BAB II
LANDASAN TEORI
II.1. Sejarah Ilmu Robot
Teknologi modern dewasa ini, khususnya dalam dunia teknologi robot
mengalami perkembangan yang sangat pesat. Banyak negara maju (Amerika,
Jerman, Inggris, Jepang, Prancis) berlomba-lomba menciptakan robot-robot
mutakhir dengan keistimewaan-keistimewaan khusus.
Istilah robot pertama kali muncul pada tahun 1920, berasal dari kata
'robota' yang dalam bahasa Ceko (negeri Eropa Timur) berarti kerja paksa. Kata itu muncul dalam drama pentas Rossum's Universal Robots karya Karel Capek,
seorang penulis dari negara Ceko. Kemudian pada tahun 1950, Isaac Asimov
mengemukakan dalam novelnya 'Robot', tiga aturan perobotan yaitu: 1. Sebuah robot tidak boleh mencederai manusia
2. Robot harus mematuhi perintah yang diberikan manusia,
kecuali bila itu melanggar aturan pertama
3. Robot harus melindungi eksistensinya sendiri sebagai mesin
yang harus mematuhi manusia. [15]
Seiring berkembangnya teknologi, berbagai robot dibuat dengan
spesialisasi atau keistimewaan. Robot dengan keistimewaan khusus sangat erat
kaitannya dengan kebutuhan dalam dunia industri modern. Dewasa ini mereka
membantu menyelesaikan pekerjaan manusia ataupun menyelesaikan pekerjaan
yang tidak mampu diselesaikan manusia.
Pemanfaatan teknologi robot mempunyai sisi lain yang merupakan
ancaman bagi sebagian orang, karena menghilangkan kesempatan kerja. Dari
survei yang dilakukan terhadap pemakai robot di Inggris, penghematan tenaga
kerja ditulis sebagai faktor terpenting dalam mengambil keputusan untuk
mengadopsi robot. Meskipun demikian, walau beberapa pekerjaan dan tugas
dihasilkan dengan campur tangan robot, tetapi tedapat kecenderungan untuk tidak
menggantikan tenaga manusia seluruhnya. Secara teoritis robot dimasukkan
bukan pada faktor produksi yang berupa masukan buruh, melainkan pada
masukan modal. [7]
Negara yang paling getol mengadakan penelitian mengenai berbagai
macam robot ini adalah Jepang. Hal ini tak lain karena Jepang juga gigih dalam
melakukan penelitian teknologi infrastruktur seperti komponen dan piranti mikro
(microdevices) yang akhirnya bidang ini terbukti sebagai inti dari pengembangan robot modern. Sebenarnya, robot bukanlah 'barang baru' bagi masyarakat Jepang.
Robot pertama Jepang sudah diciptakan berabad-abad yang lalu. Tentunya tidak
dengan bentuk yang ada saat ini. Mulai dari robot yang bisa menyirami sawah
buatan Kaya-no-Miko seperti yang diceritakan dalam koleksi cerita abad ke-12,
Konjaku Monogatari Shu, hingga boneka robot karakuri-ningyo yang dikembangkan dengan tingkat teknologi yang cukup tinggi dan ditampilkan dalam
bentuk boneka sebagai hiburan di teater dan dalam festival (hingga sekarang tetap
Pada tahun 1927 muncul robot Jepang yang pertama yang dikembangkan
dengan mempergunakan teknologi Barat, diberi nama Gakutensoku. Robot ini bisa tersenyum, mengedip-ngedipkan mata dan bahkan bisa menulis. Dengan
adanya pengembangan robot ini, robot kini bisa menjadi teman, mempunyai
kecerdasan, dan perasaan manusia, seperti dalam cerita kartun Astro Boy. [14]
Keunggulan dalam teknologi robot tak dapat dipungkiri, telah lama
dijadikan icon kebanggaan negara-negara maju di dunia. Kecanggihan teknologi yang dimiliki, gedung-gedung tinggi yang mencakar langit, tingkat kesejahteraan
rakyatnya yang tinggi, kota-kotanya yang modern, belumlah terasa lengkap tanpa
popularitas kepiawaian dalam dunia robot.
