Elektronika Industri & Otomasi
(IE-204)
BAB 3.
Sistem Pengaturan Otomatis
(Level 2 sistem otomasi)
Diktat ini digunakan bagi mahasiswa Jurusan Teknik Industri Fakultas Teknik
Universitas Kristen Maranatha
JURUSAN TEKNIK INDUSTRI - FAKULTAS TEKNIK
UNIVERSITAS KRISTEN MARANATHA
BANDUNG
2015
Halaman 22
Bab 3 Sistem pengaturan otomatis (Level 2 sistem otomasi)
3.1. Pendahuluan
Kontrol automatic atau yang dikenal dengan sistem pengendalian otomatis ( automatic control
system) merupakan level ke 2 dalam hirarki sistem otomasi.. Dalam sistem otomasi kegiatan pengontrolan dan monitoring yang biasa dilakukan manusia bisa digantikan perannya dengan menerapkan prinsip otomasi. Kegiatan kontrol yang dilakukan secara berulang-ulang,
kekurang-presisi-an manusia dalam membaca data, serta resiko yang mungkin timbul dari sistem yang
dikontrol semakin menguatkan kedudukan alat/mesin untuk melakukan pengontrolan secara otomatis.
Pengendalian otomatis (automatic control) dan piranti-piranti pengontrol otomatis dalam perkembangannya merupakan suatu disiplin ilmu sendiri yang disebut control engineering, control system engineering . Dengan berkembangnya teknologi komputer dan jaringan dimana konsep sistem otomasi dapat diwujudkan, ditambah dengan suatu kecerdasan melalui program yang ditanamkan dalam sistem tersebut , maka akan semakin meringankan tugas-tugas manusia. Derajad otomasi yang makin tinggi akan mengurangi peranan dan meringankan tugas-tugas manusia dalam pengontrolan suatu proses.
Beberapa contoh sistem pengaturan proses-proses pada industri modern seperti: 1. Sebagai pengontrol tekanan
2. Sebagai pengontrol temperature 3. Sebgai pengontrol kelembaban 4. Sistem aliran dalam proses industri
Mathematical tools / alat matematis yang digunakan antara lain:
Penyelesaian permaslahan dengan persamaan deferensial dan integral
Transformasi Laplace dan variable-variable kompleks.
Transformasi z untuk pengaturan diskrit
Dan berbagai tools dan konsep yang lebih advanced seperti fuzzy logic, neural network control system dll.
# Sistem pengendalian digolongkan menjadi 2 yaitu :
1. Sistem Pengendalian “Untai Terbuka” (Open loop system ), adalah sustu system yang tindakan pengendaliannya bebas dari keluarannya.
Halaman 23 2. Sistem Pengendalian “Untai Tertutup”(Closed Loop System ), adalah suatu system yang
tindakan pengendalianya tergantung pada keluarannya.
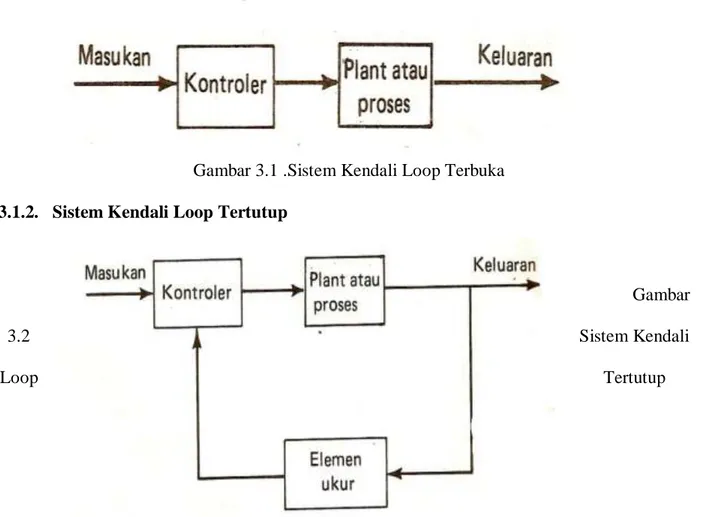
3.1.1. Sistem Kendali Loop Terbuka
Sistem Kendali Loop Terbuka adalah suatu sistem kendali yang keluarannya tidak akan berpengaruh terhadap aksi kendali. Sehingga keluaran sistem tidak dapat diukur dan tidak dapat digunakan sebagai perbandingan umpan balik dengan masukan. Jadi pada setiap masukan akan didapatkan suatu kondisi operasi yang tetap. Sedangkan ketelitiannya akan tergantung pada kalibrasi. Dalam prakteknya sistem kendali loop terbuka dapat digunakan jika hubungan output dan inputnya diketahui serta tidak adanya gangguan internal dan eksternal.
