iii
PENGENDALIAN ELEVATOR MENGGUNAKAN
MICROCONTROLLER ATMega16
Rachman Haiykal Yassein / 0827036
Jurusan Sistem Komputer, Fakultas Teknik, Universitas Kristen Maranatha
Jalan Prof. Drg. Suria Sumantri 65
Bandung 40164, Indonesia
ABSTRAK
Kepraktisan juga kemudahan merupakan salah satu hal yang sangat dibutuhkan oleh manusia dan tidak menutup kemungkinan dalam penggunaan alat bantu transportasi vertikal yang digunakan untuk mengangkut orang atau barang.Alat bantu transportasi vertikal ini berkembang pesat. Seiring dengan perkembangan teknologi maka dibuatlah suatu alat berbasis mikrokontroler untuk merancang alat bantu transportasi vertikal yang biasa disebut lift, sehingga dapat memberi kemudahan dan kepraktisan bagi banyak orang yang menggunakannya.
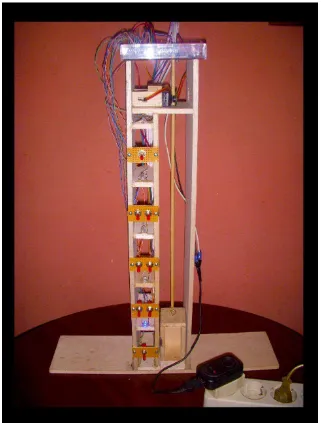
Elevator ini dirakit dalam ukuran miniatur, bahan yang digunakan adalah bahan kayu dengan ketebalan ±0.7 cm dan elevator digerakkan oleh 1 motor servo. Motor servo tesebut dikendalikan oleh mikrokontroler ATMega16. Elevator tesebut memiliki 8 buah tombol unik yang bertujuan sebagai tombol panggil atau tujuan elevator yang melayani lantai tertentu.
Prototype elevator berhasil direalisasikan sebagai contoh perhitungan elevator tanpa beban dari lantai 1 ke lantai 2 ditempuh dengan kecepatan rata – rata ±2,3 cm/detik dan contoh perhitungan elevator dengan beban penuh ( ±300gram) dari lantai 1 ke lantai 2 ditempuh dengan kecepatan rata – rata ±1,1 cm/detik.
iv
ELEVATOR CONTROL USING
MICROCONTROLLER ATMega16
Rachman Haiykal Yassein / 0827036
Department of Computer Systems, Faculty of Engineering, Universitas Kristen Maranatha
Prof road. Drg. Suria Sumantri 65 40164 Bandung, Indonesia
ABSTRACT
Basically, both practicality and easiness are what human need in every aspect of life, not to mention in the vertical means of transportation which can be used to carry people or things. This kind of transportation has been through such a vast development. As technology develops, a microcontroller-based tool is made to design a means of transportation called elevator, to give easiness and practicality for those who use it.
This elevator is assembled in a miniature size, made by using wood as material with +0.7 cm in thickness. This elevator is powered by 1 motor servo, which is controlled by a microcontroller ATMega 16. Elevator has 8 pieces intended as a unique key or destination elevator call button that serves a particular floor.
This elevator prototyped is managed to be realized as a sample calculation of an unloaded elevator moving up from 1st floor to 2nd floor that is done with the average speed of +2.3 cm/second, and also as a sample calculation of a fully loaded elevator (+300 gram) moving up from 1st floor to 2nd floor with the average speed of +1.1cm/second.
