gambar 2.6Rangkaian ekivalen stator motor induksi
2.6.2 Rangkaian Rotor Motor Induksi
Pada saat motor start dan rotor belum berputar, maka stator dan rotor
memiliki frekuensi yang sama. Tegangan induksi pada rotor dalam kondisi ini
dilambangkan dengan E2. Pada saat rotor sudah berputar, maka besarnya tegangan
induksi pada rotor sudah dipengaruhi slip. Besarnya tegangan induksi pada rotor
pada saat berputar untuk berbagai slip sesuai dengan persamaan berikut[5].
E2S = s E2 (2.6)
Dimana:
E2 = Tegangan Induksi pada rotor pada saat diam (Volt)
E2S = Tegangan induksi pada rotor saat berputar ( Volt)
Tegangan induksi pada saat motor berputar akan mempengaruhi tahanan
dan reaktansi pada rotor. Tahanan pada rotor adalah konstan, dan tidak
dipengaruhi oleh slip. Reaktansi dari motor induksi tergantung pada induktansi
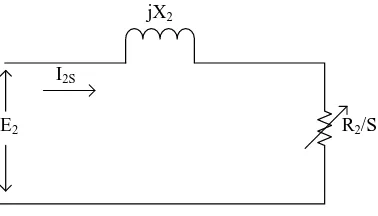
Pada saat diberikan beban atau dipengaruhi slip, maka besarnya arus yang
mengalir pada rotor adalah:
I2S = E2
R2/s+JX 2 (Ampere) (2.7)
Maka rangkaian ekivalen rotor yang dipengaruhi slip adalah seperti pada Gambar
2.7 berikut :
R2/S
I2S
E2
jX2
Gambar 2.7Rangkaian ekivalen rotor motor induksi yang sudah dipengaruhi slip.
Impedansi ekivalen rotor motor induksi pada Gambar 2.7 adalah[5]:
Z2S = R2
S + JX2 (Ohm) (2.8)
Padamotorinduksirotorbelitan,makarotorpadamotorinduksidapatdigantideng
an rangkaian ekivalen rotoryangmemilikibelitan denganjumlah
fasadanbelitanyang samadenganstatorakan tetapi
gayagerakmagnetdanfluksiyangdihasilkan
harussamadenganrotorsebenarnya,makaperformansi rotoryangdilihatdari sisi
primertidakakanmengalamiperubahan.
Sehinggahubunganantarateganganyangdiinduksikanpadarotoryangsebenarny
a (Erotor) dan tegangan yang diinduksikan pada rangkaian ekivalen rotor (E2S)
adalah[5]:
Dimana:
a adalah perbandingan belitan stator dengan belitan rotor sebenarnya.
Sedangkan hubungan antara arus rotor sebenarnya (IRotor) dengan arus I2S
pada rangkaian ekivalen haruslah[2]:
I2S = I rotor
a (2.10)
Rotor dari motor induksi adalah terhubung singkat, sehingga impedansi
yang diinduksikan tegangan dapat disederhanakan dengan impedansi rotor hubung
singkat. Sehingga hubungan anatara impedansi bocor, slip dan frekuensi dari
rangkaian ekivalen rotor (Z2S) dengan impedansi bocor, slip dan frekuensi rotor
sebenarnya (ZRotor) adalah[5]:
Z2S =
Dengan mengingat kembali impedansi dari rangkaian ekivalen rotor yang
sudah dipengaruhi oleh slip seperti Persamaan (2.8) maka besarnya arus
impedansi bocor slip frekuensi dari rangkaian ekivalen rotor[5]:
Z2S = E2s
I2s =R2 + JsX2 (2.12)
Dimana:
R2 = Tahanan rotor (Ohm)
sX = Reaktansi rotor yang sudah berputar (Ohm)
Z2S = Impedansi slip bocor frekuensi dari rangkaian ekivalen rotor (Ohm)
Pada stator dihasilkan medan putar yang berputar dengan kecepatan sinkron.
