BAB III
PERANCANGAN DAN PEMBAHASAN ALAT
III.1. Blok Sistem Robot Secara Umum
Untuk Navigasi Untuk Manipulasi
(gerak berpindah) (gerak penanganan)
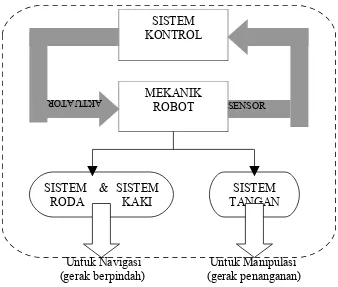
Gambar 3.1. Diagram blok sistem robot secara umum
Gambar diatas merupakan blok sistem robot secara umum dan orientasi
fungsinya yang biasa kita jumpai dan berhubungan dengan “Real World”. Berikut
adalah penjelasan dari blok rangkaian diatas :
Sistem kontrol (control system)
SISTEM KONTROL
MEKANIK
ROBOT SENSOR
AK TU AT OR
SISTEM & SISTEM
RODA KAKI
Adalah rangkaian elektronik yang setidak-tidaknya terdiri dari rangkaian prosesor
(CPU, memori, komponen interface Input / Output), signal conditioning untuk
sensor (analog dan atau digital), serta driver untuk aktuator.
Mekanik robot (mechanical robot)
Adalah sistem mekanik yang dapat terdiri dari fungsi gerak. Jumlah fungsi gerak
disebut sebagai derajat kebebasan atau degree of freedom (DOF). Sebuah sendi
yang diwakili oleh sebuah gerak aktuator disebut sebagai satu DOF.
Sensor
Adalah perangkat atau komponen yang bertugas mendeteksi (hasil) gerakan atau
fenomena lingkungan yang diperlukan oleh sistem kontroler. Dapat dibuat dari
sistem yang paling sederhana seperti sensor inframerah, ultrasonic, saklar
ON/OFF, dan sebagainya.
Aktuator (actuator)
Adalah perangkat elektromekanik yang menghasilkan daya gerakan. Terdiri dari
tiga jenis, yaitu:
1. Electric actuator, yaitu perangkat menggunakan sistem
motor listrik (motor DC, motor DC servo, maupun motor stepper.
2. Pneumatik actuator, yaitu perangkat yang menggunakan
udara atau gas nitrogen.
3. Hydraulic actuator, yaitu perangkat yang menggunakan
bahan cair seperti oli [12]
Adalah sistem mekanik yang dapat menggerakkan robot untuk berpindah posisi.
Sistem kaki
Pada dasarnya sistem kaki adalah gerakan “roda” yang didisain sedemikian rupa
hingga memiliki kemampuan gerak seperti mahluk hidup. Robot berjalan dengan
sistem dua kaki yang memiliki struktur kaki seperti manusia setidak-tidaknya
mempunyai sendi-sendi yang mewakili pergelangan kaki, lutut, dan pinggul.
Sistem tangan
Adalah bagian atau anggota badan robot selain sistem roda atau kaki. Dalam
konteks mobile robot, bagian tangan ini dikenal sebagai manipulator yaitu sistem
gerak yang berfungsi untuk memanipulasi (memegang, mengambil, mengangkat,
memindah atau mengolah) obyek. [4]
III.2. Diagram Blok Rangkaian
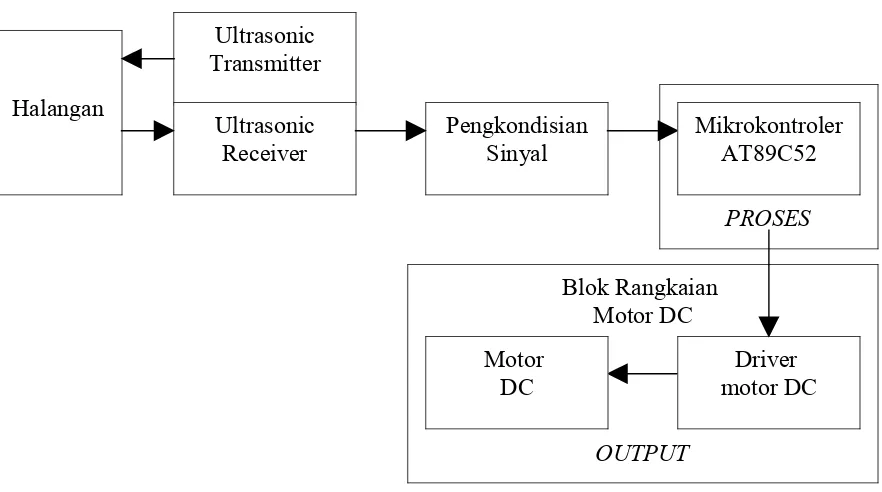
Dibawah ini adalah gambar blok rangkaian dari robot yang dibuat oleh penulis
yang terdiri dari tiga proses, yaitu input (sensor), proses (mikrokontroler), dan output
(motor DC).
