SISTEM PERALATAN INFORMASI PERINGATAN
KECEPATAN MAKSIMUM PADA KENDARAAN BERMOTOR MENGGUNAKAN MP3
TUGAS AKHIR
YUANESTA SEBAYANG 172408030
PROGRAM STUDI D3 FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2020
SISTEM PERALATAN INFORMASI PERINGATAN
KECEPATAN MAKSIMUM PADA KENDARAAN BERMOTOR MENGGUNAKAN MP3
TUGAS AKHIR
DIAJUKAN UNTUK MELENGKAPI TUGAS DAN MEMENUHI SYARAT MEMPEROLEH GELAR AHLI MADYA
YUANESTA SEBAYANG 172408030
PROGRAM STUDI D3 FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2020
SISTEM PERALATAN INFORMASI PERINGATAN KECEPATAN MAKSIMUM PADA KENDARAAN BERMOTOR MENGGUNAKAN MP3
ABSTRAK
Kemajuan ilmu pengetahuan dan teknologi mendukung perkembangan alat transportasi secara pesat, sehingga menyebabkan laju pertumbuhan kendaraan semakin meningkat. Di era modern seperti sekarang ini, bidang transportasi berperan penting dalam kesejahteraan masyarakat sehingga mendukung pertumbuhan di berbagai bidang. Perkembangan kendaraan sebagai alat transportasi membawa dampak positif bagi pemenuhan dan peningkatan kesejahteraan manusia, terutama sebagai alat mobilisasi guna memperlancar aktivitas sehari-hari. Namun hal ini juga diiringi dengan timbulnya beberapa dampak negatif yang tidak diinginkan, seperti kemacetan dan meningkatnya angka kecelakaan lalu lintas. Desain Sistem Peralatan Informasi Kecepatan Maksimum Pada Kendaraan Bermotor adalah alat yang berfungsi untuk memperingati dan mendeteksi kecepatan kendaraan agar tidak melewati batas yang telah ditentukan. Jika kecepatan kendaraan melebihi batas yang telah ditentukan, maka alarm akan berbunyi.
Kata Kunci : Kendaraan Bermotor, Sensor Kecepatan, Alarm
INFORMATION SYSTEMS MAXIMUM SPEED WARNING INFORMATION ON MOTOR VEHICLES USING MP3
ABSTRACT
Advances in science and technology support the development of transportation equipment rapidly, causing the vehicle growth rate to increase. In the modern era as it is now, the field of transportation plays an important role in the welfare of society so that it supports growth in various fields. The development of vehicles as a means of transportation has a positive impact on the fulfillment and improvement of human welfare, especially as a means of mobilization in order to facilitate daily activities.
But this is also accompanied by the emergence of several undesirable negative impacts, such as congestion and increasing numbers of traffic accidents. System Design of Maximum Speed Information Equipment on Motor Vehicles is a tool that serves to commemorate and detect vehicle speeds so as not to exceed specified limits.
If the vehicle speed exceeds a predetermined limit, the alarm will sound.
Keywords: Motorized Vehicles, Speed Sensors, Alarms
KATA PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Pemurah dan Maha Penyayang, dengan limpah karunia-Nya penulis dapat menyelesaikan penyusunan laporan praktik proyek ini dengan judul Desain Sistem Peralatan Informasi Peringatan Kecepatan Maksimum Pada Kendaraan Bermotor Menggunakan MP3.
Ucapan terimakasih penulis sampaikan kepada berbagai pihak yang telah banyak membantu penulis dalam menyelesaikan laporan praktik proyek ini yaitu Kepada:
1. Bapak Dr. Kerista Sebayang, MS selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
2. Bapak Drs. Takdir Tamba,M.Eng.Sc selaku Ketua Program Studi D-III Fisika Fakultas MIPA Universitas Sumatera Utara.
3. Bapak Junedi Ginting,S.Si,M.Si selaku Pembimbing yang telah membimbing dan mengarahkan Kepada Penulis dalam menyelesaikan Tugas Akhir.
4. Seluruh staf pengajar/Pegawai Program Studi Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
5. Orangtua tercinta yang telah memberikan bantuan berupa dukungan moral dan material yang sangat membantu dalam menyelesaikan Laporan Proyek.
6. Senior kami Andika Siregar yang telah memberikan bantuan berupa Ilmu dan Motivasi dalam menyelesaikan Tugas Akhir.
7. Sahabat saya Alexis Rio Tarigan, Evander Johanis Lumbangaul Wildo Cahya Ashidiqi Tambunan, Demi Suranta Tarigan, Hendra Syahputra, Todi Ramadhan Zalukhu, Edoardo Sitepu, Edo Sedek Purba, Vicky Ghaneza Ginting, Fery Crystint Perangin-angin, Lusia Sinaga, Christin Petra Sihombing, Elisa Parhusip, Hendrianto Nainggolan, Jeremia Ginting, Nicho Purba, Andre Silalahi dan adik-adik saya Agriva Ananta Sebayang, Prima Surbakti, Thria Eria Putri Ginting, Vonda Bangun yang
DAFTAR ISI
Halaman
PERNYATAAN ORISINALITAS i
PENGESAHAN TUGAS AKHIR ii
ABSTRAK iii
ABSTRACT iv
PENGHARGAAN v
DAFTAR ISI vii
DAFTAR TABEL viii
DAFTAR GAMBAR ix
DAFTAR LAMPIRAN x
BAB 1 PENDAHULUAN 1
1.1 Latar Belakang 1
1.2 Rumusan Masalah 2
1.3 Tujuan 2
1.4 Batasan Masalah 2
1.5 Sistematika Penulisan 2
BAB 2 LANDASAN TEORI 4
2.1 Definisi Kecelakaan 4
2.2 Penyebab Kecelakaan 4
2.3 Mikrokontroler 5
2.3.1 Mikrokontroler ATMega 328 5
2.3.2 Arsitektur dan Konfigurasi pin ATMega 328 7
2.3.3 Konfigurasi Pin ATMega 328 7
2.3.4 Konstruksi Mikrokontroler ATMega 328 11
2.3.5 Komunikasi Serial Pada ATmega 328 12
2.3.6 Status Register 328 12
2.3.7 Daya 14
2.4 Liquid Crystal Display (LCD) 14
2.4.1 Konfigurasi Pin Liquid Crystal Display (LCD) 16
2.5 Buzzer 18
2.6 Sensor Kecepatan (RPM) 19
2.7 Modul MP3 YX5300 20
2.8 Bahasa Pemrograman C 20
2.8.1 Struktur Bahasa C 22
2.8.2 Pengenal 22
2.8.3 Tipe Data 22
2.8.4 Konstanta dan Variabel 25
2.9 Motor DC 25
2.9.1 Prinsip Kerja Motor DC 25
2.10 Power Supply Adaptor (PSA) 27
2.10.1 Prinsip Kerja DC Power Supply (Adaptor) 27 2.10.2 Rangkaian Sederhana DC Power Supply (Adaptor) 29
BAB 3 PERANCANGAN DAN PEMBUATAN SISTEM 30
3.1 Metodologi Perancangan 30
3.1.1 Tahap Persiapan 30
3.1.2 Tahap Pembuatan Sistem 31
3.1.3 Tahap Pengukuran, Analisis dan Kesimpulan 31
3.2 Perancangan Sistem 32
3.2.1 Diagram Blok Sistem 32
3.2.2 Perancangan Rangkaian 33
3.2.3 Perancangan Perangkat Lunak Sistem 38
3.3 Pengujian Rangkaian dan Pengukuran Hasil Sistem 39
3.3.1 Pengujian Mikrokontroler 39
3.3.2 Pengujian LCD 39
3.3.3 Pengujian Buzzer 40
3.3.4 Pengujian Sensor Kecepatan (RPM) 42
3.3.5 Pengujian Modul MP3 44
3.3.6 Pengujian Power Supply 48
3.3.7 Pengujian Motor DC 48
BAB 4 PEMBAHASAN HASIL DAN PENGUKURAN 50
4.1 Pengukuran dan Hasil Pengukuran Sistem 50
4.2 Analisis dan Pembahasan 50
BAB 5 PENUTUP 51
5.1 Kesimpulan 51
5.2 Saran 52
DAFTAR PUSTAKA 53
DAFTAR TABEL
Nomor Judul Halaman
Tabel
2.1 Spesifikasi Keluarga AVR 6
2.2 Konfigurasi Port B 8
2.3 Konfigurasi Port C 9
2.4 Konfigurasi Port D 10
2.5 Konfigurasi Pin LCD 16
2.6 Tipe Data 24
3.1 Keadaan Sensor Kecepatan 43
3.2 Logika Motor DC 49
4.1 Pengukuran Kecepatan dan RPM terhadap MP3 50
DAFTAR GAMBAR
Nomor Judul Halaman
Gambar
2.1 Arsitektur ATMega328X 7
2.2 Konfigurasi Pin ATMega 328 7
2.3 Peta Memori Mikrokontroler AVR 11
2.4 Status Register ATMega 328 12
2.5 LCD 2x16 15
2.6 Konfigurasi LCD 16
2.7 Buzzer 19
2.8 Sensor Kecepatan (RPM) 20
2.9 Modul MP3 YX5300 20
2.10 Motor DC 25
2.11 Prinsip Kerja Motor DC 26
2.12 Diagram Blok DC Power Supply 27
2.13 Transformator/ Trafo Step Down 28
2.14 Rectifier (Penyearah) 28
2.15 Filter (Penyaring) 29
2.16 Voltage Regulator (Pengatur Tegangan) 29
2.17 Rangkaian Sederhana DC Power Supply 29
3.1 Diagram Blok Proyek 33
3.2 Rangkaian Mikrokontroler ATMega 328 33
3.3 Rangkaian Sensor Kecepatan RPM 34
3.4 Rangkaian Power Supply 34
3.5 Rangkaian Buzzer 35
3.6 Rangkaian LCD 36
3.7 Rangkaian Driver Motor DC 37
3.8 FlowChart Sistem 38
3.9 Pengujian Rangkaian LCD 40
3.10 Rangkaian Octocoupler dan LM393 42
3.11 Kondisi Sensor Tidak Terhalang 43
3.12 Kondisi Sensor Terhalang Oleh Kertas 43
3.13 Rangkaian Power Supply 48
3.14 Rangkaian Driver Motor DC 48
1 BAB 1 PENDAHULUAN
1.1 Latar Belakang
Kemajuan teknologi yang semakin pesat dan canggih telah membawa dampak yang sangat besar dalam kehidupan. Hal ini disebabkan oleh kebutuhan hidup manusia dari waktu ke waktu yang semakin kompleks, sehingga memicu pola pikir manusia untuk dapat menciptakan inovasi-inovasi baru dalam berbagai bidang, salah satunya dalam bidang transportasi. Di era modern seperti sekarang ini, bidang transportasi berperan penting dalam kesejahteraan masyarakat sehingga mendukung pertumbuhan di berbagai bidang. Perkembangan kendaraan sebagai alat transportasi membawa dampak positif bagi pemenuhan dan peningkatan kesejahteraan manusia, terutama sebagai alat mobilisasi guna memperlancar aktivitas sehari-hari. Namun hal ini juga diiringi dengan timbulnya beberapa dampak negatif yang tidak diinginkan, seperti kemacetan dan meningkatnya angka kecelakaan lalu lintas. Faktor manusia adalah faktor yang terbesar dari faktor kecelakaan lalu lintas lainnya. Kendaraan bermotor yang digunakan di Indonesia sudah memiliki SNI (Standar Nasional Indonesia) yang merupakan syarat utama dalam izin kendaraan bermotor yang layak digunakan sebagai alat transportasi. Walaupun demikian, masih ada masyarakat yang belum menggunakan kendaraan bermotor tersebut sesuai aturan berlalu lintas di jalan raya sehingga sering mengakibatkan terjadinya kecelakaan lalu lintas. Berdasarakan data Polri, terdapat 107.500 peristiwa kecelakaan lalu lintas. Semakin tingginya tingkat kecelakaan akibat kelalaian pengguna kendaraan. Oleh karena itu, judul dari tugas akhir ini adalah “Desain Sistem Peralatan Informasi Peringatan Kecepatan Maksimum Pada Kendaraan Bermotor” yang berfungsi untuk memperingati dan mendeteksi kecepatan kendaraan agar tidak melewati batas yang telah ditentukan.