Pada awalnya, aplikasi robot hampir tak dapat dipisahkan dengan industri
sehingga muncul istilah industrial robot dan robot manipulator. Definisi yang
populer ketika itu, robot industri adalah suatu robot tangan (arm robot) yang
diciptakan untuk berbagai keperluan dalam meningkatkan produksi, memiliki
bentuk lengan-lengan kaku yang terhubung secara seri dan memiliki sendi yang
dapat bergerak berputar (rotasi) atau memanjang/memendek (translasi atau
prismatik). Satu sisi lengan yang disebut sebagai pangkal ditanam pada bidang
atau meja yang statis (tidak bergerak), sedangkan sisi yang lain yang disebut
sebagai ujung (end of effector) dapat dimuati dengan tool tertentu sesuai dengan tugas robot. Dalam dunia mekanikal, manipulator ini memiliki dua bagian, yaitu
tangan atau lengan (arm) dan pergelangan (wrist). Pada pergelangan ini dapat
industri sebagai unggulan. Bahkan beberapa perusahaan di Jepang masih
menjadikan manipulator sebagai produk utamanya, seperti Fanuc Inc. yang
memiliki pabrik utamanya di lereng gunung Fuji itu.
Dewasa ini mungkin definisi robot industri itu sudah tidak sesuai lagi
karena teknologi mobile robot juga sudah dipakai meluas sejak awal 80-an. Seiring itu pula kemudian muncul istilah robot humanoid (konstruksi mirip
manusia), animaloid (mirip binatang), dan sebagainya. Bahkan kini dalam industri spesifik seperti industri perfilman, industri angkasa luar dan industri pertahanan
atau mesin perang, robot arm atau manipulator bisa jadi hanya menjadi bagian saja sistem robot secara keseluruhan.
Lain lagi bagi insan film. Kini dunia robotik bagi mereka dapat direkayasa
secara virtual saja. Robot dalam imajinasi mereka berkembang menjadi tokoh
animasi yang tidak lagi perlu dibuat secara riil. Dari sinilah nampaknya kemudian
muncul cabang disiplin baru yang dikenal sebagai virtual reality. Sebelum suatu robot betul-betul diputuskan untuk dibuat, pakar robot cukup mencobanya dahulu
secara virtual, secara imajinasi. Baik dalam hal fisik maupun dalam hal
pergerakan yang sesungguhnya. Bahkan apakah program kemudi yang
dikembangkan dapat berfungsi dengan baik dalam mengendalikan robot itu,
cukup diujicoba secara virtual dulu. Hal ini erat kaitannya dengan kecanggihan
komputer-komputer era baru dan teknologi pemrograman yang terus menerus
II.2. Struktur Robot
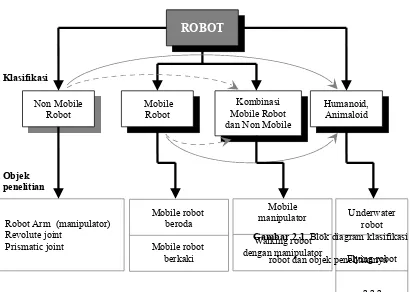
Pada dasarnya dilihat dari struktur dan fungsi fisiknya (pendekatan visual)
robot terdiri dari dua bagian, yaitu:
1. Mobile Robot
Robot mobil atau mobile robot adalah konstruksi robot yang ciri khasnya adalah mempunyai aktuator berupa roda untuk menggerakkan
keseluruhan badan robot tersebut, sehingga robot tersebut dapat melakukan
perpindahan posisi dari satu titik ke titik lain. [10]
Mobile robot adalah tipe robot yang paling populer dalam dunia penelitian robot. Sebutan ini biasa digunakan sebagai kata kunci utama untuk
mencari rujukan atau referensi yang berkaitan dengan robotik di internet.
Publikasi dengan judul yang berkaitan mobile robot sering menjadi daya tarik, tidak hanya bagi kalangan peneliti, tapi juga bagi kalangan awam. Dari segi
manfaat, penelitian tentang berbagai tipe mobile robot diharapkan dapat membantu manusia dalam melakukan otomasi dalam transportasi, platform
bergerak untuk robot industri, eksplorasi tanpa awak, dan masih banyak lagi.
[12]
2. Non Mobile Robot
Dari kelompok nonmobile robot, merupakan robot yang hanya berdiri pada satu titik tempat secara terus menerus dalam menjalankan fungsinya.
