ANALYSIS OF TWO TRIANGLE-BASED MULTI-SURFACE REGISTRATION
ALGORITHMS OF IRREGULAR POINT CLOUDS
M. Al-Durgham a,*, I. Detchev b, A. Habib b a
Dept. of Civil Engineering, University of Toronto, 35 St. George Street, Toronto, ON, M5S 1A4, Canada -
[email protected]
b
Dept. of Geomatics Engineering, University of Calgary, 2500 University Drive, Calgary, AB, T2N 1N4, Canada -
(i.detchev, ahabib)@ucalgary.ca
Commission V, WG V/3
KEY WORDS: LiDAR, Surface Registration, Iterative Closest Patch (ICPatch), Iterative Closest Projected Point (ICPP)
ABSTRACT:
The registration of multiple surface point clouds into a common reference frame is a well addressed topic, and the Iterative Closest Point (ICP) is - perhaps - the most used method when registering laser scans due to their irregular nature. In this paper, we examine the proposed Iterative Closest Projected Point (ICPP) algorithm for the simultaneous registration of multiple point clouds. First, a point to triangular patch (i.e. closest three points) match is established by checking if the point falls within the triangular dipyramid, which has the three triangular patch points as a base and a user-chosen normal distance as the height to establish the two peaks. Then, the point is projected onto the patch surface, and its projection is then used as a match for the original point. It is also shown through empirical experimentation that the Delaunay triangles are not a requirement for establishing matches. In fact, Delaunay triangles in some scenarios may force blunders into the final solution, while using the closest three points leads to avoiding some undesired erroneous points. In addition, we review the algorithm by which the ICPP is inspired, namely, the Iterative Closest Patch (ICPatch); where conjugate point-patch pairs are extracted in the overlapping surface areas, and the transformation parameters between all neighbouring surfaces are estimated in a pairwise manner. Then, using the conjugate point-patch pairs, and applying the transformation parameters from the pairwise registration as initial approximations, the final surface transformation parameters are solved for simultaneously. Finally, we evaluate the assumptions made and examine the performance of the new algorithm against the ICPatch.
1. INTRODUCTION
There currently exist many ICP variants, which have various target functions and objectives. Rusinkiewicz & Levoy (2001), Bae & Lichti (2008), and Besl & McKay (1992) are a few examples of these variants. ICP like matching algorithms vary in the way their primitives are defined. The basic matching algorithms are mainly comprised of a point-to-point matching procedure; this method is sometimes desired due to the lack of pre-processing steps, the high convergence rate, and the speed of the algorithm. An example of such level could be found in the earliest work shown in Besl & McKay (1992). However, note that due to the false underlying assumption of point-to-point correspondence in the case of irregular point-to-point clouds, the final transformations may be slightly biased (Shan & Toth, 2008).
Another representation of primitives is found where one point cloud is maintained in its original shape, while the other point set is converted into a higher order primitive (e.g., triangles, planes, surface normals, and higher order surfaces). In this representation, the mathematical model used is more complex and the expected execution time is longer; however, the expected surface registration accuracy is higher. Beinat et al. (2006), and Boström et al. (2008) are two examples of this type of primitive representation.
An even more complex representation is to use object primitives. An example for the use of such primitives is found in Rabbani et al. (2007). In their work, point clouds are first
segmented in order to extract useful objects (e.g., cylinders). Afterwards, a model fitting step takes place, followed by a correspondence specification step. Then, a check is performed to ensure that the information collected so far provide sufficient constraints. Finally, the sum of the squares of the orthogonal distances between the points and the extracted object are minimized, and the optimal registration is achieved.
In the aforementioned brief literature review, the authors do not attempt to review all the existing matching algorithms, but to shed light on the three levels of primitive variation: (1) point-to-point, (2) point-to-surface, and (3) point-to-object primitives. In the work presented here, both, the ICPatch and the ICPP belong to the second category of algorithms. However, the ICPP could also be seen as a first category algorithm due to the introduction of artificial projected points used for the registration as will be seen in the methodology section.
The focus of this paper is to present and compare two triangular patch based registration methods, namely - the Iterative Closest Patch (ICPatch) and the Iterative Closest Projected Point (ICPP). In the previous work shown in Habib et al. (2010), the authors introduced the ICPatch method for the registration of multiple point clouds into a common reference frame. The ICPatch method could be summarized in two main steps. First, a pairwise registration is run between every two overlapping point clouds in order to solve for their relative transformation parameters. Note that for each point cloud pair a Delaunay triangulation must be performed over one of the two point
clouds, while possible point within the data with the relati registration ste parameters of surface registr Inhere, the IC one-step (mu presented, sta mathematical the performan then conclude work.
