METODE TUNING MAXIMUM PEAK – GAIN MARGIN (Mp – GM) UNTUK PENGENDALI 2DoF FEEDBACK
Nur Hidayah1), Juwari2), Renanto Handogo3) 1)
Staf Pengajar Prodi Teknik Otomotif Politeknik Hasnur
2,3)
Program Studi Teknik Kimia Institut Teknologi Sepuluh Nopember Jl. Adhyaksa No. 7 - 8 Lantai 2 Kayu Tangi Permai Banjarmasin 70125
e-mail : [email protected] ABSTRAK
Secara umum industri kimia terdiri dari unit proses yang harus dioperasikan secara spesifik untuk memberikan keuntungan maksimal dengan tetap memperhatikan keselamatan proses dan lingkungan. Berbagai struktur pengendalian one degree of freedom dikembangkan untuk mencapai tujuan tersebut. Dengan semakin kompleknya masalah pengendalian kemudian dikembangkanlah struktur two degree of freedom. Sayangnya tuning untuk struktur ini masih belum banyak. Juwari, Badhrulhisham Abdul Aziz, Chin Sim Yee, and Rosbi Mamat(2012) telah mengembangkan metode tuning yang mengimplementasikan prinsip analisa kriteria kestabilan Maximum Peak dan Gain Margin untuk mendapatkan parameter pada 2DOF-IMC standart. Metode tersebut diujikan untuk beberapa proses parametric uncertainty pada FOPDT, SOPDT serta orde tinggi dan memberikan hasil pengendalian yang sangat baik.Penelitian ini bertujuan mengimplementasikan metode tuning Mp-GM untuk struktur pengendali 2DOF PID feedback pada transfer fungsi FOPDT dengan parameter uncertainty. Pada kasus transfer fungsi FOPDT dengan variasi perbandingan dead time terhadap time constant secara keseluruhan penggunaan metode tuning Mp-GM dengan struktur 2DOF PID feedbackmenunjukkan respon yang stabil dengan IAE yang lebih kecil jika dibandingkan dengananalitycal robust tuning pada struktu pengendali PID.
Kata Kunci: Two Degree of Freedom, IMC, PID, Maximum Peak, Gain Margin PENDAHULUAN
Desain struktur pengendali two degree of freedom memiliki kelebihan dibandingkan dengan system pengendali one degree of freedom. Pada desain struktur pengendali 2DOFdapat dilakukan pegendalian perubahan set point dan disturbance rejection secara terpisah sehingga proses berjalan dengan lebih maksimal. Ada beberapa struktur pengendali yang dikembangkan berdasarkan prinsif pengendalian 2DOFseperti two degree of freedom PID (Araki dan Taguchi, 2003; Vilanova,Alvaro, danArrieta, 2011), pengendali two degree of freedom IMC
dan pengendali two degree of freedom fuzzy(Moraridan Zafiriou, 1989; Juwari, Badhrulhisham, Yee, dan Rosbi, 2013; Kaya, 2004).
Kendala yang cukup besar dari penggunaan sistem pengendali two degree of freedom terletak pada metode tuningnya. Belum terlalu banyak research metode tuning yang dikembangkan untuk sistem pengendalianini. Salah satu metode tuning terbaru yang dikembangkan untuk sistem pengendali two degree of freedom adalah dengan menggunakan spesifikasi kestabilan Maximum peak and Gain Margin untuk mendapatkan parameter pengendalian pada
pengendali 2DOF. Metode tuning yang dikembangkan oleh Juwari, Badhrulhisham Abdul Aziz, Chin Sim Yee, and Rosbi Mamat (2012) ini diberi nama “Maximum peak and gain margin
(Mp-GM) tuning
method”[4].Sayangnya implementasi metode tuning ini masih terbatas pada struktur pengendali two degree of freedom IMC. Sehingga diperlukan kajian lebih lanjut untuk mengimplementasikan Mp-GM tuning method pada struktur pengendali two degree of freedom lainnya baik itu pada pengendali 2DOF IMC ataupun pengendali 2DOF PID
METODE PENELITIAN Pada penelitian ini metode tuning Mp-GM pada struktur pengendali two degree of freedom akan dievaluasi dengan menggunakan transfer fungsi first order plus dead time (FOPDT) dengan θ/τ< 1; θ/τ> 1 dengan θ dan τ kurang dari 1 ; θ/τ> 1 dengan θ dan τ lebih dari 1.
