TACOMETER (KECEPATA PUTARAN) BERBASIS AT MEGA 328P
TUGAS AKHIR
DEDI SUPRIANTO TAMBA 152408008
PROGRAM STUDI D-III FISIKA DEPARTEMEN FISIKA
TACOMETER (KECEPATA PUTARAN) BERBASIS AT MEGA 328P
TUGAS AKHIR
DIAJUKAN UNTUK MELENGKAPI TUGAS DAN MEMENUHI SYARAT MEMPEROLEH GELAR AHLI MADYA
DEDI SUPRIANTO TAMBA 152408008
PROGRAM STUDI D-III FISIKA
PERNYATAAN ORISINALITAS
TACOMETER ( KECEPATANPUTARAN ) BERBASIS ATMEGA 328 P
LAPORAN TUGAS AKHIR
Saya menyatakan bahwa laporan tugas akhir ini adalah hasil karya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya
Medan,24 Juli Mei 2018
Dedi Suprianto 152408044
Msi
NIP.196006311986011002 NIP.195609181985031002
TACOMETER ( KECEPATANPUTARAN ) BERBASIS ATMEGA 328 P
ABSTRAK
Telah dirancang sebuah alat penghitung kecepatan putaran, alat ini terdiri dari beberapa komponen yaitu Atmega 328 P sebagai mikrokontrilernya, sensor infrared optocoupler menghitung kecepatan putaran pada dasarnya optocoupler terdiri dari dari 2 bagian yaitu trasmisster yang berfungsi sebagai pengirim cahaya dan receiver yang berfungsi penghitung kecepatan putaran, liquid crystal Display 16x2 sebagai komponen yang menampilkan tulisan,alat ini diharapkan dapat membantu manusia menghitung kecepatan putaran dan alat ini telah bekerja dengan baik
Kata kunci : ATMega 328 P, Sensor Infrared Optocoupler,, LCD
TACOMETER ( KECEPATANPUTARAN ) BERBASI ATMEGA 328 P
ABSTRAK
Has been designed a roration speed counter,this tool consist of several components that atmega 328 p as its microcontroler,infrared optocoupler sensor calculates the sped of roration basically optocoupler consists of 2 patrs of the trassmitter that serves as the sander of light and receiver that serves asa a counter sped of roration liquid crystal display component display this tool is expected to help everyone to calculate the speed of roration this tool also has worked well
Keywords : ATMega 328, Sensor Opcoupler,, LCD
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Kuasa, dengan Limpahan berkat-nya penyusun Tugas Akhir ini dapat diselesaikan dalam waktu yang ditetapkan. Ucapan terima kasih penulis sampaikan kepada berbagai pihak yang telah banyak membantu penulis dalam penyelesaikan Tugas Akhir ini yaitu kepada:
1. Bapak Dr. Kerista Sebayang, MS selaku Dekan Fakultas Matematikadan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
2. Bapak Drs.Takdir Tambah,M.Eng.Sc. selaku Ketua JurusanD3 Fisika Universitas Sumatera Utara.
3. Tuaraja simbolon S SI M SI selaku dosen pembimbing yang telah
membimbing dan mengarahkan kepada penulis dalam menyelesaikanlaporan Proyek ini.
4. Dosen-dosen di Departemen Fisika yang telah memberikan ilmu selama dalam perkuliahan.
5. Pegawai- pegawai di Departemen Fisika yang telah memberikan petunjuk dan arahan selama dalamperkuliahan.
6. Bang Frangsius selaku orang yang membantu penulis dalammenyelesaikan proyek akhir ini.
7. Teman- teman dan para sahabat yang telah menjadi keluarga kedua penulis selama ini.
Penulis menyadari sepenuhnya bahwa dalam pembuatan laporan proyek ini masih jauh dari kesempurnaan, untuk itu kritik dan saran yang bersifat membangun sangat penulis harapkan dari para pembaca.
Medan, 20 juli 2018
Dedi suprianto Tamba 152408008
DAFTAR ISI
PENGESAHAN LAPORAN TUGAS AKHIR ... i
ABSTRAK... ii
PENGHARGAAN ... iii
DAFTAR ISI ... v
DAFTAR TABEL ... vi
DAFTAR GAMBAR ... viii
DAFTAR LAMPIRAN ... ix
BAB I PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Rumusan Masalah... 2
1.3 Batasan Masalah ... 2
1.4 Tujuan Penulisan ... 2
1.5 Sistematika Penulisan ... 3
BAB II DASAR TEORI 2.1 Sensor ... 4
2.1.1 Sensor Infrared optocoupler ... 6
2.2 Mikrokontroler... 9
2.1.1 Atmega 328 p... 10
2.3 LCD ( liquid crystal display ... 14
2.3.1 Cara Kerja LCD ... 16
2.4 Potensiometer ... 18
2.4.1 Jenis Jenis Potensiometer ... 20
2.4.1 Prinsip Kerja Potensiometer ... 21
2.5 Dinamo ... 22
2.5.1 Prinsip Kerja Dinamo ... 23
2.5.2 Funfsi Dinamo ... 24
BAB III DASAR TEORI 3.1 Umum ... 26
3.2 Tujuan Perancangan ... 26
3.3 Digram Block ... 27
3.4 Flowchat Sistem ... ....28
3.5 Rangkaian LCD dan Mikrokontroler ... 28
3.6 Rangkaian Sensor Dan Mikrokontroler ... 28
3.7 Rangkaian Keseluruhan Sistem...29
BAB IV PEMBAHASAN 4.1 Pengujian Mikrokontroler... 30
4.2 Pengujian LCD ... 30
4.3 Pengujian Sensor ... 31
4.4 Pengujian Rangkaian Keseluhan ... 33
4.5 Tampilan Alat ... 33
BAB V PENUTUP 5.1 Kesimpulan. ... 34
5.2 Saran ... 34
DAFTAR PUSTAKA ... 35
DAFTAR GAMBAR
Gambar 2.1 SistemMinimum ... 9
Gambar 2.2 RangkaianSistemMinimum ... 10
Gambar 2.3 Pin MapATmegap ... 12
Gambar 2.4 Sensor Optocoupler ... 13
Gambar 2.5 LCD ( Liquid CrystalDisplay ... 15
Gambar 2.6 Penampang KomponenPenyusun LCD ... 16
Gambar 2.7 Skematik LCD ... 18
Gambar 2.8 Dinamo ... 23
Gambar 3.1 Block Diagram ... 27
Gambar 3.2 FlowchatSistem ... 28
Gambar 3.3 Rangkaian LCD Dan Atmega328P ... 28
Gambar 3.4 Rangkaian Sensor Dan Atmega328 P ... 29
Gambar 3.5 RangkaianKeseluruhan Sistem ... 30
Gambar 4.1 Rangkain pengujian Mikrokontroler Atmega328P ... 30
Gambar 4.2 Hasil Pengujian LCDDisplay ... 31
Gambar 4.3 Hasil Monotoring Sensor pada cortCOM3 ... 32
Gambar 4.4TampilanAlat ... 33
DAFTAR TABEL
Tabel 4.1 HasilPembacaanSensor ... 32 Tabel 4.2 Hasil pengujianSeluruhSensor ... 33
viii
BAB I PENDAHULUAN
LATAR BELAKANG
Ilmu pengetahuan dan teknologi terutama dalam bidang elektronika dan komputerisasi berkembang sangat pesat pada masa ini Penggunaan teknologi komputer dalam mengendalikan sesuatu agar dapat berjalan otomatis sudah banyak dilakukan, ditambah lagi dengan adanya penemuan komponen-komponen elektronika yang mempunyai bentuk dan kemampuan yang dapat memberikan banyak pilihan serta dengan perkembangan perangkat lunak sekarang ini yang semakin pesat juga sehingga telah banyak menghasilkan rancang bangun suatu alat yang aplikatif dalam penggunaannya. Sebagai contoh pengukuran besaran memanfaatkan berbagai macam sensor yang dihubungkan dengan mikrokontroler sebagai pengolah data besaran tersebut dan kemudian data pengukuran ditampilkan ke dalam monitor komputer saat ini mulai banyak dikembangkan.
