TUGAS AKHIR
J. ANDERSON TAMPUBOLON
042408069
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
AT89S8252
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh Ahli Madya
J. ANDERSON TAMPUBOLON 042408069
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : PENGENDALIAN PINTU GERBANG
MENGGUNAKAN MIKROKONTROLER AT89S8252
Kategori : TUGAS AKHIR
Nama : J. ANDERSON TAMPUBOLON
Nomor Induk Mahasiswa : 042408069
Program Studi : DIPLOMA III FISIKA INSTRUMENTASI
Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN
ALAM (FMIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di
Medan, 01 Agustus 2007
Diketahui
Departemen Fisika FMIPA USU
Ketua, Pembimbing,
DR. Marhaposan Situmorang Dra. Justinon, MSi
PERNYATAAN
PENGENDALIAN PINTU GERBANG MENGGUNAKAN MIKROKONTROLER AT89S8252
TUGAS AKHIR
Saya mengakui bahwa Tugas Akhir ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, 01 Agustus 2007
Bab 4 Pengujian Alat dan Program 43
4.1 Pengujian Rangkaian Mikrokontroler AT89S8252 43
4.2 Pengujian Driver Motor Stepper 44
4.3 Pengujian Rangkaian Penguat 46
4.4 Pengujian Rangkaian DTMF Decoder 46
4.5 Pengujian Rangkaian Buzzer 47
Bab 5 Kesimpulan dan Saran 49
5.1 Kesimpulan 49
5.2 Saran 49
Daftar Pustaka 50
Lampiran A. Rangkaian Lengkap 51
DAFTAR TABEL
Halaman
Tabel 2.1 Frekuensi dan Tombol yang di Tekan 7
Tabel 2.2 Fungsi Khusus pada Port 1 AT89S8252 11
DAFTAR GAMBAR
Halaman
Gambar 2.1 Mikrokontroler Atmel AT89S8252 10
Gambar 2.2 Software ISP-Flash Programmer 19
Gambar 2.3 Open File 20
Gambar 2.4 Proses Penulisan Bilangan Heksadesimal ke Mikrokontroler 21
Gambar 2.5 Transistor sebagai Saklar ON 23
Gambar 2.6 Transistor sebagai Saklar OFF 24
Gambar 2.7 IC HT9170 25
Gambar 2.8 Diagram Motor Langkah (Stepper) 27
Gambar 2.9 Pemberian Data/Pulsa pada Motor Stepper 28
Gambar 3.1 Diagram Blok Rangkaian 29
Gambar 3.2 Rangkaian Power Supplay (PSA) 31
Gambar 3.3 Rangkaian Minimum Mikrokontroler AT89S8252 33
Gambar 3.4 Rangkaian Driver Motor Stepper 34
Gambar 3.5 Rangkaian Tombol Manual 36
Gambar 3.6 Rangkaian Saklar Batas 37
Gambar 3.7 Rangkaian Penguat 38
Gambar 3.8 Rangkaian DTMF Decoder 39
Gambar 3.9 Rangkaian Buzzer 40
Gambar 3.10 Flowchart 41
PENGHARGAAN
Puji dan syukur saya panjatkan kepada Tuhan Yang Maha Pemurah dan Maha Penyayang, dengan limpah karunia-Nya kertas kajian ini berhasil diselesaikan dalam waktu yang telah ditetapkan.
Ucapan terima kasih saya sampaikan kepada Dra. Justinon, MSi selaku pembimbing pada penyelesaian Pengendalian Pintu Gerbang Menggunakan Mikrokontroler AT89S8252 ini yang telah memberikan panduan dan penuh kepercayaan kepada saya untuk menyempurnakan kajian ini. Panduan ringkas, padat dan professional telah diberikan kepada saya agar dapat menyelesaikan tugas ini. Ucapan terima kasih juga ditujukan kepada Ketua dan Sekretaris Departemen Fisika, DR. Marhaposan Situmorang dan Dra. Justinon, MSi, Dekan dan Pembantu Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara, semua dosen pada Departemen Fisika FMIPA USU, pegawai di FMIPA USU, dan rekan-rekan kuliah. Akhirnya, tidak terlupakan kepadan Bapak, Ibu dan semua sana-keluarga yang selama ini memberikan bantuan dan dorongan yang diperlukan.
Semoga Tuhan Yang Maha Esa akan membalasnya.
ABSTRAK
Telah dirancang sebuah simulasi alat pengaman gerbang dengan menggunakan password dari handphone yang berbasis IC Mikrokontroler AT89S8252. Dekoder DTMF digunakan untuk mengubah sinyal DTMF dari handphone dalam bentuk kode biner agar dapat dibaca oleh mikrokontroler AT89S8252. Alat ini dapat diaplikasikan sebagai sitem buka atau tutup gerbang yang dapat dikontrol dari jarak jauh maupun dekat. Alat ini juga dapat mengeluarkan bunyi atau sirene apabila password masukannya salah, hal ini bertujuan untuk menghindari pemakaian alat dari orang yang tidak diinginkan.
THE GATE A DOOR CONTROLLER USING MICROCONTROLLER AT89S8252
ABSTRACT
BAB 1
PENDAHULUAN
1.1Latar Belakang
Suatu sistem pengamanan adalah hal yang sangat didambakan oleh setiap orang, baik
di rumah ataupun di kantor. Berbagai bentuk cara yang dilakukan orang untuk
mengamankan rumah ataupun kantornya. Seperti membuat suatu tembok untuk
memagari rumah ataupun kantornya tersebut dengan menggunakan beton atau besi.
Tentunya sebagai jalan masuk atau keluar diperlukan suatu gerbang. Gerbang tersebut
biasanya dijaga oleh seorang petugas seperti halnya satpam. Permasalahan yang
mungkin terjadi dengan menggunakan sistem keamanan seperti ini adalah
mungkinkah satpam tadi tetap berada di dekat gerbang tersebut kapanpun kita
butuhkan? Tentu suatu hal yang belum pasti. Adalah suatu hal yang sangat
menjenuhkan kalau kita sampai menunggu untuk waktu yang begitu lama hingga
gerbang di buka. Masalah lain yang timbul yaitu ketika hari sedang hujan dan kita
harus turun dari kendaraan untuk membuka gerbang. Dari penjelasan ini dapat
disimpulkan bahwa komunikasi antara pemilik rumah dengan gerbang ternyata
sangatlah penting.
Komunikasi merupakan salah satu kebutuhan manusia yang sangatlah penting
karena dengan berkomunikasi manusia dapat saling bertukar informasi satu dengan
yang lainnya. Salah satu komunikasi jarak jauh yang sering digunakan adalah melalui
pengiriman data yaitu dengan sistem DTMF (Dual Tone Multiple Frequency). Data ini
dapat di kirim melalui tombol keypad yang terdapat pada HP.
Sistem pengiriman data menggunakan sinyal DTMF merupakan sistem
pengiriman data dengan dua sinyal frekuensi, yaitu frekuensi tinggi dan frekuensi
rendah. Jika diperhatikan suara dari tiap tombol nomor telepon yang ditekan akan
menghasilkan suara yang berbeda hal ini dapat kita ukur dengan menggunakan
osiloskop. Oleh sebab itu, saya mencoba untuk merancang suatu alat yang dapat
diaplikasikan atau digunakan pemilik rumah untuk berinteraksi dengan gerbang
tersebut baik dari jarak jauh maupun dari jarak dekat.
Alat ini menggunakan kode pengaman atau password, untuk mencegah
penggunaan alat dari orang yang tidak dikehendaki. Alat ini juga dapat digunakan
secara manual.