1. First Order Plus Dead Time denganθ/τ<1
Untuksimulasidenganfungsi
transfer FOPDT denganθ/τ< 1 akandigunakanstudikasusdarisistem yang
ditelitiolehVilanovadenganθ/τ< 1, dimana [2]:
dengan θ dan τ kurang dari 1akan digunakan studi kasus dari sistem pencampuran dengan θ/τ> 1, dimana [8]: kes Gp dan 0.2s 1 18.7e0.5s Gpm 0.2s 1
Dengan parameter ketidaktepatan (uncertainty) gain proses (k) dan time delay (θ) ±20% dari model; 14,96 ≤ k ≤ 22,44
0,4 ≤ θ ≤ 0,6
3. First Order Plus Dead Time padaθ/τ> 1 dengan θdanτ> 1
Untuksimulasidenganfungsi transfer FOPDT denganθ/τ>1akandigunakanstudikas usdarisistempencampurandenganθ/τ > 1, dimana [9]: kes Gp
s 1 dan 0.0407e6.84s Gpm 3.84s 1Dengan parameter ketidaktepatan (uncertainty) gain proses (k) dan time delay (θ) ±20% dari model; -0.0488 ≤ k ≤ -0.0326
3.072 ≤ τ≤ 4.608 5.472 ≤θ ≤ 8.208
Setelah penentuan kasus, maka langkah selanjutnya adalah melakukan
kes e1.5s analisa nilai parameter gain margin dan
Gp
s 1 dan Gpm 3s 1 Dengan parameter ketidaktepatan (uncertainty) gain proses (k), konstanta waktu (τ) dan time delay (θ) ±20% dari model;0,8 ≤ k ≤ 1, 2 2,4 ≤ τ≤ 3,6 1,2 ≤ θ ≤ 1,8
2. First Order Plus Dead Time padaθ/τ> 1 denganθdanτ< 1
Untuk simulasi dengan fungsi transfer FOPDT pada θ/τ> 1
maximum peak seperti langkah metode Mp-GM yang dikembangkan oleh Juwari [4]. Penentuan nilai parameter dilakukan dengan software Matlab. Selanjutnya untuk melihat respon pengendalian, dilakukan simulasi menggunakan software simulink.
HASIL DAN PEMBAHASAN Salah satu variasi yang dikembangkan Araki untuk struktur
pengendali 2DOF PID dapat dilihat pada Gambar 1. Pada struktur pengendali ini Araki menambahkan lintasan feedback dari y (keluaran) langsung menuju u (masukan) yang akan dibandingkan dengan pengendali PID conventional (C’(s)) untuk pengendali perubahan set point dan Cb(s) yang disebut sebagai “feedback
compensator” untuk pengendali penolakan gangguan. Dimana alagoritma C’(s) dan Cb(s) dituliskan
seperti pada persamaan (1) dan (2). Untuk variabel α dan β diasumsikan sebagai parameter pengendali 2DOF dengan kisaran nilai dari 0-1 (Vilanova,Alvaro, danArrieta, 2011).
(1) (2)
Gambar 1. Diagram block tipe sistem pengendali feedback 2DOF- PID
Pada tahun 2004 ibrahim Kaya mengembangkan struktur 2DOF-IMC yang dinamakan Kaya 2DOF-IMC. Struktur Kaya 2DOF IMC didesain untuk pengendalian proses terintegrasi dengan time delay yang kecil. Selain itu struktur ini juga dikembangkan untuk mendesign metode tuning pada pengendali PD (Proportional derivative) dengan menggunakan prinsif kestabilan gain dan phase margin. Pada struktur 2DOF IMC Kaya, pengendali set point dan penolakan gangguan diletakkan pada struktur lintasan yang tertutup(Kaya, 2004).
Tujuan dilakukannya tuning pengendalian adalah untuk menentukan parameter pengendali sehingga didapatkan parameter pengendalian yang tepat pada sistem close loop agar performa pengendalian yang stabil dan robust dapat tercapai. Performa pengendalian dikatakan pada kondisi stabil dan robust jika variable pengendalian selalu padaset point yang diinginkan dan gangguan yang terjadi dapat segera dihilangkan (Marlin, 2000).Ada berbagai macam metode tuning yang telah dikembangkan untuk meningkatkan performa dan kestabilan sistem pengendalian. Perkembangan metode tuning untuk pengendali 2DoF sudah dimulai sejak struktur ini mulai dikembangkan pada tahun 1984. Salah satunya adalah pengembangan metode analytical robust tuning. Pada metode analitycal robust tuning, pengendali PI dengan faktor weighting digunakan untuk mengendalikan perubahan set point dengan transfer fungsi seperti pada persamaan (3). Pengendali jenis PID parallel dengan transfer fungsi pada persamaan (2) digunakan untuk mengendalikan gangguan.