Pengukuran besaran putaran per menit atau sering disebut dengan rotation per minute (RPM) biasanya menggunakan alat ukur RPM analog yang dapat dibeli di pasaran yakni Tachometer, fungsi utama sebuah Tachometer umumnya berguna untuk memantau kinerja mesin mobil atau motor.Secara sederhana, tachometer merupakan instrumen yang digunakan untuk mengukur kecepatan perangkat berputar.Instrumen ini bekerja dengan menghitung banyaknya rotation per minute (RPM) atau putaran per menit.Penggunaan paling umum tachometer adalah untuk menentukan kecepatan dari poros berputar yang digerakkan oleh sebuah motor penggerak.
Tachometer yang umum dijual di pasaran saat ini adalah Tachometer analog yang terdiri dari jarum yang menunjukkan pembacaan disertai indikator apakah putaran motor penggerak masih dalam taraf aman atau sudah mulai membahayakan. Selain tachometer analog, terdapat pula tachometer digital yang sudah mulai menggantikan jenis analog.Pada tachometer digital, hasil pengukuran langsung disajikan dalam bentuk angka sehingga mempermudah pembacaan.
Kelemahan dari tachometer analog maupun digital adalah sekedar dapat melakukan pembacaan saja tanpa dapat melakukan pengontrolandan
pencatatan data secara otomatis, dengan pertimbangan tersebut untuk sebuah pengukuran putaran motor per menit atau RPM dibutuhkan peralatan ukur yang lebih efektif dan efisien dalam pengukuran serta dapat dilakukan pengontrolan terhadap kecepatan putaran motor DC secara terintegrasi dalam satu sistem, dalam hal ini komputer dijadikan sebagai pengolah serta penampil data untuk kemudian dilakukan pengendalian terhadap motorDC.
Aplikasi pemrograman komputer dapat dimanfaatkan sebagai visualisasi untuk menampilkan data RPM, sehingga mampu memberikan kemudahan kepada pemakai serta memiliki daya guna yang tinggi dalam mengikuti perkembangan teknologi komputer saat ini.
PERUMUSANMASALAH
Berdasarkan uraian diatas, penulis tertarik untuk mengangkat permasalahan tersebut ke dalam bentuk skripsi sebagai Tugas Akhir dengan judul “Rancang Bangun Alat Ukur Kecepatan Putaran(Tacometer)”.
BATASAN MASALAH
Untuk meruncingkan persoalan, penulis membatasi perancangan alat ini sebagai berikut :
1. Sensor Yang digunakan adalah Sensor infrared dengan roda khusus untuk menghitung kecepatanputaran.
2. Pengetesan unjuk kerja Sistem dilakukan dengan perhitunganmatematis.
3. Mikrokontroler yang digunakan ATmega328P.
TUJUAN DANMANFAAT
Tujuan dan manfaat dilakukan Tugas akhir ini adalah sebagai berikut:
1. Sebagai salah satu syarat untuk menyelesaikan masastudi 2. Mengetahui bagaimana perinsip kerja tacometer
3. Membuat alat ukur kecepatan yang cukupakurat.
SISTEMATIKAPENULISAN
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat sistematika laporan ini sebagai berikut:
BAB I PENDAHULUAN
Pada bab ini berisikan mengenai latar belakang , rumusan masalah, Tujuan penulisan, batasan masalah, serta sistematika penulisan.
BAB II DASAR TEORI
Bab ini berisi tentang teori dasar yang digunakan sebagai bahan acuan proyek tugas akhir, serta komponen yang perlu diketahui untuk mempermudah dalam memahami sistem kerja alat ini.
BAB III PERANCANGAN SISTEM
Pada bagian ini akan dibahas perancangan dari alat, yaitu diagram blok dari rangkaian, skematik dari masing-masing rangkaian dan diagram alir dari program yang akan diisikan ke mikrokontroler.
BAB IV PENGUJIAN DAN ANALISA RANGKAIAN
Pada bab ini akan dibahas hasil analisa dari rangkaian dan sistem kerja alat, penjelasan mengenai program-program yang digunakan untuk mengaktifkan rangkaian, penjelasan mengenai program yang diisikan ke mikrokontroler.
BAB V KESIMPULAN DAN SARAN
Bab ini merupakan penutup yang meliputi tentang kesimpulan daripembahasan yang dilakukan dari tugas akhir ini serta saran apakah rangkaian ini dapat dibuat lebih efisien dan dikembangkan perakitannya pada suatu metode lain yang mempunyai sistem kerja yang sama.
2.1 SENSOR
BAB II DASAR TEORI
Sensor adalah transduser yang berfungsi untuk mengolah variasi gerak, panas, cahaya atau sinar, magnetis, dan kimia menjadi tegangan serta arus listrik.
Transduser sendiri memiliki arti mengubah, resapan dari bahasa latin traducere Bentuk perubahan yang dimaksud adalah kemampuan merubah suatu energi kedalam bentuk energi lain. Sensor yang sering menjadi digunakan dalam berbagai rangkaian elektronik antara lainsensor cahaya atau sinar, sensor suhu, serta sensortekanan.
Contoh; Camera sebagai sensor penglihatan, telinga sebagai sensor pendengaran, kulit sebagai sensor peraba, LDR (light dependent resistance) sebagai sensor cahaya, dan lainnya.Dalam memilih peralatan sensor dan transduser yang tepat dan sesuai dengan sistem yang akan disensor maka perlu diperhatikan persyaratan umum sensor berikut ini
A linearitas sensor
Ada banyak sensor yang menghasilkan sinyal keluaran yang berubah secara kontinyu sebagai tanggapan terhadap masukan yang berubah secara kontinyu.Sebagai contoh, sebuah sensor panas dapat menghasilkan tegangan sesuai dengan panas yang dirasakannya.Dalam kasus seperti ini,biasanya dapat diketahui secara tepat bagaimana perubahan keluaran dibandingkan dengan masukannya berupa sebuah grafik.Gambar dibawah memperlihatkan hubungan dari dua buah sensor panas yang berbeda.Garis lurus pada gambar (a).memperlihatkan tanggapan linier, sedangkan pada gambar (b). adalah tanggapan non-linier
b. SensitivitasSensor
Sensitivitas akan menunjukan seberapa jauh kepekaan sensor terhadap kuantitas yang diukur. Sensitivitas sering juga dinyatakan dengan bilangan yang menunjukan “perubahan keluaran dibandingkan unit perubahan masukan”.
Beberepa sensor panas dapat memiliki kepekaan yang dinyatakan dengan “satu volt per derajat”, yang berarti perubahan satu derajat pada masukan akan menghasilkan perubahan satu volt pada keluarannya. Sensor panas lainnya dapat saja memiliki kepekaan “dua volt per derajat”, yang berarti memiliki kepakaan
dua kali dari sensor yang pertama. Linieritas sensor juga mempengaruhi
sensitivitas dari sensor. Apabila tanggapannya linier, maka sensitivitasnya juga akan sama untuk jangkauan pengukuran keseluruhan. Sensor dengan tanggapan pada gambar (b) akan lebih peka pada temperatur yang tinggi dari pada ti
Frekuensi adalah jumlah siklus dalam satu detik dan diberikan dalam satuan hertz (Hz). { 1 hertz berarti 1 siklus per detik, 1 kilohertz berarti 1000 siklus per detik].
Pada frekuensi rendah, yaitu pada saat temperatur berubah secara lambat, termometer akan mengikuti perubahan tersebut dengan “setia”. Tetapi apabila perubahan temperatur sangat cepat lihat gambar (b) maka tidak diharapkan akan melihat perubahan besar pada termometer merkuri, karena ia bersifat lamban dan hanya akan menunjukan temperatur rata-rata.Ada bermacam cara untuk menyatakantanggapan
Secara umum berdasarkan fungsi dan penggunaannya sensor dapat dikelompokan menjadi 3 bagian yaitu:
1. Sensor Thermal (SensorSuhu)
Sensor thermal adalah sensor yang digunakan untuk mendeteksi gejala perubahan panas/temperature/suhu pada suatu dimensi benda atau dimensi ruang tertentu.Contohnya; bimetal, termistor, termokopel, RTD, photo transistor, photo dioda, photo multiplier, photovoltaik, infrared pyrometer, hygrometer, dsb.