1.2Batasan Masalah
Batasan masalah dalam penulisan Tugas Akhir ini adalah sebagai berikut :
1. Mikrokontroler yang digunakan adalah jenis AT89S8252
2. Motor penggerak yang digunakan adalah jenis motor stepper
3. Password yang digunakan sebanyak 3 digit
1.3Tujuan Penulisan
Tujuan dari penulisan ini adalah sebagai berikut :
1. Memanfaatkan mikrokontroler AT89S8252 untuk mengenali nilai-nilai
yang dikirimkan oleh handphone dan mengendalikan pergerakan motor
stepper
2. Merancang pintu gerbang otomatis yang dapat dikendalikan melalui
handphone.
1.4Manfaat Penulisan
Manfaat dari penulisan ini adalah sebaai berikut :
1. Membuat suatu sistem keamanan otomatis untuk tanggap keamanan di
rumah/kantor dengan menggunakan handphone
2. Untuk memahami penggunaan Mikrokontroler AT89S8252 sebagai kontrol
kendali.
1.5Metodologi Penulisan
Metodologi penulisan yang digunakan adalah sebagai berikut :
1. Studi kepustakaan
2. Konsultasi
3. Pengumpulan peralatan dan komponen
4. Perakitan/pembuatan alat
5. Pengujian alat
1.6 Lokasi Pembuatan Alat
Pengerjaan alat dilakukan di Laboratorium Elektronika Dasar FMIPA USU Medan.
1.7 Sistematika Penulisan
Agar pembahasan pada Tugas Akhir ini lebih terperinci dan terarah maka penulisan
Tugas Akhir ini di susun dengan sistematika sebagai berikut :
BAB 1 : PENDAHULUAN,
Berisikan tentang latar belakang masalah, batasan masalah, tujuan
penelitian, manfaat penelitian, metodologi penelitian, lokasi penelitian
dan sistematika penulisan.
BAB 2 : TEORI DASAR DAN PENDUKUNG,
Berisikan tentang teori dasar yang perlu diketahui untuk
mempermudah dalam pemahaman prinsip kerja dari rangkaian pada
sistem yang berisikan penjelasan mengenai DTMF, Mikrokontroler
AT89S8252, instruksi-instruksi AT89S8252 serta beberapa rangkaian
pendukung lainnya pada alat ini.
BAB 3 : PERANCANGAN ALAT,
Berisikan tentang dasar-dasar teori sebagai landasan perancangan
rangkaian, di mulai dari pembuatan diagram blok sampai pembuatan
rangkaian alat yang digunakan untuk menjalankan mikrokontroler
AT89S8252.
BAB 4 : PENGUJIAN ALAT,
Berisikan tentang pengujian dan analisa dari sistem/rangkaian pada
BAB 5 : KESIMPULAN DAN SARAN,
Berisikan tentang kesimpulan yang diperoleh dari penelitian ini baik itu
keuntungan maupun kerugian alat yang digunakan dan saran dari
penulis untuk pengembangan penelitian ini dikemudian hari.
BAB 2
TEORI DASAR DAN PENDUKUNG
2.1 Telepon Dual Tone Multi Frequency (DTMF)
Setelah beralih ke teknologi digital, cara meminta nomor sambungan telepon tidak
lagi dengan cara memutar piringan angka tetapi dengan cara memencet tombol-tombol
angka. Cara ini dikenal sebagai Touch Tone Dialing, sering juga disebut sebagai
DTMF ( Dual Tone Multiple Frequency ).
Telepon PSTN maupun handphone saat ini menggunakan sistem DTMF yaitu
Dual Tone Multiple Frequency. Dual Tone Multiple Frequency adalah teknik
mengirimkan angka-angka pembentuk nomor telepon yang di-kode-kan dengan 2
nada yang dipilih dari 8 buah frekuensi yang sudah ditentukan. Telepon PSTN pada
umumnya memiliki 10 buah tombol di tambah tombol * dan # jadi jumlahnya adalah
12. Sebenarnya disamping 12 angka dan simbol tersebut masih ada 4 huruf yang bisa
kita letakan di sana katakanlah A, B, C, dan D. Jadi semuanya terdapat 16 tombol. Di
dalam komunikasi ke enambelas tombol tersebut dikirimkan dengan 2 frekuensi yang
berbeda. Satu frekuensi masuk ke dalam frekuensi tinggi dan satu lagi masuk ke
dalam grup frekuensi rendah. Masing-masing grup memiliki 4 macam variasi (nilai
frekuensi) sinyal sehingga dengan 2 grup frekuensi tadi dapat di kodekan 16 (4
Tabel 2.1 Frekuensi dan Tombol yang di Tekan Frekuensi
Rendah
Frekuensi
Tinggi
Tombol yang
ditekan
697 Hz 1209 Hz 1
697 Hz 1366 Hz 2
697 Hz 1477 Hz 3
697 Hz 1633 Hz A
770 Hz 1209 Hz 4
770 Hz 1366 Hz 5
770 Hz 1477 Hz 6
770 Hz 1633 Hz B
852 Hz 1209 Hz 7
852 Hz 1366 Hz 8
852 Hz 1477 Hz 9
852 Hz 1633 Hz C
941 Hz 1209 Hz *
941 Hz 1366 Hz 0
941 Hz 1477 Hz #
2.2 Mikrokontroler
Dalam perancangan alat sebagai suatu sistem pengaman gerbang dengan
menggunakan password dari handphone, dengan menggunakan mikrokontroler
AT89S8252. Mikrokontroler pada dasarnya adalah mikrokomputer yang memiliki
kelebihan dalam mengendalikan peralatan luar secara otomatis. Proses kerja
mikrokontroler di atur oleh mikroprosessor yang merupakan ‘otak’ dari setiap operasi
yang dilakukan. Mikrokontroler sebagai suatu terobosan teknologi mikrokontroler dan
mikrokomputer, hadir memenuhi kebutuhan pasar (market need) dan teknologi baru.
Sebagai teknologi baru, yaitu mikrokontroler teknologi semikonduktor dengan
memuat kandungan transistor yang lebih banyak dalam ruang kecil serta dapat di
produksi secara massal (dalam jumlah banyak) sehingga harga menjadi lebih murah
(dibandingkan mikroprossesor). Sebagai kebutuhan pasar, mikrokontroler hadir untuk
memenuhi selera industri dan para konsumen akan kebutuhan dan keinginan alat-alat
bantu dan mainan yang lebih canggih serta dalam bidang pendidikan.
Tidak seperti sistem komputer, yang mampu menangani berbagai macam
program aplikasi (misalnya pengolah kata, pengolah angka, dan lain sebagainya).
Mikrokontroler hanya bisa digunakan untuk satu aplikasi tertentu saja. Perbedaan
lainnya terletak pada perbandingan RAM dan ROM-nya. Pada sistem komputer
perbandingan RAM dan ROM-nya besar, artinya program-program pengguna di
simpan dalam ruang RAM yang relatif besar, sedangkan rutin-rutin antarmuka
perangkat keras di simpan dalam ruang ROM yang kecil. Sedangkan pada
mikrokontroler, perbandingan ROM dan RAM-nya yang besar artinya program
digunakan sebagai tempat penyimpanan sederhana sementara, termasuk
register-register yang digunakan pada mikrokontroler yang bersangkutan.
Pada sub-bab ini akan di bahas secara khusus yang berhubungan dengan yang
digunakan dalam penelitian ini yaitu mikrokontroler AT89S8252. Mikrokontroler
AT89S8252 merupakan keluarga dari MCS-51 keluaran Atmel. Hal-hal yang terdapat
pada penjelasan mikrokontroler MCS-51 juga berlaku untuk mikrokontroler
AT89S8252.