Gambar 3.2. Diagram blok rangkaian
Berdasarkan blok diagram diatas, sensor yang digunakan untuk mengenal
keadaan lingkungan luar dimana robot ini akan beroperasi adalah sensor ultrasonic.
Sensor ini akan bekerja dengan cara mendeteksi adanya halangan dari pergerakan
robot mobile ini. Pendeteksian sinyal yang datang menggunakan prinsip pemantulan
dari rangkaian transmitter ke rangkaian receiver dari sensor ultrasonic. Hasil
pemantulan tersebut masih dalam bentuk sinyal analog. Sedangkan sinyal yang
dibutuhkan oleh bagian processing dalam hal ini dilakukan oleh mikrokontroler
adalah sinyal digital. Oleh karena itu maka pada output rangkaian receiver sensor
ultrasonic dibuat rangkaian tambahan lagi berupa rangkaian transistor yang dalam
rangkaian ini memiliki fungsi sebagai saklar. Ultrasonic
Transmitter
Ultrasonic Receiver Halangan
Pengkondisian Sinyal
Mikrokontroler AT89C52
Driver motor DC Motor
DC
PROSES
Blok Rangkaian Motor DC
Output dari rangkaian transistor sebagai saklar ini sudah dalam bentuk digital,
yaitu berupa kondisi HIGH (1) atau LOW (0). Dari proses pengkondisian sinyal ini
maka diperoleh keluaran berupa data digital dari receiver dan akan diberikan kepada
mikrokontroler AT89C52. Mikrokontroler akan mengolah hasil input dari blok
rangkaian sensor yang terdapat pada P1.1 sampai P1.3. Prosesnya adalah bagaimana
mikrokontroler akan menterjemahkan hasil input dari sensor dan
mensingkronisasikannya dengan program yang sudah “tertanam” di chip
mikrokontroler tersebut.
Proses mikrokontroler untuk menterjemahkannya dan menjadi penghubung
antara input dan output sangat rumit. Disini mikrokontroler akan menggabungkan dan
mensinkronisasikan antara software dengan blok perancangan hardware. Dari hasil
proses yang dilakukan oleh mikrokontroler maka akan dihasilkan suatu kondisi
perintah kepada driver dari motor dc, dalam hal ini berupa IC L293D yang kemudian
akan menggerakkan motor dc, baik ke arah kanan maupun ke arah kiri tergantung
dari hasil input dari sensor dan hasil output dari mikrokontroler AT89C52 yang
diberikan kepada IC pada driver motor tersebut.