Medan putar ini akan menginduksikan ggl induksi pada rangkaian rotor (E2S) dan
menginduksikan ggl lawan pada stator sebesar E2. Bila bukan karena efek
kecepatan, maka tegangan yang diinduksikan pada rangkaian ekivalen rotor (E2S)
ekivalen rotor memiliki jumlah belitan yang sama dengan rangkaian ekivalen
stator. Akan tetapi dengan kecepatan relative medan putar yang direferensikan
pada sisi rotor adalah s kali kecepatan medan putar yang direfensikan pada sisi
stator, maka hubungan kedua ggl adalah [5]:
E2S = s E1 (2.13)
Karena resultan fluks celah udara ditentukan oleh fasor penjumlahan dari arus stator
dan arus rotor baik itu arus dari rotor sebenarnya maupun arus dari rangkaian ekivalen
rotor, maka dalam hal ini dikarenakan jumlah belitan stator dan rangkaian ekivalen
rotor adalah sama maka hubungan arus yang mengalir pada stator dan rotor adalah [5]:
I2S = I2 (2.14)
Apabila Persamaan (2.13) dibagi dengan Persamaan (2.14) maka diperoleh [5]:
E2s I2s =
sE 2
I2 (2.15)
Dengan mensubtitusikan Persamaan (2.15) kePersamaan (2.12) maka diperoleh [5]:
E2s I2s =
sE 1
I1 = R2 + JsX2 (2.16)
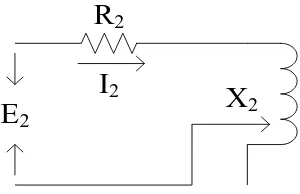
Dengan membagi Persamaan (2.16) berikut dengan s maka diperoleh[5]:
E1 I2 =
R2
S + JX2 (2.17)
Sehingga dari persamaan-persamaan yang sudah dijabarkan diatas diperoleh
suatu rangkaian umum dari rangkaian ekivalen rotor seperti yang ditunjukkan oleh
X
2R
2I
2E
2Gambar 2.8Rangkaian ekivalen rotor motor induksi.
Dari penjelasan diatas maka dapat dibuat rangkaian ekivalen perfasa motor
induksi. Gambar 2.9 berikutmenunjukkan gambar rangkaian ekivalen perfasa
motor induksi [6]:
Gambar 2.9Rangkaian ekivalen motor induksi
2.7 Efisiensi Motor Induksi
Efisiensimotorinduksi adalah ukuran keefektifanmotorinduksi
untukmengubah energilistrikmenjadienergimekanikyang dinyatakan
sebagaiperbandingan antara masukan dan keluaranataudalambentuk
energilistrikberupaperbandingan Watt keluarandanWattmasukan.
Daya keluaran motor induksi adalah daya mekanis yang dihasilkan motor
Pout= T.ω (2.18)
Dengan, T = torsi motor (Nm)
ω = Kecepatan putaran (rad/s)
DefinisiNEMA terhadapefisiensienergiadalahbahwa efisiensi merupakan
perbandingan atau rasio dari daya keluaran yang berguna terhadapdayamasukan
total danbiasanyadinyatakan dalampersen. Efisiensi jugasering
dinyatakandengan perbandinganantaradaya keluarandengan daya keluaran
ditambah rugi - rugi,yangdirumuskandalamPersamaan (2.19)berikut[7]:
Ƞ=Pout
rugipadapersamaantersebutadalahpenjumlahankeseluruhankomponenrugi – rugi
yang dibahas sebelumnya. Pada motor induksi pengukuran efisiensi motor induksi
sering dilakukan dengan beberapa cara seperti:
1. Mengukur langsung daya listrik masukan dan daya mekanik keluaran
2. Mengukur langsung seluruh rugi-rugi dan daya masukan
3. Mengukur setiap komponen rugi-rugi dan daya masukan
Dimana pengukuran daya masukan tetap membutuhkan ketiga cara
diatas.Umumnya,daya listrik dapat diukur dengan sangat tepat, keberadaan daya
mekanik lebih sulit untuk diukur. Saat ini lebih dimungkinkan untuk mengukur
torsi dan kecepatan dengan akurat yang bertujuan untuk mengetahui harga
efisiensi yang tepat. Pengukuran kepada keseluruhan rugi-rugi ada yang
berdasarkan kalometri. Walupun pengukran dengan metode ini sangat sulit
didapat dengan pengukuran langsung pada daya keluaran.
Kebanyakan pabrik menggunakan pengukuran komponen rugi-rugi secara
individual, karena dalam teorinya metode ini tidak memerlukan pembebanan pada
motor dan ini adalah suatu keuntungan pada suatu pabrikan. Keuntungan lainnya
yang sering dibicarakan adalah bahwa benar error pada komponen rugi-rugi tidak
mempengaruhi keseluran efisiensi. Keuntungannya terutama adalah fakta ada
kemungkinan koreksi untuk temperatur lingkungan yang berbeda. Biasanya data
efisiensi yang disediakan oleh pembuat diukur atau dihitung berdasarkan data
tertentu.
2.8 Torsi Motor Induksi
Suatu persamaan torsi dari motor induksi dapat dihasilkan dan dijelaskan
dengan rangkaian Thevenin. Dalam bentuk umumnya, teori thevenin mengizinkan
pergantian sembarang yang terdiri dari unsur-unsur rangkaian linear dan sumber
tegangan tetap [5].