Beberapa fasilitas yang dimiliki oleh mikrokontroler AT89S8252 adalah
sebagai berikut :
1. Kompatibel dengan mikrokontroler MCS-51
2. 8 Kbyte Downloadable Flash Memori
3. 2 Kbyte EPROM
4. 3 Level program memori lock
5. 256 byte RAM internal
6. 32 I/O yang dapat dipakai semua
7. Programable UART (serial port)
8. 3 alat Timer/Counter 16 bit
9. SPI Serial Interface
10.Programable Watchdog Timer
11.Dual Data Pointer
12.Frekuensi kerja 0 sampai 24 MHz
13.Tegangan operasi 2,7 Volt sampai 6 Volt
Terlihat bahwa mikrokontroler AT89S8252 memiliki banyak fitur yang
menguntungkan. Dipakainya Downloadable flash memori memungkinkan
mikrokontroler ini bekerja sendiri tanpa tambahan chip lainnya. Sementara flash
memorinya mampu di program hingga seribu kali. Hal lain yang menguntungkan
adalah sistem pemograman menjadi lebih sederhana dan tidak memerlukan rangkaian
yang rumit seperti rangkaian untuk memprogram produk Atmel lainnya.
Gambar berikut dalah gambar mikrokontroler Atmel AT89S8252. Tata letak
pin-pin ini masih mengacu pada mikrokontroler MCS-51. Sehingga AT89S8252 dapat
mengggantikan mikrokontroler MCS-51.
Gambar 2.1 Mikrokontroler Atmel AT89S8252
Semua pin pada mikrokontroller Atmel AT89S8252 adalah sama dengan
mikrokontroller MCS-51. Namun pada port 1 mikrokontroller Atmel AT89S8252
terdapat beberapa fungsi khusus yang tidak terdapat pada mikrokontrololer MCS-51.
Adapun fungsi khusus tersebut adalah sebagai berikut:
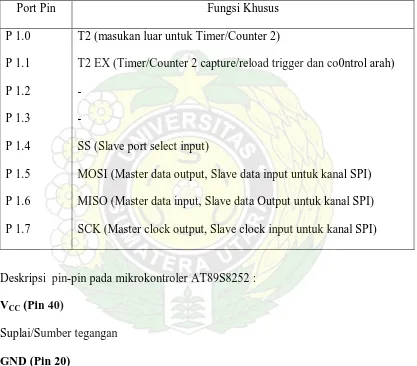
Tabel 2.2 Fungsi Khusus pada Port 1 AT89S8252
Port Pin Fungsi Khusus
P 1.0
T2 (masukan luar untuk Timer/Counter 2)
T2 EX (Timer/Counter 2 capture/reload trigger dan co0ntrol arah)
-
-
SS (Slave port select input)
MOSI (Master data output, Slave data input untuk kanal SPI)
MISO (Master data input, Slave data Output untuk kanal SPI)
SCK (Master clock output, Slave clock input untuk kanal SPI)
Deskripsi pin-pin pada mikrokontroler AT89S8252 :
VCC (Pin 40)
penerima kode byte pada saat flash progamming pada fungsi sebagai I/O biasa port ini
dapat memberikan output sink ke delapan buah TTL input atau dapat di ubah sebagai
multiplex address/data, port ini akan mempunyai internal pull up. Pada saat flash
progamming diperlukan eksternal pull up, terutama pada saat verifikasi program.
Port 2 (Pin 21 – Pin 28)
Port 2 berfungsi sebagai I/O biasa atau high order address. Pada saat mengakses
memori 8 bit, port ini akan mengeluarkan isi dari P2 special function register. Port ini
mempunyai internal pull up dan berfungsi sebagai input dengan memberikan logika 1.
Sebagai output, port ini dapat memberikan output sink keempat buah input TTL.
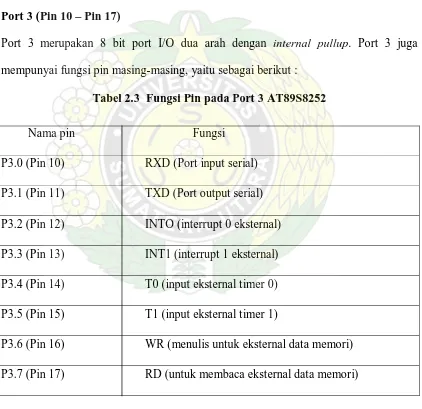
Port 3 (Pin 10 – Pin 17)
Port 3 merupakan 8 bit port I/O dua arah dengan internal pullup. Port 3 juga
mempunyai fungsi pin masing-masing, yaitu sebagai berikut :
Tabel 2.3 Fungsi Pin pada Port 3 AT89S8252 Nama pin Fungsi
P3.0 (Pin 10) RXD (Port input serial)
P3.1 (Pin 11) TXD (Port output serial)
P3.2 (Pin 12) INTO (interrupt 0 eksternal)
P3.3 (Pin 13) INT1 (interrupt 1 eksternal)
P3.4 (Pin 14) T0 (input eksternal timer 0)
P3.5 (Pin 15) T1 (input eksternal timer 1)
P3.6 (Pin 16) WR (menulis untuk eksternal data memori)
RST (Pin 9)
Reset akan aktif dengan memberikan input high selama 2 cycle.
ALE/ PROG (Pin 30)
Address latch Enable adalah pulsa output untuk me-latch byte low dari alamat selama
mengakses memori eksternal. Selain itu, sebagai pulsa input progam (PROG) selama
memprogam Flash.
PSEN (Pin 29)
Progam store enable digunakan untuk mengakses memori progam eksternal.
EA (Pin 31)
Pada kondisi low, pin ini akan berfungsi sebagai EA yaitu mikrokontroler akan
menjalankan progam yang ada pada memori eksternal setelah sistem direset. Jika
kondisi high, pin ini akan berfungsi untuk menjalankan progam yang ada pada
memori internal. Pada saat flash progamming, pin ini akan mendapat tegangan 12
Volt.
XTAL 1 (Pin 19)
Input untuk clock internal.
XTAL 2 (Pin 18)
Output dari osilator.
2.3 Data Memori (EEPROM) dan RAM
Berbeda dengan mikrokontroler standard MCS-51, mikrokontroler Atmel AT89S8252
juga dilengkapi dengan data memori yang berupa EEPROM (Electrically Erasable
Programmable Read Only Memori). EEPROM yang ditanamkan ini besarnya 2K byte
EEPROM on-chip ini diakses dengan mengeset bit EEMEN pada register
WMCON pada alamat 96H. Alamat EEPROM ini adalah 000H sampai 7FFH.
Instruksi movx digunakan untuk mengakses EEPROM internal ini. Namun jika ingin
mengakses data memori luar (diluar mikrokontroler Atmel AT89S8252) dengan
menggunakan instruksi movx ini maka bit EEMEN harus dibuat ‘0’.
Bit EEMWE pada register WMCON harus diset ke 1 sebelum sebarang lokasi
pada EEPROM dapat ditulis. Program pengguna harus mereset bit EEMWE ke ‘0’
jika penulisan ke EEPROM tidak diperlukan lagi. Proses penulisan ke EEPROM dapat
dilihat dengan membaca bit RDY/BSY pada SFR WMCON. Jika bit ini berlogika
rendah maka berarti penulisan EEPROM sedang berlangsung, jika bit ini berlogika
tinggi berarti penulisan sudah selesai dan penulisan lain dapat dimulai lagi. Sedangkan
RAM yang ada pada mikrokontroler Atmel AT89S8252 adalah berkapasitas 256 byte.
2.4 Instruksi pada Mikrokontroler AT89S8252
Adapun keuntungan menggunakan mikrokontroler AT89S88252 yaitu dapat
membantu kita membuat alat dengan program yang relatif sederhana yang mana
mikrokontroler ini menggunakan Downlodable Flash Memory. Bahkan tidak
diperlukan komponen apapun untuk memprogram mikrokontroler AT89S8252.