III.3. Perancangan Perangkat Keras (Hardware)
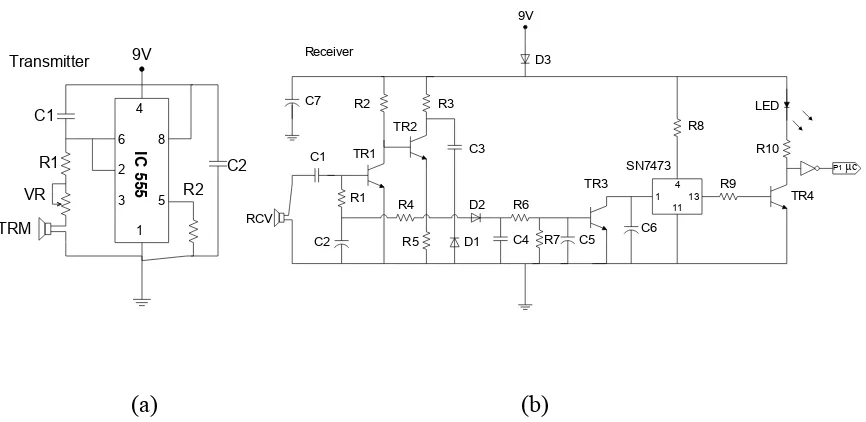
Pemancar gelombang ultrasonic disusun oleh sebuah transduser
ultrasonik yang diberi gelombang kotak dengan frekuensi sekitar 40 KHz.
Gelombang kotak dihasilkan oleh untai multivibrator yang disusun oleh IC 555
yang bekerja secara astable. Rangkaian pemancar ultrasonic ditunjukkan
gambar 3.3 (a).
(a) (b)
Gambar 3.3. Rangkaian sensor ultrasonik. (a) Transmitter (b) Receiver
Rangkaian sensor dibuat sebanyak 3 bagian yang pada tiap bagian dari
sensor terdiri dari pasangan transmiter dan receiver dari sensor ultrasonic.
Ketiga bagian tersebut ditempatkan pada bagian depan serta bagian samping
kanan dan kiri dari robot.
Output dari ketiga pasangan sensor ini dihubungkan ke mikrokontroler
untuk memberikan input kepada IC L293D sebagai driver motor untuk
menggerakkan motor sesuai dengan data yang diterima dari mikrokontroler.
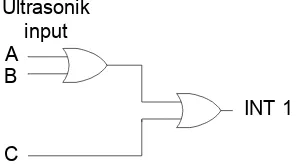
Selain sebagai input data, output dari sensor digunakan juga sebagai
pembangkit sinyal interrupt. Untuk itu, maka diperlukan rangkaian lain yang
akan membangkitkan sinyal interrupt ketika salah satu atau lebih sensor
tersebut mendeteksi sambungan antara transmiter dengan receiver.
Pada kasus ini penulis menambahkan gerbang logika OR. Dengan
menggunakan gerbang logika OR, interrupt high akan aktif (INT 1=1).
Komponen yang digunakan adalah IC 74LS32.
Gambar 3.4. Rangkaian pembangkit interupt
Dibawah ini adalah keluaran yang dihasilkan dari rangkaian dengan
menggunakan gerbang logika OR
Tabel 3.1 Tabel kondisi pembangkit interrupt
A B INT 1
A
C B
Ultrasonik input
0 0 0
0 1 1
1 0 1
1 1 1
III.3.2. Blok rangkaian mikrokontroler
Jenis mikrokontroler yang digunakan adalah AT89C52 yang memiliki
empat buah port I/O, yaitu:
1. P0 (pin 32 sampai pin 39)
2. P1 (pin 1 sampai pin 8)
3. P2 (pin 21 sampai pin 28)
4. P3 (pin 10 sampai pin 17)
Pada perancangan alat ini penulis hanya menggunakan tiga port saja,
yaitu Port 0 berfungsi sebagai output. Pin yang digunakan yaitu pada P0.0
sampai P0.6. Kelima pin ini akan dihubungkan ke input dari IC untuk driver
motor dc. Kemudian Port 1 berfungsi sebagai input dari rangkaian sensor
ultrasonik. Masing-masing sensor menempati satu bit pada Port 1 yaitu P1.0,
P1.1, dan P1.2.