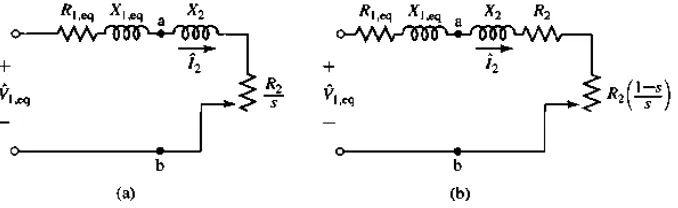
Rangkaian thevenin diasumsikan dengan Gambar 2.10[5] berikut, dimana
sumber tegangan V1eqterhubung seri dengan impedansi Z1eq = R1eq + Jx1eq
Gambar 2.10Rangkaian Ekivalen Thevenin motor induksi
Dari Gambar 2.10(a) besar tegangan Thevenin (V1eq) dan impedansi thevenin
V1eq = V1(
Dari Gambar 2.10(b) nilai I2dapat dihitung dengan Persamaan (2.22) berikut:
I2 =
V1eq
Z1eq +jX 2+(R2/s) (2.22)
Torsi mekanik pada motor induksi dapat dihitung dengan persamaan berikut:
(2.23)
Dimana:
(2.24)
Torsi motor juga dapat diperoleh dengan meggunakan timbangan torsi, yaitu
dengan menggunakan Persamaan 2.25 berikut:
T(Nm) = m .g.l
1000 (2.25)
Dengan: m = massa (gr)
g = gravitasi (10 ms-2)
l = lengan torsi (0.5 m)
2.9 Metode-metode starting motor induksi 3 fasa
Motor induksi tiga fasa tidak mengalami masalah pengasutan/starting
seperti pada motor sinkron. Motor induksi dapat diasutlangsung dengan
menghubungkan langsung dengan sumber tegangan.Untuk motor induksi rotor
belitan, pengasutan dapat dilakukan pada arus yang relatif kecil dengan
menambahkan tahanan pada belitan rotor melalui cincin slip. Penambahan
memperkecil arus start. Untuk motor induksi tipe rotor sangkar, pengasutan
motor induksi dapat dilakukan dengan banyak cara tergantung pada daya nominal
motor dan tahanan efektif rotor saat motor distart. Ada beberapa metode starting
motor induksi tiga fasa antara lain [1]:
1. Starting langsung (Direct online starting)
2. Starting wye-delta
3. Starting dengan autotransformator
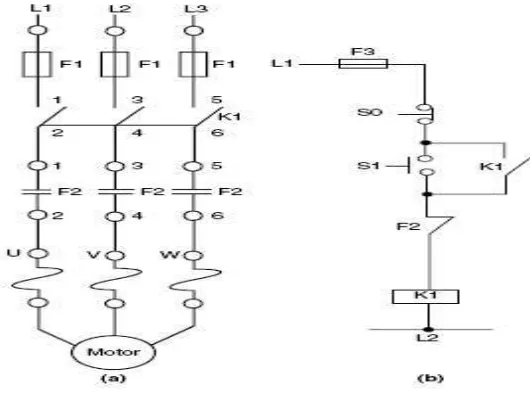
2.9.1 Starting Langsung (Direct online starting)
Starting langsung (Direct Online Starting)merupakan cara paling
sederhana, dimana stator langsung dihubungkan langsung dengan sumber
tegangan, artinya tidak perlu mengatur atau menurunkan tegangan pada saat
starting. Penggunaan metode ini sering dilakukan untuk motor-motor AC yang
mempunyai kapasitas daya yang kecil[1]. Untuk memperjelas mengenai metode
starting secara langsung perhatikan Gambar 2.11 berikut [8]:
Gambar 2.11(a) Diagram skematik startinglangsung (b) Diagram kontrol starting
Keterangan:
Metode starting wye-delta dipergunakan untuk motor induksi rotor sangkar
yang dirancang untuk memberikan keluaran nominal bila kumparan stator
dihubungkan delta dan biasanya dipakai pada motor yang mempunyai keluaran
nominal sampai 25HP. Belitan stator dirancang beroperasi pada hubungan delta
dan pada saat starting belitan tersebut terhubung dengan hubungan bintang/wye.
Mula-mula motor distart pada hubungan bintang, ketika kecepatan motor
meningkat maka hubungan pada motor tersebut berganti dari hubungan bintang
ke hubungan delta.
Pada starting hubungan delta [8]:
Arus start per phasa, Isc = V
Zsc (Ampere) (2.26)
Arus starting = √3Isc(Ampere) (2.27)
Pada starting hubungan wye [8]:
Arus start per phasa, Isc = � /√3
��� (Ampere) (2.28)
Arus starting = 1
√3Isc (Ampere) (2.29)
Untuk memperjelas mengenai starting wye-delta, perhatikan diagram skematik
Gambar 2.12 (a) Diagramdaya starting Y-∆. (b) Diagram kontrol Y-∆.