Gambar 2. Struktur pengendali 2DOF IMC Kaya
(3) (4)
Dengan menggunakan fungsi transfer close loop dari struktur 2DOF PID Vilanova Vilanova,Alvaro, danArrieta, 2011).
Sayangnya kebanyakan metode tuning masih dikembangkan untuk proses perfect model. Juwari, dkk.,(2012) mencoba mengembangkan metode tuning untuk struktur two degree of freedom IMC dengan parameter uncertainty menggunakan prinsip kestabilan maximum peak dan gain margin. Metode tuning yang dinamakan metode tuning maximum peak gain margin (Mp-GM) ini hanya dapat digunakan pada struktur 2DOF yang memiliki dua alat pengendali. Metode tuning ini terdiri atas tiga langkah utama, yaitu:
1. Menentukanworst case dari model uncertainty.
2. Menentukan parameter pengenda- lianset point (Gc1)
menggunakankriteriakestabilanmaxi mum peak (Mp).
3. Menentukan parameter pengen- dalianpenghilangangangguan (Gc2)
menggunakankriteriakestabilangain margin (GM).
Pada struktur pengendali 2DOF PIDfeedbackakan dikorelasikan dengan struktur pengendali Kaya2DOF IMC. Diagram block untuk feedback 2DOF PID yang dibandingkan dengan diagram block struktur pengendali Kaya 2DOF IMC akan memperlihatkan kemiripan jika block transfer fungsi model (Gpm)dihubungkan dengan block
pengendali Gc1.
Dari Gambar 1, 2 dan 3 dapat diperoleh persamaan (6) dengan pendekatan matematis berdasarkan fungsi transfer tertutup struktur 2DOF PID feedback.
(5) Dengan menggunakan langkah- langkah tuning 1DOF IMC based on IMC seperti pada tuning IMC Rivera ataupun Skogestad [10]didapatkan persamaan fungsi transfer Cr(s) sebagai
pengendali set point tracking.
(6)
Gambar 3. Analogi 2DOF IMC Kaya ke dalam feedback2DOF PID
[5].
Transfer fungsi FOPDT dan pengendali set point tracking pada struktur pengendali 2DOF IMC diberikan pada persamaan (7) dan (8).
(7) (8) Untuk fungsi eksponensial dari time delay akan didekati dengan menggunakan persamaan Pade seperti pada persamaan (9).
(9) Dengan mensubstitusi persamaan (7), (8) dan (9) maka akan didapatkan bentuk pengendali Cr(s) dengan
persamaan (10) yang akan didekati ke dalam bentuk pengendali jenisproportional integral (PI) dengan bentuk fungsi transfer seperti pada persamaan (11)
Dengan parameter kc dan τI
(11) Sebagai pembanding untuk melihat performa tuning Mp-GM maka digunakan analytical robust tuning. Berdasarkan pendekatan matematis dari Untuk pengendali Cy(s) sebagai
pengendali penolakan gangguanakan digunakan bentuk pengendali PID series plus derivative filter seperti pada persamaan (12)
(12) Dengan pendekatan untuk tiap parameter pengendali adalah sebagai berikut:
persamaan pendekatan, didapatkan nilai parameter pengendali untuk Mp-GM dan ART yang disajikan pada Tabel 1.
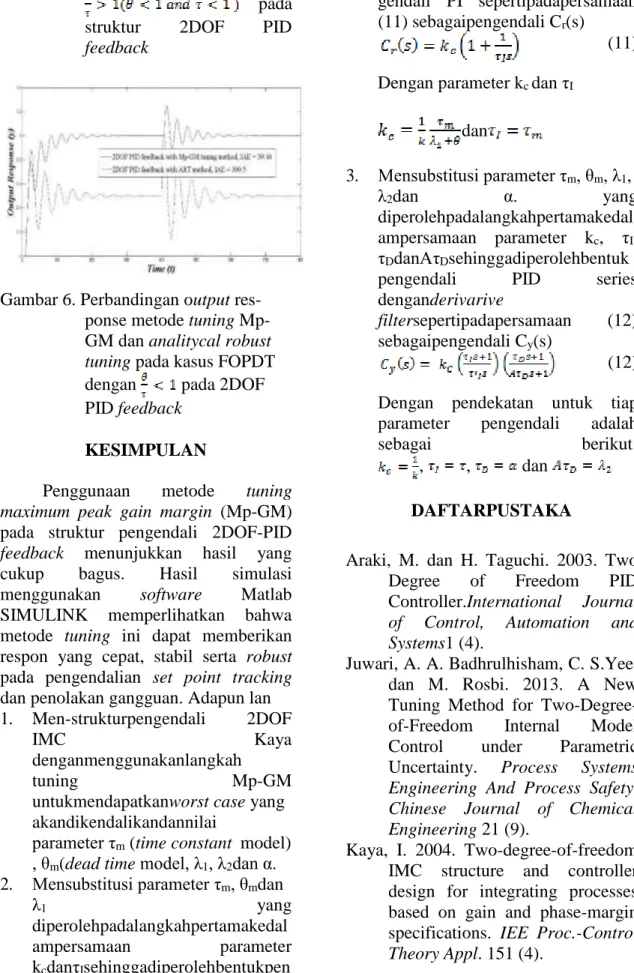
Pada metode ART, parameter pengendali untuk perubahan set point dan penolakan gangguan memiliki nilai yang sama. Berdasarkan Gambar 4, 5 dan 6 menunjukkan penggunaan tuning Mp-GM memberikan hasil yang yang lebih stabil dengan IAE lebih kecil dibandingkan dengan metode ART. Hal ini membuktikan bahwa metode Mp- GM dapat digunakan untuk proses yang mengalami penyimpangan dari permodelan prosesnya.