Jika kecepatan kendaraan melebihi batas yang telah ditentukan, maka alarm akan berbunyi. Seperti yang telah ditetapkan dalam Undang-undang Republik Indonesia (RI) no 22 tahun 2009 tentang lalu lintas dan angkutan jalan pada Pasal 21 ayat 4 yang berbunyi “Batas kecepatan paling rendah pada jalan bebas hambatan ditetapkan dengan batas absolut 60 kilometer per jam dalam kondisi arus bebas”.
1.2 Rumusan Masalah
Berdasarkan uraian diatas, maka permasalahan yang dikaji adalah sebagai berikut:
1. Bagaimana prinsip kerja dari sistem peralatan informasi peringatan kecepatan maksimum pada kendaraan bermotor.
2. Bagaimana mengaplikasikan mikrokontroler Atmega328 sebagai pengontrol semua sistem pada alat peringatan kecepatan maksimum pada kendaraan bermotor.
3. Bagaimana rancang bangun desain sistem peralatan infomtasi peringatan kecepatan maksimum pada kendaraan bermotor.
1.3 Tujuan
1. Untuk mengetahui dan memahami mikrokontroler Atmega328 secara umum, sensor yang digunakan, serta komponen yang terdapat pada pembuatan alat.
2. Untuk mengetahu prinsip kerja dari sistem peralatan informasi peringatan kecepatan maksimum pada kendaraan bermotor.
3. Untuk menekan angka tinggat kecelakaan berkendara pada kendaraan bermotor dengan mengaplikasikan alat ini dalam kehidupan sehari-hari.
1.4 Batasan Masalah
Dalam perancangan dan pembuatan tugas akhir ini di berikan batasan masalah sebagai berikut :
1. Sensor yang digunakan adalah sensor kecepatan
2. Mikrokontroler Atmega328 sebagai semua pengontrol sistem pada alat peringatan kecepatan maksimum pada kendaraan bermotor.
3. Alat ini digunakan untuk mengurangi angka kecelakaan pada pengendara kendaraan bermotor.
1.5 Sistematika Penulisan
Untuk mempermudah penyusun laporan serta memahami tentang sistematika kinerja dari SISTEM PERALATAN INFORMASI PERINGATAN KECEPATAN MAKSIMUM PADA KENDARAAN BERMOTOR MENGGUNAKAN MP3, maka
dalam hal ini penulis membagi dalam beberapa bab, serta memberikan gambaran secara garis besar isi dari tiap-tiap bab sebagai berikut :
BAB 1 : PENDAHULUAN
Bab ini berisikan pendahuluan yaitu membahas mengenai latar belakang, rumusan masalah , tujuan, batasan masalah, serta
sistematika penulisan.
BAB 2 : LANDASAN TEORI
Bab ini merupakan landasan teori yang membahas tentang teori-teori yang mendukung dalam penyelesaian masalah.
BAB 3 : PERANCANGAN DAN PEMBUATAN SISTEM
Bab ini membahas tentang sistem perancangan alat yaitu diagram blok dari rangkaian, sistematik dan kerja dari setiap rangkaian
BAB 4 : PEMBAHASAN HASIL PENGUKURAN
Bab ini membahas hasil analisa dari rangkaian dan sistem kerja alat, penjelasan mengenai rangkaian-rangkaian yang digunakan.
BAB 5 : PENUTUP
Bab ini menjelaskan tentang kesimpulan dari pengujian dan saran masukan untuk mengembangkan dan melengkapi sistem yang sudah dibangun untuk masa yang mendatang
DAFTAR PUSTAKA
4 BAB 2
LANDASAN TEORI 2.1 Definisi Kecelakaan
Pengertian kecelakaan menurut Heinrich (1980) yaitu mendefinisikan kecelakaan sebagai suatu kejadian yang tidak terencana dan tidak terkontrol yang merupakan aksi atau reaksi dari suatu objek, substansi, manusia, atau radiasi yang memungkinkan atau dapat menyebabkan Cedera. Kecelakaan didefinisikan sebagai suatu kejadian yang tak terduga, semula tidak dikehendaki yang mengacaukan proses yang telah diatur dari suatu aktivitas dan dapat menimbulkan kerugian baik bagi manusia dan atau harta benda, Sedangkan kecelakaan kerja adalah kejadian yang tak terduga dan tidak diharapkan dan tidak terencana yang mengakibatkan luka, sakit, kerugian baik pada manusia, barang maupun lingkungan. Kerugian-kerugian yang disebabkan oleh kecelakaan dapat berupa banyak hal yang mana telah dikelompokkan menjadi lima, yaitu : Kerusakan, Kekacauan, Keluhan kesakitan dan kesedihan, Kelainan dan cacat, Kematian. Orang yang ditimpa kecelakaan mengeluh dan menderita, sedangkan keluarga dan kawan-kawan sekerja akan bersedih hati, kecelakaan tidak jarang berakibat luka-luka, terjadinya kelainan tubuh dan cacat, bahkan tidak jarang kecelakaan merenggut nyawa dan berakibat kematian. Menurut Per 03/Men/1994 Bab I pasal 1 butir 7 mengenai Program JAMSOSTEK, pengertian kecelakaan kerja adalah kecelakaan berhubung dengan hubungan kerja, termasuk penyakit yang timbul karena hubungan kerja demikian pula kecelakaan yang terjadi dalam perjalanan berangkat dari rumah menuju tempat kerja dan pulang ke rumah melalui jalan biasa atau wajar dilalui.
2.2 Penyebab Kecelakaan
Menurut jusri Pulubuhu, Instruktur Kepala dari Jakarta Defensive Driving Consulting (JDDC), mengungkapkan ada beberapa faktor yang menyebabkan kecelakaan sepeda motor dapat terjadi. Pertama, adalah kurangnya konsentrasi saat di jalan raya. Pengendara sepeda motor sering melakukan kegiatan berkendara sembari melakukan kegiatan lain. Misalnya, melakukan panggilan telepon saat berkendara, melamun, serta mendengarkan lagu saat berkendara. Kedua adalah berperilaku tidak tertib. Pengendara kendaraan bermotor terlibat dalam aktivitas yang tidak mematuhi peraturan misalnya melawan arus, tidak menggunakan helm, serta
menerobos lampu merah. Perilaku tidak tertib ini sudah menjadi suatu hal yang biasa dilakukan sehingga kemungkinan terlibat kecelakaan semakin besar. Ketiga, menurut statistik kementerian perhubungan indonesia, 70 persen kecelakaan terjadi saat melakukan aksi mendahului kendaraan. Hal ini terjadi karena pengendara tidak mampu memperkirakan hal-hal yang dapat terjadi setelah melewati sebuah kendaraan. Pencegahan masalah ini adalah untuk dapat menahan diri tidak mendahului kendaraan saat tidak yakin mengenai situasi jalan di depan. Faktor keempat adalah terlalu cepat mengendarai kendaraan. Kendaraan yang terlalu cepat akan lebih banyak berpotensi mengalami kecelakaan. Faktor kelima adalah empati, banyak pengendara motor di Indonesia memilih untuk meladeni atau memberikan perhatian kepada pengendara lain yang bermasalah. Hal seperti ini pada akhirnya akan menyebabkan kerugian bagi diri sendiri serta orang lain. Kecelakaan lalu lintas saat ini menjadi penyebab kematian nomor dua terbesar di dunia dan tidak memilih korban. Faktor penyebab ini juga bisa terjadi pada pengendara mobil. Saat di jalan raya pastikan untuk berpikir dapat tiba di tempat tujuan dengan selamat dan melakukan langkah-langkah pencegahan kecelakaan.