2. SensorMekanis
Sensor mekanis adalah sensor yang mendeteksi perubahan gerak mekanis, seperti perpindahan atau pergeseran atau posisi, gerak lurus dan melingkar, tekanan, aliran, level dsb. Contoh; strain gage, linear variable deferential transformer (LVDT), proximity, potensiometer, load cell, bourdon tube, dsb.
3. Sensor Optik (SensorCahaya)
Sensor optic atau cahaya adalah sensor yang mendeteksi perubahan cahaya dari sumber cahaya, pantulan cahaya ataupun bias cahaya yang mengernai benda atau
ruangan. Contoh; photo cell, photo transistor, photo diode, photo voltaic, photo multiplier, pyrometer optic,dsb.Sensor merupakan indera bagi perangkat elektronika, oleh karena itu perlu ketelitian dan biak dalam menentukan sensor yang digunakan.
2.1.1 SENSOR INFRARED OPTOCOUPLER
Optocoupler juga dikenal dengan sebutan Opto-isolator, Photocoupler atau Optical Isolator.Optocoupler adalah komponen elektronika yang berfungsi sebagai penghubung berdasarkan cahaya optik.Pada dasarnya Optocoupler terdiri dari 2 bagian utama yaitu Transmitter yang berfungsi sebagai pengirim cahaya optik dan Receiver yang berfungsi sebagai pendeteksi sumbercahaya.
Masing-masing bagian Optocoupler (Transmitter dan Receiver) tidak memiliki hubungan konduktif rangkaian secara langsung tetapi dibuat sedemikian rupa dalam satu kemasan komponen
Jenis-jenis Optocoupler yang sering ditemukan adalah Optocoupler yang terbuat daribahanSemikonduktordanterdiridarikombinasiLED (Light Emitting Diode) danPhototransistor.DalamKombinasiini, LEDberfungsisebagaipengirimsinyal cahaya optik (Transmitter) sedangkan Phototransistor berfungsi sebagai penerima cahaya tersebut (Receiver). Jenis-jenis lain dari Optocouplerdiantaranya adalah
kombinasi LED-Photodiode, LED-LASCR dan juga Lamp-Photoresistor.Pada prinsipnya, Optocoupler dengan kombinasi LED-Phototransistor adalah OptocoupleryangterdiridarisebuahkomponenLED(LightEmittingDiode)yang
memancarkancahayainframerah(IRLED)dansebuahkomponensemikonduktor yangpekaterhadapcahaya(Phototransistor)sebagaibagianyangdigunakanuntuk mendeteksi cahaya infra merah yang dipancarkan oleh IRLED.
Gambar 2.4 sensor optocoupler Sensor kecepatan ( RPM )
Proses penginderaan sensor kecepatan merupakan proses kebalikan dari suatu motor, di mana suatu poros/object yang berputar pada suatui generator akan menghasilkan suatu tegangan yang sebanding dengan kecepatan putaran object.
Kecepatan putar sering pula diukur dengan menggunakan sensor yang mengindera pulsa magnetis (induksi) yang timbul saat medan magnetis terjadi. Sensor kecepatan atau velocity sensor merupakan suatu sensor yang digunakan untuk mendeteksi kecepatan gerak benda untuk selanjutnya diubah kedalam bentuk sinyal elektrik. Dalam prakteknya ada beberapa sensor yang digunakan untuk berbagai keperluan ini, salah satu sensor tersebut adalah Tachometer
Cara kerja sensor kecepatan ( RPM )
Rangkain sensor mendeteksi jumlah putaran per satuan hal ini telah di akomodasikan oleh kits spc dc motor pada ini untuk mendteksi pulsa kecepatan motor
Sebagai kecepatan input tranmisi ( top brake up ) pada keypad dan output display 7 segemen penekanan top memutar motor pada kecepatan maksimumpenekana up dengan down mengurangi dan menambah nilai PWM sebesar 10 d. penekanan N menghentikan putaran motor. Penekanan brake menghentikan putaran motor secara cepat
Prinsip Kerja Sensor Kecepatan (RPM)
suatu poros/object yang berputar pada suatui generator akan menghasilkan suatu teganganyangsebandingdengankecepatanputaranobject.Kecepatanputarsering pula diukur dengan menggunakan sensor yang mengindera pulsa magnetis (induksi) yang timbul saat medan magnetisterjadi.
Tachometer adalah sebuah instrumen atau alat yang mampu untuk mengukur kecepatan putaran dari poros engkol atau piringan, seperti yang terdapat pada sebuah motor atau mesin lainnya. Alat ini biasanya menampilkan revolutions per minute (RPM) pada sebuah pengukur skala analog, namun yang versi tampilan digital juga.
Dalam aplikasi kendaraan bermotor, pemasangan tachometer dengan tujuan agar pengendara dapat menggunakan mesin secara efisien.Tachometer yang terdapat pada mobil, pesawat terbang dan kendaraan-kendaraan lainnya biasanya menunjukan tingkat rotasi/perputaran pada poros engkol mesin, dan secara tipikal sudah menandakan indikasi jangkauan keselamatan dari perputaran mesin.Hal ini mampu menolong pengemudi dalam menyeleksi akselerasi yang pas dan pengaturan rotasi mesin untuk segala macam kondisi pengendaraan. Tachometer akan memberikan peringatan kepada pengemudi apabila tingkat putaran mesin
sudah pada tahap “maksimum”. Tachometer dikendalikan oleh putaran kabel dari sebuah unit pengendali yang dimasukkan kedalam mesin (biasanya pada poros engkol)jugaada-biasanyapadasistemmesindieselsederhanayangmenggunakan basis sistem elektris ataupun tanpa sistem elektrik.Pada sistem manajemen mesin yang umumnya terdapat pada kendaraan-kendaraan moderen, sinyal untuk tachometer biasanya dihasilkan dari sebuah mesin ECU yang menghantarkan informasi baik dari sensor kecepatan putaran yang terdapat pada porosengkol.
MIKROKONTROLER
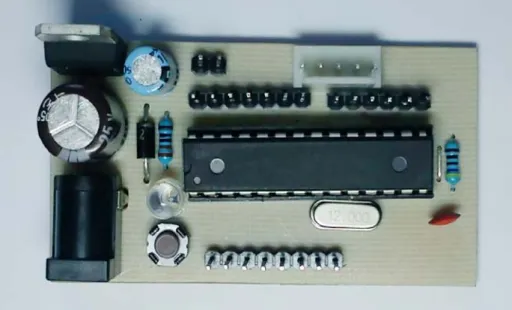
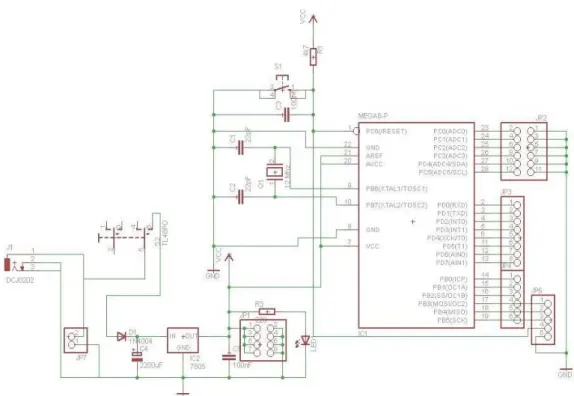
Mikrokontroler adalah mikroprosesor yang telah dilengkapi dengan memori, IO, dan peripheral dalam satu chip [1]. Dengan kelengkapan tersebut sebuah mikrokontroler dapat melakukan komputasi juga pegontrolan suatu sistem secara mandiri .Namun diperlukan rangkaian tambahan untuk melakukan eksekusi program yang ada di dalam mikrokontroler tersebut.Rangkaian ini biasa disebut dengan rangkaian sistem minimum mikrokontroler.