Beberapa komponan dasar yang dipakai seperti resistor dan kapasitor sebenarnya
hanya untuk menyediakan reset pada catu daya mulai diberikan. Flash memory yang
Pada mikrokontroller AT89S8252 terdapat 8K byte in-system reprogramable
flash PEROM Code memori dan 2K byte EEPROM Data Memori. Flash PEROM
Code Memori digunakan untuk menyimpan program yang telah kita buat. Sedangkan
EEPROM Data Memori digunakan untuk menyimpan data.
Penulisan program tersebut dengan menggunakan bahasa pemrograman
Asembly. Beberapa instruksi yang terdapat dalam pemrograman pada mikrokontroler
jenis AT89S8252 adalah sebagai berikut :
1. Add
Instruksi untuk melakukan operasi penjumlahan pada dua buah data yang terdapat
pada alamat register yang ditunjuk oleh instruksi.
Cth : DD A, Rn
Instruksi ini melakukan operasi penjumlahan data pada Akumulator dengan data pada
alamat register RN (n0...7) dan hasilnya disimpan di Akumulator.
2. Call
Instruksi untuk melakukan panggilan terhadap instruksi yang terdapat di dalam
subrutin yang ditunjuk. Setelah menjalankan instruksi-instruksi tersebut, program
akan melanjutkan kembali instruksi yang terdapat pada program utama.
a. Acall; instruksi ini melakukan panggilan pada subrutin yang ditunjuk dengan
jangkauam kurang dari 2 Kbyte.
b. Lcall ; Instruksi ini melakukan panggilan pada subrutin yang ditunjuk dengan
3. Cjne (Compare and Jump if Not Equal)
Instruksi ini melakukan perbandingan antara data sumber dengan data tujuan. Bila
datanya sama maka lanjutkan ke instruksi di bawahnya, bila data tidak sama maka
jump ke alamat yang dituju.
Format instruksi : Cjne data tujuan, data sumber, alamat input
4. Clr (Clear)
Instruksi ini memberi data 0 pada alamat register yang ditunjuk.
Contoh : Clr A
Instruksi ini memberi data 0 pada akumulator.
5. Cpl (Complement)
Instruksi ini melakukan operasi komplemen pada alamat registeryang ditunjuk.
Contoh : Cpl C
Data pada arry flag dikomplemenkan.
6. Dec (Decremant)
Instruksi ini malakukan operasi pengurangan dengan nilai 1 pada data yang terdapat
pada alamat register yang ditunjuk oleh instruksi dan menyimpannya pada register
tersebut.
Contoh : Dec A
Data pada akumulator dikurangi dengan 1 dan hasilnya disimpan di akumulator.
7. Div (Divide)
Instruksi ini melakukan operasi pembangunan pada dua buah data yang terdapat pada
alamat register yang ditunjuk oleh instruksi.
Contoh : Div AB
Data dari akumulator dibagi dengan data pada register B, hasilnya disimpan di
8. Djnz (Decrement and Jump if Not Zero)
Instruksi ini melakukan operasi pengurangan pada alamat register serbaguna
(r0...R7) yang ditunjukkan dengan nilai 1 dan akan jump bila hasil dari pengurangan
itu nilainya tidak sama dengan nol.
Contoh : Djnz Rn, subrutin
Instruksi ini melakukan operasi pengurangan pada alamat register (R0...R7) dengan 1
dan melompat ke subrutin jika hasilnya bukan nol. Akan tetapi jika hasilnya sama
dengan nol maka program akan menjalankan instruksi di bawahnya.
9. Inc (Increment)
Instruksi ini melakukan operasi penjumlahan dengan nilai 1 pada data yang terdapat
pada alamat register yang ditunjukkan oleh instruksi dan menyimpannya pada alamat
register tersebut.
Contoh : Inc A
Instruksi ini menjumlahkan data akumulator dengan 1 dan hasilnya disimpan di
akumulator.
10. Jb (Jump on Bit set)
Instruksi ini melakukan pengujian bit pada alamat bit yang ditunjukkan. Jika data bit
1 maka program tersebut akan melompat ke subrutin yang ditunjukolah instruksi.
Akan tetapi bila data bit 0 maka program akan menjalankan instruksi di bawahnya
atau selanjutnya.
11. Jnb (Jump on Not Bit set)
Instruksi ini melakukan pengujian bit pada alamat bit yang ditunjuk. Jika data bit
Bila data bit bernilai 1 maka program akan menjalankan instruksi di baahnya atau
selanjutnya.
12. Jmp (Jump)
Instruksi ini melakukan lompatan pada alamat kode yang ditunjuk.
a. Ajmp ( Absolute Jump) ; Instruksi ini melakukan lompatan ke subrutin yang
ditunjuk sejauh maksimum 11 bit dari alamat yang ditentukan.
b. Ljmp (Long Jump) ; instruksi ini melakukan lompatan ke subrutin yang
ditunjuk sejauh maksimum 16 bit dari alamat yang ditentukan.
c. Sjmp (Short jump ) ; instruksi ini melakukan lompatan ke subrutin yang
ditunjuk sejauh maksimum 128 byte dari alamat yang ditentukan.
13. Jnz (Jump if Not Zero)
Instruksi ini melakukan pengujian data pada akumulator. Jika data pada akumulator
tidak sama dengan 00H maka progam akan melompat ke subrutin yang ditunjuk.
Akan tetapi jika data pada akumulator sama dengan 00H maka program akan
menjalankan instruksi di bawahnya atau selanjutnya.
14. Jz (Jump if Zero)
Instruksi ini melakukan pengujian data pada akumulator. Jika data pada akumulator
tidak sama dengan 00H maka progrm akan menjalankan instruksi di bawahnya atau
selanjutnya, tapi jika data pada akumulator sama dengan ooH maka program akan
melompat ke subrutin yan ditunjuk.
15. Mov
Instruksi ini melakukan operasi peminhdahan data dari alamat register satu ke alamat
register lainnya.
Instruksi ini melakukan operasi pemindahan data dari alamat register Rn (n=0…7) ke
dalam akumulator.
16. Nop
Instruksi ini akan melakukan delay sebesar 1 cycle atau 1 siklus.
17. Ret (Return)
Instruksi ini digunakan untuk kembali ke subrutin.
18. Setb
Instruksi ini melakukan operasi set pada bit yang ditunjuk oleh register.