2.3 Mikrokontroler
Mikrokontroler adalah sebuah sistem komputer lengkap dalam satu serpih (chip) yang biasanya digunakan untuk sebuah embedded system (sistem yang dibentuk guna menjelaskan satu atau lebih dari suatu fungsi tertentu secara real time).
Mikrokontroler biasanya berukuran kecil karena didesain hanya untuk satu funngsi tertentu pada suatu sistem. Pemanfaatan mikrokontroler umumnya digunakan di bidang kendali dan insrtumentasi elektronik. Mikrokontroler lebih dari sekedar sebuah mikroprosesor karena sebuah terdapat atau berisikan ROM (Read-Omly Memory), RAM (Read-Write Memory), beberapa Port masukan maupun keluaran dan beberapa peripherial seperti pencacah/pewaktu, ADC (Analog to Digital Converter), DAC (Digital to Analog Converter) dan serial komunikasi.
2.3.1 Mikrokontroler ATMega328
ATMega 328 adalah mikrokontroller keluaran dari atmel yang mempunyai arsitektur RISC (Reduce Instruction Set Computer) yang dimana setiap proses eksekusi data lebih cepat dari pada arsitektur CISC (Completed Instruction Set
Computer). Mikrokontroller ATmega 328 memiliki arsitektur Harvard, yaitu memisahkan memori untuk kode program dan memori untuk data sehingga dapat memaksimalkan kerja dan parallelism. Instruksi –instruksi dalam memori program dieksekusi dalam satu alur tunggal, dimana pada saat satu instruksi dikerjakan instruksi berikutnya sudah diambil dari memori program.
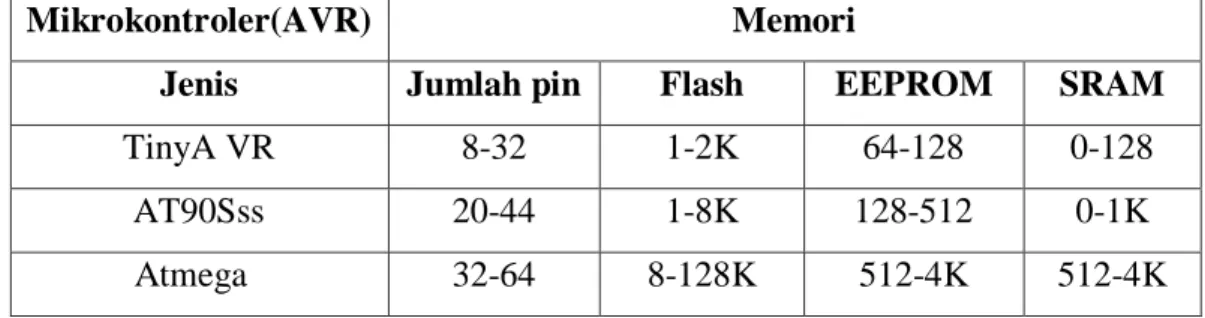
Tabel 2.1 Spesifikasi Keluarga AVR
Mikrokontroler(AVR) Memori
Jenis Jumlah pin Flash EEPROM SRAM
TinyA VR 8-32 1-2K 64-128 0-128
AT90Sss 20-44 1-8K 128-512 0-1K
Atmega 32-64 8-128K 512-4K 512-4K
Adapun Fitur AVR dari ATMega 328 yaitu sebagai berikut dibawah ini:
1. 130 macam instruksi yang hampir semuanya dieksekusi dalam satu siklus clock.
2. 32 x 8-bit register serba guna.
3. Kecepatan mencapai 16 MIPS dengan clock 16 MHz.
4. 32 KB Flash memory dan pada arduino memiliki bootloader yang menggunakan 2 KB dari flash memori sebagai bootloader.
5. Memiliki EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 1KB sebagai tempat penyimpanan data semi permanent karena EEPROM tetap dapat menyimpan data meskipun catu daya dimatikan.
6. Memiliki SRAM (Static Random Access Memory) sebesar 2KB.
7. Memiliki pin I/O digital sebanyak 14 pin 6 diantaranya PWM (Pulse Width Modulation) output.
8. Master / Slave SPI Serial interface.
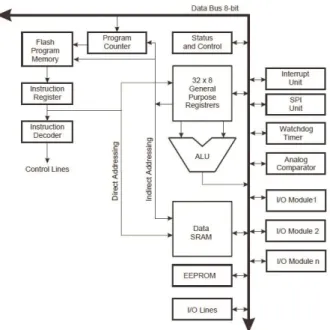
2.3.2 Arsitektur dan Konfigurasi pin ATMega 328 Berikut ini adalah tampilan arsitektur ATmega 328 :
Gambar 2.1 Arsitektur ATMega328
2.3.3 Konfigurasi Pin ATMega 328
Berikut ini adalah Konfigurasi Pin ATMega 328
Gambar 2.2 Konfigurasi Pin ATMega328
ATMega328 memiliki 3 buah PORT utama yaitu PORTB, PORTC, dan PORTD dengan total pin input/output sebanyak 23 pin. PORT tersebut dapat difungsikan sebagai input/output digital atau difungsikan sebagai periperal lainnya.
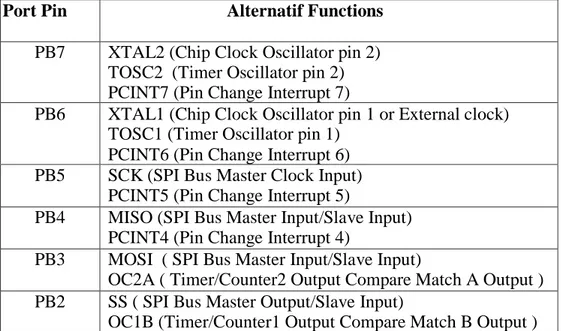
1. Port B
Port B merupakan jalur data 8 bit yang dapat difungsikan sebagai input/output. Selain itu Port B juga dapat memiliki fungsi alternatif seperti di bawah ini.
a. ICP1 (PB0), berfungsi sebagai Timer Counter 1 input capture pin.
b. OC1A (PB1), OC1B (PB2) dan OC2 (PB3) dapat difungsikan sebagai keluaran PWM (Pulse Width Modulation).
c. MOSI (PB3), MISO (PB4), SCK (PB5), SS (PB2) merupakan jalur komunikasi SPI.
d. Selain itu pin ini juga berfungsi sebagai jalur pemograman serial
e. TOSC1 (PB6) dan TOSC2 (PB7) dapat difungsikan sebagai sumber clock external untuk timer.
f. XTAL1 (PB6) dan XTAL2 (PB7) merupakan sumber clock utama mikrokontrole
Tabel 2.2 Konfigurasi Port B Port Pin Alternatif Functions
PB7 XTAL2 (Chip Clock Oscillator pin 2) TOSC2 (Timer Oscillator pin 2) PCINT7 (Pin Change Interrupt 7)
PB6 XTAL1 (Chip Clock Oscillator pin 1 or External clock) TOSC1 (Timer Oscillator pin 1)
PCINT6 (Pin Change Interrupt 6) PB5 SCK (SPI Bus Master Clock Input)
PCINT5 (Pin Change Interrupt 5)
PB4 MISO (SPI Bus Master Input/Slave Input) PCINT4 (Pin Change Interrupt 4)
PB3 MOSI ( SPI Bus Master Input/Slave Input)
OC2A ( Timer/Counter2 Output Compare Match A Output ) PB2 SS ( SPI Bus Master Output/Slave Input)
OC1B (Timer/Counter1 Output Compare Match B Output )
PB1 OC1A (Timer/Counter1 Output Compare Match A Output ) PCINT1 ( Pin Change Interrupt 1)
PB 0 ICP1 ( Timer/Counter1 Input Capture Input) CLKO ( Divided System Clock Output) PCINT0 ( Pin Change Interrupt 0) 2. Port C
Port C merupakan jalur data 7 bit yang dapat difungsikan sebagai input/output digital. Fungsi alternatif PORTC antara lain sebagai berikut.
a. ADC6 channel (PC0,PC1,PC2,PC3,PC4,PC5) dengan resolusi sebesar 10 bit. ADC dapat kita gunakan untuk mengubah input yang berupa tegangan analog menjadi data digital.
b. I2C (SDA dan SDL) merupakan salah satu fitur yang terdapat pada PORTC. I2C digunakan untuk komunikasi dengan sensor atau device lain yang memiliki komunikasi data tipe I2C seperti sensor kompas, accelerometer nunchuck.