Sistem minimum atau yang biasa disingkat sismin. Rangkaian sistem minimum pada dasarnya terdiri dari komponen kristal, kapasitor nonpolar dan rangkaian suplai tegangan. Perhatikan gambar :
Gambar 2.1 sistem minimum
Gambar 2.2 rangkaian sistem minimum
Rangkaian sistem minimum berfungsi sebagai pengatur clock pada mikrokontroler.Rangkaian ini sebagai rangkaian penabuh yang digunakan untuk satuan frekuensi pada mikrokontroler.Juga berfungsi sebagai rangkaian minimum untuk melakukan pemrograman mikrokontroler. Komponen yang berfungsi untuk membangkitkan frekuensi ini adalah komponen kristal. Ada berbagai tipe mikrokontroler yang beredar di pasaran, dalam tugas akhir ini digunakan mikrokontroler ATmega328P.
ATMEGA328P
AT-Mega 32P merupakan jenis mikrokontroler yang memiliki performa tinggi dengan konsumsi daya rendah. Mikrokontroler ini merupakan mikrokontroler seri 8 bit yang dimiliki oleh Atmel AVR [2].ATMega328 memiliki beberapa fitur antara lain :
a) 1. 130 macam instruksi yang hampir semuanya dieksekusi dalam satu siklusclock.
b) 2. 32 x 8-bit register serbaguna.
c) 3. Kecepatan mencapai 16 MIPS dengan clock 16MHz.
d) 4. 32 KB Flash memory dan pada arduino memiliki bootloader yang menggunakan 2 KB dari flash memori sebagaibootloader.
e) 5. Memiliki EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 1KB sebagai tempat penyimpanan data semi permanent karena EEPROM tetap dapat menyimpan data meskipun catu daya dimatikan.
f) 6. Memiliki SRAM (Static Random Access Memory) sebesar2KB.
g) 7. Memiliki pin I/O digital sebanyak 14 pin 6 diantaranya PWM (Pulse Width Modulation)output.
h) 8. Master / Slave SPI Serialinterface.
Mikrokontroller ATmega 328 memiliki arsitektur Harvard, yaitu memisahkan memori untuk kode program dan memori untuk data sehingga dapat memaksimalkan kerja dan parallelism.Instruksi – instruksi dalam memori program dieksekusi dalam satu alur tunggal, dimana pada saat satu instruksi dikerjakan instruksi berikutnya sudah diambil dari memori program.
Konsep inilah yang memungkinkan instruksi – instruksi dapat dieksekusi dalam setiap satu siklus clock.32 x 8-bit register serba guna digunakan untuk mendukung operasi pada ALU (Arithmatic Logic unit) yang dapat dilakukan dalam satu siklus. 6 dari register serbaguna ini dapat digunakan sebagai 3 buah register pointer 16-bit pada mode pengalamatan tidak langsung untuk mengambil data pada ruang memori data Ketiga register pointer 16-bit ini disebut dengan register X ( gabungan R26 dan R27 ), register Y ( gabungan R28 dan R29 ), dan register Z ( gabungan R30 dan R31 ). Hampir semua instruksi AVR memiliki format 16-bit. Setiap alamat memori program terdiri dari instruksi 16-
bit atau 32-bit. Selain register serba guna di atas, terdapat register lain yang terpetakan dengan teknik memory mapped I/O selebar 64 byte. Beberapa register ini digunakan untuk fungsi khusus antara lain sebagai register control Timer/
Counter, Interupsi, ADC, USART, SPI, EEPROM, dan fungsi I/O lainnya.
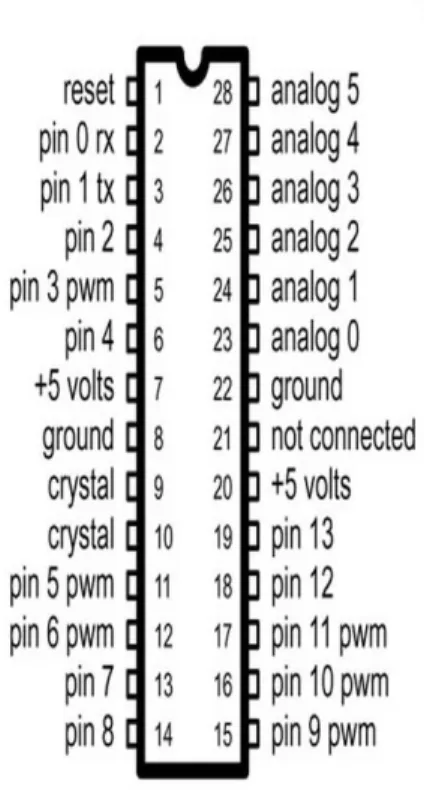
Register – register ini menempati memori pada alamat 0x20h – 0x5Fh. Pada gambar 2.3 dapat dilihat PIN MAP ATmega 328P.
Gambar 2.3 Pin Map ATmega 328P
Adapun rincian dan fungsi dari susunan pin ATMega328P adalah sebagai berikut (ATMEL, 2012):
1. VCC merupakan pin yang berfungsi sebagai masukan catudaya.
2. GND merupakan pinGround.
3. PortB(PB0–PB7)merupakanpinmasukan/keluaranduaarah(fullduplex)dan dengan masing-masing port memiliki fungsikhusus.
4. PortC(PC0–PC6)merupakanpinmasukan/keluaranduaarah(fullduplex)dan dengan masing-masing port memiliki fungsikhusus.
5. Port D (PD0 – PD7) merupakan pin masukan/keluaran dua arah (full duplex) dan dengan masing-masing port memiliki fungsikhusus.
6. RESET merupakan pin yang digunakan untuk mengatur ulangmikrokontroler.
7. XTAL1 dan XTAL2, merupakan pin masukan externalclock.
8. AVCC merupakan pin masukan tegangan untuk ADC (Analog-Digital Converter).
9. AREF merupakan pin masukan tegangan referensi untukADC.
Samahalnyadenganmikroprosesor,mikrokontroleradalahpirantiyangdirancang untuk kebutuhan umum.Fungsi utama dari mikrokontroler adalah mengontrol kerja mesin atau sistem menggunakan program yang disimpan pada sebuahROM.
Mikrokontroler merupakan komputer didalam chip yang digunakan untuk mengontrol peralatan elektronik, yang menekankan efisiensi dan efektifitas biaya.
Secara harfiah dapat disebut sebagai “pengendali kecil” dimana sebuah sistem elektronik yang sebelumnya banyak memerlukan komponen-komponen pendukung seperti IC TTL dan CMOS dapat direduksi/diperkecil dan akhirnya terpusat serta dikendalikan oleh mikrokontroler ini.
Mikrokonktroler digunakan dalam produk dan alat yang dikendalikan secara automatis, seperti sistem kontrol mesin, remote control, mesin kantor, peralatan rumah tangga, alat berat, dan mainan. Dengan mengurangi ukuran, biaya, dan konsumsi tenaga dibandingkan desain menggunakan mikroprosesor memori dan alat input output yang terpisah, kehadiran mikrokontroler membuat kontrol elektrik untuk berbagai proses menjadi lebih ekonomis. Dengan penggunaan mikrokontroler ini maka:
1. sistem elektronik akan menjadi lebihringkas,
2. rancang bangun sistem elektronik dapat dilakukan lebih cepat karena sebagian besar sistem merupakan perangkat lunak yang mudah dimodifikasi,
3. gangguan yang terjadi lebih mudah ditelusuri karena sistemnya yang kompak.
Namun,mikrokontrolertidaksepenuhnyadapatmereduksikomponenICTTLdan CMOS yang seringkali masih diperlukan untuk aplikasi kecepatan tinggi atau sekedar menambah jumlah saluran masukan dan keluaran (I/O). Dengan kata lain, mikrokontroler adalah versi mini atau mikro dari sebuah komputer karena mikrokontroler telah mengandung beberapa periferal yang langsung bisa dimanfaatkan, misalnya port paralel, port serial, komparator, konversi digitalke
analog (DAC), konversi analog ke digital dan sebagainya hanya menggunakan sistem minimum yang sederhana.
Agar sebuah mikrokontroler dapat berfungsi, maka mikrokontroler tersebut memerlukankomponeneksternalyangkemudiandisebutdengansistemminimum.
Untuk membuat sistem minimum paling tidak dibutuhkan sistem clock dan reset, walaupunpadabeberapamikrokontrolersudahmenyediakansistemclockinternal, sehingga tanpa rangkaian eksternal pun mikrokontroler dapatberoperasi.