Tabel 1. Nilai parameter pengendali perubahan set point dan penolakan gangguan
Mp-GM
ART
Variasi Proses FOPDT Set point Penolakan Gangguan
09
pengendali 2DOF PID feedback
Gambar 4. Perbandingan output res- ponse metode tuning Mp- GM dan analitycal robust tuning pada kasus FOPDT dengan pada struktur
Gambar 5. Perbandingan output res- ponse metode tuning Mp- GM dan analitycal robust tuning pada kasus FOPDT dengan kc τI kc τI τD AτD kc τI β FOPDT dengan 1 0,7 3 0,8 2,4 3,4 2,5 0,5 2,7 1 FOPDT dengan dan 0,00 0,2 0,05 0,2 0,7 0,7 0,0007 0,13 1 FOPDT dengan dan -5,7 3,8 -20,5 4,6 10,9 9,83 -5,2 3,3 1
pada struktur 2DOF PID feedback
Gambar 6. Perbandingan output res- ponse metode tuning Mp- GM dan analitycal robust tuning pada kasus FOPDT dengan pada 2DOF PID feedback
KESIMPULAN
Penggunaan metode tuning maximum peak gain margin (Mp-GM) pada struktur pengendali 2DOF-PID feedback menunjukkan hasil yang cukup bagus. Hasil simulasi menggunakan software Matlab SIMULINK memperlihatkan bahwa metode tuning ini dapat memberikan respon yang cepat, stabil serta robust pada pengendalian set point tracking dan penolakan gangguan. Adapun lan 1. Men-strukturpengendali 2DOF
IMC Kaya
denganmenggunakanlangkah
tuning Mp-GM
untukmendapatkanworst case yang akandikendalikandannilai
parameter τm (time constant model)
, θm(dead time model, λ1, λ2dan α.
2. Mensubstitusi parameter τm, θmdan
λ1 yang diperolehpadalangkahpertamakedal ampersamaan parameter kcdanτIsehinggadiperolehbentukpen gendali PI sepertipadapersamaan (11) sebagaipengendali Cr(s) (11) Dengan parameter kc dan τI
dan 3. Mensubstitusi parameter τm, θm, λ1, λ2dan α. yang diperolehpadalangkahpertamakedal ampersamaan parameter kc, τI, τDdanAτDsehinggadiperolehbentuk
pengendali PID series denganderivarive
filtersepertipadapersamaan (12) sebagaipengendali Cy(s)
(12) Dengan pendekatan untuk tiap parameter pengendali adalah
sebagai berikut:
, , dan
DAFTARPUSTAKA
Araki, M. dan H. Taguchi. 2003. Two Degree of Freedom PID Controller.International Journal of Control, Automation and Systems1 (4).
Juwari, A. A. Badhrulhisham, C. S.Yee, dan M. Rosbi. 2013. A New Tuning Method for Two-Degree- of-Freedom Internal Model Control under Parametric Uncertainty. Process Systems Engineering And Process Safety. Chinese Journal of Chemical Engineering 21 (9).
Kaya, I. 2004. Two-degree-of-freedom IMC structure and controller design for integrating processes based on gain and phase-margin specifications. IEE Proc.-Control Theory Appl. 151 (4).
Marlin, T.E. 2000. Process Control:Designing Processes and Control Systems for Dynamic Performance.Chemical
Engineering Series. 2nd ed. McGrawHill. Boston.
Morari, M.dan E. Zafiriou. 1989.Robust Process Control.
Englewood Cliffs. Prentice –Hall. NJ.
Vilanova, R., V. M. Alvaro, dan O. Arrieta. 2011. Analitycal Robust Tuning Approach for two degree of freedom.Engineering letter, 19:3.