STUDI SISTEM KENDALI ELEVATOR JEMBATAN PENYEBERANG JALAN
BERBASIS PLC
Dwiyanto
Program Studi Teknik Elektro, Sekolah Tinggi Teknologi Mandala Jl.Soekarno Hatta No.597 Bandung
Telp. (022) 7301738, 70791003 Fax. (022) 7304854 Bandung
ABSTRACT
The embodiment of the development of the electronic world is increasingly delivering humans to theautomation system. One type of automatic equipment is PLC. Currently PLC usage has replaced the conventional control tools in the industry due to the advantages it has. PLC is a microprocessor-based digital controller device that can be programmed control process. PLC consists of three parts, namely: Central Processing Unit (CPU), a circuit for receiving input data (Input module) and a circuit to receive output data (Output module) which is assembled to form a unified function and operation. The provision of comfort facilities for modern transport is vital today. The development of science and technology created by human is always aimed at the change of life towards towards the better. In this research, the writer tries to design an elevator bridge elevator control system based on PLC, where this system serves as a means of transportation for humans to cross the road.
Keywords: Relay, PLC, Ladder, elevator
ABSTRAK
Perwujudan perkembangan dunia elektronik semakin mengantarkan manusia pada sistem otomatisasi. Salah satu jenis peralatan otomatis adalah PLC. Saat ini Penggunaan PLC telah menggantikan piranti kontrol konvensional di industri karena kelebihan yang dimilikinya. PLC merupakan sebuah alat pengendali digital berbasis microprosesor yang proses pengendaliannya bisa diprogram. PLC terdiri dari tiga bagian yaitu : Central Processing Unit (CPU), sirkuit untuk menerima data input (Input module) dan sirkuit untuk menerima data output (Output module) yang dirangkai membentuk satu kesatuan fungsi dan operasi. Penyediaan sarana kenyamanan bagi transportasimodern merupakan hal yang sangat vital dewasa ini. Perkembangan ilmu pengetahuan dan teknologi diciptakan manusia senantiasa ditujukan bagi perubahan kehidupan menuju kearah yang lebih baik. Dalam penelitian ini penulis mencoba untuk merancang suatu sistem kendali elevator jembatan penyebrang jalan berbasis PLC, dimana sistem ini berfungsi sebagai alat transportasi bagi manusia untuk menyebrang jalan.
Kata Kunci: Relay, PLC, Ladder, elevator
I. PENDAHULUAN
Perkembangan teknologi elektronika,komunikasi dan teknologi informasi telah banyak diaplikasikan dalam berbagai bidang kehidupan guna membantu memudahkan pekerjaan manusia sebagai user.Tidak terkecuali dalam bidang system kendali dengan memanfaatkan teknologi tersebut dalam bidang usaha, proses
produksi di industri
maupundalambidangtransportasi. Teknologi melektronika semi konduktor telah
menghasilkan berbagai macam komponen yang difungsikan sebagai pengendali berbagai macam peralatan (Control System Device) yang dapat bekerja secara otomatis seperti mikroprosessor, mikrokontroller termasuk Programmable Logic Control (PLC).
II. TEORI DASAR
ISU TEKNOLOGI STT MANDALA VOL.12 NO.2 DESEMBER 2017 – ISSN 1979-4818
17
untuk melakukan fungsi logika, elektromekanik relai, timer dan counter. PLC bisa disebut juga komputer yang dirancang untuk penggunaan pada pengendalian mesin. Tidak seperti komputer, PLC dirancang untuk bekerja pada lingkungan industri dan dilengkapi dengan input/output khusus dan pengendali bahasa pemrograman.
Program-program dibuat dengan bahasa pemrograman berupa Ladder Diagram (diagram tangga) yang dibuat di dalam komputer menggunakan software khusus dapat menampilkan Ladder Diagram danStatement List. Hasil program yang telah dibuat menggunakan komputer maupun Consolekemudian ditransfer ke dalam PLC.
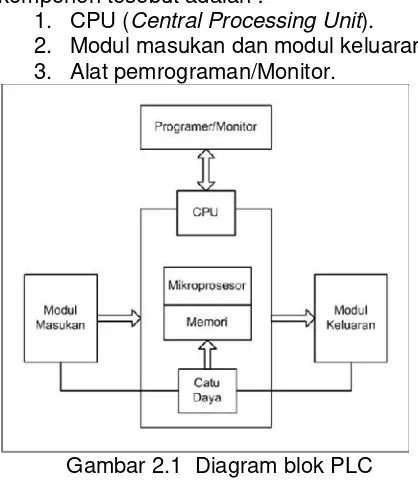
Dalam sistem PLC terdapat 3 (tiga) bagian komponen utama. Ketiga bagian komponen tesebut adalah :