v
DAFTAR ISI
KATA PENGANTAR i
ABSTRAK iii
ABSTRACT iv
DAFTAR ISI v
DAFTAR TABEL vii
DAFTAR GAMBAR viii
BAB I PENDAHULUAN
1.1.Latar Belakang 1
1.2.Identifikasi Masalah 2
1.3.Tujuan 2
1.4.Pembatasan Masalah 2
1.5.Sistematika Penulisan 3
BAB II LANDASAN TEORI
2.1.Pengertian Elevator 4
2.2 Sejarah Elevator 7
2.3 Mikrokontroler 9
2.2.1 Kegunaan Mikrokontroler 10
2.2.2 Jenis – jenis Mikrokontoler 11
2.4 AVR ATmega 16 10
2.3.1Fitur – fitru ATmega16 12
2.3.2Konfigurasi ATmega16 12
2.5 Motor Servo 15
2.6 CodeVisionAVR 17
2.7 Sensor Magnet (Reedswitch) 18
BAB III PERANCANGAN DAN REALISASI
3.1 Perancangan Alat 21
3.1.1 Perancangan Pondasi Elevator 21
vi
3.1.3 Rangkaian Mikrokontroler 24
3.2 Performance Elevator 29
3.2.1 Aturan Gerak Dasar Elevator 30
3.3 Cara Kerja Alat 32
3.4 Pembuatan Program 34
BAB IV DATA PENGAMATAN DAN ANALISA
4.1 Pengujian Rangkaian Mikrokontroler 37
4.2 Pengujian dan Analisa Gerak Dasar Elevator 38
BAB V KESIMPULAN DAN SARAN
5.1 Kesimpulan 48
5.2 Saran 49
DAFTAR PUSTAKA 50
LAMPIRAN A
Program pada CodeVisionAVR A-1
LAMPIRAN B
vii
DAFTAR TABEL
Tabel 2.1 Fungsi khusus port B 13
Tabel 2.2 Fungsi khusus port C 14
Tabel 2.3 Fungsi khusus port D 14
Tabel 3.1 Logika gerak dasar elevator secara umum 30
Tabel 4.1 Pengujian Waktu Tempuh Elevator (tanpa beban) 41 Tabel 4.2 Pengujian Waktu Tempuh Elevator (beban penuh) 41
Tabel 4.3 Contoh Pengujian Waktu Tempuh 42
Tabel 4.4Konfigurasi Panel Satu Perintah 43
Tabel 4.5Contoh Konfigurasi Panel Satu Perintah 44
Tabel 4.6 Kecepatan Elevator dengan Satu Perintah 45
viii
DAFTAR GAMBAR
Gambar 2.1 ATmega16 11
Gambar 2.2 Pin ATmega16 13
Gambar 2.3 Rangkaian dalam motor servo 15
Gambar 2.4 Sinyal untuk mengendalikan motor servo 16
Gambar 2.5 Lebar Pulsa dan Posisi Servo 17
Gambar 2.6 CodeVisionAVR 18
Gambar 2.7 Cara kerja reed switch 19
Gambar 3.1 Blok Diagram 20
Gambar 3.2 Tampak Depan Elevator 21
Gambar 3.3 Tampak Belakang Elevator 22
Gambar 3.4 Bagian Motor Servo 22
Gambar 3.5 Pengait Besi 23
Gambar 3.6 Kayu sebagai Jalur elevator 23
Gambar 3.7 Bagian rangkaian motor servo 24
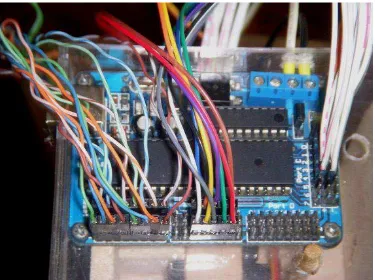
Gambar 3.8 MikroAVR16 25
Gambar 3.9 Sistem Minimum AVR ATMega16 27
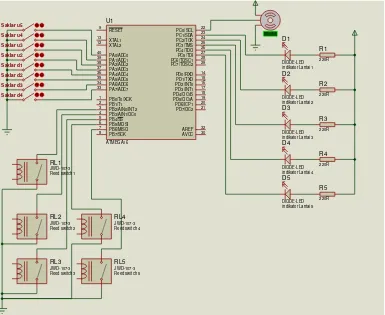
Gambar 3.10 Skema rangkaian elevator 28
Gambar 3.11 Modul MikroAVR16 29
Gambar 3.12 Power Supply mikrokontroler 29
Gambar 3.13 Panel input tombol pemilih 31
Gambar 3.14 Flowchart Utama 32
Gambar 3.15 Flowchart cek saklar dan tombol 33
Gambar 3.16 Flowchart cek tombol dan sensor magnet 34
Gambar 3.17 CodeVisionAVR 35
Gambar 3.18 Konfigurasi ATmega16 35
Gambar 3.19 Download program 36
Gambar 4.1 Prototype elevator 37
Gambar 4.2 Jarak Elevator Tiap Lantai 38
LAMPIRAN A
#include <mega16.h> #include <delay.h>
// Declare your global variables here
//===============================================// //**========== Inisialisasi Output ============**//
//===============================================// #define servo PORTC.0 // Motor servo
#define led1 PORTC.1 // Led di Lantai 1 //**============ Inisialisasi Sensor ==========**//
//===============================================// #define mgt1 PINB.2 //magnet di Lantai 1