Untuk merancang sebuah sistem berbasis mikrokontroler, kita memerlukan perangkat keras dan perangkat lunak, yaitu sistem minimum mikrokontroler, software pemrograman dan kompiler, serta downloader.Yang dimaksud dengan sistem minimum adalah sebuah rangkaian mikrokontroler yang sudah dapat digunakan untuk menjalankan sebuah aplikasi. Sebuah IC mikrokontroler tidak akan berarti bila hanya berdiri sendiri. Pada dasarnya, sebuah sistem minimum mikrokontroler AVR memiliki prinsip dasar yang sama dan terdiri dari 4 bagian, yaitu:
1. prosesor, yaitu mikrokontroler itusendiri,
2. rangkaianresetagarmikrokontrolerdapatmenjalankanprogrammulaidari awal,
3. rangkaian clock, yang digunakan untuk memberi detak padaCPU, 4. rangkaian catu daya, yang digunakan untuk memberisumberdaya.
2.3 LCD(Liquid Crystal Display)
Liquid Crystal Display (LCD) adalah komponen yang dapat menampilkan tulisan.Salah satu jenisnya memiliki dua baris dengan setiap baris terdiri atas enam belas karakter.LCD seperti itu biasa disebut LCD 16x2. LCD sangat berfungsi sebagai penampil yang nantinya akan digunakan untuk menampilkan status kerja alat.
Fitur LCD 16 x 2
Adapun fitur yang disajikan dalam LCD ini adalah : a. Terdiri dari 16 karakter dan 2baris.
b. Mempunyai 192 karaktertersimpan.
c. Terdapat karakter generatorterprogram.
d. Dapat dialamati dengan mode 4-bit dan8-bit.
e. Dilengkapi dengan backlight.
Gambar 2.5 LCD (Liquid Crystal Display)
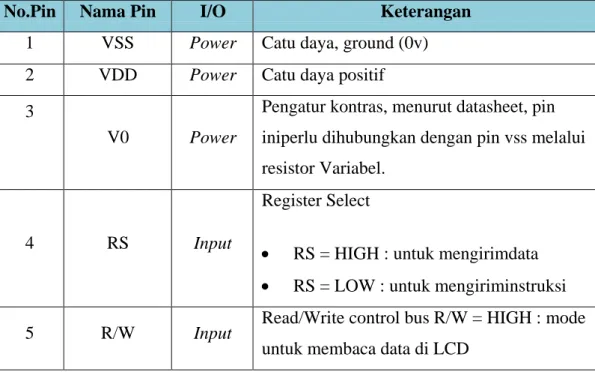
LCD memiliki 16 pin dengan fungsi pin masing-masing seperti yang terlihat pada table2.1.
Tabel 2.1 Pin-pin LCD
No.Pin Nama Pin I/O Keterangan 1 VSS Power Catu daya, ground (0v) 2 VDD Power Catu daya positif 3
V0 Power
Pengatur kontras, menurut datasheet, pin iniperlu dihubungkan dengan pin vss melalui resistor Variabel.
4 RS Input
Register Select
• RS = HIGH : untuk mengirimdata
• RS = LOW : untuk mengiriminstruksi 5 R/W Input Read/Write control bus R/W = HIGH : mode
untuk membaca data di LCD
Gambar 2.6 Penampang komponen penyusun LCD
Keterangan:
1. Film dengan polarizing filter vertical untuk memolarisasi cahaya yangmasuk.
2. Glass substrate yang berisi kolom-kolom elektroda Indium tin oxide(ITO).
3. Twisted nematic liquid crystal (kristal cair dengan susunanterpilin).
4. Glass substrate yang berisi baris-baris elektroda Indium tin oxide(ITO).
5. Film dengan polarizing filter horizontal untuk memolarisasi cahaya yang masuk.
6. Reflektor cahaya untuk memantulkan cahaya yang masuk LCD kembali ke mata pengamat.
Sebuah citra dibentuk dengan mengombinasikan kondisi nyala dan mati dari pixel-pixel yang menyusun layar sebuah LCD. Pada umumnya LCD yang dijual di pasaran sudah memiliki integrated circuit tersendiri sehingga para pemakai dapat mengontrol tampilan LCD dengan mudah dengan menggunakan mikrokontroler untuk mengirimkan data melalui pin-pin input yang sudah tersedia
2.3.1 Cara kerja LCD
Pada aplikasi umumnya RW diberi logika rendah “0”.Bus data terdiri dari 4bit atau 8 bit. Jika jalur data 4 bit maka yang digunakan ialah DB4 sampai dengan DB7. Sebagaimana terlihat pada table deskripsi, interface LCD merupakan sebuah parallel bus, dalam hal ini sangat memudahkan dan sangat cepat dalam pembacaan dan penulisan data dari atau ke LCD. Kode ASCII yang ditampilkan sepanjang 8bit dikirim ke LCD secara 4bit atau 8bit pada satuwaktu
Jika mode 4bit yang digunakan, maka 2 nibble data dikirim untuk membuat sepenuhnya 8bit (pertama dikirim 4bit MSB lalu 4bit LSB dengan pulsa clock EN setiap nibblenya). Jalur control EN digunakan untuk memberitahu LCD bahwa mikrokontroler mengirimkan data ke LCD. Untuk mengirim data ke LCD program harus menset EN ke kondisi high “1” dan kemudian menset dua jalur control lainnya (RS dan R/W) atau juga mengirimkan data ke jalur data bus. Saat jalur lainnya sudah siap, EN harus diset ke “0” dan tunggu beberapa saat, dan set EN kembali ke high “1”. Ketika jalur RS berada dalam kondisi low “0”, data yang dikirimkan ke LCD dianggap sebagai sebuah perintah atau instruksi khusus (seperti bersihkan layar, posisi kursor dll). Ketika RS dalam kondisi high atau “1”, data yang dikirimkan adalah data ASCII yang akan ditampilkandilayar.
Misal, untuk menampilkan huruf “A” pada layar maka RS harus diset ke
“1”. Jalur control R/W harus berada dalam kondisi low (0) saat informasi pada data bus akan dituliskan ke LCD. Apabila R/W berada dalam kondisi high “1”, maka program akan melakukan query data dari LCD. Instruksi pembacaan hanya satu, yaitu Get LCD status, lainnya merupakan instruksi penulisan, Jadi hamper setiap aplikasi yang menggunakan LCD, R/W selalu di set ke “0”. Jalur data dapat terdiri 4 atau 8 jalur.Mengirimkan data secara parallel baik 4bit atau 8bit merupakan 2 mode operasiprimer.
Untuk membuat sebuah aplikasi interface LCD, menentukan mode operasi merupakan hal yang paling penting. Mode 8bit sangat baik digunakan ketika kecepatan menjadi keutamaan dalam sebuah aplikasi dan setidaknya minimal tersedia 11 pin I/0 (3pin untuk control, 8pin untuk data).Sedangkan mode 4bit minimal hanya membutuhkan 7bit (3pin untuk control, 4 pin untuk data). Bit RS digunakan untuk memilih apakah data atau instruksi yang akan ditransfer antara mikrokontroler dan LCD. Jika bit ini diset (RS = 1), maka byte pada posisi kursor
LCD saat itu dapat dibaca atau ditulis. Jika bit ini di reset (RS = 0), merupakan instruksi yang dikirim ke LCD atau status eksekusi dari instruksi terakhir yang dibaca.
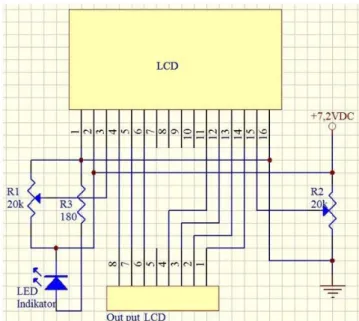
Gambar 2.7 Skematik LCD 16 x 2 .
POTENSIOMETER
Potensiometer ada terrlah salah satu jenis resistor yang nilai resitansinya dapat di atur sesuai dengan kebutuhan rangkain elektronika ataupun pemakainnya.