Gambar 2.1 SistG
Gambar 3.1 .Sistem Kendali Loop Terbuka
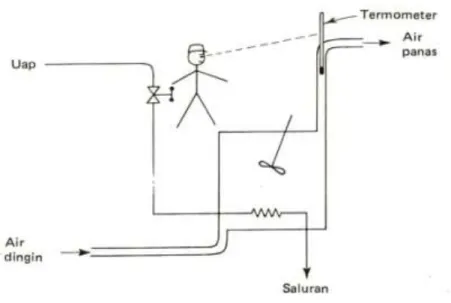
3.1.2. Sistem Kendali Loop Tertutup
Gambar
3.2 Sistem Kendali
Halaman 24 Sistem kendali loop tertutup adalah suatu sistem yang keluarannya berpengaruh langsung terhadap aksi kendali. Yang berupaya untuk mempertahankan keluaran sehingga sama bahkan hampir sama dengan masukan acuan walaupun terdapat gangguan pada sistem. Jadi sistem ini adalah sistem kendali berumpan balik, dimana kesalahan penggerak adalah selisih antara sinyal masukan dan sinyal umpan balik (berupa sinyal keluaran dan turunannya) yang diteruskan ke pengendali / controller sehingga melakukan aksi terhadap proses untuk memperkecil kesalahan dan membuat agar keluaran mendekati harga yang diingankan.
Contoh sistem kendali loop tertutup:
a. Sistem Kendali Loop Tertutup Manual
Halaman 25
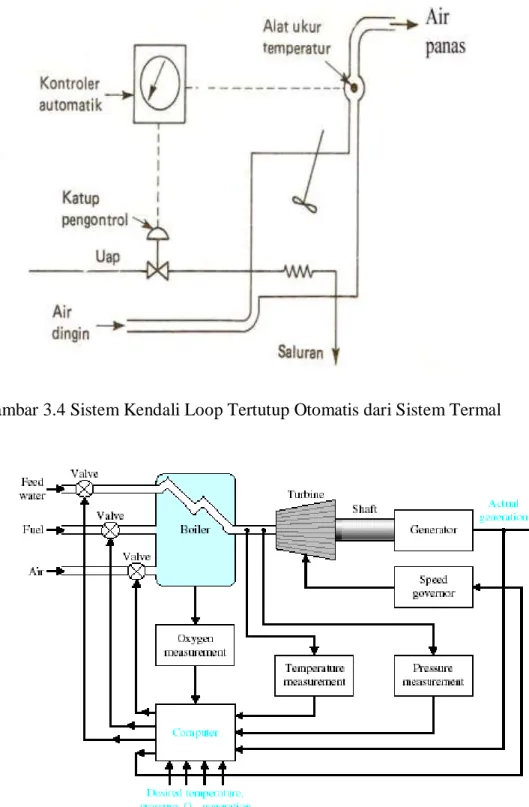
b. Sistem Kendali Loop Tertutup Otomatis dari Sistem Termal
Gambar 3.4 Sistem Kendali Loop Tertutup Otomatis dari Sistem Termal