#define mgt2 PINB.3 //magnet di Lantai 2 #define mgt3 PINB.4 //magnet di Lantai 3 #define mgt4 PINB.5 //magnet di Lantai 4 #define mgt5 PINB.6 //magnet di Lantai 5
//+++++++++++++++++++++++++++++++++++++++++++++++// //===============================================// //**============ Inisialisasi Tombol ==========**//
//===============================================// #define tbl_u5 PINA.0 //tombol up lantai 5
#define tbl_u4 PINA.1 //tombol up lantai 4 #define tbl_u3 PINA.2 //tombol up lantai 3 #define tbl_u2 PINA.3 //tombol up lantai 2 #define tbl_d1 PINA.4 //tombol down lantai 1 #define tbl_d2 PINA.5 //tombol down lantai 2 #define tbl_d3 PINA.6 //tombol down lantai 3 #define tbl_d4 PINA.7 //tombol down lantai 4
//+++++++++++++++++++++++++++++++++++++++++++++++// //===============================================// //**========== Program indikator led ==========**//
LAMPIRAN B
Gambar B-1 Prototype elevator
Gambar B-3 Rangkaian modul MikroAVR16
BAB I PENDAHULUAN
1
BAB I
PENDAHULUAN
Bab ini membahas mengenai latar belakang, identifikasi masalah, tujuan,
pembatasan masalah, dan sistematika penulisan tugas akhir.
1.1 Latar Belakang
Berbagai macam aktifitas dalam peradaban modern saat ini, bergantung
pada tersedianya dua hal kebutuhan pokok, yakni menuntut adanya perangkat
penunjang (technology) serta ketersediaan energi (power) dengan berbagai
bentuknya. Tersedianya kedua hal tersebut telah menjadi syarat dalam
menjalankan berbagai aktivitas.
Hal ini mendorong upaya untuk memindahkan sebagian pekerjaan
manusia kepada alat bantu, baik dalam bentuk mesin, perangkat elektronik atau
sejenisnya. Alat bantu yang diciptakan merupakan produk dari ilmu rekayasa
(science engineering) yang bersifat menunjang aktifitas manusia.
Namun di antara sekian banyak yang telah dapat dirasakan manfaatnya,
masih terdapat sebagian produk teknologi yang belum dapat dijangkau oleh
BAB I PENDAHULUAN 2
Universitas Kristen Maranatha
terjangkau, maupun disebabkan produk teknologi sendiri yang masih belum dapat
menjangkau ke semua lapisan. Salah satu dari kasus tersebut adalah alat
pengangkut orang atau barang yang bernama elevator atau yang biasa disebut
dengan lift. Elevator pada dasarnya adalah sebuah rakitan sistem katrol sederhana
yang menerapkan prinsip kerja hukum mekanika newtonian secara sederhana
yaitu antara gaya, massa dan gerakan. Sistem katrol dalam elevator diatur
sedemikan rupa sehingga dapat digerakkan untuk mengangkut beban berat dengan
tenaga yang cukup kecil.
1.2 Identifikasi Masalah
Bagaimana merancang dan membuat simulasi lift atau elevator (barang)
menggunakan ATmega16 ?
I.3 Tujuan
Merancang dan membuat simulasi lift atau elevator (barang)
menggunakan ATmega16.
I.4 Pembatasan Masalah
Agar permasalahan tidak meluas dan tidak menyimpang dari tujuan, maka
perlu diadakan suatu pembatasan meliputi :
1. Simulator lift atau elevator dirancang hanya untuk satu car elevator
dengan sebanyak lima lantai tanpa menggunakan simulasi pintu.
2. Pemrograman lift atau elevator dibatasi dengan menggunakan satu
perintah berkala dalam sekali eksekusi program.