Robot jenis ini biasa disebut robot manipulator atau arm robot, atau robot
pabrik-pabrik perakitan mobil yang biasa berperan sebagai penyambung (las)
pada bagian-bagian kendaraan. [15]
Pada jenis robot ini sistem mekanik dari robot terdiri dari dua susunan
rangka (link) dan engsel (joint) yang mampu menghasilkan gerakan terkontrol. Terdapat dua tipe dasar dari jenis yang digunakan dalam industri, yaitu:
a. Revolute Joint (R), perputaran pada sumbu
tertentu
b. Prismatic Joint (P), pergeseran sepanjang
sumbu tertentu [13]
Pada akhirnya kombinasi antara mobile robot dengan non mobile robot
dapat menghasilkan kelompok kombinasi konvensional (mobile dengan non-mobile) serta kelompok non-konvensional.
Untuk kelompok pertama sengaja diberi nama konvensional, karena nama
yang dipakai dalam konteks penelitian adalah nama-nama yang dianggap umum,
seperti mobile manipulator, robot pemanjat (climbing robot), dan walking robot.
Sedangkan kelompok non-konvensional dapat berupa robot humanoid, animaloid, extra-ordinary, atau segala bentuk inovasi penyerupaan yang bisa dilakukan.
Kelompok ini banyak dimanfaatkan sebagai ikon keunggulan dalam penelitian
robotik, seperti robot Advanced Step in Innovative Mobility (ASIMO) buatan Jepang. Sementara robot bawah air dan robot terbang lebih banyak dikembangkan
sebagai peralatan untuk membantu penelitian yang berkaitan dan untuk proyek
Non Mobile
Masalah pengendalian berkaitan erat dengan strategi yang memungkinkan
sebuah mikrokontroler mengarahkan gerakan-gerakan dari sebuah robot melalui
sensor, dan penyampaian respon robot tersebut ke mikrokontroler. Berikut adalah
suatu prinsip kendali yang berhubungan dengan kontrol robot. [6]
Kendali loop terbuka merupakan suatu prinsip kendali dimana aliran
Gambar 2.2. Diagram blok open loop control
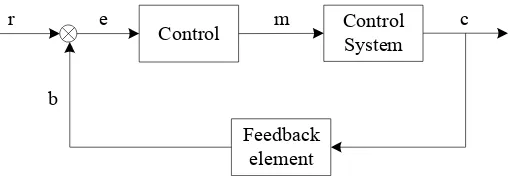
II.3.2. Kendali loop tertutup (close loop control)
Kendali loop tertutup merupakan kebalikan dari prinsip kendali loop
terbuka. Pengertiannya adalah suatu prinsip kendali dimana loop tersebut
memiliki lintasan yang tetutup untuk proses aliran informasinya dari input
ke output dan kembali ke input lagi karena adanya feedback control. Pada pembuatan alat ini, penulis menggunakan prinsip close loop control. Beikut adalah blok diagram dari close loop control :
Gambar 2.3. Diagram blok close loop control.
Huruf r merupakan suatu masukan yang menentukan suatu nilai yang
diharapkan bagi sistem yang dikendalikan tersebut. Sedangkan lingkaran
tanda silang menandakan sutu titik penjumlahan antara r dan b (umpan balik
dari keluaran). Keluaran dari penjumlahan adalah sinyal kesalahan (e) yang nilainya adalah selisih dari r dan b. Dengan kata lain, sinyal kesalahan e
adalah perbedaan antara apa yang diinginkan dengan apa yg dihasilkan. [6]
II.4. Artificial Intelegence
II.4.1. Definisi kecerdasan buatan
Berbicara tentang robot tidak lepas dengan yang disebut AI atau
Artificial Intelegence. Dalam bahasa Indonesia, AI adalah kecerdasan
buatan. Sesuai dengan namanya, AI adalah salah satu cabang sains
komputer yang mempelajari otomatisasi tingkah laku cerdas (intelligent)
yang didasarkan pada prinsip-prinsip teoritikal dan terapan yang
menyangkut struktur data yang digunakan dalam representasi pengetahuan
(knowledge representation), algoritma yang diperlukan dalam penerapan
pengetahuan itu, serta teknik-teknik bahasa dan pemrograman yang
dipakai dalam implementasinya. Yang paling banyak menerapkan AI
adalah dunia robotika. [6]
Dalam tubuh manusia terdapat ribuan urat saraf yang terhubung
dalam pusat otak. Sehingga manusia tidak hanya memiliki kemampuan
mengindera, mengingat, dan mengambil keputusan. Namun, kemampuan
dalam otak ini. Salah satu contoh AI dalam dunia komputer, yaitu ketika
Deep Blue bertanding catur melawan seorang juara dunia asal Rusia, yaitu Gary Kasparov yang terjadi pada tanggal 10 Februari 1996. [15]
Banyak cara untuk mendefinisikan kecerdasan buatan, diantaranya
adalah :
1. Suatu studi yang mengupayakan bagaimana agar komputer berlaku
cerdas.