Potensiometer merupakan keluarga resistor yang tergolong dalam kategori varuable resistor. Secara sruktur, potensiometer terdiri dari 3 kaki terminal dengan sebuah shaft atau taus yang berfungsi sebagai pengaturnya. Resistor tiga terminal dengan sambungan geser yang membentuk pembagi tegangan dapat di setel. Jika hanya 2 terminal yang digunakan (salah satu terminal tetap dan
terminalgeser). Potensiometer berperan sebagai variable atau rheostrat.
Potensiometer biasanya digunakan untuk mengendalikan peranti elektronik seperti pengendali suara pada penguat. Potensiometer yang dioperasiakan oleh suatu mekanisme dapat digunakan sebagai transduser, misalnya sebagai sensor joystick.,Elemen,resistif,badan,penyapu(wiper),sumbu,sambungan,tetap
pertama,sambungan penyapu,cincin,baut,sambungan tetap terbuka. Potensiometer jarang digunakan untuk mengendalikan daya tinggi (lebih dari 1 watt) secara langsung. Potensiometer digunakan untuk taraf isyarat analog(misalnya
pengendali suara peranti audio), dan sebagai pengendali masukan untuk sirkiut elektronik. Sebagai contoh sebuah peredup lampu mengunakan mungunakan potensiometer untuk mengendalikan pensakelaran sebuah triac, jadi secara tidak langsung mengendaliakn kecerahan lampu
Potensiometer yang digunakan sebagai pengendali volume kadang kadang dilengkapi dengan saklar yang yang terintegrasi, sehingga potensiometer membuka sakelar saat menyaou menyaou berada pada posisi terendah.Sebuah potensiometer biasanya dibuat dari sebuah unsur resistif semi-lingkar dengan sambungan geser (penyapu). Unsur resistif, dengan terminal pada salah satu ataupun kedua ujungnya, berbentuk datar atau menyudut, dan biasanya dibuat dari grafit, walaupun begitu bahan lain mungkin juga digunakan sebagai gantinya.
Penyapu disambungkan ke terminal lain. Pada potensiometer panel, terminal penyapu biasanya terletak di tengah-tengah kedua terminal unsur resistif.Untuk potensiometer putaran tunggal, penyapu biasanya bergerak kurang dari satu putaran penuh sepanjang kontak.Potensiometer "putaran ganda" juga ada, elemen resistifnya mungkin berupa pilinan dan penyapu mungkin bergerak 10, 20, atau lebih banyak putaran untuk menyelesaikan siklus. Walaupun begitu, potensiometer putaran ganda murah biasanya dibuat dari unsur resistif konvensional yang sama dengan resistor putaran tunggal, sedangkan penyapu digerakkan melalui gir cacing. Disamping grafit, bahan yang digunakan untuk membuat unsur resistif adalah kawat resistansi, plastik partikel karbon dan campuran keramik-logam yang disebut cermet.Pada potensiometer geser linier, sebuah kendali geser digunakan sebagai ganti kendali putar.Unsur resistifnya adalah sebuah jalur persegi, bukan jalur semi-lingkar seperti pada potensiometer putar.Potensiometer jenis ini sering digunakan pada peranti penyetel grafik, seperti ekualizer grafik.Karena terdapat bukaan yang cukup besar untuk penyapu dan kenob, potensiometer ini memiliki reliabilitas yang lebih rendah jika digunakan pada lingkungan yangburuk.
Potensiometer tersedia dengan relasi linier ataupun logaritmik antara posisi penyapu dan resistansi yang dihasilkan (hukum potensiometer atau taper
Pembuat potensiometer jalur konduktif menggunakan pasta resistor polimer konduktifyangmengandungresindanpolimer,pelarut,pelumasdankarbon.Jalur dibuat dengan melakukan cetak permukaan papua pada substrat fenolik dan memanggangnya pada oven. Proses pemanggangan menghilangkan seluruh pelarut dan memungkinkan pasta untuk menjadi polimer padat. Proses ini menghasilkan jalur tahan lama dengan resistansi yang stabil sepanjangoperasi
JENIS JENISPOTENSIOMETER
Berdasarkan bentuknya, Potensiometer dapat dibagi menjadi 3 macam, yaitu : 1. Potensiometer Slider, yaitu Potensiometer yang nilai resistansinya dapat
diatur dengan cara menggeserkan Wiper-nya dari kiri ke kanan atau dari bawah ke atas sesuai dengan pemasangannya. Biasanya menggunakan Ibu Jari untuk menggeserwiper-nya.
2. Potensiometer Rotary, yaitu Potensiometer yang nilai resistansinya dapat diatur dengan cara memutarkan Wiper-nya sepanjang lintasan yang melingkar. Biasanya menggunakan Ibu Jari untuk memutar wiper tersebut.
Oleh karena itu, Potensiometer Rotary sering disebut juga dengan ThumbwheelPotentiometer.
3. Potensiometer Trimmer, yaitu Potensiometer yang bentuknya kecil dan harus menggunakan alat khusus seperti Obeng (screwdriver) untuk memutarnya. Potensiometer Trimmer ini biasanya dipasangkan di PCB dan jarang dilakukan pengaturannya
1. Secara manual potensiometer dapat dibagi menjadi 2 jenis, yaitu potensiometer dengan gerakan berputar (potensiometer putar) dan potensiometerlinier.
- Potensiometer putar adalah jenis potensiometer yang paling umum dimana wiper bergerak dengan jalan melingkar(memutar).
- Potensiometer linier adalah jenis potensiometer dimana wiper bergerak pada sepanjang jalur linier. Potensio linier juga dikenal sebagai slider, pot slide, ataufader.
2. Potensiometer digital adalah potensiometer yang dikontrol secara elektronik.
Dalam kebanyakan kasus mereka ada dari berbagai komponen resistif kecil secara seri. Setiap elemen resistif dilengkapi dengan saklar yang dapat berfungsi sebagai tap-off point atau posisi wipersebenarnya.
3. Rheostat adalah resistor variabel dua terminal dan seringkali didesain untuk menangani arus dan tegangan yang tinggi. Sebuah potensiometer juga dapat digunakan sebagai rheostat, atau resistensi variabel tunggal. Cara terbaik untuk menggunakan potensiometer sebagai rheostat adalah dengan menghubungkan wiper dan ujung satu terminal lainnya menjadi satu. Hal ini dilakukan untuk mencegah bila wiper menjadi hilang kontak/ putus kontak akibat kotoran atau sebagainya.
PRINSIP KERJAPOTENSIOMETER
Potensiometer merupakan resistor yang.menggunakan tiga terminal dengan sambungan geser yang membentuk pembagi tegangan yang dapat di stel.
Biasanya perangkat elektronika ini juga ada yang menggunakan dua terminal, sehingga nantinya salah satu terminal tetap dan terminal geser.Komponen yang satu ini berperan sebagai resistor variabel atau rheostat.Potensiometer biasanya di gunakan untuk mengendalikan peranti elektronik seperti pengendali suara pada penguat yang kita bunyikan.Potensio yang biasanya di operasikan ataupun di gunakan oleh suatu alat mekanisme sebagai transduser, misalnya sebagai sensor joystick.Perangkat potensiometer sangat jarang di gunakan untuk mengendalikan daya tinggi (tegangan lebih dari 1 watt) secara langsung.Potensiometer digunakan untuk menyetel taraf isyarat analog, misalnya pengendali suara pada peranti audio dan juga sebagai pengendali masukan untuk sirkuit elektronik. Prinsip kerja potensiometer dapat di ibaratkan sebagai gabungan dua buah resistoryang di hubungkan secara seri R1 dan R2. Di dalam dua buah resistor ini nilai resistansinya dapat di rubah. Nilai resistansi total dari resistor akan selalu tetap dan nilai ini merupakan nilai resistansi dari potensiometer. Jikanilai resistansi R1 kita perbesar, maka otomatis nilai resistansi dari R2 akan berkurang, begitu juga sebaliknya. Potensiometer Meskipun di samakan dengan resistor,tapi
bentuk dari potensiometer sendiri sangat jauh berbeda dengan bentuk resistor pada umumnya. Resistor hanya berbentuk gelang yang di mana masing-masing gelang tersebut memiliki warna yang berbeda, ini di gunakan untuk menentukan nilai tahanannya.Sementara untuk menentukan nilai tahanan dari potensio hanya dengan memutar ataupun menggeser pada bagian yang sudah di tetapkan.Pengendali volume yang menggunakan potensiometer di lengkapi dengan saklar yang sudah terintegrasi, sehingga pada saat potensiometer membuka saklar, penyapu berada pada posisi terendah.Kebanyakan dari komponen ini di gunakan untuk rangkaian power amplifier pengatur volume, bass dan treble.Dan juga dalam Control Motor DC yang berfungsi sebagai pengatur kecepatan putaran motor.Nilai dari potensiometer dapat berubah sesuai dengan perputaran ataupun pergeseran yang di hasilkan. Range yang di hasilkan juga bervariasi, misalnya nilai yang tertera pada potensio adalah 100k ohm, maka range resistansi akan dimulai dari tahanan 0 ohm sampai dengan 100kohm
DINAMO
Dinamo adalah alat untuk merubah energi Listrik menjadi energi gerak dan dari energi gerak menjadi energi listrik