1. CPU (Central Processing Unit). 2. Modul masukan dan modul keluaran. 3. Alat pemrograman/Monitor.
Gambar 2.1 Diagram blok PLC CPU (Central Processing Unit)
CPU adalah sistem yang didasarkan pada prosesor mikro yang menggantikan relai pengendali, pencacah, timer, dan pembuat urutan. CPU mengontrol dan mengawasi semua operasi di dalam PLC, dan mengeksekusi instruksi program yang tersimpan di dalam memori, serta mengirimkan perintah output yang tepat untuk mengendalikan piranti. Memori merupakan bagian utama dari CPU yang mempunyai fungsi secara umum untuk menyimpan data atau program yang telah dibuat. Informasi yang disimpan pada
memori berhubungan dengan cara data input dan outrput harus diproses.
Program pengendali sesungguhnya dilakukan di dalam komponen penyimpanan memori elektronis, misalnya RAM dan EEPROM. Unit yang memproses, membaca/mengamati data dari modul input/output dan menyimpan kondisinya pada memori. Kemudian unit prosesor membaca/mengamati program pemakai yang disimpan pada memori, dan membuat keputusan yang menyebabkan output berubah.
Modul masukan dan modul keluaran Hal yang terpenting dalam modul masukan/keluaran adalah tegangan modul dan nilai arus. Maksudnya kita harus lebih teliti dalam memberikan suplai tegangan ke modul I/O PLC. Sebab dengan memberikan suplai tegangan yang tidak sesuai dengan nilai yang dibutuhkan modul I/O PLC, maka akan mengakibatkan kerusakan.
Terminal masukan mengirimkan sinyal dari kabel yang dihubungkan dengan masukan sensor dan transduser, sedangkan keluaran menyediakan tegangan keluaran untuk menjalankan alat dan indikator alat. Sinyal diskrit dan sinyal analog merupakan inputan modul masukan/keluaran PLC. Alat pemrograman/monitor
Piranti pemrograman menyediakan fasilitas pemrograman untuk seorang programmer supaya dapat berkomunikasi dengan PLC. Programmer PLC dapat mengeksekusi, mengedit, dan memonitor program dengan terhubung ke unit prosesor dan mengijinkan akses ke memori pemakai.
Unit pemrograman kemungkinan adalah terminal yang dilakukan LCD (liquid crystal display), unit displai LED(light emiting diode), atau keyboard dan unit displai video. Displai video menawarkan keuntungan penampilan jumlah logika dalam jumlah yang besar pada layar, dan penyederhanan interpretasi program.
Ladder Diagram relatif paling mudah dipahami karena secara umum simbol yang dipakai mirip gambar dalam rangkaian relai/kontaktor.
Instruksi List mirip seperti listing perintah dalam bahasaAssembly.
III. PERANCANGAN DAN REALISASI Untuk merealisasikan dan mewujudkan suatu bentuk ide menjadi suatu sistem sesuai dengan yang diinginkan kedalam bentuk alat yang berupa Prototype Elevator jembatan penyebrangan jalan, berlandaskan kepada teori dan data base yang telah dipelajari.
Langkah-langkah yang dilakukan dalam pembuatan penelitian ini secara garis besar adalah sebagai berikut :
1. Perancangan Mekanik / Hardware. 2. Wiring.
3. Pembuatan Program / Software. Perancangan Sistem
Didalam perancangan suatu sistem yang menggunakan PLC, terdapat berapa hal yang perlu diperhatikan ketika kita hendak memulai perancangan antara lain :
Tabel 3.1 Kronologis perancangan Pertama-tama kita tentukan terlebih dahulu plan dari sistem yang ingin kita buat. Adapun plan dari perancangan sistem yang akan dibuat oleh penulis dalam penelitian ini adalah "Studi Sistem Kendali Elevator Jembatan Penyebrang Jalan".
Gambar 3.1 Plan (Elevator jembatan ) Setelah kita menentukan plan maka tahapan selanjutnya adalah mendeskripsikan plan yang akan kita buat.Pb1 ditekan maka pintu1 terbuka (M1 Forward), jika sangkar berada di seberang maka akan memanggil sangkar kemudian pintu1 terbuka (M1 forward).Ls1 disentuh, maka M1 Forwad off.Setelah Timer 10s maka pintu1 tertutup (M1 Revers).