Yang ketiga adalah Port 3. Port ini adalah port khusus pada keluarga
8051, karena memiliki fungsi interrupt. Oleh karena perancangan alat ini
menggunakan rutin interrupt, maka kaki P3.3 (yang berfungsi sebagai INT 1)
dihubungkan ke output rangkaian pembangkit interrupt dari rangkaian sensor
Pada blok rangkaian dari mikrokontroler ini juga terdapat rangkaian
reset, yaitu jika kita mengeksekusi tombol yang ada, maka secara otomatis
address program dari mikrokontroler akan menuju ke alamat 0000H. Nilai
tersebut dinamakan sebagai vektor reset, yang merupakan nomor awal dari
memoriprogram yang menampung program agar dapat dijalankan. Dengan kata
lain akan kembali ke awal perintah atau program.
Perintah ini merupakan satu-satunya perintah yang tidak dapat dihalangi
oleh perintah lain. Pembahasan diatas memberkan gambaran bahwa proses reset
merupakan peristiswa perangkat keras (sinyal reset dihubungkan ke kaki reset
mikrokontroler) yang dipakai untuk mengatur kerja dari software, yakni
menentukan aliran proses program prosesor.
Selain rangkaian reset, juga terdapat rangkaian yang osilator. Ini
merupakan rangakain yang memicu CPU dan mikrokontroler untuk
mengerjakan satu intruksi ke instruksi berikutnya dalam proses yang berurutan.
Setiap langkah kecil dari operasi mikrokontroler membutuhkan waktu sebanyak
satu atau beberapa clock untuk melakukannya yang akan menentukan kecepatan
kerja dari mikrokontroler.
Program untuk mengendalikan kerja dari mikrokontroler disimpan
dalam memori program, yang merupakan kumpulan dari instruksi kerja
mikrokontroler. Sepanjang mikrokontroler bekerja, instruksi tersebut byte demi
byte akan diambil CPU dan selanjutnya dipakai untuk mengatur kerja
disebut fetch cycle dan saat CPU melaksanakan instruksi tersebu dinamakan
dengan demikian isi memori program bisa berurutan diberikan ke CPU.
Saat mikrokontroler di-reset, isi PC menjadi 0000H, artinya sesaat
setelah reset isi dari memori program nomor 0 dan seterusnya akan diambil ke
CPU dan diperlakukan sebagai instruksi yag akan mengatur kerja
mikrokontroler. Dengan demikian, awal dari program pengendali harus
ditempatkan di memori nomor 0, setelah reset mikrokontroler menjalankan
program mulai dari memori program 0000H, dengan melakukan fetch cycle
dabn execute cycle terus menerus tanpa henti.
Jika sarana interrupt diaktifkan, dan tegangan di kaki INT 1 merubah
dari 0 menjadi 1, maka proses menjalankan program diatas akan dihentikan
sebentar, kemudian mikrokontroler sendiri akan melayani dulu permintaan
interrupt, selesai melayani permintaan interrupt CPU akan melanjutkan
mengerjakan program utama lagi.