Tabel 2.3 Konfigurasi Port C Port Pin Alternatif
Functions PC6 RESET ( Reset pin)
PCINT 14 (Pin Change Interrupt 14) PC5 ADC 5 (ADC Input Channel 5)
SCL (2-wire Serial Bus Clock Line) PCINT 13 (Pin Change Interrupt 13) PC4 ADC 4 (ADC Input Channel 4)
SDA (2-wire Serial Bus Data Input/Output Line) PCINT 12 (Pin Change Interrupt 12)
PC3 ADC 3 (ADC Input Channel 3) PCINT 11 (Pin Change Interrupt 11) PC2 ADC 2 ( ADC Input Channel 2)
PCINT 10 (Pin Change Interrupt 10) PC1 ADC 1 ( ADC Input Channel 1)
PCINT 9 (Pin Change Interrupt 9) PC0 ADC 0 ( ADC Input Channel 1)
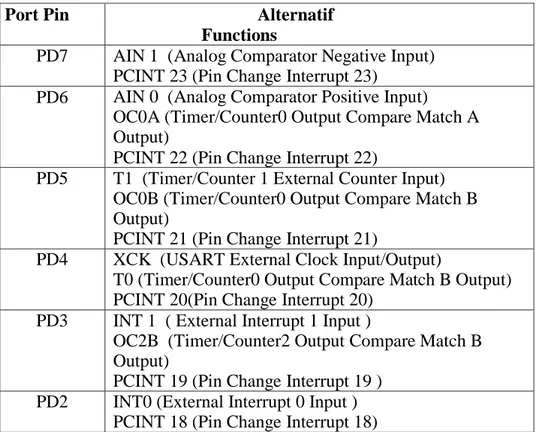
PCINT 8 (Pin Change Interrupt 8) 3. Port D
Port D merupakan jalur data 8 bit yang masing-masing pin-nya juga dapat difungsikan sebagai input/output. Sama seperti Port B dan Port C, Port D juga memiliki fungsi alternatif dibawah ini.
a. USART (TXD dan RXD) merupakan jalur data komunikasi
serial dengan level sinyal TTL. Pin TXD berfungsi untuk
mengirimkan data serial, sedangkan RXD kebalikannya yaitu sebagai pin yang berfungsi untuk menerima data serial.
b. Interrupt (INT0 dan INT1) merupakan pin dengan fungsi khusus sebagai interupsi hardware. Interupsi biasanya digunakan sebagai selaan dari program, misalkan pada saat program berjalan kemudian terjadi interupsi
hardware/software maka program utama akan berhenti dan akan menjalankan program interupsi.
c. XCK dapat difungsikan sebagai sumber clock external untuk USART, namun kita juga dapat memanfaatkan clock dari CPU, sehingga tidak perlu membutuhkan externalclock.
d. T0 dan T1 berfungsi sebagai masukan counter external untuk timer 1 dan timer 0.
e. AIN0 dan AIN1 keduanya merupakan masukan input untuk analog comparator.
Tabel 2.4 Konfigurasi Port D Port Pin Alternatif
Functions
PD7 AIN 1 (Analog Comparator Negative Input) PCINT 23 (Pin Change Interrupt 23)
PD6 AIN 0 (Analog Comparator Positive Input) OC0A (Timer/Counter0 Output Compare Match A Output)
PCINT 22 (Pin Change Interrupt 22)
PD5 T1 (Timer/Counter 1 External Counter Input) OC0B (Timer/Counter0 Output Compare Match B Output)
PCINT 21 (Pin Change Interrupt 21)
PD4 XCK (USART External Clock Input/Output)
T0 (Timer/Counter0 Output Compare Match B Output) PCINT 20(Pin Change Interrupt 20)
PD3 INT 1 ( External Interrupt 1 Input )
OC2B (Timer/Counter2 Output Compare Match B Output)
PCINT 19 (Pin Change Interrupt 19 ) PD2 INT0 (External Interrupt 0 Input )
PCINT 18 (Pin Change Interrupt 18)
PD1 TXD ( USART Output Pin )
PCINT 17 (Pin Change Interrupt 17) PD0 RXD ( USART Output Pin )
PCINT 16 (Pin Change Interrupt 16) 2.3.4 Konstruksi Mikrokontroler ATMega 328.
Mikrokontroler ATMega328 memiliki 3 jenis memori, yaitu memori program, memori data dan memori EEPROM. Ketiganya memiliki ruang sendiri dan terpisah.
1. Memori program ATmega328 memiliki kapasitas memori progam sebesar 8K byte yang terpetakan dari alamat 0x0000 –0x3FFF dimana masing-masing alamat memiliki lebar data 32 bit. Memori program ini terbagi menjadi 2 bagian yaitu bagian program boot dan bagian
program aplikasi.
2. Memori data Memori data ATmega328 terbagi menjadi 3 bagian yaitu register serba guna, register I/O dan SRAM. ATmega328 memiliki 32 register serba guna, 64 register I/O yang dapat diakses sebagai bagian dari memori RAM (menggunakan instuksi LD atau ST) atau dapat juga diakses sebagai I/O (menggunakan instruksi IN atau OUT), dan 2048 byte memori data SRAM.
3. Memori EEPROM ATmega328 memiliki memori EEPROM sebesar 1K byte yang terpisah dari memori program maupun memori data.
Memori EEPROM ini hanya dapat diakses dengan menggunakan register-register I/O yaitu register EEPROM Address, register EEPROM Data, dan register EEPROM Control. Untuk mengakses memori EEPROM ini diperlakukan seperti mengakses data eksternal, sehingga waktu eksekusinya relatif lebih lama bila dibandingkan dengan mengakses data dari SRAM.
Gambar 2.3 Peta Memori Mikrokontroller AVR
2.3.5 Komunikasi Serial Pada ATMega 328
Atmega328 menyediakan komunikasi serial UART TTL (5V) yang tersedia di pin 0 (RX) dan pin 1 (TX). Sebuah chip FTDI yang terdapat pada board berfungsi menterjemahkan bentuk komunikasi ini melalui USB dan akan tampil sebagai Virtual Port di komputer. Pada Arduino Software (IDE) terdapat monitor serial yang memudahkan data textual untuk dikirim menuju Arduino atau keluar dari Arduino.
Lampu led TX dan RX akan menyala berkedip-kedip ketika ada data yang ditransmisikan melalui chip FTDI USB to Serial via kabel USB ke komputer. Untuk menggunakan komunikasi serial dari digital pin, gunakan Software Serial library.
Chip ATmega328 juga mendukung komunikasi I2C (TWI) dan SPI. Di dalam Arduino Software (IDE) sudah termasuk Wire Library untuk memudahkan anda menggunakan bus I2C. Untuk menggunakan komunikasi SPI, gunakan SPI library.
2.3.6 Status Register 328
Pada AVR status register mengandung beberapa informasi mengenai hasil dari kebanyakan hasil eksekusi intruksiaritmatika. Informasi ini digunakan untuk Altering arus program sebagai kegunaan untuk meningkatkan performa pengoperasian. Register ini di-update setelah operasi ALU (Arithmetic Logis Unit) hal tersebut seperti yang tertulis dalam datasheet khususnya pada bagian intruction set reference.
Dalam hal ini untuk membuang beberapa kasus dapat membuang penggunaan kebutuhan intruksi perbandingan yang telah didedikasikan serta dapat menghasilkan peningkatan dalam hal kecepatan dan kode yang lebih sederhana dan singkat.
Register ini tidak secara otomatis tersimpan ketika memasuki sebuah rutin interupsi dan juga ketika menjalankan sebuah perintah kembali dari interupsi. Namun hal tersebut harus dilakukan melalui softwere.
Gambar 2.4 Status Register ATMega 328
Penjelasan : 1. Bit 7 (I)
Merupakan bit Global Interrupt Enable. Bit ini harus di set agar semua perintah interupsi dapat dijalankan. Untuk perintah interupsi individual akan
di jelaskan pada bagian yang lain. Jika bit ini di-reset, maka semua perintah interupsi baik yang individual maupun yang secara umum akan di abaikan. bit ini akan dibersihkan atau cleared oleh hardwere setelah sebuah interupsi di jalankan dan akan di-set kembali oleh perintah RETI. Bit ini juga dapat di-set dan di-reset melalui aplikasi SEI dan CLL.
3. Bit 6 (T)
Merupakan bit copy storage. intruksi bit copy intruction BLD (Bit Load) and BST (Bit Store) menggunakan bit ini sebagai asal atau tujuan untuk bit yang telah dioperasikan. sebuah bit dari sebuah register dalam register file dapat disalin ke dalam bit ini dengan menggunakan intruksi BST, dan sebuah bit di dalam bit ini dapat di salin ke dalam bit di dalam register pada register file dengan menggunakan perintah BLD.
4. Bit 5 (H)
Merupakan bit Half Carry Flag. Bit ini menandakan sebuah Half Carry dalam beberapa operasi aritmatika. Bit ini berfungsi dalam aritmatika BCD.
5. Bit 4 (S)
Merupakan Sign Bit. Bit ini selalu merupakan sebuah eksklusif diantara Negative Flag (N) dan two’s Complemen Overflow Flag (V).
6. Bit 3 (V)
Merupakan bit Two’s Complemen Overflow Flag. Bit ini menyediakan fungsi aritmatika dua komplemen.
7. Bit 2 (N)
Merupakan bit Negative Flag. Bit ini mengindikasikan sebuah hasil negatif di dalam sebuah fungsi logika atau aritmatika.
8. Bit 1 (Z)
Merupakan Bit Zero Flag. bit ini mengindikasikan sebuah hasil nol “0”
dalam sebuah fungsi aritmatika atau logika.
9. Bit 0 (C)
Merupakan bit Carry Flag. bit ini mengindikasikan sebuah Carry atau sistem dalam sebuah aritmatika atau logika.
2.3.7 Daya
Mikrokontroler Atmega 328 dapat diaktifkan dengan catu daya eksternal.
Adaptor ini dapat dihubungkan dengan menancapkan plug positif 2.1mm ke colokan listrik. Dari baterai dapat dimasukan dalam Gnd dan Vinpin header dari konektor power. Mikrokontroler Atmega 328 ini dapat beroperasi pada pasokan tegangan eksternal 6 sampai 20 volt. Jika diberikan dengan kurang dari 7 volt, pin yang keluaran 5 volt mungkin pasokannya kurang dari 5 volt dan mikrokontroler Atmega 328 mungkin tidak stabil. Jika menggunakan lebih dari 12 volt, regulator tegangan bisa panas dan merusak IC mikro. Kisaran yang disarankan adalah 7-12 volt. Pin sumber daya dalam mikrokontroler Atmega 328 ini adalah sebagai berikut :
1. VIN Tegangan masukan pada mikrokontroler Atmega 328 menggunakan sumber daya eksternal.
2. 5V Catu daya 5 volt ini digunakan untuk daya mikrokontroler dan komponen lainnya pada boardmikrokontroler Atmega 328. Hal ini dapat terjadi dilakukan dari pin VIN melalui regulator on-board, atau melalui port USB atau sumber tegangan lainnya seperti adaptor.