Jika Sensor1 aktif maka pintu1 terbuka kembali. Ls2 disentuh, maka (M1 Revers) off. kemudian sangkar naik (M2 Forward).Ls4 disentuh, maka (M2 forward) off kemudian sangkar ke kanan (M3 Forward). Ls6 disentuh, maka (M3 forward) off kemudian sangkar turun (M2 Revers).Ls8 disentuh, (M2 Revers) off kemudian pintu2 terbuka (M4 forward).Ls10 disentuh, maka (M4 Forward) off.Setelah Timer 10s maka pintu2 tertutup (M4 Revers). Jika Sensor2 aktif maka pintu2 terbuka kembali. Pb2 ditekan maka pintu2 terbuka (M4 Forward), jika sangkar berada di seberang maka akan memanggil sangkar kemudian pintu2 terbuka (M4 Forward).Setelah Timer 10s maka pintu2 akan tetutup kembali Setelah deskripsi plan selesai dibuat, maka kita tentukan Input dan Outputnya berupa apa saja dan berapa jumlahnya.
Input:
Pb1 (Push Button 1) Pb2 (Push Button 2) Sensor Infra Red 1 Sensor Infra Red 2 Ls1 (Limit Switch 1) Ls2 (Limit Switch 2) Ls3 (Limit Switch 3) Ls4 (Limit Switch 4) Ls5 (Limit Switch 5) Ls6 (Limit Switch 6) Ls7 (Limit Switch 7) Ls8 (Limit Switch 8) Ls9 (Limit Switch 9) Ls10 (Limit Switch 10) Output
ISU TEKNOLOGI STT MANDALA VOL.12 NO.2 DESEMBER 2017 – ISSN 1979-4818
19
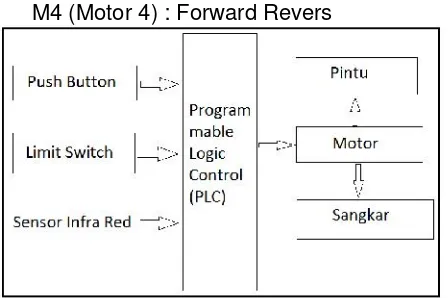
M4 (Motor 4) : Forward ReversGambar 3.2 Block diagram Sistem One Line Diagram ( Diagram Konvensional)
Diagram konvensional dibuat untuk membantu pembuatan program / software yang akan dibuat sesuai dengan plan. Namun biasanya bagi orang yang sudah mahir didalam pemrograman bahasa PLC, langsung membuat program (baik lader diagram atau FBD) tanpa harus lagi membuat diagram konvensional.
Program
Terdapat 4 (empat) bahasa pemrograman yang digunakan dalam PLC, namun biasanya setiap PLC menggunakan satu bahasa pemrograman didalam pengoperasiannya, tergantung dari karakteristik setiap merk PLC.
1. Lader Diagram 2. Steatement List
3. Function Block Diagram (FBD) 4. Graphset
Perancangan Hardware
Elevator penyebrangan jalan yang penulis buat adalah berupa prototype, maka perangkat keras yang digunakan bukanlah komponen sebenarnya yang dipakai dilapangan.
Rangka Elevator
Bahan yang digunakan untuk membuat rangka ialah siku yang terbuat dari Akrilik dan alumunium dengan ukuran panjang 8 cm, lebar 8 cm, dan tinggi 30 cm. sedangkan untuk atap panjangnya 60 cm, dan lebarnya 12 cm.
Sangkar
Sangkar Elevator dibuat dari Akrilik dengan ketebalan 2 mm berbentuk persegi panjang dengan ukuran lebar 7 cm, panjang 7 cm, dan tinggi 11 cm.
Pintu
Pintu Elevator juga terbuat dari Akrilik dengan ukuran tinggi 11 cm, lebar 6 cm, tebalnya 2 mm, jarak maksimal pintu terbuka 20 cm.
Motor Penggerak
Motor yang digunakan adalah motor DC 12 Volt berfungsi untuk menggerakan sangkar dan pintu Elevator. Didalam perancangan, untuk menggerakan sangkar secara vertikal motor diberi input tegangan 4,5 volt, dan untuk menggerakan sangkar secara horizontal motor diberi input tegangan sebesar 12 volt. Sedangkan untuk mengerakan pintu Elevator motor diberi input tegangan 3 volt.
As Derat
Perangkat yang dihubungkan dengan motor melalui roda gigi untuk membantu menggerakan sangkar secara vertikal (panjangnya 26 cm) dan untuk yang bergerak horizontal panjang as deratnya 26 cm.
Baud
Baud merupakan perangkat yang digunakan untuk membuka pintu dengan bantuan belt yang dipasang antara motor dengan gir yang menempel pada baud. Panjangnya 10 cm. Belt dipasang antara motor dengan gir yang menempel pada baud, berfungsi untuk menggerakan pintu. Limit Switch
Limit Switch berfungsi untuk meng-ON dan meng-OFF kan motor, baik forward ataupun revers.
