The Research and Design of Industrial Robot Introduced into
Pint-sized Robot Teaching
Zhao Dan
1and Kang Yingjian
21
Department of Electrical Technology, College of Automation Engineering
Beijing Polytechnic, Beijing 100176, P.R. China
2
Department of Computer Technology, College of Telecommunications Engineering
Beijing Polytechnic, Beijing 100176, P.R. China
[email protected], [email protected]
Abstract
The application of industrial robots is an important symbol of a nation's industrial automation level. While domestic universities robot teaching is mostly on pint-sized robot. This paper introduces how combine the pint-sized robot teaching with the industrial robot practical operation. Through the pint-sized robot simulating industrial robot, realizing the manipulator operation, the student further to get more knowledge, learn the method to analyze and solve problems, and get effectively training and all-round development in innovation ability.
Key words: Pint-sized Robot; Industrial Robots; Innovation Ability
1.
Introduction
China's manufacturing industry is facing to the great challenge of high-end, undertaking international advanced manufacture and participating in the international division of labor. To speed up the development of industrial robots, is one of the main ways to seize the historic opportunity in China. But as industrial robots are usually large volumes, high cost, having certain risk on operation, and most of the industrial robot belongs to the type of teaching and reappearing on software programming, it is not conducive to school daily teaching and students' innovative research.By using pint-sized robot simulate industrial robot, realizing the manipulator operation, which can make students have a preliminary understanding to the operation of the industrial robot, improve the innovation ability, further to get more knowledge, learn the method to analyze and solve problems, and get effectively training and all-round development in innovation ability.
2.
Industrial Robots Overview
A. What is the industrial robots
of mechanical and electrical integration of automation production equipment, which has humanoid operation, automatic control, can repeat programming, and make all kinds of assignments in three-dimensional space. It is similar people’ walking, waist, arm, forearm, wrist and hand claw parts, so is also referred to as "manipulator".
According to the actuator movement control method industrial robot is divided into two kinds, Point to Point (PTP) and continuous Path (CP). PTP only control and perform industrial robot mechanism from the point to another point of accurate positioning, suitable for spot welding, general handling, loading and unloading, etc. CP can control actuators move according to the given trajectory, suitable for continuous welding and coating, etc.
B. The industrial robot Application and development
Abroad have extensive use of industrial robot automation production line in automotive industry, electronic industry, engineering machinery and other industries, to ensure product quality, improve production efficiency, and avoid a lot of industrial injury accident. In many countries around the world, nearly half a century of industrial robot operation practice shows that the popularity of industrial robots is the effective means to realize the automation of production, improve the efficiency of social production, and promote enterprise development and social productivity.
The application of industrial robots is an important symbol of a nation's industrial automation level. Using manipulator in production can improve the automation level of production, reduce labor intensity, ensure product quality, and achieve safe production. Especially in high temperature, high pressure, low temperature, low pressure, dust, explosive, toxic gas and radioactive and other harsh environments, it is of great significance to instead of people to carry on the normal work. Therefore, in the machining, stamping, casting, forging, welding, heat treatment, electroplating, painting, assembly, and light industry, transportation, etc., the robots get more and more widely quoted. China's manufacturing industry is rapidly into the era of robots.
SUN Bailin recently said in Beijing instruments exhibition that industrial robots have become important equipment and means in advanced manufacturing, and the emergence of robot workstation, especially robot automatic production line, significantly increase the competitiveness of the enterprises, and brings obvious benefit for the user.
Figure 1. Motoman industrial robot
3.
The Teaching pint-sized robot summary
The robot in our school teaching and innovation is "BIOLOID" suite. "BIOLOID" like toy block, the universal robot suit with that users can make anything they want. While general toy block can only make the structure users wants, BIOLOID not only can make the structure users want, also can realize the movement users want. The word "BIOLOID" is formed of "Bio" + "all" + "oid", which means that people can use it to make anything.
systematic plan to construct their ability specialty.