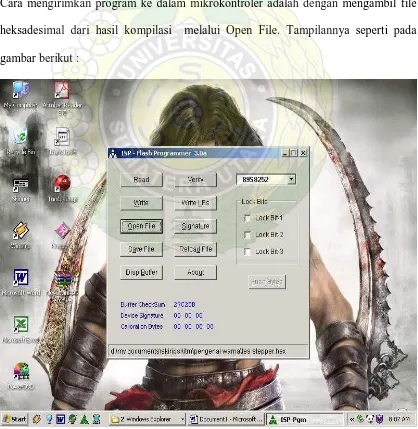
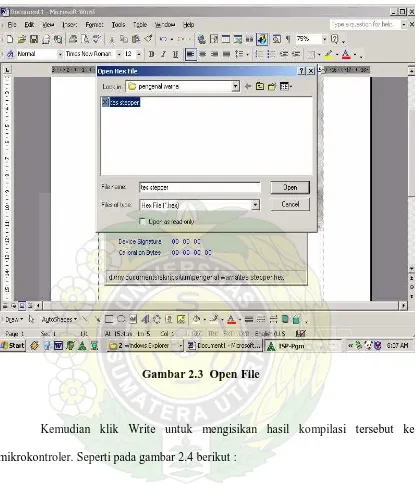
Cara mengirimkan program ke dalam mikrokontroler adalah dengan mengambil file
heksadesimal dari hasil kompilasi melalui Open File. Tampilannya seperti pada
gambar berikut :
Gambar 2.3 Open File
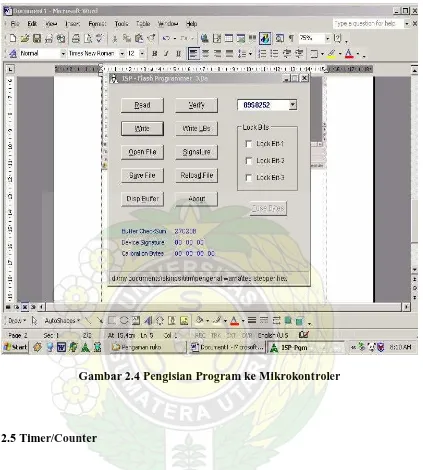
Kemudian klik Write untuk mengisikan hasil kompilasi tersebut ke
Gambar 2.4 Pengisian Program ke Mikrokontroler
2.5 Timer/Counter
Pada mikrokontroler AT89S8252 terdapat tambahan Timer 2. Timer yang lain adalah
Timer 0 dan Timer 1 yang terdapat pada standard MCS-51 dimana memilki 2 timer
yang dapat dikonfigurasikan beroperasi sebagai timer atau counter. Saat berfungsi
sebagai timer, isi register ditambah satu untuk tiap siklus mesin, sedangkan untuk
fungsi counter isi register akan bertambah 1 setiap ada transisi sinyal pada pin input
eksternal. Pada pemanfaatan sebagai counter, sinyal input yang dimasukan dapat
berupa low level atau falling edge trigger. Counter akan mencacah setiap masukan
terendah untuk tiap sampling. Inisialisasi harga awal ini berupa nilai preset negatif
counter yang diatur sebelum counter dijalankan.
Hal yang perlu diperhatikan adalah bahwa Timer/Counter dapat digunakan
sebagai generator boud rate untuk serial port. Pada standard MCS-51 biasanya
digunakan Timer 1 sebagai penghasil baud rate. Nah pada mikrokontroller Atmel
AT89S8252 ini selain dapat menggunakan Timer 1 sebagai penghasil baud rate (untuk
menjaga kompatibilitas dengan MCS-51) juga dapat menggunakan Timer 2 sebagai
penghasil baud rate untuk serial port.
Timer 2 ini merupakan Timer/Counter yang berukuran 16 bit yang dapat
beroperasi sebagai Timer (dengan detak dari sistem detak mikrokontroler) atau dapat
beroperasi sebagai penghitung kejadian (event counter) dengan detak dari luar. Untuk
mengatur fungsi ini dilakukan dengan mengatur bit C/T2 pada SFR T2CON. Terlihat
bahwa jika bit ini tinggi maka akan terpilih fungsi counter (C), tetapi jika bit ini
rendah maka akan terpilih fungsi Timer 2 (T2).
Timer 2 ini memiliki 3 mode operasi yaitu capture, auto reload (up dan down
counting) dan baud rate generator. Untuk memilih mode ini dilakukan dengan
2.6 Transistor sebagai Saklar
Di dalam pemakaiannya transistor dipakai sebagai komponen saklar (switching)
dengan memanfaatkan daerah penjenuhan (saturasi) dan daerah penyumbatan (cut off)
yang ada pada karakteristik transistor.
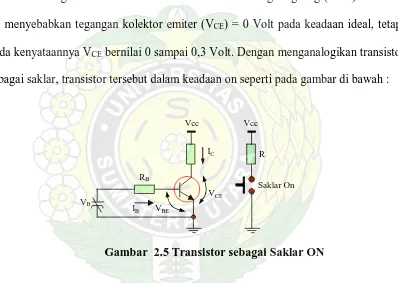
Pada daerah penjenuhan nilai resistansi persambungan kolektor emiter secara
ideal sama dengan nol atau kolektor dan emiter terhubung langsung (short). Keadaan
ini menyebabkan tegangan kolektor emiter (VCE) = 0 Volt pada keadaan ideal, tetapi
pada kenyataannya VCE bernilai 0 sampai 0,3 Volt. Dengan menganalogikan transistor
sebagai saklar, transistor tersebut dalam keadaan on seperti pada gambar di bawah :
Gambar 2.5 Transistor sebagai Saklar ON
Saturasi pada transistor terjadi apabila arus pada kolektor menjadi maksimum
dan untuk mencari besar arus basis agar transistor saturi adalah :
Hubungan antara tegangan basis (VB) dan arus basis (IB) adalah :
saturasi, dengan Ic mencapai maksimum.
Dengan menganalogikan transistor sebagai saklar, transistor tersebut dalam
keadaan off di tunjukkan pada gambar di bawah ini :
Gambar 2.6 Transistor sebagai Saklar OFF
Keadaan penyumbatan terjadi apabila besar tegangan habis (VB) sama dengan
Hal ini menyebabkan VCE sama dengan Vcc dapat dibuktikan dengan rumus :
Vcc = Vc + VCE ………..………(2.11)
VCE = Vcc – (Ic . Rc) ..………(2.12)
VCE = Vcc ..………(2.13)
2.7 Aplikasi IC HT9170 sebagai DTMF Decoder
IC HT9170 merupakan IC penerima DTMF yang didalamnya terdapat dua fungsi
sekaligus, yaitu sebagai filter band pass dan penerjemah data digital (digital decoder).
Pada bagian filternya menggunakan tehnik switch dari kapasitor untuk kelompok filter
high pass dan filter low pass. Pada bagian dekodernya menggunakan tehnik
penghitungan digital untuk mendeteksi dan menerjemahkan 16 pasangan nada DTMF
menjadi 4-bit kode biner. IC HT9170 ditunjukkan pada gambar berikut ini :
Gambar 2.7 IC HT9170
IC HT9170 ini akan menterjemahkan sinyal yang diberikan pada inputnya,
2.8 Motor Langkah (Stepper)
Motor langkah (stepper) banyak digunakan dalam berbagai aplikasi, dipergunakan
apabila dikehendaki jumlah putaran yang tepat atau di perlukan sebagian dari putaran
motor. Suatu contoh dapat di jumpai pada disk drive, untuk proses pembacaan
dan/atau penulisan data ke/dari cakram(disk), head baca-tulis ditempatkan pada
tempat yang tepat di atas jalur atau track pada cakram, untuk head tersebut di
hubungkan dengan sebuah motor langkah.
Aplikasi penggunaan motor langkah dapat juga di jumpai dalam bidang
industri atau untuk jenis motor langkah kecil dapat di gunakan dalam perancangan
suatu alat mekatronik atau robot. Motor langkah berukuran besar digunakan,
misalnya, dalam proses pengeboran logam yang menghendaki ketepatan posisi
pengeboran, dalam hal ini di lakukan oleh sebuah robot yang memerlukan ketepatan
Pada gambar di bawah ditunjukkan dasar susunan sebuah motor langkah
(stepper).
Gambar 2.8 Diagram Motor Langkah (Stepper)
Magnet permanen N-S berputar kearah medan magnet yang aktif. Apabila
kumparan stator dialiri arus sedemikian rupa, maka akan timbul medan magnet dan
rotor akan berputar mengikuti medan magnet tersebut.setiap pengalihan arus ke
kumparan berikutnya menyebabkan medan magnet berputar berputar menurut suatu
sudut tertentu, biasanya informasi besar sudut putar tertulis pada badan motor langkah
yang bersangkutan. Jumlah keseluruhan pengalihan menentukan sudut perputaran
motor. Jika pengalihan arus di tentukan, maka rotor akan berhenti pada posisi
terakhir. Jika kecepatan pengalihan tidak terlalu tinggi, maka slip akan dapat
dihindari. Sehingga tidak di perlukan umpan balik (feedback) pada pengendalian
motor langkah.