2. Studi yang membuat komputer dapat menyelesaikan persoalan
yang sulit.
3. Teknologi yang mensimulasikan kecerdasan manusia, yaitu
bagaimana mendefinisikan dan mencoba menyelesaikan persoalan
menggunakan komputer dengan meniru bagaimana manusia
menyelesaikan dengan cepat.
II.4.2. Ruang lingkup kecerdasan buatan
Makin pesatnya perkembangan teknologi menyebabkan adanya
perkembangan dan perluasan lingkup yang membutuhkan kehadiran
kecerdasan buatan. Karakteristik cerdas sudah mulai dibutuhkan di
berbagai disiplin ilmu dan teknologi
Dewasa ini, kecerdasan buatan juga memberikan kontribusi yang
cukup besar di bidang manajemen. Adanya sistem pendukung keputusan,
buatan. Untuk memudahkan hal tersebut, maka pengklasifikasian lingkup
kecerdasan buatan didasarkan pada output yang diberikan.
Lingkup utama dalam kecerdasan buatan adalah:
1. Sistem pakar (expert system). Disini komputer digunakan sebagai sarana untuk menyimpan pengetahuan para pakar.
Dengan demikian komputer akan memiliki keahlian untuk
menyelesaikan permasalahan dengan meniru keahlian yang dimiliki
oleh pakar.
2. Pengolahan bahasa alami (natural language processing). Dengan pengolahan bahasa alami ini diharapkan user dapat berkomunikasi dengan komputer dengan menggunakan bahasa
sehari-hari.
3. Pengenalan ucapan (speech recognition). Melalui
pengenalan ucapan diharapkan manusia dapat berkomunikasi dengan
komputer menggunakan suara.
4. Robotika & sistem sensor (robotics & sensory systems).
5. Computer vision, mencoba untuk dapat menginterpretasikan gambar atau obyek-obyek tampak melalui
komputer.
6. Intelligent computer-aided instruction. Komputer dapat digunakan sebagai tutor yang dapat melatih dan mengajar.
digunakan apa yang disebut dengan pencarian ruang keadaan (state
space search). Permainan dapat menghasilkan sejumlah besar pencarian ruang. Teknik untuk menentukan alternatif dalam menyimak
problema ruang disebut dengan heuristik.[6]
Sejalan dengan berkembangnya permasalahan manusia, maka
manusia harus menggunakan sumber daya secara eficien. Untuk
melakukan hal tersebut, maka kita membutuhkan bantuan dengan kualitas
yang tinggi dari komputer. Dalam kehidupan manusia, komputer dapat
membantu dalam bidang :
Pertanian, komputer dapat mengkontrol robot yang melakukan
kontrol terhadap hama, pemangkasan pohon, pemilihan hasil panen.
Pabrik, komputer dapat menkontrol robot yang harus
mengerjakan pekerjaan berbahaya dan membosankan, inspeksi dan
melakukan maintenance pekerjaan.
Kesehatan, komputer dapat membantu untuk mendiagnosis
penyakit, melakukan monitoring kondisi pasien, memberikan
treatment yang cocok.
Pekerjaan rumah tangga, komputer dapat memberikan nasihat
dalam memasak dan berbelanja, membantu membersihkan lantai,
memotong rumput, mencuci pakaian, dan melakukan maintenance
II.4.3. Kecerdasan buatan dan kecerdasan alami
Jika dibanding kecerdasan alami, kecerdasan buatan memiliki
keuntungan komersial, antara lain:
1. Kecerdasan buatan lebih bersifat permanen. Kecerdasan
alami akan cepat mengalami perubahan.
2. Kecerdasan buatan lebih mudah diduplikasi dan
disebarkan.
3. Kecerdasan buatan bersifat konsisten.
4. Kecerdasan buatan dapat didokumentasi.
5. Kecerdasan buatan dapat mengerjakan pekerjaan lebih
cepat dibanding dengan kecerdasan alami.
6. Kecerdasan buatan dapat mengerjakan pekerjaan lebih
baik dibanding dengan kecerdasan alami.
Keuntungan kecerdasan alami:
1. Kreatif.
2. Kecerdasan alami memungkinkan orang untuk
menggunakan pengalaman secara langsung. Sedang pada kecerdasan
buatan harus bekerja dengan input-input simbolik.