3. GND Pin ground
2.4 Liquid Crystal Display (LCD)
Liquid Crystal Dispalay (LCD) sering diartikan dalam bahasa indonesia
sebagai tampilan kristal cair merupakan suatu jenis media tampilan yang menggunakan kristal cair sebagai penampil utama.
LCD dapat menampilkan karakter ASCI sehingga kita bisa menampilkan campuran huruf dan angka sekaligus berwarna ataupun tidak berwarna, hal ini disebabkan karena terdapat banyak sekali titik cahaya (piksel) yang terdiri darisatu buah kristal cair sebagai sebuah titik cahaya. Walau disebut sebagai titik cahaya namun kristal cair ini tidak memancarkan cahaya sendiri. Sumber cahaya didalam sebuah perangkat LCD ad belakang susunan kristal cair tadi.
Titik cahaya yang jumlahnya puluhan ribu bahkan jutaan inilah yang membentuk tampilan citra. Kutub kristal cair yang dilewati arus listrik akan berubah karena pengaruh polarisasi medan magnetic yang timbul dan oleh karenanya akan hanya membiarkan beberapa warna diteruskan sedangkan warna lainnya tersaring.alah lampu neon berwarna putih dibagian.
Dalam menampilkan karakter untuk membantu menginformasikan proses dan control yang terjadi dalam suatu program robot kita sering menggunakan LCD. Ada beberapa jenis LCD perbedaannya hanya terletak pada alamat menaruh karakternya.
Salah satu LCD yang sering dipergunakan adalah LCD 16x2 artinya LCD tersebut terdiri dari 16 kolom dan 2 baris. LCD ini sering digunakan karena harganya yang relatif murah dan pemakaian nya yang mudah. LCD yang kita gunakan masih membutuhkan agar dapat dikoneksikan dengan system minimum dalam suatu mikrokontroler. Driver tersebut berisi rangkaian pengaman, pengatur
tingkat kecerahan backligt maupun data serta untuk mempermudah pemasangan di mikrokontroler (portable-red).
Gambar 2.5 LCD 2x16
LCD memanfaatjan silicon atau gallium dalam bentuk Kristal cair sebagai pemendar cahaya. Pada layar LCD, setiap matrik adalah susunan dua dimensi piksel yang dibagi dalam baris dan kolom. Dengan demikian, setiap pertemuan yang merupakan lempengan kaca bagian belakang dengan sisi dalam yang ditutupi oleh lapisan elektroda transparan.
Dalam keadaan normal, cairan yang digunakan memiliki warna cerah. Daerah- daer ah tertentu pada cairan akan berubah warnanya menjadi hitam ketika tegangan diterapkan antara bidang latar dan pola elektroda yang terdapat pada sisi dalam lempeng kaca bagian depan. Keunggulan LCD adalah hanya menarik arus yang kecil (beberapa micro ampere), sehingga alat atau sistem menjadi portable karena dapat
menggunakan catu daya yang kecil. Keunggulan lainnya adalah tampilan yang diperlihatkan dapat dibaca dengan mudah di bawah terang sinar matahari.
Di bawah sinar cahaya yang remang-remang dalam kondisi gelap, sebuah lampu (berupa LED) harus dipasang dibelakang layar tampilan.
LCD yang digunakan adalah jenis lCD yang menampilkan data dengan 2 baris tampilan pada display. Keuntungan dari LCD ini adalah :
1. Dapat menampilkan karakter ASCII, sehingga dapat memudahkan untuk membuat program tampilan.
2. Mudah dihubungkan dengan port I/O karena hanya menggunakan 8 bit data dan 3 bit control.
3. Ukuran modul yang proporsional.
Operasi dasar pada LCD terdiri dari empat, yaitu instruksi mengakses proses internal, instruksi menulis data, instruksi membaca kondisi sibuk, dan instruksi membaca data. ROM pembangkit sebanyak 192 tipe karakter, tiap karakter dengan huruf 5x7 dot matrik. Kapasitas pembangkit RAM 8 tipe karakter (membaca program), maksimum pembacaan 80x8 bit tampilan data. Perintah utama LCD adalah Display Clear, Cursor Home, Display ON/OFF, Display Character Blink, Cursor Sihft, dan Display Shift.
2.4.1 Konfigurasi Pin Liquid Crystal Display (LCD)
Gambar 2.6. Konfigurasi LCD
Tabel 2.5 Konfigurasi Pin LCD
Nomor Simbol Level Fungsi
1 Vss - 0 Volt
2 Vcc - 5 + 10% Volt
3 Vee - Penggerak LCD
4 RS H/L
H=Memasukkan Data,L=Memasukkan Ins
5 R/W H/L H=Baca,L=Tulis
6 E Enable Signal
7 DB0 H/L Data Bus
8 DB1 H/L Data Bus
9 DB2 H/L Data Bus
10 DB3 H/L Data Bus
11 DB4 H/L Data Bus
12 DB5 H/L Data Bus
13 DB6 H/L Data Bus
14 DB7 H/L Data Bus
15 V+BL Kecerahan LCC
16 V-BL Kecerahan LCC
Modul LCD memiliki karakteristik sebagai berikut:
1. Terdapat 16 x 2 karakter huruf yang bisa ditampilkan.
2. Setiap terdiri dari 5 x 7 dot-matrix cursor.
3. Terdapat 192 macam karakter.
4. Terdapat 80 x 8 bit display RAM ( maksimal 80 karakter ).
5. Memiliki kemampuan penulisan dengan 8 bit maupun dengan 4 bit.
6. Dibangun oleh osilator lokal.
7. Satu sumber tegangan 5 Volt.
8. Otomatis reset saat tegangan dihidupkan.
9. Bekerja pada suhu 0oC sampai 550C.
Lapisan film yang berisi Kristal cair diletakkan di antara dua kempeng kaca yang telah ditanami elektroda logam transparan. Saat tegangan dicatukan pada beberapa pasang elektroda, molekul-molekul Kristal cair akan menyusun diri agar cahaya yang mengenainya akan dipantulkan atau diserap. Dari hasil pemantulan atau penyerapan cahaya tersebut akan terbentuk pola huruf, angka, atau gambar sesuai yang di aktifkan.
LCD membutuhkan tegangan dan daya yang kecil sehingga sangat popular untuk aplikasi pada kalkulator, arloji digital, dan instrument elektronika, lain seperti
Global Positioning System (GPS), baragraph display dan multimeter digital. LCD umumnya dikemas dalam bentuk Dual In Line Package (DIP) dan mempunyai kemampuan untuk menampilkan beberapa kolom dan baris dalam satu panel. Untuk membentuk pola, baik karakter maupun gambar pada kolom dan baris secara bersamaan digunakan metode Screening.
Metode screening adalah mengaktifkan daerah pertolongan suatu kolom dan suatu baris secara bergantian dan cepat sehingga seolah-olah aktif semua.
Penggunaan metode ini dimaksudkan untuk menghemat jalur yang digunakan untuk mengaktifkan panel LCD. Saat ini telah dikembangkan berbagai jenis LCD, mulai jenis LCD biasa, Passive Matrix LCD (PWLCD), hingga Thin-Film Transistor Active Matrix (IFT-AMLCD). Kemampuan LCD juga telah ditingkatkan dari yang monokrom hingga yang mampu menampilk warna tersebut selain untuk loader ketika mem-program, bisa juga difungsikan sebagai port komunikasi serial.
Arduino menyediakan 20 pin I/O, yang terdiri dari 6 pin input analog dan 14 pin digital input/output. Untuk 6 pin analog sendiri bisa juga difungsikan sebagai output digital jika diperlukan output digital tambahan selain 14 pin yang sudah tersedia.
Untuk mengubah pin analog menjadi digital cukup mengubah konfigurasi pin pada program.
Dalam board kita bisa lihat pin digital diberi keterangan 0-13, jadi untuk menggunakan pin analog menjadi output digital, pin analog yang pada keterangan board 0-5 kita ubah menjadi pin 14-19. Dengan kata lain pin analog 0-5 berfungsi juga sebagi pin output digital 14-16.Sifat open source arduino juga banyak memberikan keuntungan tersendiri untuk kita dalam menggunakan board ini, karena dengan sifat open source komponen yang kita pakai tidak hanya tergantung pada satu merek, namun memungkinkan kita bisa memakai semua komponen yang ada dipasaran. Bahasa pemrograman arduino merupakan bahasa C yang sudah disederhanakan syntax bahasa pemrogramannya sehingga mempermudah kita dalam mempelajari dan mendalami mikrokontroller.
2.5 Buzzer
Buzzer adalah sebuah komponen elektronika yang berfungsi untuk mengubah getaran listrik menjadi getaran suara. Pada dasarnya prinsip kerja buzzer hampir
sama dengan loud speaker, jadi buzzer juga terdiri dari kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut dialiri arus sehingga menjadi elektromagnet, kumparan tadi akan tertarik ke dalam atau keluar, tergantung dari arah arus dan polaritas magnetnya, karena kumparan dipasang pada diafragma maka setiap gerakan kumparan akan menggerakkan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara.
Buzzer biasa digunakan sebagai indikator bahwa proses telah selesai atau terjadi suatu kesalahan pada sebuah alat (alarm).