A
D B
A C
B U
2.9 Data/Pulsa pada Motor Langkah (Stepper)
Motor langkah yang akan di gunakan memiliki 4 fase (pole atau kutub), pengiriman
pulsa dari mikrokontroler ke rangkaian motor langkah dilakukan secara bergantian,
masing-masing 4 data (sesuai dengan jumlah phase-nya), sebagian di tunjukkan pada
gambar di bawah ini.
Gambar 2.9 Pemberian data/pulsa pada motor stepper
Pada saat yang sama ,untuk tiap motor langkah, tidak boleh ada 2 (dua)
masukan atau lebih yang mengandung pulsa sama dengan 1 (high), atau dengan kata
lain, pada suatu saat hanya sebuah masukan yang bernilai 1 (satu) sedangkan lainnya
bernilai 0 (nol). C
BAB 3
PERANCANGAN ALAT
3.1Diagram Blok Rangkaian
Secara garis besar, perancangan pintu gerbang dengan menggunakan password HP ini
terdiri dari power supplay, mikrokontroler AT89S8252, driver motor stepper, motor
stepper, display seven segmen, penguat, DTMF dekoder, dan saklar batas dan tombol
manual. Diagram blok dari pintu gerbang dengan menggunakan password HP
ditunjukkan pada gambar berikut :
Power supplay berfungsi sebagai sumber tegangan dari seluruh system agar
system dapat bekerja.
AT89S8252 merupakan pusat kendali dari seluruh rangkaian. Dimana
mikrokontroler akan mengambil data yang dikirimkan oleh DTMF dekoder
kemudian membandingkannya dengan nilai yang benardan juga mengecek
sinyal yang dikirimkan oleh saklar batas, kemudian mengendalikan motor
stepper.
Driver motor stepper berfungsi untuk mengendalikan perputaran dari motor
stepper, sehingga dengan demikian perputaran dari motor stepper yang
berfungsi untuk membuka/menutup pintu gerbang agar dapat dikendalikan
oleh mikrokontroler.
Motor stepper berfungsi untuk mengendalikan proses membuka/menutup pintu
gerbang.
Saklar batas berfungsi untuk mengetahui apakah pintu gerbang telah terbuka
lebar atau telah tertutup rapat.
Tombol manual berfungsi untuk membuka/menutup pintu gerbang secara
manual.
Penguat berfungsi untuk menguatkan sinyal yang dikirimkan oleh HP.
DTMF dekoder berfungsi untuk menterjemahkan sinyal DTMF yang
dikirimkan oleh HP menjadi 4 bit data biner agar dapat dikenali oleh
mikrokontroler.
Display seven segmen berfungsi untuk menampilkan angka hasil terjemahan
Vreg
3.2 Perancangan Power Supplay (PSA)
Rangkaian PSA yang dibuat terdiri dari tiga keluaran, yaitu (+) 5 volt, (+) 12 volt dan
(–) 12 volt. Keluaran (+) 5 volt digunakan untuk menghidupkan seluruh rangkaian,
keluaran (+) 12 volt digunakan untuk menghidupkan relay dan keluaran (-) 12 volt
untuk mensupplay tegangan negatip Op-Amp. Rangkaian tampak seperti gambar di
bawah ini:
Gambar 3.2 Rangkaian Power Supplay (PSA)
Trafo merupakan trafo stepdown yang berfungsi untuk menurunkan tegangan
dari 220 volt AC menjadi 12 volt AC. Kemudian 15 volt AC akan disearahkan dengan
menggunakan dua buah dioda, selanjutnya 15 volt DC akan diratakan oleh kapasitor
2200 µF. Regulator tegangan 5 volt (LM7805CT) digunakan agar keluaran yang
dihasilkan tetap 5 volt walaupun terjadi perubahan pada tegangan masukannya. LED
hanya sebagai indikator apabila PSA dinyalakan. Transistor PNP TIP 32 disini
berfungsi untuk mensupplay arus apabila terjadi kekurangan arus pada rangkaian,
sehingga regulator tegangan (LM7805CT) tidak akan panas ketika rangkaian butuh
tegangan LM7812. Dan tegangan (-) 12 volt dihasilkan oleh regulator tegangan
LM7912.
3.3Perancangan Rangkain µC AT89S8252
Rangkaian µC AT89S8252 pada penelitian ini berfungsi sebagai pusat kendali dari
seluruh sistem. Rangkaian mikrokontroler AT89S8252 ini akan menunggu pengiriman
sinyal dari kedua saklar batas ketika sedang membuka/menutup pintu gerbang. Sinyal
yang ditunggu adalah sinyal low. Jadi dalam keadaan normal, maka masing-masing
saklar akan terus-menerus mengirimkan sinyal high. Ketika terjadi pengiriman sinyal
low dari salah satu saklar, maka rangkaian mikrokontroler AT89S8252 ini akan
melihat saklar mana yang mengirimkan sinyal low tersebut kemudian rangkaian
mikrokontroler AT89S8252 memerintahkan motor untuk berhenti berputar. Rangkaian
5 V
Gambar 3.3 Rangkaian mikrokontroler AT89S8252
Selain mengecek sinyal yang dikirimkan oleh saklar batas, mikrokontroler ini
juga melihat data yang dikirimkan oleh DTMF dekoder dan membandingkannya
dengan data yang benar.
Komponen utama dari rangkaian ini adalah IC mikrokontroler AT89S8252.
Kapasitor 10 µF dan resistor K ohm bekerja sebagai “ power on reset” bagi
mikrokontroler AT89CS8252 dan kristal 12 MHZ bekerja sebagai penentu nilai clock
kepada mikrokontroler, sementar kapasitor 30 µF bekerja sebagai resenator terhadap
kristal.
Pin 17 yang merupakan P3.7 dihubungkan dengan transistor dan sebuah LED.
AT89S8252 sudah bekerja atau belum. Dengan memberikan program sederhana pada
mikrokontroller tersebut, dapat diketahui apakah rangkaian minimum tersebut sudah
bekerja dengan baik atau tidak. Jika LED yang terhubug ke Pin 17 sudah bekerja
sesuai dengan perintah yang diberikan, maka rangkaian minimum tersebut telah siap
digunakan. Namun setelah seluruh rangkaian disatukan, LED yang terhubung ke in 17
ini tidak digunakan lagi.
3.4Perancangan Rangkaian Driver Motor Stepper
Untuk mengendalikan perputaran motor stepper dibutuhkan sebuah driver. Driver ini
berfungsi untuk memutar motor stepper searah dengan jarum jam atau berlawanan
arah dengan jarum jam. Rangkaian driver motor stepper ini terdiri dari empat
masukan dan empat keluaran, dimana masing-masing masukan dihubungkan dengan
mikrokontroler AT89S8252 dan keluarannya dihubungkan ke motor stepper.
Rangkaian ini akan bekerja memutar motor stepper jika diberi sinyal high (1) secara
bergantian pada ke-4 masukannya. Rangkaiannya seperti gambar di bawah :
Gambar 3.4 Rangkaian Driver Motor Stepper
Rangkaian ini terdiri dari 4 buah transistor NPN TIP 122. Masing-masing
transistor dihubungkan ke P0.0, P0.1, P0.2 dan P0.3 pada mikrokontroler
AT89S8252. Basis dari masing-masing transistor diberi tahanan 10 Kohm untuk
membatasi arus yang masuk ke transistor. Kolektor dihubungkan dengan kumparan
yang terdapat pada motor stepper, kemudian kumparan dihubungkan dengan sumber
tegangan 12 volt.dan emitor dihubungkan ke ground.