Gambar 3.5. Blok rangkaian mikrokontroler
III.3.3. Rangkaian penggerak motor DC
Untuk penggerak dari rangkaian roda pada robot menggunakan motor
dc. Pada motor dc sendiri tidak dapat dikendalikan langsung oleh keluaran dari
mikrokontroler. Tegangan mikrokontroler hanya sebesar 5 Volt, sedangkan
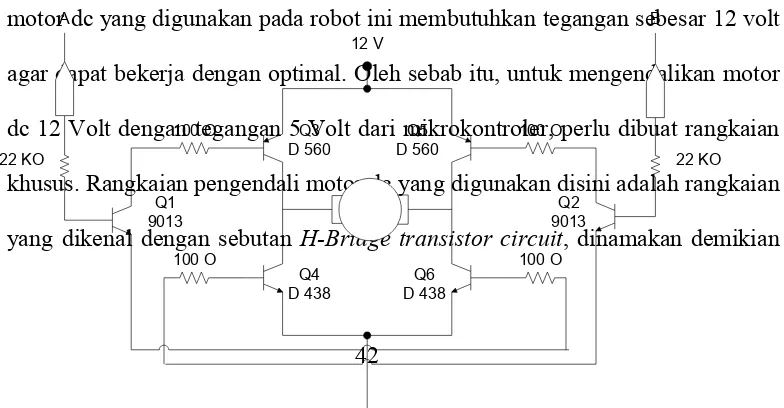
motor dc yang digunakan pada robot ini membutuhkan tegangan sebesar 12 volt
agar dapat bekerja dengan optimal. Oleh sebab itu, untuk mengendalikan motor
dc 12 Volt dengan tegangan 5 Volt dari mikrokontroler, perlu dibuat rangkaian
khusus. Rangkaian pengendali motor dc yang digunakan disini adalah rangkaian
yang dikenal dengan sebutan H-Bridge transistor circuit, dinamakan demikian
Q3 D 560
Q4
Q2 9013 Q1
9013
100 O 100 O 100 O
100 O
22 KO 22 KO
12 V
Q5 D 560
Q6
karena rangkaian transistor dan motor ini membentuk abjad H (gambar 3.6).
Rangkaian ini umum digunakan untuk mengatur putaran motor ke arah yang
diinginkan dengan memberikan logika Transistor-Transitor Logic (TTL) yang
sesuai dengan ketentuan pada kaki inputnya (tabel 3.2).
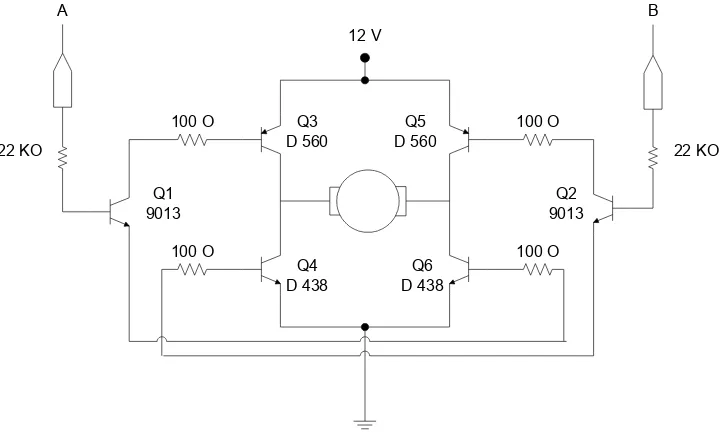
Gambar 3.6. Driver motor DC menggunakan rangkaian H-Bridge
Rangkaian penguat ini digunakan untuk mengatur putaran motor dc ke
arah kanan atau kiri. Perputaran motor dc ini diatur dengan merubah polaritas
dari tegangan yang bekerja pada motor dc.
Jika titik A diberi input, maka transistor Q1 akan aktif, yang akan
membuat transistor Q3 dan Q6 juga aktif. Q3 akan menghubungkan titik C pada
motor ke +12 volt, dan Q6 menghubungkan ke ground. Dari sini pergerakan
Q3 D 560
Q4 D 438
Q2 9013 Q1
9013
100 O 100 O 100 O
100 O
22 KO 22 KO
12 V
Q5 D 560
Q6 D 438
putaran motor akan searah dengan jarum jam. Jika titik A tidak diberi input
maka Q1, Q3 dan Q6 tidak akan menghantar, sehingga motor tidak akan
bergerak.
Kemudian sebaliknya jika titik B yang diberi input maka transistor Q2,
Q4, dan Q5 akan aktif. Dengan transistor pada Q5 yang akan mendapat
tegangan +12 volt dan transistor Q4 yang akan terhubung ke ground. Dengan
kondisi seperti ini, maka motor akan berputar berlawanan dengan jarum jam.
Dari rangkaian ini pula tidak diperbolehkan untuk mengaktifkan A dan
B secara bersamaan. Jika hal tersebut dilakukan, maka akan terjadi hubungan
singkat/korsleting. Dengan adanya hal seperti ini maka akan dapat merusak
rangkaian H-Bridge ini, bahkan keseluruhan sistem.