A. bagaima dari energi listrik itu bisa menjadi energigerak?
1. Kita tahu bahwa sebuah kumparan atau lilitan dialiri arus listrik akan menjadi medan magnet dinamis ( tidak permanen) hanya berlaku seperti medan magnet ketika di aliri aruslistrik.
2. Lihat gambar, ketika plat tembaga berwarna emas di aliri arus listrik, dari plat tembaga mengalirkan arus listrik ke kumparan. nah kumparan pun menjadi medan magnet.
3. ketika kumparan menjadi medan magnet maka terjadi lah tolak menolak antara magnet yang berada di dinding dinamo dengan kumparan. tolak menolak itu trus terjadi sehinga kumparan bergerak. pergerakan kumparan telah di atur dengan stabil oleh cover dinamo yang menyebab kan putaran memutar dan diteruskan kebesi yang menopang kumparan sampai ke gear yang menempel pada besi ikut berputar.
Pada dinamo tidak di atur plat tembaga mana yg menjadi kutub positif dan negatif.
Jika sebuah plat tembaga kita andaikan kutub (+) maka ketika kutub positif yang telah kita tandai tadi dialiri arus negatif, dinamo akan tetap berputar " Hanya putaran dinamo yang berubah, jika sebelumnya ke kanan maka akan memutar ke kiri ".
B. Bagaiman Dari energi gerak menjadi energilistrik?
1. Contohdinamosepeda,ketikageardinamoditemperkanpadarodasepedayangberputar, maka akan memaksa kumparan yang ada di dalam dinamo berputar. terjadilah gesekan medan magnet antara kumparan dengan magnet di dinding dinamo yang mengkasilkan eletron-elektron bebas yang menempel pada dinding plattembaga.
2. eletron-elektrokyang bersifat listrik makin lama makin banyak menempel pada plat tembaga sehingga menghasilkanlistrik.
3 semakin kencang putaran yang terjadi maka energi listrik pun akan semakin besar yang mampu menyalakan lampusepeda.
Gambar 2.8 dinamo
PRINSIP KERJADINAMO
Dinamo dibedakan menjadi dua yaitu, dinamo arus searah (DC) dan dinamo arus bolak-balik (AC). Adapun Prinsip kerja dinamo sama dengan generator dalam kumparan. Dimana, bagian dinamo yang berputar disebut rotor, dan bagian dinamo yang tidak bergerak disebut stator.
• Bagan dinamoAC,
• Bagan dinamoDC
Perbedaan antara dinamo DC dengan dinamo AC terletak pada cincin yang digunakan.Pada dinamo arus searah menggunakan satu cincin yang dibelah menjadiduayangdisebutcincinbelah(komutator).Cincininimemungkinkanarus listrik yangdihasilkanpadarangkaianluardinamoberupaarussearahwalaupundi
FUNGSIDINAMO
Fungsi dinamo yaitu perantiyang merubah energy listrik menjadi enrgi putar mengubahenergylistrik menjadienergyputar.Contohpengunaandinamo.Fungsi dioda dalam komponen elektronika adalah sebagai penyearah arus,sebagai catu daya,sebagai penyaring atau penddeteksi dan untuk stabilator tengangan.fungsi kapasitor pada ac splitsetiap mesin elektronik sebagain besar selalu dibekali dengan tahanan. Alat ini digunakan untuk membantu startkompresor
Cara Mengatur Kecepatan Putaran Motor DC – Motor DC adalah salah satu jenis motor listrik yang banyak digunakan pada rangkaian elektronika, mulai dari robot line following sampai dengan mobile robot lainnya. Tak heran memang karena selain harganya murah, motor DC juga sangat mudah dikontrol dibandingkan dengan jenis motor listrik lainnya.
Saat ini ada berbagai macam jenis motor DC mulai dari yang kecil sampai yang besar. Untuk dapat bisa menggunakan motor DC diperlukan sebuah rangkaian driver.Pada artikel sebelumnya, Belajar Elektronika juga sudah pernah menjelaskan mengenai rangkaian driver motor DC.Bagi anda yang belum tahu, silahkan dicari.
Salah satu masalah yang banyak dialami oleh pengguna motor DC adalah sulitnya mengatur kecepatan putaran. Pengguna hanya bisa mengatur putaran motor DC hanyadenganmenggantinilaiinputtegangannyasaja.Padahaladacara yanglebih mudah, yakni dengan menggunakan bantuanpotensiometer
Mengatur Kecepatan Motor DC dengan PWM
• PengertianPWM
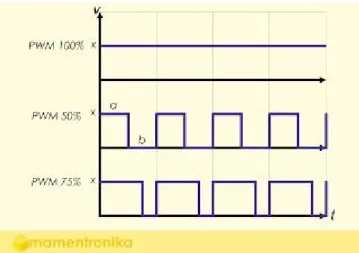
Salah satu cara untuk mengatur kecepatan putar motor dc adalah dengan metode modulasi lebar pulsa atau dalam bahasa inggris disebut pulse width modulation disingkat PWM. Gambar 1 menunjukan ilustrasi PWM, 100%, 50%, dan 75%.Sumbu vertical menunjukan besarnya tegangan dan sumbu horizontal menunjukan waktu.xmenandakan tegangan maksimum dari suatusistem.
Gambar 1. Ilustrasi PWM
Saat ini PWM dapat dihasilkan dari mikrokontroller, arduino, dan sejenisnya.Besar nilai pwm tergantung dari tipe board yang kita gunakan. Untuk Arduino UNO, pwm memiliki alokasi data 8bit, alias memiliki rentang data dari 0-255.
UMUM
BAB III
PERANCANGAN SISTEM
Perancangan merupakan suatu tahap yang sangat penting didalam penyelesaian pembuatan suatu alat ukur. Pada perancangan dan pembuatan alat ini akan ditempuh beberapa langkah yang termasuk kedalam langkah perancangan antara lainpemilihan
komponenyang sesuai dengan kebutuhan serta pembuatan alat. Dalam perancangan ini dibutuhkan beberapa petunjuk yang menunjang pembuatan alat seperti buku buku teori, data sheet atau buku lainnya dimana buku petunjuk tersebut memuat teori- teori perancangan maupun spesifikasi komponen yang akan digunakan dalam pembuatan alat, melakukan percobaan serta pengujian alat.
TUJUAN PERANCANGAN
Tahap terpenting dalam pembuatan suatu alat adalah perancangan.Hal- hal yang perlu diperhatikan dalam perancangan suatu alat meliputi prinsip kerja rangkaian, spesifikasi komponen yang terdapat pada rangkaian sehingga tidak terjadi kerusakan pada saat pemasangan komopnen.Tujuan perancangan adalah untuk memudahkan dalam pembuatan suatu alat serta mendapatkan suatu alat yang baik seperti yang diharapkan dengan memperhatikan penggunaan komponen dengan harga ekonomis serta mudah didapat dipasaran. Selain itu, itu perancangan juga bertujuan untuk membuat solusi dari suatu permasalahan dengan penggabungan prinsip- prinsip elektronik dan mekanik, serta dengan literatur dengan produk yang ada.