3. Pemikiran manusia dapat digunakan secara luas,
II.5. Sensor
Robot juga membutuhkan masukan (input) yang akan menentukan apa yang harus dilakukan oleh robot. Input ini umumnya masuk ke dalam otak robot
dengan berbagai macam cara. Ada yang menggunakan remote, atau diberikan sebelum robot diaktifkan. Dan ada juga yang langsung diberikan pada robot
melalui programnya. Pada jenis yang ketiga ini, begitu robot dinyalankan ia akan
menjalankan apa yang sudah ditentukan baginya. Hal ini sangat berlaku bagi
robot-robot industri pada umumnya.
Sedangkan, untuk tipe yang pertama dan kedua agak berbeda. Perintah
datang dari luar. Tentu saja perintah-perintah ini harus sesuai dengan kemampuan
si robot itu sendiri, sebab bila tidak, tentu si robot tidak akan menjalankannya.
Robot juga dapat menerima masukan dari robot itu sendiri tanpa adanya campur
tangan manusia secara langsung, yaitu melalui sensor. [15]
Secara umum berdasarkan fungsi dan penggunaannya sensor dapat
dikelompokan menjadi 3 bagian yaitu:
a. Thermalsensor (sensor panas)
Sensor thermal adalah sensor yang digunakan untuk mendeteksi gejala
perubahan panas/temperature/suhu pada suatu dimensi benda atau dimensi
transistor, photo dioda, photo multiplier, photovoltaik, infrared pyrometer,
hygrometer, dsb.
b. Optic sensor (sensor cahaya)
Optic sensor atau cahaya adalah sensor yang mendeteksi perubahan cahaya
dari sumber cahaya, pantulan cahaya ataupun bias cahaya yang mengernai
benda atau ruangan. Contoh; photocell, phototransistor, photodiode,
photovoltaic, phot multiplier, pyrometer optic, dsb. c. Mechanic sensor (sensor mekanis)
Sensor mekanis adalah sensor yang mendeteksi perubahan gerak mekanis,
seperti perpindahan atau pergeseran atau posisi, gerak lurus dan melingkar,
tekanan, aliran, level dsb. Semua gerak mekanis tersebut pada intinya hanya
terdiri dari tiga macam, yaitu gerak lurus, gerak melingkar dan gerak
memuntir. Gerak mekanis disebabkan oleh adanya gaya aksi yang dapat
menimbulkan gaya reaksi. Banyak cara dilakukan untuk mengetahui atau
mengukur gerak mekanis misalnya mengukur jarak atau posisi dengan meter,
mengukur kecepatan dengan tachometer, mengukur debit air dengan rotameter
dsb. Tetapi jika ditemui gerakan mekanis yang berada dalam suatu sistem
yang kompleks maka diperlukan sebuah sensor untuk mendeteksi atau
menginformasikan nilai yang akan diukur. Berikut akan dijabarkan beberapa
jenis sensor mekanis yang salah satu dari jenis sensornya satunya penulis
II.5.1. Sensor Ultrasonic
Ultrasonic secara khas menggambarkan suatu sensor yang
mengirimkan sinyal berfrekuensi tinggi melalui jarak yang dapat diatur,
dan bereaksi terhadap perubahan dalam gelombang tekanan suara yang
disebabkan oleh gerakan. Aplikasi dan studi gelombang yang memiliki
frekuensi diatas batas pendengaran manusia (kira-kira 16 KHz).
Penggunaan paling luas dari ultrasonic adalah pada bidang kedokteran
yang berguna sebagai diagnosa medis.