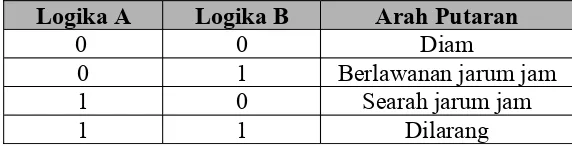
Tabel 3.2 Kondisi putaran motor
Logika A Logika B Arah Putaran
0 0 Diam
0 1 Berlawanan jarum jam
1 0 Searah jarum jam
1 1 Dilarang
Pada penelitian ini penulis mengganti rangkaian H-Bridge dengan
sebuah komponen Integrated Circuit (IC) L293D. IC ini mempunyai fungsi
yang sama dengan rangkaian H-Bridge. Gambar 3.7 menunjukkan konfigurasi
Gambar 3.7. Alokasi pin IC L293D
Dari gambar diatas dapat diketahui bahwa IC ini mempunyai dua buah
sumber tegangan, yaitu 5 volt untuk mengaktifkan IC yang terdapat pada pin 16
dan sumber tegangan 12 volt pada pin 8 yang berfungsi untuk menggerakkan
motor dc. Pada pin 1 dan pin 9 berfungsi untuk meng-enable kan
masing-masing motor. Sebab dalam rangkaian robot ini menggunakan dua buah motor
dc. Pin 1 sebagai enable (EN1) untuk motor 1 dan pin 9 sebagai enable (EN2)
untuk motor 2.
Kemudian dari IC untuk driver motor dc ini setiap pin yang berfungsi
sebagai input akan dihubungkan ke output dari mikrokontroler pada port 0
untuk menggerakkan arah putaran motor sesuai dengan data yang dikeluarkan
Gambar 3.8. Koneksi IC L293D dengan output dari mikrokontroler AT89C52
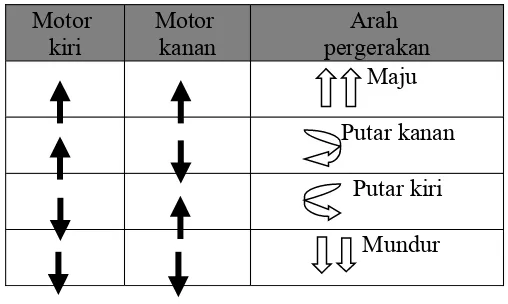
Berikut adalah tabel kondisi putaran motor dc terhadap arah pergerakan
robot, yaitu:
Tabel 3.3. Kondisi putaran motor terhadap arah pergerakan robot
Motor kiri
Motor kanan
Arah pergerakan
Maju
Putar kanan
Putar kiri
Mundur
III.3.4. Blok Rangkaian Catu Daya
Dari keseluruhan rangkaian ini menggunakan tiga buah level tegangan,
yaitu 5 volt yang digunakan untuk tegangan pada mikrokontroler dan, 9 volt
tegangan 12 volt untuk tegangan pada blok rangkaian receiver sensor ultrasonic
dan pada rangkaian penggerak motor dc yang terdapat pada IC L293D.
Sebagai sumber tegangan mengunakan baterai sebesar 1,5 volt sebanyak
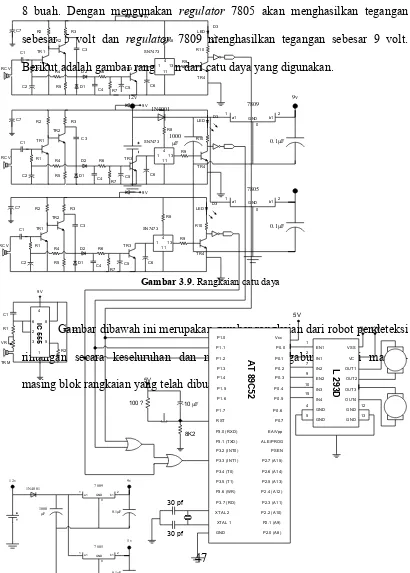
8 buah. Dengan mengunakan regulator 7805 akan menghasilkan tegangan
sebesar 5 volt dan regulator 7809 menghasilkan tegangan sebesar 9 volt.