DIAGRAM BLOK
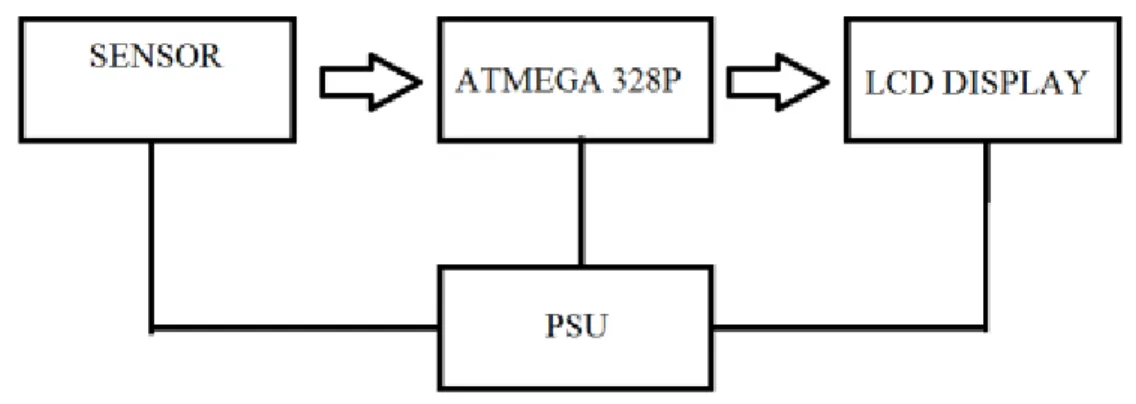
Diagram blok sangat efektif untuk menyederhanakan sistem yang rumit agar mudah dimengerti. Dalam tugas akhir ini sistem terdiri atas blok diagram yang terlihat pada gambar 3.1.
Gambar 3.1 Blok Diagram
Adapun fungsi masing masing blok diagram pada gambar 3.1 adalah sebagai berikut :
1. BlokSensor
Berfungsi sebagai inputan data ke mikrokontroler yang kemudian akan diproses untuk melakukan kerja tertentu
2. BlokMikroprosesor
Berfungsi sebagai pemroses sinyal sensor dan pengontrol yang memiliki tujuan tertentu yang terdiri atas mikrokontroler dan sistem minimum 3. BlokPSU
Berfungsi sebagai Power Supply untuk menyuplai tegangan ke mikrokontroler.
FLOWCHARTSISTEM
Gambar 3.2 Flowchart Sistem RANGKAIAN LCD DANMIKROKONTROLER
Rangkaian LCD dan mikrokontroler dapat dilihat pada gambar3.3.
Gambar 3.3 Rangkaian LCD dan ATmega 328P
RANGKAIAN SENSOR DANMIKROKONTROLER
Rangkaian sensor dan mikrokontroler dapat dilihat pada gambar 3.4.
Gambar 3.4 Rangkaian Sensor dan ATmega 328P
RANGKAIAN KESELURUHANSISTEM
Rangkaian keseluruhan sistem dapat dilihat pada gambar 3.5.
Gambar 3.5 Rangkaian Keseluruhan Sistem
BAB IV
PENGUJIAN ALAT DAN ANALISA RANGKAIAN PENGUJIAN MIKROKONTROLER
Pengujian mikrokontroler dapat dilakukan dengan membuat rangkaian seperti gambar 4.1 lalu menghubungkan rangkaian ke komputer via USB dan memasukan program awal seperti berikut:
void setup() {
pinMode(LED_BUILTIN, OUTPUT);
}
void loop() {
digitalWrite(LED_BUILTIN, HIGH);
delay(1000);
digitalWrite(LED_BUILTIN, LOW);
delay(1000);
}
Gambar 4.1 Rangkaian pengujian Mikrokontroler ATmega 328P
Hasil yang di tampilkan pada pengujian rangkaian diatas Led akan menyala secara periodik setiap 1detik.
PENGUJIAN LCD
Pengujian LCD dilakukan dengan memasukkan program kedalam mikrokontroler sebagai berikut :
#include <LiquidCrystal.h>
const int rs = 12, en = 11, d4 = 5, d5 = 4, d6 = 3, d7 = 2;
LiquidCrystal lcd(rs, en, d4, d5, d6, d7);
void setup() { lcd.begin(16, 2);
lcd.print("hello, world!");
}
void loop() {
lcd.setCursor(0, 1);
lcd.print(millis() / 1000);
}
Hasil yang di tampilkan pada layar LCD adalah sebagai berikut :
Gambar 4.2 Hasil Pengujian LCD display
PENGUJIAN SENSOR
Pengujian sensor dilakukan dengan memasukkan program dibawah ini kemudian hasil output speed sensor akan di baca oleh mikrokontroller dan data dibaca melalui monitoring port pada laptop. Berikut adalah program yang di upload pada mikrokontroller.
void setup () {
Serial.begin(9600);
}
void loop ()
{
int sensorValue = analogRead(A0);
Serial.println(sensorValue);
delay(1);
}
Pada layar akan tampil hasil pembacaan seperti berikut :
Gambar 4.3 Hasil Monitoring Sensor pada port COM 3
Apabila kecepatan motor berubah maka pembacaan sensor akan berubah pula.
Kemudian data ini akan dicatat dan dibandingkan dengan data dari alat pembanding atau perhitungan secara matematis. Berikut data sensor dengan data perhitungan kecepatan sensor.
Tabel 4.1 Hasil Pembacaan Sensor
NO
PEMBACAAN
RALAT RALAT
(%) SENSOR KECEPATAN
MATEMATIS
1 85 100 15 15
2 120 200 80 40
3 228 300 72 24
4 387 400 13 3.2
5 488 500 12 2.4
Berikut gambar proses kalibrasi sensor :
PENGUJIAN RANGKAIANKESELURUHAN
Setelah alat dikalibrasi dan dilakukan pengujian ulang maka didapat hasil pengujian sebagai berikut :
Tabel 4.2 Hasil Pengujian Seluruh rangkaian
NO
PEMBACAAN
RALAT RALAT
SENSOR KECEPATAN (%) MATEMATIS
1 110 100 10 10
2 191 200 9 4.5
3 275 300 25 8.3
4 405 400 5 1.25
5 488 500 12 2.4
Rata – rata ralat 0.73
TAMPILAN ALAT
Berikut Gambar Tampilan Keseluruhan alat :
Gambar 4.5 Tampilan Alat
KESIMPU LAN
BAB V
KESIMPULAN DAN SARAN
Dari perancangan dan pengujian alat dapat disimpulkan hal hal sebagai berikut:
SARAN
1. Hasil pengujian alat memiliki akurasi 99% hal ini dapat dikatakan cukupakurat.
2. Sensor kecepatan berfungsi dengan baik dalam membaca kecepatan putaranroda.
3. Sensor optocopler mampu membaca kecepatan dengan error maksimum10%.
Untuk Pengembangan selanjutnya perlu diperhatikan hal – hal sebagai berikut : 1. Sebaiknya dalam kalibrasi dapat dilakukan dengan alat
pembanding yang lebih akurat sehingga hasil sensor dapat dikatakan atau di jamin pembacaan datasebenarnya
2. Perancangan alat dibuat lebih baik lagi sehingga lebih mudah dalam penggunaan dan dapat diaplikasikan kepada peralatan umum.
DAFTAR PUSTAKA
[1] Sumardi,” MIKROKONTROLER belajar AVR mulai dari nol”. Edisi pertama . Yogyakarta: Graha Ilmu,2013.
[2] Atmel,”ATmega328/P”.microchip,November 2016 [online].Tersedia : http://ww1.microchip.com/downloads/en/DeviceDoc/Atmel-42735-8-bit-AVR-M icrocontroller-ATmega328-328P_Summary.pdf [diakses 20 april2018].
[3] http://www.atmel.com/dyn/resources/prod_documents/doc2508.pdf [4] Wardahana, Lingga. Belajar Sendiri Mikrokontroler AVR SeriATMega16
Simulasi, Hardware, dan AplikasiPenerbit Andi, Yogyakarta.2006.