Perancangan Sensor Infra Red
Gambar 3.3 Rangkaian se Perancangan Catu Daya Sistem yang dibuat meme tegangan 12 volt DC.
Gambar 3.4 Rangkaian ca Perancangan Software
Setelah perancangan selesai dibuat, kemudia yang terakhir adalah pemb untuk sistem. Untuk program penulis menggun Logo Soft, dengan mengg pemrograman Function B (FBD).
Gambar 3.5 Tampilan Pro dan FBD
sensor infra red ya
merlukan sumber
catu daya
n hardware telah dian wiring, dan mbuatan program k perancangan gunakan software ggunakan bahasa Block Diagram
rogram Logo Soft
Setelah Progr selanjutnya disim sebelum kita hubu
Gambar 3.6 Tam Simulasi
Gambar 3.7 Diagr IV. PENGUJIAN D Didalam peng dua tahap, yaitu pe tanpa program kemu program.
gram dibuat, maka simulasikan terlebih dahulu
ubungkan ke hardware.
ampilan Logo Soft saat
agram Alir Sistem
DAN ANALISA SISTEM engujian sistem dilakukan
ISU TEKNOLOGI STT MANDALA VOL.12 NO.2 DESEMBER 2017 – ISSN 1979-4818
21
Pengujian alat tanpa programDalam tahap ini penulis melakukan pengujian terhadap perangkat keras beserta rangkaiannya dengan melakukan analisa dan pengukuran.
a. Pengujian Sensor dan Relay
Untuk sensor infra red, pertama led diuji dengan menggunakan multimeter untuk mengetahui led dalam keadaan baik. Kemudian untuk relay, Jika sensor terhalang (dalam kondisi NO), maka kontak relay akan bergerak. Begitu pula sebaliknya, Itu menandakan bahwa sensor beserta relay dalam kondisi baik. b. Pengujian Catu Daya
Pengujian catu daya dilakukan dengan mengukur tegangan output pada tiap terminal tanpa beban dengan menggunakan multimeter. Catu daya dirangkai untuk mengeluarkan tegangan 12 volt . Output tegangan dari hasil pengukuran multimeter harus sesuai dengan rangkaian yang dirancang.
c. Pengujian Motor
Pengujian motor penggerak pada pintu elevator diberi tegangan 3 volt langsung dari catu daya dengan terlebih dahulu melalui kontak relay sebagai saklar. Sedangkan untuk motor penggerak sangkar arah vertikal diberi tegangan 4.5 volt, dan untuk arah yang horizontal diberi tegangan 12 volt, hasil dari pengujian motor tersebut dapat berjalan dengan baik sesuai yang diinginkan. Pengujian Alat dengan Program
Langkah awal dalam pengujian dengan menggunakan program, terlebih dahulu disimulasikan pada fasilitas yang terdapat pada software Logo soft. Kemudian memeriksa input dengan cara melihat indikator pada LCD PLC.
V. PENUTUP
Elevator jembatan penyebrangan jalan dirancang sebagai sarana transportasi yang memberikan kemudahan dan kenyamanan bagi penyebrang jalan. Ini merupakan pengembangan dari elevator yang telah ada, elevator untuk menyebrang jalan ini dapat bergerak secara vertikal dan horizontal.
Sistem otomatisasi alat ini menggunakan PLC Siemens Logo 230 RCL, dengan bahasa pemrograman Function Block Diagram (FBD). Dengan terus dikembangkannya teknologi maka akan membantu mempermudah pekerjaan manusia disegala aspek kehidupan.
Perancangan prototype elevator jembatan penyebrang jalan masih jauh dari sempurna. Oleh karena itu perlu ide dan masukan untuk pengembangan alat ini. Elevator ini bisa dikembangkan lagi dengan menerapkan counter untuk menghitung jumlah orang yang masuk kedalam sangkar dengan tampilan seven segmen.
DAFTAR PUSTAKA
Agfianto Eko Putra, 2017, PLC: Konsep, Pemrograman dan Aplikasi Omron Sysmac dan ZEN, Yogyakarta.
Budiyanto M., 2006, Pengenalan Dasar-dasar PLC,Gava Media, Yogyakarta. Frank D. Petruzella, 2006, Elektronik Industri, Andi Yogyakarta, Yogyakarta. Mitsubishi Trainning Manual, Programmable Logic Controller, Tokyo.
Iwan Setiawan, 2010, Programmable Logic Controller (PLC) dan Teknik Perancangan Sistem Kontrol, Deli.