Gambar 2.4 Sensor ultrasonic
Gelombang suara berisi mengenai suatu rangkaian tekanan yang
merambat melalui suatu medium dengan beberapa percepatan yang
terbatas. Gelombang ini bergerak menjauh dari sumber bunyi, yang mana
rumus untuk suatu gas ideal adalah:
Dimana : c = kecepatan suara
γ = perbandingan dari spesifikasi panas (1,4 untuk udara)
R = konstanta gas (287 ft2 K/s2)
T = suhu (K) 273 + oC
Dengan menggunakan sensor ultrasonic, robot dapat berbelok bila
didepannya ada benda penghalang. Dengan menghitung selisih waktu
antara masuknya sinyal hasil pantulan benda didepannya, maka robot
dapat mengetahui jarak benda yang ada di depannya
Dimana : d = jarak
c = kecepatan suara
t of = pengukuran waktu antara transmitter dan receiver[3]
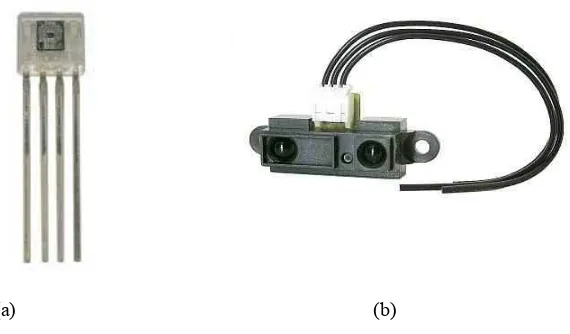
II.5.2. Sensor Jarak (Proximity Sensor)
Tidak seperti sensor mekanik yang lain, Proximity Sensor dapat
mendeteksi objek tanpa bersentuhan secara fisik. Oleh karena itu
proximity sensor ini memiliki kelebihan, diantaranya :
Respon yang cepat
Tahan lama
Memiliki kehandalan yang tinggi
Power supply 4,5 - 5,5 Volt.
Output berupa tegangan analog yang berkisar antara 0,4 –
2,5 Volt.
Pembacaan jarak tidak begitu dipengaruhi oleh warna
objek yang diukur
Dapat mendeteksi objek dengan jarak berkisar antara 8
cm – 80 cm
Tidak membutuhkan rangkain kontrol eksternal
Tidak begitu dipengaruhi oleh kondisi pencahayaan
ruangan
Sekalipun dengan kelebihan diatas, proximity sensor tidak sepenuhnya
dapat diandalkan. [2]
Jadi pemilihan sensor dipilih menurut aplikasi tertentu, banyak
jenis dari proximity sensor yang tersedia dan seringkali disesuaikan dengan prinsip kerjanya, diantaranya : pembangkit frekuensi yang tinggi,
magnetic, ultrasonic, dan gelombang radio.
(a) (b)
Gambar 2.5 Jenis proximity sensor type (a) Hamamatsu 6986 (b) Sharp GP2D12
II.6. Motor
II.6.1. Motor Stepper
Motor stepper banyak digunakan untuk aplikasi-aplikasi yang
piringan CD. Pada dasarnya motor stepper merupakan motor dc yang tidak
memiliki komutator. Umumnya motor stepper hanya mempunyai kumparan pada statornya, sedangkan bagian rotornya merupakan magnet
permanen.
Pada pengoperasian motor stepper ini berdasarkan pulsa-pulsa listrik. Setiap kali mengirim pulsa ke pengontrol elektronik, maka motor
akan bergerak “selangkah”, yaitu satu putaran sudut kecil. Ukuran langkah
tersebut bergantung pada perancangan motor, dapat sekecil 1,5 derajat
sampai paling besar 30 derajat. Motor akan berputar lebih cepat atau lebih
lambat dengan mengirim lebih banyak atau lebih sedikit pulsa dalam tiap
detiknya. [7]
Gambar 2.6. Bentuk fisik motor stepper
Dengan model seperti ini, motor stepper dapat diatur posisinya
untuk berada pada posisi tertentu dan/atau berputar ke arah yang
diinginkan (searah jarum jam atau sebaliknya). Kecepatan motor stepper
pada dasarnya ditentukan oleh kecepatan pemberian data pada
komutatornya. Semakin besar data yang diberikan maka semakin cepat
II.6.2. Motor DC
Motor DC merupakan suatu motor yang mempunyai dua bagian
pokok, yaitu:
1. Rotor atau armature, yaitu bagian yang berputar (rotating part). Rotor ini berupa sebuah koil di mana arus listrik mengalir.
2. Stator, yaitu bagian yang tetap (stationery part), Stator ini menghasilkan medan magnet , baik yang dibangkitkan dari sebuah koil
(elektromagnet) ataupun magnet permanen.
Gambar 2.7. Bentuk fisik motor DC
II.7. Mikrokontroler
Adalah sangat penting untuk mengetahui perbedaan antara
mikrokomputer, mikroprosesor dan mikrokontroler. Suatu mikroprosesor adalah
bagian dari Central Processing Unit (CPU) dari sebuah komputer, tanpa memori,
I/O, dan periferal yang dibutuhkan oleh suatu sistem lengkap. Sebagai contoh,
perangkat pendukung yang dapat berupa Random Access Memory (RAM), Read
Only Memory (ROM), dan Input/Output (I/O).