Halaman 26
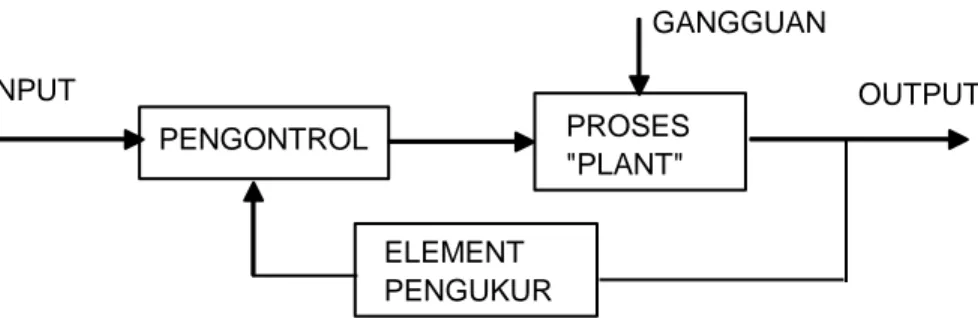
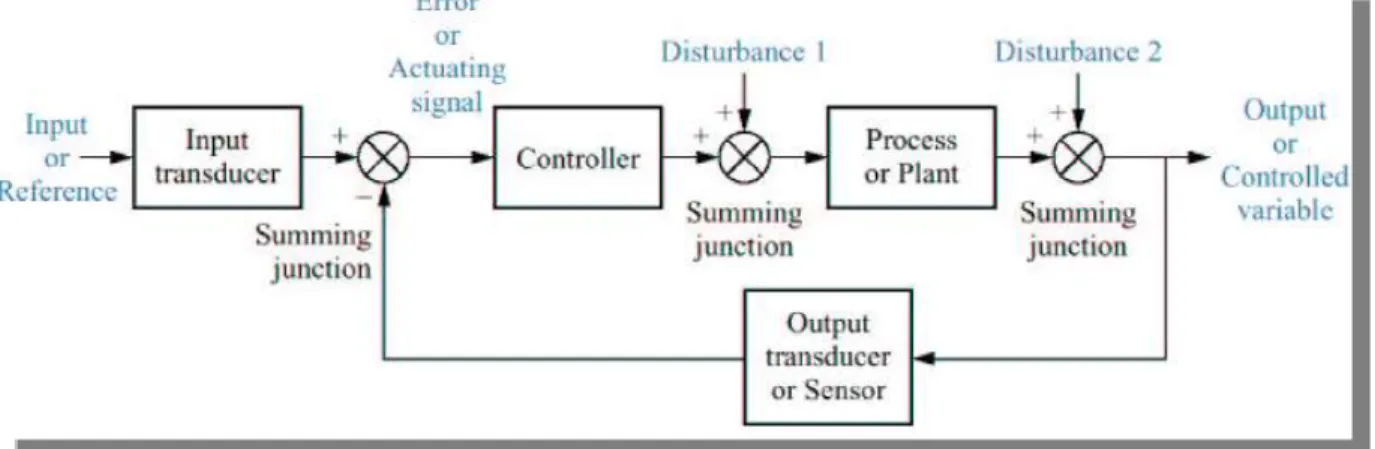
3.2. Secara Umum Sistem Kendali digambarkan dalam Blok Diagram :
Gambar 3.6. Blok Diagram Sistem Kendali
Input ( Masukkan ) : Rangsangan atau perangsangan yang diterapkan ke suatu system pengendalian dari sumber energi, biasanya agar
menghasilkan tanggapan tertentu dari system yang dikendalikan.
Output (keluaran) : Tanggapan sebenarnya yang diperoleh daari sebuah system
pengendalian.
Plant ( Proses ) : Seperangkat peralatan yang terdiri dari atau sebagian mesin
yang bekerja secara bersama-sama dan digunakan untuk suatu “ Proses”
Proses : Merupakan suatu bagian operasi atau perkembangan
alamiah, yang berlangsung secara kontinyu ( Continue ), yang ditandai oleh suatu deretan perubahan kecil yang berurutan, dengan cara yang relative tetap, untuk mendapatkan suatu ahkiran yang dikehendaki.
Gangguan : gangguan bila ada, memungkinkan suatu sinyal yang
cendearung mempunyai pengaruh yang merugiakan pada harga keluaran system.