At present, many colleges and universities introduce the pint-sized robot course, but more of them are based on humanoid robot, such as 17 degrees of freedom robot, 21 degrees of freedom robot, and focus on the sensors and visual aspects. These are towards intelligent and far from industrial production or automation equipment. Our school belongs to the vocational college, and focus on cultivating students' professional ability. So with the modifications based on a pint-sized robot, we simulate and realize the function of industrial manipulator, It can not only implement the study of point-to-point movement trajectory for industrial manipulator, more suitable for students to learn and use in class, in the assembly and operability, but also reduces the risk of the students in the learning process. After all, the traditional industrial manipulator torque is large, easy to out of danger. And mechanical voltage of 380v, the potential risk is higher. Meanwhile it is high to the requirement of test site. Because of BIOLOID’ characteristics of free assembly at the same time, it also give students a chance to independent design and innovation.
Figure 2. The BIOLOID suite
4.
Pint-sized Robot Simulating Industrial Robot Project Introduction
BIOLOID suite’s hardware can be roughly divided into the following four.
A. The hardware part CM-5
remote control. It also has a built-in rechargeable battery.
AX-12
AX-12 is the dedicated robot servo motor, used as the robot's joints. Which can control the robot's speed and displacement, and also with the detection functions of temperature and load. In infinite rotation mode, it can be used as the wheel.
AX-S1
AX-S1 is the sensor, act as eyes and ears of the robot. Which has the distance sensor, brightness sensor, heat sensor, sound sensor, and other functions, with infrared remote control receiver, and also has the voice function.
Assembly
Assembly includes structure, wires, and wheels, etc. which can be used to connect the CM-5, AX-12+, AX-S1, etc., by the screws and nuts provided.
B. The software part
BIOLOID offers three programming software as follow.
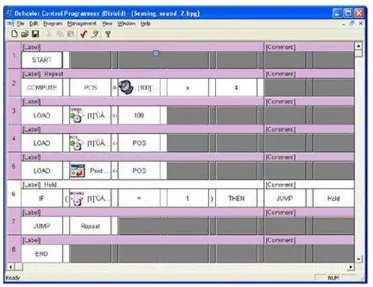
Behavior Control Programmer
It is the make robot software which can let the robot to realize some rules of recognition, judgment, action, etc.
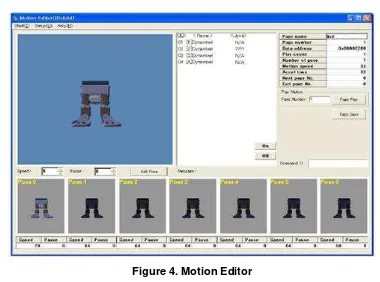
Motion Editor
Motion editor is the software which can easily design a complex robot motion. The motion designed in here will be called out and used in the behavior control program.
Figure 4. Motion Editor
Robot Terminal
This is the software used in the management of the robot, mainly used by advanced users. It is a kind of serial communication terminal, when users want to convey data to the robot or view the data robot feedback.
C. The project introduction
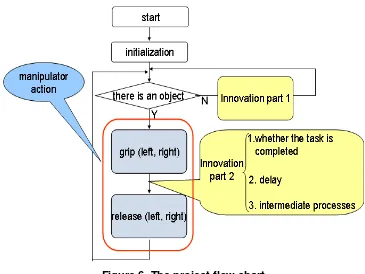
The flow chart of pint-sized robot simulating industrial robot program is as follows.
The flow chart
The project flow chart is as follows.
Figure 6. The project flow chart
Part of the program
Part of the program is as follow
Figure 7. Part of the program
Plan to show
Plan 1: Two arms simulating manipulator
Running effect of the plan is that the “manipulator” detects the object by sensors, closes its two arms, and clamps the object, then the user control the manipulator’s operation direction or loosen the arms by the buttons. The product picture as follows.