Gambar 2.7 Buzzer
Buzzer elektronik ini dapat diciptakan dengan merangkaikan beberapa komponen yang pada prinsipnya alat ini dapat menimbulkan pulsa dimana arus listrik adalah sebagai indikator terciptanya pulsa tersebut. Pada pembuatan alat ini, kami menggunakan IC NE555 sebagai sistem pembangkit pulsa yang tentunya arus listrik adalah indicator utama daripada pembangkit sinyalnya.Namun IC NE555 bukanlah satu – satunya komponen yang digunakan. Disini kami menambahkan beberapa komponen pelengkap yang sama bergunanya dalam pembuatan alat ini. Komponen – komponen itu antara lain adalah 1 buah potensiometer 10k, 2 buah kapasitor 0,01uF, 1 buah kapasitor 1uF, 1 buah IC NE555, 1 buah Speaker 8Ω, 0,5watt, 1 buah baterai 9volt, dan 1 buah transistor NPN 9013
2.6 Sensor Kecepatan (RPM)
Sensor kecepatan (RPM) merupakan suatu sensor yang digunakan untuk mendeteksi kecepatan gerak benda untuk selanjutnya diubah kedalam bentuk sinyal elektrik. Proses penginderaan sensor kecepatan merupakan proses kebalikan dari suatu motor, dimana suatu poros/objek yang berputar pada suatu generator akan menghasilkan suatu tegangan yang sebanding dengan kecepatan putaran objek.
Sensor kecepatan yang digunakan ini adalah enkoder. Output enkoder berupa sinyal pulsa yang frekuensinya berbanding lurus dengan kecepatan motor, agar data kecepatan dapat dibaca oleh ADC mikrokontroller, maka output encoder terlebih dahulu harus dikonversi menjadi tegangan. Oleh karena itu ouput encoder dihubungkan ke rangkaian FtoV (frekuensi ke tegangan) dimana rangkaian ini akan mengubah besaran frekuensi (sinyal dari encoder) yang masuk menjadi besaran tegangan yang dalam hal ini digunakan sebagai umpan balik dari kecepatan motor
Gambar 2.8 Sensor Kecepatan (RPM)
2.7 Modul MP3 YX5300
Modul ini akan membaca file mp3 yang terdapat SD card, kemudian mengubahnya menjadi sinyal audio berdasarkan perintah dari mikrokontroler. Untuk dapat berkomunikasi dengan mikrokontroler, modul ini memanfaatkan port UART yang tersedia pada mikrokontroler. Berikut merupakan bentuk dari modul MP3 YX5300 dan table koneksi antara modul ini dengan mikrokontroler.
Gambar 2.9 Modul MP3 YX5300
2.8 Bahasa Pemrograman C
Bahasa C dikembangkan pada Lab Bell pada tahun 1978, oleh Dennis Ritchi dan Brian W. Kernighan. Pada tahun 1983 dibuat standar C yaitu stnadar ANSI ( American National Standards Institute ), yang digunakan sebagai referensi dari berbagai versi C yang beredar dewasa ini termasuk Turbo C.
Dalam beberapa literature, bahasa C digolongkan bahasa level menenganh karena bahasa C mengkombinasikan elemen bahasa tinggi dan elemen bahasa rendah. Kemudahan dalam level rendah merupakan tujuan diwujudkanya bahasa C.
pada tahun 1985 lahirlah pengembangan ANSI C yang dikenal dengan C++
(diciptakan oleh Bjarne Struostrup dari AT % TLab). Bahasa C++ adalah pengembangan dari bahasa C. bahasa C++ mendukung konsep pemrograman berorientasu objek dan pemrograman berbasis windows.
Sampai sekarang bahasa C++ terus brkembang dan hasil perkembangannya muncul bahasa baru pada tahun 1995 (merupakan keluarga C dan C++ yang dinamakan java). Istilah prosedur dan fungsi dianggap sama dan disebut dengan fungsi saja. Hal ini karena di C++ sebuah prosedur pada dasanya adalah sebuah fungsi yang tidak memiliki tipe data kembalian (void). Hingga kini bahasa ni masih popular dan penggunaannya tersebar di berbagai platform dari windows samapi linux dan dari PC hingga main frame. Ada pun kekurangan dan Kelebihan Bahasa C sebagai berikut :
1. Kelebihan Bahasa C:
a) Bahasa C tersedia hampir di semua jenis computer.
b) Kode bahasa C sifatnya adalah portable dan fleksibel untuk semua jenis computer.
c) Bahasa C hanya menyediakan sedikit kata-kata kunci. Hanya terdapat 32 kata kunci
d) Proses executable program bahasa C lebih cepat e) Dukungan pustaka yang banyak.
f) C adalah bahasa yang terstruktur
g) Bahasa C termasuk bahasa tingkat menengah
Penempatan ini hanya menegaskan bahwa c bukan bahasa pemrograman yang berorientasi pada mesin. yang merupakan ciri bahasa tingkat rendah.Melainkan berorientasi pada obyek tetapi dapat dinterprestasikan oleh mesin. inilah salah satu kelebihan c yaitu memiliki kemudahan dalam menyusun programnya semudah bahasa tingkat tinggi namun dalam mengesekusi program secepat bahasa tingkat rendah.
2. Kekurangan Bahasa C:
a) Banyaknya operator serta fleksibilitas penulisan program kadang kadang membingungkan pemakai.
b) Bagi pemula pada umumnya akan kesulitan menggunakan pointer.
2.8.1 Struktur Bahasa C
a. Program bahasa C tersusun atas sejumlah blok fungsi.
b. Setiap fungsi terdiri dari satu atau beberapa pernyataan untuk melakukan suatu proses tertentu.
c. Tidak ada perbedaan antara prosedur dan fungsi.
d. Setiap program bahasa C mempunyai suatu fungsi dengan nama “main” (Program Utama).
e. Fungsi bisa diletakkan diatas atau dibawah fungsin “main”.
f. Setiap statemen diakhiri dengan semicolon (titik koma).
2.8.2 Pengenal
Pengenal (identifier) merupakan sebuah nama yang didefenisikan oleh
pemrograman untuk menunjukkan indetitas dari sebuah konstanta, variable, fungsi, label atau tipe data khusus. Pemberian nama sebuah pengenal dapat
ditentukan bebas sesuai keinginan pemrogram tetapi harus memenuhi atura berikut :
1. Karakter pertama tidak boleh menggunakan angka
2. Karakter kedua dapat berupa huruf, angka, atau garis bawah.
3. Tidak boleh menggunakan spasi.
4. Bersifat Case Sensitive, yaitu huru capital dan huruf kecil dianggap berbeda.
5. Tidak boleh mengunakan kata – kata yang merupakan sitaks maupun operator dalam pemrograman C, misalnya : Void, short, const, if, static, bit, long, case, do, switch dll.
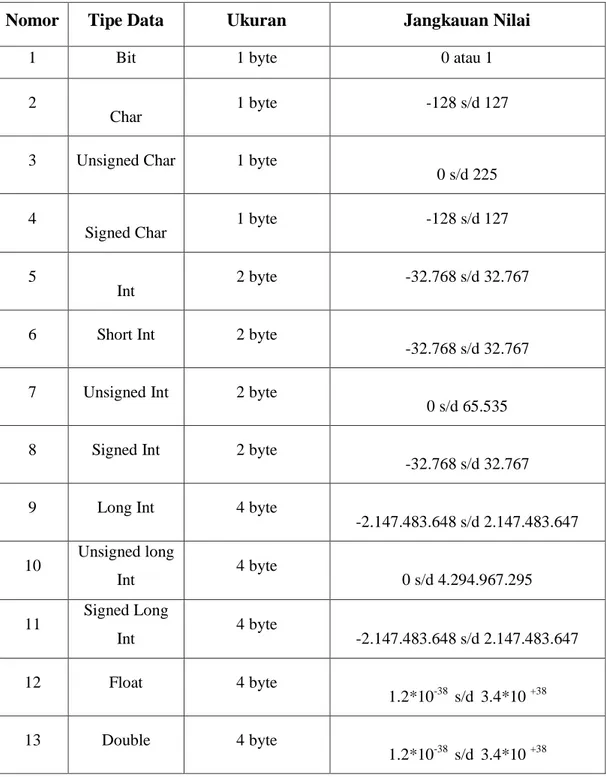
2.8.3 Tipe Data
Tipe data merupakan suatu hal yang penting untuk kita ketahui pada saat belajar bahasa pemrograman. Kita harus dapat menentukan tipe data yang tepat
untuk menampung sebuah data, baik itu data berupa bilangan numerik ataupun karakter. Hal ini bertujuan agar program yang kita buat tidak membutuhkan pemesanan kapling memori yang berlebihan.
Seorang programmer yang handal harus dapat memilih dan menentukan tipe data apa yang seharusnya digunakan dalampembuatan sebuah program.
Secara garis besar tipe data pada bahasa C dibagi menjadi beberapa bagian antara lain sebagai Berikut
Macam-Macam Tipe Data Pada Bahasa C : 1. Tipe Data Karakter
Sebuah karakter, baik itu berupa huruf atau angka dapat disimpan padasebuah variabel yang memiliki tipe data char dan unsigned char.
Besarnya datayang dapat disimpan pada variabel yang bertipe data char adalah -127 - 127. Sedangkan untuk tipe data unsigned char adalah dari 0 - 255. Pada dasarnyasetiapkarakter memiliki nilai ASCII, nilai inilah yang sebetulnya disimpan padavariabel yang bertipe data karakter ini.