Jika P0.0 diberi logika high (1), yang berarti basis pada transistor TIP 122
mendapat tegangan 5 volt, maka transistor akan aktip. Hal ini akan menyebabkan
terhubungnya kolektor dengan emitor, sehingga kolektor mendapatkan tegangan 0 volt
dari ground. Hal ini menyebabkan arus akan mengalir dari sumber tegangan 12 volt ke
kumparan, sehingga kumparan akan menghasilkan medan magnet. Medan magnet ini
akan menarik logam yang ada pada motor, sehingga motor mengarah pada kumparan
yang memiliki medan magnet tesebut.
Jika kemudian P0.0 di beri logika low (0), yang berarti transistor tidak aktif
dan tidak ada arus yang mengair pada kumparan, sehingga tidak ada medan magnet
pada kumparan. Dan disisi lain P0.1 diberi logika high (1), sehingga kumparan yang
terhubung ke P0.1 akan menghasilkan medan magnet. Maka motor akan beralih
kearah kumparan yang terhubung ke P0.1 tersebut. Seterusnya jika logika high
diberikan secara bergantian pada input dari driver motor stepper, maka motor stepper
akan berputar sesuai dengan arah logika high (1) yang diberikan pada inputnya.
Untuk memutar dengan arah yang berlawanan dengan arah yang sebelumnya,
maka logika high (1) pada input driver motor stepper harus diberikan secara
3.5Perancangan Rangkaian Tombol Manual
Rangkaian tombol ini berfungsi untuk membuka atau menutup pintu gerbang secara
manual. Rangkaian tombol manual ini hanya terdiri dari resistor dan tombol.
Rangkaian tombol ditunjukkan pada gambar 3.8 berikut ini :
Gambar 3.5 Rangkaian Tombol
Jika tidak ada penekanan pada tombol, maka hubungan antara kaki
mikrokontroler ke ground akan terputus ,sehingga rangkaian ini akan mengirimkan
logika high (1) ke mikrokontroler AT89S8252. Namun jika ada penekanan pada
tombol, maka kaki mikrokontroler akan terhubung dengan ground, sehingga rangkaian
ini akan mengirimkan logika low (0) ke mikrokontroler AT89S8252. Perubahan dari
logika high menjadi logika low inilah yang merupakan indikasi bahwa tombol ditekan.
3.6Perancangan Rangkaian Saklar Batas
Ketika mikrokontroler memerintahkan motor untuk membuka pintu gerbang,
mikrokontroler tidak mengetahui apakah pintu gerbang sudah terbuka lebar atau
belum. Hal yang sama juga terjadi ketika mikrokontroler memerintahkan motor untuk
menutup pintu gerbang, mikrokontroler tidak mengetahui apakah pintu gerbang sudah
4K7
AT89S8252
VCC 5V
tertutup rapat atau belum. Karena itu dibutuhkan sebuah saklar batas yang dapat
mengetahui kedua keadaan tersebut.
Dalam hal ini digunakan sebuah saklar batas untuk buka pintu gerbang, yang
berfungsi untuk mengetahui apakah pintu gerbang sudah terbuka lebar atau belum,
dan sebuah saklar batas untuk tutup pintu gerbang yang berfungsi untuk mengetahui
apakah pintu gerbang sudah tertutup rapat atau belum. Rangkaian saklar batas untuk
buka pintu gerbang hanya terdiri dari saklar yang dihubungkan ke ground dan ke
mikrokontroler AT89S8252. Rangkaiannya seperti gambar dibawah ini,
P1.0 (AT89S8252)
Gambar 3.6 Rangkaian Saklar batas untuk Buka Pintu
Ketika saklar batas dalam keadaan terbuka, kondisi P1.0 adalah high. Namun
jika pintu gerbang menyentuh saklar, maka P1.0 akan terhubung ke ground, yang
menyebabkan kondisi P1.0 akan berubah dari high (1), menjadi low (0). Perubahan
kondisi pada P1.0 inilah yang dikenali oleh mikrokontroler sebagai tanda bahwa pintu
gerbang telah terbuka lebar, maka mikrokontroler akan memerintahkan motor stepper
untuk berhenti berputar, sehingga pintu gerbang tidak terbuka lebih lebar lagi.
Saklar batas untuk tutup pintu gerbang juga mempunyai rangkaian dan cara
kerja yang sama dengan rangkaian saklar batas untuk buka pintu, perbedaannya hanya
3.7Perancangan Rangkaian Penguat
Rangkaian penguat ini berfungsi untuk menguatkan sinyal yang diterima oleh HP
(kabel speaker pada hansfree). Karena sinyal yang diterima oleh HP sangat kecil,
sehingga dibutuhkan penguat. Rangkaian penguat dapat dilihat pada gambar berikut
ini :
Gambar 3.7 Rangkaian Penguat
Komponen utama dari rangkaian ini adalah Op Amp 741, yang merupakan IC
penguat. Pada rangkaian ini terjadi penguatan sebesar :
220.000
3.8Perancangan Rangkaian DTMF Dekoder
Rangkaian ini berfungsi untuk mengubah nada tone yang diterima menjadi 4 bit data
Vc
Gambar 3.8 Rangkaian DTMF Dekoder
Komponen utama dari rangkaian ini adalah IC HT9170. IC ini merupakan IC
DTMF decoder. IC ini akan merubah tone yang ada pada inputnya menjadi 4 bit data
biner. Jika tone yang diterimanya tone 1, maka output dari rangkaian ini adalah 0001,
tone yang diterimanya tone 2, maka output dari rangkaian ini adalah 0010, demikian
seterusnya.
Input rangkaian akan dihubungkan dengan penguat sehingga sinyal (tone)
yang berasal dari HP akan diinputkan ke pin 2 dari IC. Output dari rangkaian akan
dihubungkan ke mikrokontroler sehingga mikrokontroler dapat mengenali data yang
dikirimkan oleh rangkaian untuk kemudian diolah oleh mikrokontroler untuk
C945
4.7k
P0.0 AT89S8252
5 Volt
Buzzer
3.9 Perancangan Rangkaian Buzzer
Rangkaian buzzer ini berfungsi untuk memberitahukan kepada pemilik, ketika terjadi
kesalahan memasukkan password. Rangkaiannya seperti gambar di bawah ini:
Gambar 3.9 Rangkaian Buzzer.
Pada alat ini, alarm yang digunakan adalah buzzer 5 volt. Buzzer ini akan
berbunyi jika positipnya dihubungkan ke sumber tegangan positip dan negatipnya
negatipnya dihubungkan ke ground.
Pada rangkaian di atas transistor berfungsi sebagai saklar elektronik yang
dapat menghidupkan dan mematikan buzzer. Dari gambar dapat dilihat bahwa negatif
buzzer dihubungkan ke kolektor dari transistor NPN (2SC945), ini berarti jika
transistor dalam keadaan aktif maka kolektor akan terhubung ke emitor dimana emitor
langsung terhubung ke ground yang menyebabkan tegangan di kolektor menjadi 0
volt, keadaan ini akan mengakibatkan buzzer berbunyi. Sebaliknya jika transistor
tidak aktif, maka kolektor tidak terhubung ke emitor, sehingga tegangan pada kolektor
Transistor yang digunakan dalam rangkaian pada gambar 3.9 adalah transistor
jenis NPN, transistor jenis ini akan aktif apabila tegangan pada basis lebih besar dari
0,7 volt. Resistor 4,7 K pada basis berguna untuk membatasi arus yang masuk
pada basis agar transistor tidak rusak.
3.10 FLOWCHART
Tidak
Ya
Tidak
Ya
Tidak
Ya Start
Tone #
Masukkan Password
Password Benar ?