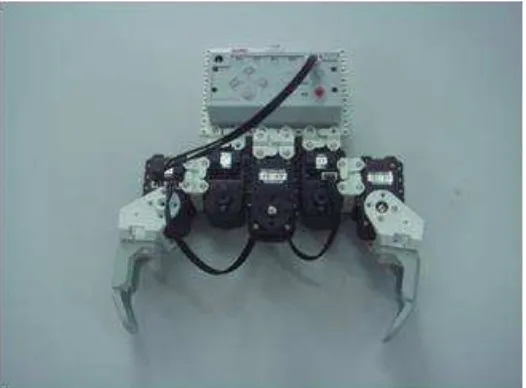
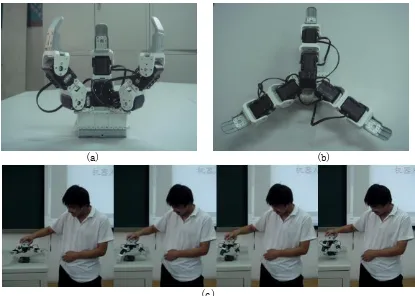
Plan 2: Three arms simulating manipulator
Running effect of the plan is that the “manipulator” detects the object by sensors, closes its three arms, and clamps the object, then loosen the arms after a delay. The product pictures as follows.
(a) (b)
(c)
Figure 9. The picture of three arms simulating manipulator
Through this kind of transplantation, students can not only use the knowledge more efficiently and more practically, but also understand the principle and structure of industrial robots for the future work. Meanwhile it broaden students’ thinking, exercise their independent design and innovation ability, and they also pay more attention to life. As the Plan 2, three arms simulating industrial manipulator just is the students modified and innovate from the grasping toy machine in the street
5.
Conclusion
computer, C language, sensor, automatic control, machinery and electronics, etc, generate strong interest in these, and lay the foundation of professional course learning and career development later. At the same time, student can combine with the actual life, observe, discover, use the knowledge they have learned, and independent design and innovate, then exercise their ability in design, operation and innovation.
Acknowledgements
This project comes from our school’s teaching reform project. Thanks the comrade of the teachers working on the first line for the technical help and support. Thanks all the teachers and relevant people that give us help in this project.
References
[1] X. Xiangwu and Z. Linli, “Robot and college students' innovative ability training”, Popular Science, no. 2, (2012), January.
[2] F. Wu, “Innovation practice curriculum research based on the robot contest”, Modern computers (pro), no. 25, (2011) December.
[3] Z. Xiaohua, Z. Tao and Y. Liping, “Analysis of robot technology education and innovative talent training”, scientific and technological information, no. 25, (2011) December.
[4] B. Luyan and L. Lisheng, “Design of 6-Axis Industrial Robot System Based on RTX”, Machine Tool & Hydraulics, vol. 41, no. 15, (2013) September.
[5] Z. Xingguo and X. Haili, “An open industrial robot system of SCARA type”, Manufacturing Automation, vol. 31, no. 1, (2009) March.
[6] X. Chengyi, L. Yenong, Z. Xiaoqing, J. Enzhang and L. Ying, “Kinematics Analysis and Simulation of MOTOMAN-UP6 Robot”, Machine Tool & Hydraulics, vol. 41, no. 9, (2011) July.
[7] C. Qinggui, W. Feng and S. Runjie, “design of BIOLOID main controller based on the STM32”, vol. 28, no. 11, (2013) February.
Authors
Zhao Dan
Zhao Dan received her M.S. degree in software engineering from Beijing university of Posts and Telecommunications in Beijing, China. She is currently a lecturer in the College of Automation Engineering at Beijing Polytechnic. Her research interest includes Computer Software, Mechanical and Electrical Integration. She has published several research papers in scholarly journals in the above research areas and has participated in several books.
Kang Yingjian