Berikut adalah gambar rangkaian dari catu daya yang digunakan.
Gambar 3.9. Rangkaian catu daya
Gambar dibawah ini merupakan gambar rangkaian dari robot pendeteksi
rintangan secara keseluruhan dan merupakan penggabungan dari
masing-masing blok rangkaian yang telah dibuat diatas tadi.
Gambar 3.9. Gambar rangkaian secara keseluruhan
III.4. Perancangan Perangkat Lunak
Dalam perancangan alat ini, bahasa yang digunakan oleh penulis adalah
bahasa Assembler dengan bantuan software IDE 8051 yang dapat dijalankan pada
Gambar 3.10. Tampilan dari software IDE 8051
Software ini dapat berfungsi sebagai editor dan simulator dari program
yang telah kita buat. Software ini akan menampilkan isi dari accumulator,
program counter, stack pointer, register-register , dan port pada saat program
buatan kita sedang dijalankan. Dengan demikian kita dapat mengetahui apakah
program yang telah kita buat sudah benar atau belum. Bila belum benar,
program dapat diperbaiki secara langsung dari software IDE 8051 ini. Bagi
program yang telah di-compile maka akan terdapat dua jenis file, yaitu file
berekstension LST, contohnya program.LST (gambar 3.10) dan file yang
Gambar 3.11. Tampilan program yang memiliki ekstension LST
Gambar 3.12. Tampilan program yang memiliki ekstension HEX.
Untuk men-download program, file yang kita butuhkan adalah yang
download pada EPROM writer, berikut adalah tampilan dari software untuk
menjalankan EPROM writer, yaitu:
Gambar 3.13. Tampilan software WACESS untuk men-download program
III.5.`Flowchart program
Dalam setiap pembuatan suatu alat, hal terpenting yang paling utama dalam
perancangannya adalah bagaimana kita dapat mengetahui prinsip kerja dari alat yang
dapat digambarkan dalam bentuk flowchart. Gambar dibawah adalah flowchart
program secara keseluruhan dari pembuatan alat ini.
51
DETEKSI TRACK START
INISIALISASI INTERUPSI
ROBOT TIDAK BERGERAK
SUBRUTINE DETEKSI TRACK YA
TIDAK TRACK
TERDETEKSI ?? ROBOT
BERGERAK MENGIKUTI TRACK
Gambar 3.14. Flowchart program keseluruhan
Program utama dari pembuatan robot ini adalah mendeteksi adanya input dari
sensor ultrasonic kepada mikrokontroler AT89C52 yang terletak pada P0.0, P0.1,
dan P0.2. Program akan bereaksi dengan mengirimkan output kepada driver motor dc
sesuai dengan data yang diterimanya. Motor dc akan bergerak jika input dari sensor
akan memiliki logka 1 (high).
Untuk pengecekan bit pada program pendeteksi sinyal dalam bahasa
Assembler menggunakan perintah Jump if Bit Set (JB). Perintah ini akan bekerja
dengan cara mengecek kondisi bit satu dari masing-masing sensor yang terhubung ke
port dari input dari mikrokontroler. Yang kemudian akan berpindah ke bagian label
diperiksa tersebut bernilai HIGH (1). Jika bit yang diperiksa bernilai LOW (0), maka
program akan melaksanakan baris perintah setelah perintah JB tersebut.
Cara kerja dari program secara keseluruhan adalah sebagai berikut:
1. Yang pertama adalah inisialisasi interupsi, yaitu INT1.
Inisialisasi interupsi dilakukan pada register IE. Dimana untuk mengaktifkan
INT1 maka pada program harus diberikan perintah MOV IE, #84H.