2. Tipe Data Bilangan Bulat
Tipe data bilangan bulat atau dapat disebut juga bilangan decimal merupakan sebuah bilangan yang tidak berkoma. Pada bahasa C terdapat bermacam-macam tipe data yang dapat kita gunakan untuk menampung bilangan bulat. Kita dapat menyesuaikan penggunaan tipe data dengan terlebih dahulu memperhitungkan seberapa besar nilai yang akan kita simpan. Contohnya seperti berikut, kiata akan melakukan operasi penjumlahan nilai 300 dan 100 dan hasilnya akan disimpan pada variabel c.Jika dilihat, hasil dari penjumlahan tersebut nilainya akan lebih besar dari255 dan nilainya pasti positif, oleh karena itu sebaiknya kita menggunakan tipedata unsigned int. Namun berbeda halnya jika saya ingin melakukan operasipengurangan -5 - 300, jika dilihat hasilnya akan negatif maka selayaknya digunakan variabel dengan tipe data int.
3. Tipe Data Bilangan Berkoma
Pada bahasa C terdapat dua buah tipe data yang berfungsi untuk menampung data yang berkoma. Tipe data tersebut adalah float dan double. Double lebih memiliki panjang data yang lebih banyak
dibandingkan float. Tipe data double dapat digunakan jika kita membutuhkan variabel yang dapat menampung tipe data berkoma yang bernilai besar.
Tabel 2.6 Tipe Data
Nomor Tipe Data Ukuran Jangkauan Nilai
1 Bit 1 byte 0 atau 1
2 Char 1 byte -128 s/d 127
3 Unsigned Char 1 byte
0 s/d 225
4 Signed Char 1 byte -128 s/d 127
5 Int 2 byte -32.768 s/d 32.767
6 Short Int 2 byte
-32.768 s/d 32.767
7 Unsigned Int 2 byte
0 s/d 65.535
8 Signed Int 2 byte
-32.768 s/d 32.767
9 Long Int 4 byte
-2.147.483.648 s/d 2.147.483.647 10 Unsigned long
Int 4 byte
0 s/d 4.294.967.295
11 Signed Long
Int 4 byte
-2.147.483.648 s/d 2.147.483.647
12 Float 4 byte
1.2*10-38 s/d 3.4*10 +38
13 Double 4 byte
1.2*10-38 s/d 3.4*10 +38
2.8.4 Konstanta Dan Variabel
Konstanta dan variable merupakan sebuah tempat untuk menyimpan data yang berada di dalam memori. Konstanta berisi data yang nilainya tetap dan tidak dapat diubah selama program dijalankan, sedangkan variable berisi data yang bias berubah nilainya pada saat program dijalankan.
2.9 Motor DC
Motor DC atau lebih tepatnya motor listrik adalah komponen elektrik yang sifatnya merubah besaran elektrik menjadi berupa putaran. Motor listrik terdiri atas tiga bagian utama yang disebut stator (bagian yang diam) dan rotor (bagian yang bergerak) dan air gap. Rotor dapat berputar karena adanya medan magnet yang dipengaruhi oleh arus listrik. Air gap adalah bagian yang memisahkan rotor dan stator. Motor terdiri dari dua jenis yaitu motor AC dan motor DC.
Motor DC menggunakan 2 data yang harus tersambung ke data digital mikrokontroler namun ketika harus menggunakan motor DC yang membutuhkan arus tinggi harus menggunakan rangkaian penguat (driver) dari motor ke mikrokontroler. Sedangkan Motor AC biasanya memerlukan rangkian berupa relay untuk menjalankannya, karena tegangan yang berasal dari mikrokontroler adalah DC sedangkan tegangan yang dibutuhkan adalah tegangan AC.
Gambar 2.10 Motor DC
2.9.1 Prinsip Kerja Motor DC
1. Pada posisi 1 arus elektron mengalir dari sikat negatif menuju ke sikatpositif.
Akan timbul torsi yang menyebabkan jangkar berputar berlawanan arah jarum jam
2. Ketika jangkar pada posisi 2, sikat terhubung dengan kedua segmencomutator. Aliran arus pada jangkar terputus sehingga tidak ada torsi yang dihasilkan. Tetapi, kelembaban menyebabkan jangkar tetap berputar melewati titik netral.
3. Pada posisi 3, letak sisi jangkar berkebalikan dari letak sisi jangkarpada posisi 1. Segmen comutator membalik arah arus elektron yang mengalirpada kumparan jangkar. Oleh karena itu arah arus yang mengalir padakumparan jangkar sama dengan posisi 1. Torsi akan timbul yang menyebabkan jangkar tetap berputar berlawanan arah jarum jam.
4. Jangkar berada pada titik netral. Karena adanya kelembaman padaporos jangkar, maka jangkar berputar terus – menerus.
Gambar 2.11 Prinsip Kerja Motor DC
Pada dasarnya, motor arus searah merupakan suatu transduser yang mengubah energi listrik menjadi energi mekanik. Proses konversi ini terjadi melalui medan magnet.Ketika arus (I) melalui sebuah konduktor, akan dihasilkan garis-garis gayamagnet (fluks) B. Arah dari fluks bergantung pada arus yang mengalir atau dimana terjadi perbedaan potensial tegangan.
2.10 Power Supply Adaptor (PSA)
Arus Listrik yang kita gunakan di rumah, kantor dan pabrik pada umumnya adalah dibangkitkan, dikirim dan didistribusikan ke tempat masing-masing dalam bentuk Arus Bolak-balik atau arus AC (Alternating Current). Hal ini dikarenakan pembangkitan dan pendistribusian arus Listrik melalui bentuk arus bolak-balik (AC) merupakan cara yang paling ekonomis dibandingkan dalam bentuk arus searah atau arus DC (Direct Current). Akan tetapi, peralatan elektronika yang kita gunakan sekarang ini sebagian besar membutuhkan arus DC dengan tegangan yang lebih rendah untuk pengoperasiannya. Oleh karena itu, hampir setiap peralatan Elektronika memiliki sebuah rangkaian yang berfungsi untuk melakukan konversi arus listrik dari arus AC menjadi arus DC dan juga untuk menyediakan tegangan yang sesuai dengan rangkaian Elektronika-nya. Rangkaian yang mengubah arus listrik AC menjadi DC ini disebut dengan DC Power Supply atau dalam bahasa Indonesia disebut dengan Catu daya DC. DC Power Supply atau Catu Daya ini juga sering dikenal dengan nama “Adaptor”.
Sebuah DC Power Supply atau Adaptor pada dasarnya memiliki 4 bagian utama agar dapat menghasilkan arus DC yang stabil. Keempat bagian utama tersebut diantaranya adalah Transformer, Rectifier, Filter dan Voltage Regulator. Dibawah ini merupakan Diagram Blok DC Power Supply (Adaptor) pada umumnya.
Gambar 2.12 Diagram blok DC Power Supply
2.10.1 Prinsip Kerja DC Power Supply (Adaptor)
Berikut ini adalah penjelasan singkat tentang prinsip kerja DC Power Supply (Adaptor) pada masing-masing blok berdasarkan Diagram blok diatas, yaitu :
1. Transformator (Transformer/Trafo)
Transformator (Transformer) atau disingkat dengan Trafo yang digunakan untuk DC Power supply adalah Transformer jenis Step-down yang berfungsi untuk
menurunkan tegangan listrik sesuai dengan kebutuhan komponen Elektronika yang terdapat pada rangkaian adaptor (DC Power Supply). Transformator bekerja berdasarkan prinsip Induksi elektromagnetik yang terdiri dari 2 bagian utama yang berbentuk lilitan yaitu lilitan Primer dan lilitan Sekunder. Lilitan Primer merupakan Input dari pada Transformator sedangkan Output-nya adalah pada lilitan sekunder. Meskipun tegangan telah diturunkan, Output dari Transformator masih berbentuk arus bolak-balik (arus AC) yang harus diproses selanjutnya.
Gambar 2.13 Transformator/ Trafo Step Down
2. Rectifier (Penyearah Gelombang)
Rectifier atau penyearah gelombang adalah rangkaian Elektronika dalam Power Supply (catu daya) yang berfungsi untuk mengubah gelombang AC menjadi gelombang DC setelah tegangannya diturunkan oleh Transformator Step down.
Rangkaian Rectifier biasanya terdiri dari komponen Dioda. Terdapat 2 jenis rangkaian Rectifier dalam Power Supply yaitu “Half Wave Rectifier” yang hanya terdiri dari 1 komponen Dioda dan “Full Wave Rectifier” yang terdiri dari 2 atau 4 komponen dioda.
Gambar 2.14 Rectifier (Penyearah)
3. Filter (Penyaring)
Dalam rangkaian Power supply (Adaptor), Filter digunakan untuk meratakan sinyal arus yang keluar dari Rectifier. Filter ini biasanya terdiri dari komponen Kapasitor (Kondensator) yang berjenis Elektrolit atau ELCO (Electrolyte Capacitor).
Gambar 2.15 Filter (Penyaring)
4. Voltage Regulator (Pengatur Tegangan)
Untuk menghasilkan Tegangan dan Arus DC (arus searah) yang tetap dan stabil, diperlukan Voltage Regulator yang berfungsi untuk mengatur tegangan sehingga tegangan Output tidak dipengaruhi oleh suhu, arus beban dan juga tegangan input yang berasal Output Filter. Voltage Regulator pada umumnya terdiri dari Dioda Zener, Transistor atau IC (Integrated Circuit). Pada DC Power Supply yang canggih, biasanya Voltage Regulator juga dilengkapi dengan Short Circuit Protection (perlindungan atas hubung singkat), Current Limiting (Pembatas Arus) ataupun Over Voltage Protection (perlindungan atas kelebihan tegangan). [5]
Gambar 2.16 Voltage Regulator (Pengatur Tegangan)
2.10.2 Rangkaian Sederhana DC Power Supply (Adaptor)
Berikut ini adalah Rangkaian Dasar dari sebuah DC Power Supply :
Gambar 2.17 Rangkaian Sederhana DC Power Supply
30 BAB 3
PERANCANGAN DAN PEMBUATAN SISTEM
Perancangan yang dilakukan dalam penelitian ini meliputi perancangan perangkat keras dan perencangana perangkat lunak. Perancangan perangkat keras dimulai dengan merancang diagram blok dan prinsip kerja sistem, kemudian dilanjutkan merancang rangkaian sistem dengan menggabungkan keseluruhan perangkat menjadi sebuah sistem terkendali.