Bila sebuah mikroprosesor dikombinasikan dengan I/O dan memori
(RAM/ROM), maka akan dihasilkan sebuah mikrokomputer. Pada kenyataannya
mengkombinasikan CPU dengan memori dan I/O dapat juga dilakukan dalam
level chip, yang menghasilkan Single Chip Microcomputer SCM) untuk
membedakannya dengan mikrokomputer. Untuk selanjutnya SCM ini dapat
disebut dengan mikrokontroler [5].
Perbedaan yang paling menonjol antara mikrokomputer seperti IBM PC
dibandingkan dengan SCM adalah pada penggunaan perangkat masukan/keluaran
dan juga media penyimpanan program. Pada IBM PC menggunakan disket atau
hard disk sebagai media penyimpanan program, sementara pada mikrokontroler menggunakan Errassable Programmable Read Only Memory (EPROM) sebagai
media penyimpan programnya.
Pada mikrokontroler sudah terdapat komponen–komponen mikroprosesor
dengan bus–bus internal yang saling berhubungan. Komponen-komponen tersebut
adalah RAM, ROM, timer, komponen I/O paralel dan serial, dan interrupt controller.
II.8. Interupsi (Interrupt)
Seperti namanya, interupsi adalah suatu kejadian yang akan menghentikan
sementara jalan program saat itu. Dengan interupsi, suatu alur program dapat
melanjutkan aliran program secara normal seperti tidak pernah ada interupsi.
Subroutine ini yang disebut dengan interrupt handler, dan hanya dijalankan jika terjadi suatu kejadian khusus (event). Mikrokontroler MCS-51 bisa dikonfigurasi
untuk menangani interupsi yang disebabkan oleh salah satu dari kejadian.
Dengan interupsi ini, dapat dengan mudah dimonitor kejadian-kejadian yang diinginkan. Tanpa interupsi maka proses monitor ini dilakukan manual
dengan pengecekan berulang. Proses pengecekan manual ini akan membuat
program menjadi panjang dan lebih rumit.
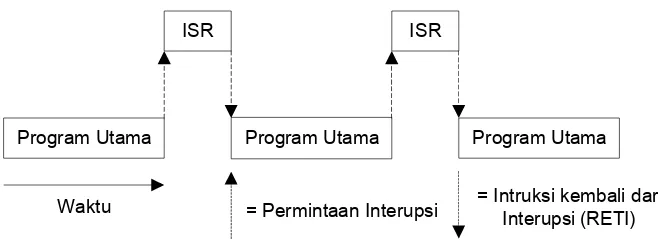
Program yang dijalankan dengan cara interupsi, dinamakan sebagai
program layanan interupsi (ISR – Interrupt Servive Routine). Saat prosesor menjalankan ISR, pekerjaan yang sedang dikerjakan pada program utama
sementara ditinggalkan, kemudian setelah selesai menjalankan ISR prosesor
menjalankan kembali program utama, seperti yang digambarkan pada gambar 2.7
Program Utama Program Utama Program Utama
ISR ISR
= Permintaan Interupsi = Intruksi kembali dari Interupsi (RETI)
Waktu
Gambar 2.8 Bagan kerja prosesor melayani interupsi
1. Interupsi yang tidak dapat dihalangi oleh perangkat lunak
(non maskable interrupt), misalnya Reset.
2. Interupsi yang dapat dihalangi perangkat lunak (maskable
interrupt). Contohnya adalah INT0 dan INT1(eksternal) serta Timer/Counter 0, Timer/Counter1, dan interupsi dari port serial (internal).
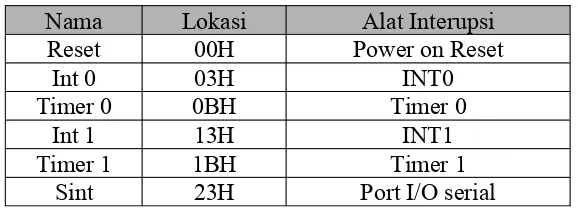
Instruksi Return From Interrupt Routine (RETI) harus digunakan untuk kembali dari layanan rutin interupsi. Instruksi ini dipakai agar saluran interupsi
kembali dapat dipakai. Alamat awal layanan rutin interupsi dari setiap sumber
interupsi terdapat pada tabel di bawah ini.