2. Jika sensor mendeteksi adanya halangan baik yang ada di sisi
depan, kiri, maupun sisi depan robot maka interupsi akan aktif dan menuju
subroutine sensor. Selanjutnya akan mencari sensor mana yang akan mengalami
perubahan pada masukannya. Sensor yang pertama kali dicek adalah yang
terhubung dengan P0.0 pada mikrokontroler, selanjutnya P0.1 dan P0.2. Jika ada
sensor yang terdeteksi maka data yang mengalami perubahan akan diberikan ke
driver penggerak motor yang selanjutnya roda dari robot akan berputar sesuai
dengan input sinyal dari sensor kepada mikrokontroler.
3. Subroutine dari motor berisi perintah mengeluarkan output
berupa arah putaran roda dari robot (tabel 3.4).
SU.2 SU.1 SU.0 Kondisi putaran motor
0 0 0 Stop
0 0 1 Kiri
0 1 0 Mundur
0 1 1 Kiri
1 0 0 Kanan
1 0 1 Maju
1 1 0 Kanan
1 1 1 Mundur
4. Kondisi ini akan berlangsung secara terus menerus sampai batas
akhir dari track.
5. Selanjutnya program akan kembali ke program utama jika tidak
ada lagi interupsi yang diterima oleh sensor.
Dari penjelasan flowchart pada gambar 3.14 diatas, maka dalam perancangan
alat ini terdapat dua program pengendali, yaitu:
1. Program deteksi rintangan
Sensor ultrasonic akan mendeteksi adanya objek yang menghalangi pergerakan
dari robot, baik yang ada di samping kanan, kiri maupun sisi depan. Program ini
menggunakan fasilitas interupsi 1 (INT1). Dibawah ini adalah flowchart dari
Gambar 3.15. Flowchart program deteksi rintangan
Program ini akan mengecek kondisi bit satu per satu dimulai dari P0.0 yang
terhubung ke sensor ultrasonic kiri, selanjutnya akan mengecek sensor ultrasonic
depan. Proses ini berlangsung terus-menerus sesuai dengan flowchart diatas.
Hingga terdapat hasil akhir yang akan mempengaruhi kondisi putaran dan arah
* * * * * * * * * * * * * * * * * * program deteksi sensor * * * * * * * * * * * * * * * * * * *
SCAN:
K: JB SU_1, D ; cek sensor kanan
; SU = xx1, cek sensor depan
KD: JB SU_2, Q ; cek sensor kanan depan
; SU = x10, cek sensor kiri
KDQ: JB SU_3, SCAN_KANAN ; cek sensor kanan depan kiri
; SU = 100, KANAN
LJMP SCAN_STOP ; SU = 000, STOP
D: JB SU_2, DQQ ; cek sensor depan
; SU = x11, cek sensor depan kiri kiri
DQ: JB SU_3, SCAN_MAJU ; cek sensor depan kiri
; SU = 101, MAJU
LJMP SCAN_KIRI ; SU = 001, KIRI
DQQ: JB SU_3, SCAN_MUNDUR ; cek sensor depan kiri kiri
; SU = 111, MUNDUR
LJMP SCAN_KIRI ; SU = 011, KIRI
Q: JB SU_3, SCAN_KANAN ; cek sensor kiri
; SU = 110, KANAN
LJMP MUNDUR ; SU = 010, MUNDUR
OUT: RETI
2. Program pengendali motor
Untuk program pengendali arah putaran motor ini dihasilkan dari adanya input
dari sensor. Program ini berisi bit 0 dan 1 yang konfigurasi masing-masing bitnya
sudah diprogram dan ditentukan dari output IC L293D sebagai driver motor.
Berikut adalah subroutine dari program pengendali motor.
* * * * * * * * * * program motor * * * * * * * * * *
KANAN: MOV MDC, #00011011b
ACALL DELAY
RET
KIRI: MOV MDC, #00101101b
ACALL DELAY
RET
MAJU: MOV MDC, #00101011b
ACALL DELAY
MUNDUR: MOV MDC, #00011101b
ACALL DELAY