3.1 Metodologi Perancangan 3.1.1 Tahap Persiapan
Metode Pelaksanaan dalam penelitian ini secara umum dibagi kedalam 5 tahap yang diperlihatkan oleh diagram berikut :
Tahap 1 : Pendesainan Prototipe Alat
Pada tahap ini kegiatan yang dilakukan adalah mendesain Alat dengan menggunakan software google sketch-up 2016. Pada tahap ini akan di desain komponen-komponen alat yaitu desain ruang alat sebagai tempat sensor.
Tahap 2 : Pembuatan Prototipe Alat
Ruang alat dibuat berbentuk balok dari bahan plastik, dan juga dengan menggunakan akrilik sebagai wadah tempat komponen pada.alat.
Tahap 3 : Pembuatan rangkaian alat
Pada tahap ini akan dilakukan pembuatan rangkaian alat yang berfungsi untuk melakukan akusisi data secara otomatis yang diperoleh sensor.
Tahap 4 : Pengukuran
Pada tahap ini akan dilakukan pengukuran kecepatan (V) dan putaran roda per menit (RPM)
Tahap 5 : Analisa Data
Pada tahap ini akan dilakukan analisa terhadap data yang diperoleh dari hasil pencocokkan. Analisa ini meliputi kecocokan kecepatan dan putaran roda per menit (RPM) untuk dapat menghidupkan mp3 player dan buzzer.
3.1.2 Tahap Pembuatan Sistem
Pada tahap ini akan dilakukan pembuatan rangkaian alat yang berfungsi untuk melakukan akusisi data secara otomatis yang diperoleh sensor. Adapun tahapan- tahapan pelaksanaan pada tahap ini sebagai berikut:
a. Mendesain layout rangkaian dengan software Eagle.
b. Mencetak hasil layout pada kertas foto dengan menggunakan printer laser Z c. Mencetak hasil cetakan pada PCB dengan cara memanaskanya pada suhu
1600C kemudian dilarutkan dengan menggunakan larutan FeCl2.
d. Memasang komponen- komponen elektronik sesuai dengan jalur yang telah dibuat pada layout rangkaian
3.1.3 Tahap Pengukuran, Analisis dan Kesimpulan
Dalam menyusun skripsi ini penulis melakukan beberapa penerapan metode penelitian untuk menyelesaikan permasalahan. Metode penelitian yang dilakukan adalah dengan cara:
a. Studi pustaka untuk mengumpulkan, mempelajari serta menyeleksi bahan- bahan tentang pemograman berbasis mikrokontroller Arduino.
b. Pengumpulan data yang berhubungan dengan tugas akhir.
Data yang dibutuhkan adalah data-data tentang komponen-komponen elektronika yang akan digunakan dalam perancangan alat.
c. Analisis Sistem.
Melakukan analisis terhadap program yang akan dibuat serta komponen- komponen elektronika yang digunakan.
d. Perancangan sistem.
Merancang suatu sistem peralatan informasi peringatan kecepatan maksimum pada kendaraan bermotor menggunakan sensor mp3. Termasuk interface aplikasi dan perancangan susunan rangkaian elektronika.
e. Impelentasi Sistem (Coding).
Menyusun kode program untuk sistem tempat sampah yang dapat memisahkan sampah organic dan sampah an organic berbasis mikrokontroller arduino.
f. Testing
Melakukan pengujian sistem yang telah dibuat sehingga dapat melakukan perbaikan sistem apabila ditemukan kesalahan pada sistem.
g. Dokumentasi Sistem.
Pembuatan dokumentasi sistem,lengkap dengan analisis yang telah diperoleh.
Analisis Sistem Sedang Berjalan
Bahasa Pemograman yang digunakan pada alat adalah Bahasa Pemograman Arduino yang dimana bahasa pemograman Arduino adalah sebuah kit elektronik open source yang dirancang khusus dengan kemampuan komputasi yang dapat berinteraksi secara lebih dekat dengan dunia nyata dibandingkan komputer biasa, untuk memudahkan bagi para seniman, desainer, dan siapapun yang tertarik dalam menciptakan objek atau mengembangkan perangkat elektronik yang dapat berinteraksi dengan bermacam-macam sensor dan pengendali Arduino dapat di operasikan dengan cara menginstal terlebih dahulu software atau aplikasi pendukung untuk memprogram mikrokontroler arduino berupa program Sederhana, dengan programming environment turunan dari bahasa pemrograman C yang mudah dimengerti.
3.2 Perancangan Sistem 3.2.1 Diagram Blok Sistem
Untuk mempermudah dalam mempelajari dan memahami cara kerja alat ini, maka system perancangan dibuat berdasarkan diagram blok dimana tiap blok mempunyai fungsi dan cara kerja tertentu. Adapun diagram blok dari system yanga dirancang adalah sebagai berikut:
Gambar 3.1 Diagram Blok Proyek
3.2.2 Perancangan Rangkaian
1. Rangkaian Mikrokontroler ATMega 328 merupakan otak dari alat yang dibuat.
Rangkaian ini menggunakan Mikrokontroler ATMega328 sebagai pusat dari pemrosesan data. Berikut gambar rangkaian yang digunakan pada alat ini:
Gambar 3.2 Rangkaian Mikrokontroler ATMega328
Rangkaian ini terbagi atas 2 bagian utama, yaitu rangkaian minimum mikrokontroler ATMega328 dan rangkaian komunikasi mikrokontroler. Rangkaian minimum mikrokontroler terdiri dari rangkaian Reset yang dibentuk oleh R1, dan kemudian rangkaian pembangkit clock yang terdiri dari kristal Q1 dan 2 buah kapasitor C1 dan C2. Konektor J1 digunakan sebagai jalur pengisian bootloader mikrokontroler. C3 digunakan sebagai filter tegangan yang masuk ke mikrokontroler.
Motor DC Sensor
Kecepatan
Mikrokontroler Atmega328
LCD
Buzzer
Power Supply Adaptor
MP3 Player
LED1 diperulkan sebagai indikator ada atau tidaknya tegangan pada mikrokontroler Ketika sudah dihubungkan ke power supply. LED2 digunakan sebagai sarana pengujian rangkaian ketika rangkaian sudah dibuat.
2. Sensor kecepatan (RPM) merupakan suatu sensor yang digunakan untuk mendeteksi kecepatan gerak benda untuk selanjutnya diubah kedalam bentuk sinyal elektrik. Proses penginderaan sensor kecepatan merupakan proses kebalikan dari suatu motor, dimana suatu poros/objek yang berputar pada suatu generator akan menghasilkan suatu tegangan yang sebanding dengan kecepatan putaran objek.
Sensor kecepatan yang digunakan ini adalah enkoder. Output enkoder berupa sinyal pulsa yang frekuensinya berbanding lurus dengan kecepatan motor, agar data kecepatan dapat dibaca oleh ADC mikrokontroller, maka output encoder terlebih dahulu harus dikonversi menjadi tegangan. Oleh karena itu ouput encoder dihubungkan ke rangkaian FtoV (frekuensi ke tegangan) dimana rangkaian ini akan mengubah besaran frekuensi (sinyal dari encoder) yang masuk menjadi besaran tegangan yang dalam hal ini digunakan sebagai umpan balik dari kecepatan motor.
Berikut gambar rangkaian yang digunakan pada alat ini:
Gambar 3.3 Rangkaian Sensor Kecepatan (RPM)
3. Rangkaian Power Supply berfungsi sebagai jalur untuk memasukkan program ke memori mikrokontroler. Berikut gambar rangkaian yang digunakan pada alat ini:
Gambar 3.4 Rangkaian Power Supply
Rangkaian ini dibangun dari IC CH340G yang merupakan konverter komunikasi USB ke UART-TTL. Ini diperlukan agar mikrokontroler yang hanya mempunyai fasilitas komunikasi serial UART-TTL dapat berkomunikasi dengan PC yang mempunyai fasilitas port USB. Sebagai pembangkit clock pada rangkaian komunikasi ini, digunakan kristal Q2, dan C4, C5. Untuk adaptor yang dirakit secara terpisah biasanya merupakan adaptor yang bersipat universal yang mempunyai tegangan output yang bisa diatur sesuai kebutuhan, misalnya 3 Volt, 4,5 Volt, 6 Volt, 9 Volt,12 Volt dan seterusnya. Adapun dalam alat ini, Power Supply Adaptor (PSA) yang digunakan adalah 12V.
4. Buzzer adalah sebuah komponen elektronika yang berfungsi untuk mengubah getaran listrik menjadi getaran suara. Pada dasarnya prinsip kerja buzzer hampir sama dengan loud speaker, jadi buzzer juga terdiri dari kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut dialiri arus sehingga menjadi elektromagnet, kumparan tadi akan tertarik ke dalam atau keluar, tergantung dari arah arus dan polaritas magnetnya, karena kumparan dipasang pada diafragma maka setiap gerakan kumparan akan menggerakkan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara. Berikut merupakan gambar rangkaian buzzer yang digunakan
Gambar 3.5 Rangkain Buzzer
5. MP3 berfungsi untuk membaca file mp3 yang terdapat SD card, kemudian mengubahnya menjadi sinyal audio berdasarkan perintah dari mikrokontroler. Untuk dapat berkomunikasi dengan mikrokontroler, modul ini memanfaatkan port UART yang tersedia pada mikrokontroler.