Tabel 2.1. Alamat layanan rutin interupsi
Nama Lokasi Alat Interupsi
Reset 00H Power on Reset
Int 0 03H INT0
Timer 0 0BH Timer 0
Int 1 13H INT1
Timer 1 1BH Timer 1
Sint 23H Port I/O serial
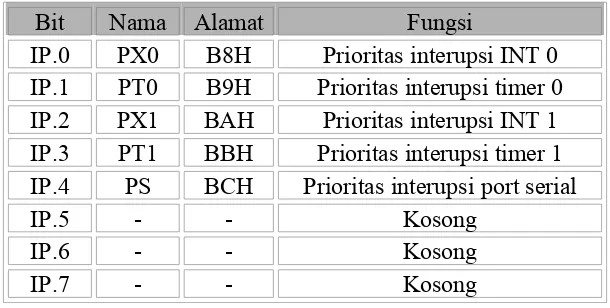
II.8.1. Prioritas Interupsi
Setiap sumber interupsi dapat diprogram secara individual menjadi
satu atau dua tingkat prioritas dengan mengatur bit pada Special Function Register (SFR) yang bernama Interrupt Priority (IP). Bit-bit pada IP
adalah sebagai berikut :
MSB LSB
Priority bit = 1 menandakan prioritas tinggi
Priority bit = 0 menandakan prioritas rendah
Tabel 2.2. Konfigurasi bit-bit SFR IP
Bit Nama Alamat Fungsi
IP.0 PX0 B8H Prioritas interupsi INT 0
IP.1 PT0 B9H Prioritas interupsi timer 0
IP.2 PX1 BAH Prioritas interupsi INT 1
IP.3 PT1 BBH Prioritas interupsi timer 1
IP.4 PS BCH Prioritas interupsi port serial
IP.5 - - Kosong
IP.6 - - Kosong
IP.7 - - Kosong
Pemakaian prioritas interupsi di atas memiliki beberapa peraturan
yang tercantum di bawah ini:
a. Tidak ada interupsi yang menginterupsi interupsi prioritas
teringgi.
b. Interupsi prioritas tinggi boleh menginterupsi interupsi
prioritas rendah.
c. Interupsi prioritas rendah boleh terjadi jika tidak ada
interupsi lain yang sedang dijalankan.
d. Jika dua interupsi terjadi secara bersamaan, interupsi yang
keduanya memiliki prioritas sama, maka interupsi yang berada pada
urutan pollingakan dikerjakan terlebih dahulu.
Mikrokontroler MCS-51 secara otomatis akan menguji apakah
sebuah interupsi bisa terjadi setelah setiap instruksi dikerjakan.
Pengecekan ini mengikuti suatu alur yang disebut dengan Polling Sequence dengan urutan:
1. Interupsi eksternal 0
2. Interupsi timer 1
3. Interupsi eksternal 1
4. Interupsi timer 1
5. Interupsi serial
Ini berarti jika sebuah interupsi serial terjadi pada waktu
bersamaan dengan interupsi eksternal 0, maka interupsi eksternal 0 akan dikerjakan terlebih dahulu dan interupsi serial baru akan dikerjakan setelah
pengerjaan rutin interupsi eksternal 0 selesai dilakukan.
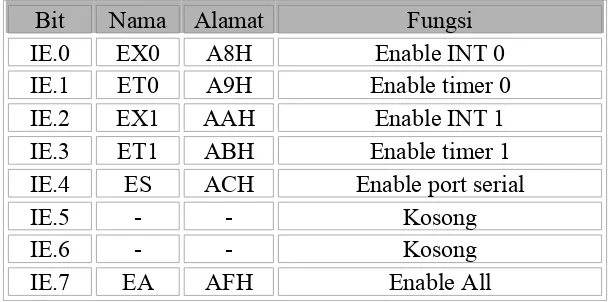
II.8.2. Interrupt Enable
Setiap sumber interupsi dapat diaktifkan maupun dilumpuhkan
secara indvidual dengan mengatur satu bit di SFR yang bernama interrupt enable (IE). Bit-bit dari IE didefinisikan sebagai berikut:
MSB LSB
Tabel 2.3. Konfigurasi bit-bit SFR IE
Bit Nama Alamat Fungsi
IE.0 EX0 A8H Enable INT 0
IE.1 ET0 A9H Enable timer 0
IE.2 EX1 AAH Enable INT 1
IE.3 ET1 ABH Enable timer 1
IE.4 ES ACH Enable port serial
IE.5 - - Kosong
IE.6 - - Kosong