BAB I PENDAHULUAN 3
Universitas Kristen Maranatha
4. Menggunakan Software CodeVisionAVR untuk memprogram juga untuk downloader program.
5. Menggunakan motor servo sebagai penggerak lift atau elevator.
6. Input tombol kendali hanya dapat digunakan 1x panggilan.
I.5 Sistematika Penulisan
Sistematika penulisan laporan tugas akhir ini disusun dalam lima BAB,
yaitu sebagai berikut:
BAB I : PENDAHULUAN
Bab ini membahas tentang latar belakang, identifikasi masalah,
tujuan, pembatasan masalah, dan sistematika penulisan.
BAB II : LANDASAN TEORI
Bab ini membahas tentang dasar-dasar teori penunjang
perancangan lift atau elevator yang meliputi pemahaman dasar
elevator, microcontroller, ATmega16, Motor servo,
CodeVisionAVR, dan Sensor Magnet (reed switch).
BAB III : PERANCANGAN DAN REALISASI
Bab ini membahas tentang Perancangan lift atau elevator
(barang) menggunakan ATmega16.
BAB IV : DATA PENGAMATAN DAN ANALISIS
Bab ini membahas pengamatan, pengujian, dan analisa data dari
perangkat keras dan perangkat lunak yang telah dirancang
BAB V : KESIMPULAN DAN SARAN
Bab ini merupakan bab penutup yang memuat tentang kesimpulan
48
BAB V
KESIMPULAN DAN SARAN
Bab ini merupakan bab penutup yang memuat tentang kesimpulan dan saran.
5.1 Kesimpulan
Prototype ini diharapkan mempunyai prospek yang baik bagi sistem
pengontrolan elevator. Dalam perancangan ini masih perlu dipelajari lebih lanjut
bagi penggunaan dan pengembangannya.
Berdasarkan hasil yang diperoleh dari bab-bab sebelumnya, maka dapat
ditarik kesimpulan sebagai berikut:
Perancangan prototype elevator (barang) dalam ukuran miniatur
berhasil direalisasikan.
Jika dalam satu waktu ada dua pemanggilan, elevator akan berjalan
terus-menerus tanpa ada batasnya, sehingga itu yang menjadi
kekurangan dari prototype ini juga penggunaan dua tombol pada panel
BAB V KESIMPULAN DAN SARAN 49
Universitas Kristen Maranatha
Elevator pada saat berkerja kurang sempurna ketika pemberhentiannya
dikarenakan sensor magnet yang sangat mudah sekali terkena pengaruh
magnet. sehingga terjadi kesalahan posisi elevator tidak pas sesuai
posisi seharusnya.
Dalam pembuatan instrumentasi khususnya hardware sangat diperlukan
ketepatan dan ketelitian pengukuran secara detail, agar dapat
mengurangi kesalahan saat pengujiannya.
5.2 Saran
Saran penulis berharap teknologi pengontrol elevator dapat dikembangkan
terus aplikasinya, terutama dalam penambahan dan pengembangan program
instruksi, kemudian dari segi tampilan, ketepatan, kecepatan, keamanan juga
kenyamanan transportasi elevator dalam mengembangkan teknologi ini.
Mengingat saat-saat sekarang banyak bermunculan gedung pencakar langit
yang didesain sedemikian rupa dengan jumlah dan kapasitas lantai yang banyak,
maka sangat diperlukan adanya perubahan teknologi transportasi elevator agar
50
DAFTAR PUSTAKA
Winoto, Ardi. Mikrokontroler AVR ATmega8/32/16/8538 dan pemrogramannya
dengan Bahasa C pada WinAVR. Bandung: Informatika. 2008.
Adrianto, Heri. Pemrograman Mikrokontroler AVR ATMEGA16 menggunakan
Bahasa C. Bandung: Informatika. 2008.
Sons & Wiley, John. “The Vertical Transportation Hand Book” Canada 2010.
http://engineersgarage.com/electronic-components/atmega16-microcontroller, 11
Februari 2012
http://todbot.com/blog/2009/04/11/tiny-servos-as-continuous-rotation-gearmotors/, 3
Januari 2012
http://electrocontrol.wordpress.com/2011/05/05/mengakses-motor-servo/, 22
Desember 2011
http://scribd.com/doc/38052767/The-Vertical-Transportation-Handbook