Didalam analisis biasanya digambarkan sebagaimana diagram blok /kotak sbb: PROSES "PLANT" ELEMENT PENGUKUR PENGONTROL INPUT OUTPUT GANGGUAN
Halaman 27 BLOK DIAGRAM LENGKAP UNTUK SISTEM SEDERHANA :
Dimana :
R(s) = Input Laplace transform C(s) = Output Laplace transform
G(s) = Transfer function forword element H(s) = TF. Feedback element
E(s) = Error sinyal
G(s)H(s) = transfer function “open-loop” Transfer function “closed-loop” :
E(s) = R(s) – B(s) ……….. (1) B(s) = C(s) . H(s) ………. (2) C(s) = E(s) . G(s) ………..(3) 21 : E(s) = R(s) – C(s).H(s) ……..(4) 43 : C(s) = (R(s) – C(s).H(s)) G(s) C(s) + G(s)H(s)C(s) = G(s)R(s) G(s)H(s) 1 G(s) R(s) C(s) G(s ) H(s) R(s) E(s) C(s) +
-Halaman 28
Persolan-persoalan dalam system pengendalian
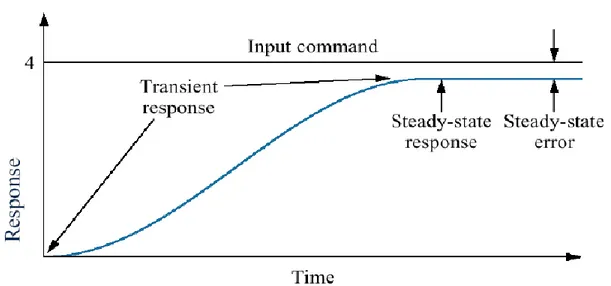
Persolan pokok dalam analisis sitem dalam sintesa sebuah system pengendalian anatara lain : 1. Waktu gejala peralihan ( Transient period ) : yaitu setiap system pengendalian/pengaturan
diharapkan mempunyaim transient time (waktu untuk gejala peralihan ) sekecil mungkin, artinya dapat proses sesingkat-singkatnya, sehingga harga keluarannya sesuai dengan yuang diinginkan. Tetapim dengan transient time yangkecil, keluaran dakan mempunyai simpangan dan atau osilasi yang besar dalam menuju harga yana lebih besar ( semakin meningkat ). 2. Waktu steady state ( setelah wahtu gejala peralihan dianggap selesai ), disini ada 2 hal yang
sangat penting yaitu:
a. Adanya kesalahan (steady state error ) ialah output yag sebenarnya tidak sama dengan output yang diinginkan.
b. Besarnya kesalahan steady state error dari kedua system tersebut sangat dipengaruhi oleh “ type system” dan macam “input”
3. Kestabilan : Yaitu menentukan apakah system itu mempunyai besaran-besaran (terutama outputnya ) dengan harga yang tidak membesar tak terkendali (contoh .gambar 3.9 Impulse response for various root location) untuk root yang letaknya dikanan sumbu Imajiner adalah tidak stabil.
Halaman 29
Gambar 3.8. Transient response
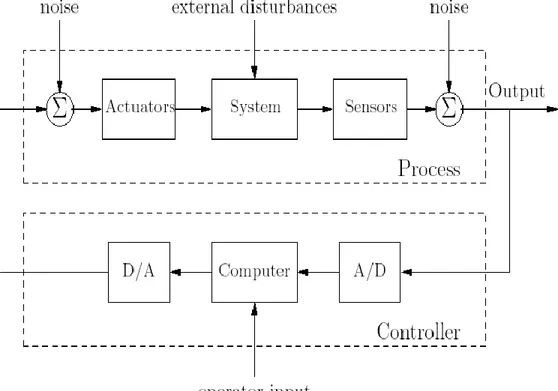
Halaman 30 Untuk mengatasi persoalan pokok dalam sistem pengendalian, yaitu kinerja transient, steady state time yang pendek, steady state error nol dan sistem yang stabil maka kontrol engineer perlu memodelkan sistem pengaturan dan merancang controller dengan baik.
Gambar 3.10. Modern feedback control system
Sistem pengaturam yang advamced akan memperhitungkan gangguan dari luar dan bagaiman merancang controller yang dapat membawa sistem keseluruhan berkinerja baik dan tahan terhadap noise / gangguan (robust design).
Halaman 31 Dengan berkembangnya teknologi komputer & VLSI maka applikasi komputer sebagai
controller menjadi sangat membantu untuk mengatasi Persolan-persoalan dalam system
pengendalian.
Salah satu sistem piranti keras komputer yang dirancang untuk sistem otomasi dalam industri adalah PLC (Programmable Logic Control).