2.9.3 Starting Autotransformator
Metode starting dengan autotransformator adalah suatu metode starting
yang digunakan untuk mengurangi tegangan pada stator pada saat start, yang
akan membatasi arus start.
Starting dengan autotransformator digunakan untuk mengurangi tegangan
pada saat start. Dengan berkurangnya tegangan pada saat start, maka arus start
yang dihasilkan akan rendah juga. Setelah waktu tunda ditetapkan,
autotransformator dilepas dari rangkaian dan selanjutnya motor induksi rotor
sangkar akan beroperasi pada tegangan penuh. Autotransformator dilengkapi
dengan tap yang terdiri dari 50%, 65% atau 80% dari tegangan saluran sebagai
tegangan start dengan pengurangan arus yang sesuai. Tap dapat dipilih agar
sesuai dengan kopel start yang diperlukan oleh motor untuk dapat mengatasi
beban yang dipikul oleh motor. Pengasutan autotransformator dapat dioperasikan
Diagram skematik fasa dan diagram kontrol pada starting autotransformer
ditunjukan oleh Gambar 2.13 [8] berikut:
Gambar 2.13 (a) Diagram startingautotransformator (b) Diagramkontrol
starting autotransformator
2.10 Tegangan tidak seimbang
Ketika sumber tegangan yang disuplai pada motor induksi 3 fasa tidak
merata, maka akan dihasilkan arus tidak seimbang pada kumparan stator.
Tegangan tidak seimbang dalam persentase yang kecil akan menghasilkan arus
tidak seimbang dalam jumlah besar. Jika sumber tegangan tidak seimbang, maka
nilai daya pada motor induksi 3 fasa rotor sangkar tupai harus dikali dengan faktor
pengali seperti yang ditunjukan pada Gambar 2.14 untuk kemungkinan
pengurangan beban pada motor. Mengoperasikan motor dengan
Hubungan faktor derating motor induksi dengan tingkat ketidakseimbangan
tegangan dalam persen ditunjukan oleh Gambar 2.14 [7] berikut:
Gambar 2.14 Kurva penurunan rating motor induksi 3 fasa.
Berdasarkan gambar kurva penurunan rating motor induksi 3 fasa terhadap
suplai tegangan tidak seimbang, jika terjadi ketidakseimbangan tegangan sebesar
1% maka tidak ada masalah, jika ketidakseimbangan tegangan sebesar 2% maka
terjadi penurunan rating motor sebesar 0,96. Demikian seterusnya tergantung pada
persentase ketidakseimbangan tegangan hingga mencapai penurunan rating
sebesar 0,76 pada ketidakseimbangan tegangan 5% [9].
Ada banyak kondisi ketidakseimbangan tegangan yang terjadi dengan VUF
(Voltage Unbalanced Factor) yang sama, salah satunya adalah Single Phase
Under Voltage Unbalance. Dimana pada kondisi tersebut salah satu fasa dari
sistem tiga fasa bertegangan lebih rendah dibandingkan dengan tegangan
nominalnya [10].
Tegangan tidak seimbang dalam persen didefinisikan berdasarkan
Persamaan 2.30 berikut [7][9]:
V��(%) =Selisih tegangan maksimum dari tegangan rata−rata
Sebagai contoh, jika tegangan tidak seimbang yang menyuplai motor
induksi 3 fasa adalah Vab= 450 V, Vbc= 363,6 V, Vca= 405 V [7][9]. Maka
tegangan rata-rata yang masuk ke motor adalah 406,2 V dan selisih tegangan
maksimum dari tegangan rata-rata adalah 43,8 V. Berdasarkan Persamaan 2.30
akan diperoleh besar persentase ketidakseimbangan tegangan yang menyuplai
motor. Yaitu:
% ���������������� = 43.8
406.2� 100 = 10.78 %
Penyebab tegangan tidak seimbang termasuk impedansi saluran transmisi
dan saluran distribusi yang tidak sama, distribusi beban-beban satu fasa yang tidak
merata dalam jumlah besar, dan lain-lain. Ketika beban tiga fasa seimbang
dihubungkan dengan sistem suplai yang tidak seimbang, maka arus yang dialirkan
ke beban juga tidak seimbang. Oleh karena itu sangat sulit atau tidak mungkin
untuk menyediakan suatu sistem suplai tegangan seimbang yang sempurna kepada
konsumen, sehingga perlu dilakukan berbagai upaya untuk meminimalisasikan
pengaruh ketidakseimbangan tegangan dan mengurangi pengaruhnya pada beban–
![Gambar 2.4 berikut [6]:](https://thumb-ap.123doks.com/thumbv2/123dok/2284131.1239233/5.595.218.410.143.241/gambar-berikut.webp)