Buka Gerbang
Tunda Sejenak
Tutup Gerbang Tombol
Program diawali dengan start yang berarti rangkaian dihidupkan, kemudian
program akan menunggu penekanan pada tombol, jika tidak ada penekanan pada
tombol, maka program akan menunggu sinyal DTMF yang datang. Jika tidak ada
maka, program akan kembali menunggu penekanan tombol. Jika terjadi penekanan
tombol, maka program akan memerintahkan motor untuk berputar membuka pintu
gerbang, kemudian program akan menunggu sejenak, sampai kendaraan masuk ke
dalam gerbang. Selanjutnya program akan memerintahkan motor untuk berputar
menutup gerbang, kemudian kembali ke rutin awal untuk menunggu penekanan
tombol dan sinyal DTMF berikutnya.
Jika ada sinyal DTMF yang datang, yang berarti ada orang yang menghubungi
Handphone yang ada pada alat penerima, maka program akan mengambil nilai
password yang dimasukkan. Jika nilainya salah, maka program akan kembali ke rutin
awal untuk menunggu penekanan tombol dan menunggu sinyal DTMF berikutnya.
Jika password yang diberikan benar, maka progran akan memerintahkan motor
untuk berputar membuka pintu gerbang, kemudian program akan menunggu sejenak,
sampai kendaraan masuk melewati gerbang. Selanjutnya program akan
memerintahkan motor untuk berputar menutup gerbang, kemudian kembali ke rutin
BAB IV
PENGUJIAN ALAT DAN PROGRAM
4.1 Pengujian Rangkaian Mikrokontroller AT89S8252
Untuk mengetahui rangkaian mikrokontroller AT89S8252 telah bekerja dengan baik,
maka dilakukan pengujian.Pengujian bagian ini dilakukan dengan memberikan
program sederhana pada mikrokontroller AT89S8252. Programnya adalah sebagai
berikut:
Loop:
Setb P3.7
Acall tunda
Clr P3.7
Acall tunda
Sjmp Loop
Tunda:
Mov r7,#255
Tnd: Mov r6,#255
Djnz r6,$
Djnz r7,tnd
Ret
Program tersebut bertujuan untuk menghidupkan LED yang terhubung ke P3.7
secara terus menerus. Perintah Setb P3.7 akan menjadikan P3.7 berlogika high yang
menyebabkan transistor aktif, sehingga LED menyala. Acall tunda akan menyebabkan
LED ini hidup selama beberapa saat. Perintah Clr P3.7 akan menjadikan P3.7
berlogika low yang menyebabkan transistor tidak aktif sehingga LED akan mati.
Perintah Acall tunda akan menyebabkan LED ini mati selama beberapa saat. Perintah
Sjmp Loop akan menjadikan program tersebut berulang, sehingga akan tampak LED
tersebut tampak berkedip.
4.2 Pengujian Rangkaian Driver motor stepper
Pengujian pada rangkaian driver motor stepper ini dilakukan dengan menghubungkan
input rangkaian driver motor stepper ini dengan rangakaian mikrokontroler
AT89S8252 dan menghubungkan output dari rangkaian driver motor stepper ini
dengan motor stepper, kemudian memberikan program sebagai berikut:
Mov a,#11h
Buka:
mov p0,a
acall tunda
rr a
sjmp buka
tunda:
mov r7,#30
tnd:
djnz r6,$
djnz r7,tnd
ret
Program di atas akan memberikan logika high secara bergantian pada input
dari driver motor stepper, dimana input dari jembatan masing-masing dihubungkan ke
P0.0,P0.1, P0.2 dan P0.3. Dengan program di atas maka motor akan bergerak searah
dengan arah putaran jarum jam (membuka pintu). Untuk memutar dengan arah
sebaliknya (menutup pintu), maka diberikan program sebagai berikut :
Mov a,#11h
tutup:
mov p0,a
acall tunda
rl a
sjmp tutup
tunda:
mov r7,#30
tnd:
mov r6,#255
djnz r6,$
djnz r7,tnd
ret
Dengan program tersebut, maka motor akan berputar berlawanan arah dengan
putar dari motor. Semakin besar nilai yang diberikan pada tunda, maka perputaran
motor akan semakin lambat, dan sebaliknya.
4.3Pengujian Rangkaian Penguat
Pengujian pada rangkaian ini dapat dilakukan dengan cara mengukur tegangan pada
input dari Op-Amp dan tegangan pada outputnya. Dari hasil pengukuran didapat nilai
tegangan sebagai berikut :
Input Output
3,9 mV 36,2 mV
Dari data yang ada, didapatkan penguatan yang dihasilkan oleh rangkaian sebesar
9,282 kali.
4.4Pengujian Rangkaian DTMF Dekoder.
Pengujian pada rangkaian ini dapat dilakukan dengan mengubungkan input dari
rangkaian ini ke rangkaian penguat, kemudian menghubungkannya dengan kabel
speaker pada HP. Selanjutnya tombol pada HP ditekan dan dilihat outpunya. Dari
hasil pengujian didapatkan data sebagai berikut :
Tombol LED1 LED2 LED3 LED4
1 ON OFF OFF OFF
3 ON ON OFF OFF
4 OFF OFF ON OFF
5 ON OFF ON OFF
6 OFF ON ON OFF
7 ON ON ON OFF
8 OFF OFF OFF ON
9 ON OFF OFF ON
0 OFF ON OFF ON
* ON ON OFF ON
# OFF OFF ON ON
4.5Pengujian Rangkaian Buzzer
Pengujian pada rangkaian buzzer ini dapat dilakukan dengan memberikan tegangan 5
volt dan 0 volt pada basis transistor C945. Transistor C945 merupakan transistor jenis
NPN, transistor jenis ini akan aktip jika pada basis diberi tegangan lebih besar dari 0,7
volt dan tidak aktif jika pada basis diberi tegangan lebih kecil dari 0,7 volt. Aktipnya
transistor akan membunyikan buzzer.
Selanjutnya buzzer dihubungkan dengan mikrokontroler dan mikrokontroler
diberi program sederhana untuk megaktipkan buzzer. Program yang diisikan ke
mikrokontroler untuk mengaktipkan buzzer adalah :
Setb P1.0
Perintah tersebut akan memberikan logika high (1) atau tegangan 5 volt. pada P1.0,
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
1. Pada perancangan alat ini digunakan handphone sebagai pengirim sinyal, yaitu
sinyal DTMF.
2. Mikrokontroler AT89S8252 memiliki fasilitas EEPROM yang bermanfaat untuk
penggunaan password secara berulang dan password yang baru tidak akan
berubah meskipun catu daya hilang.
3. Pada alat ini selain digunakan ponsel juga dilengkapi password sebagai
pengaman untuk menghindari hal-hal yang tidak diinginkan.
5.2 Saran
1. Pada alat ini selain dapat digunakan untuk membuka dan menutup pintu gerbang
juga dapat digunakan pada apllikasi lainya, seperti mengendalikan alat lainnya
seperti mematikan dan menghidupkan lampu.
2. Sebaiknya alat dikembangkan lagi, karena masih menggunakan ponsel sebagai
alat pengendalinya, dapat digunakan remote multi yang dapat mengendalikan dan
DAFTAR PUSTAKA
Agfianto, Belajar Mikrokontroler AT89C51/52/55 Teori dan Aplikasi, Edisi Kedua, Penerbit: Gava Media, Yogyakarta, 2004
Agfianto. 2002. Teknik Antarmuka Komputer: Konsep dan Aplikasi. Edisi Pertama. Yogyakarta : Graha Ilmu
Andi, Panduan Praktis Teknik Antarmuka dan Pemograman Mikrokontroler AT89C51, Penerbit P.T. Elex Media Komputindo, Jakarta, 2003
Clayton George, Winder Steve, Opertional Amplifiers, Edisi Kelima, Penerbit Erlangga, Jakarta, 2004
Malvino, Albert paul. 2003. Prinsip-prinsip Elektronika. Jilid 1 & 2. Edisi Pertama, Penerbit: Salemba Teknika, Jakarta, 2003