In this section method, then, behind both m correspondenc an invalid assu points among higher order p the data. Tria primitive areal 2.1 The Itera This algorithm please refer to is run between solve for their point-to-patch parameters fro compute the cloud; the foll steps. 2.1.1 Pairw Given two o performed ove triangle primi
, ,
triangle , as shown in F based Triangu acceptable pri represents the or the scene of surface model triangles are b true, then it ca between the o 1). In order to the physical s threshold is im undesired tria triangular-pris assume that p triangular patc then this point proper initial t
′ and the tria target function
the other one t-to-closest tria aset. Second, t ive transformat ep are used to f each point cl ation process in Patch method i ulti-surface) r arting with the
model. Next, a nce of the afore ed with final re
2. MET
n, we first start we present the methods is th ce between two umption. The us g the point set primitives to com
angles are con l features. ative Closest P m has two main
Habib et al. (2 n every two ov r relative transf matches togeth om the pairwi global transfor lowing subsect
wise surface regi overlapping pa er one point set itives, while m
, in its origi
, in are
Figure 1. It is im ulated Irregular imitive only in true physical s f interest (Habi ls have to have built across wh an be assumed overlapping surf deal with cases surface (e.g. sp mplemented in angles from be
m looking sea point in surf ch with vertices t should coincid transformation angle vertices co
n is to minim
is kept in its o angular patch the point-to-pat tion parameters compute the gl oud, and thus n a network mo
is briefly review registration IC
underlying as a sample dataset ementioned me emarks and a d
THODOLOGY by quickly rev new ICPP meth e argument th o or more irreg ser simply cann ts. Therefore, mpensate for th nsidered since
Patch
n steps (for com 2010)). First, a p verlapping poin
formation param her with the rel ise registration rmation parame tions elaborate
istration airs, a Delaun
, ,
maintaining the inal form. The e transformed in mportant to not r Network (TI n the cases wh surface of the r ib et al., 2010). point density h hat would be a
that point-to-pa face models do s where the TIN parse areas in t n the matching eing used (thu arch space). S face one ( S ) s V, V, and V de with the patc
parameters. Th omprise a tetrah mize this tetrah
original format pairs are iden tch matches tog s from the pair lobal transform perform the m de.
wed. Then, the CPP algorithm
ssumptions and t is used to eva ethods. The pap discussion of f
Y
viewing the ICP hod. The motiv hat a point-to-gular point clou not identify com one must con he discrete natu they are the
mprehensive de pairwise registr nt clouds in ord meters. Second ative transform n step are use eters of each more on these
nay triangulatio to establis e other point c point in a nto a common f te that the Dela IN) patches ar hen the TIN m
reconstructed o This means tha high enough th
breakline. If th atch correspond oes exist (see F
N does not repr the point cloud strategy to pre us resulting in So, if it is saf corresponds to in surface two ch after applyin he transformed hedron volume hedron volume
t. All ntified gether rwise mation
multi-e nmulti-ew m is
d the aluate per is future
Patch vation -point uds is mmon nsider ure of most
etails, ration der to d, the mation ed to object at the hat no his is dence Figure resent ds), a
native way to e h pair is achiev
squares adjustm e direction para he patch could hing process. R t the weight con
(a re 1: Surface accepting primitive Multi-surfa way of achievin ence frame of
and then to se els in the pairw and the last su to errors prop ess. This will eying, where t cide, has not be
multiple-surfa ltaneously, i.e. ed as an ex cular, the pai mulate a list o mate the trans lapping surface he other hand, applies the tran ace registration e for all the fina in a least-sq tively transform
of the squared t-patch pairs inear, so that wise surface reg ote that the trans els are kept fixe ace model.
The Iterative C us first consider nd point cloud ence frame of case, the tran wing form:
stablish the sim ved by modifyi ment. Basically allel to the patc d be used as Refer to Habib
nstraints.
a)
model represe g correspond es (b) (Habib et ace registration ng multi-surfac one of the sur equentially reg wise manner de urface models m pagated through
be similar to the constraint t een used. To av ce registration in a network m tension to th irwise registra of the correspo sformation par e models. The uses these corr nsformation pa as initial appr al surface transf quares adjustm med to a comm d normal dista is minimized. is why the in gistration are n sformation para ed in order to d
Closest Project r a pairwise reg
d ,
the first point sformation ma
milarity measure ing the weight y, the weight ma ch surface. Hen
a conjugate f et al. (2010) fo
entation (a), an dence betwee
t al., 2010)
ce registration is rface models as gister the rest o
scribed before. might exhibit i h the sequenti o a closed-loo that the first a void such an in n has to b mode. This pro he pairwise re tion procedure onding point-pa rameters betwe multiple-surfac responding poin arameters from roximates, to s formation param ment, where ea
mon reference f ances between
This procedu nitial approxim necessary. It is ameters for one define the datum
ted Point gistration scena
, is transf cloud athematical mo
e for the point-matrix in the atrix is relaxed nce, any vertex feature in the or more details
(b)
nd criteria for en conjugate
s to choose the s the common of the surface However, the ncompatibility al registration op traverse in
and last point ncompatibility, be performed ocedure can be
egistration. In e is used to atch pairs and een any two ce registration,
nt-patch pairs, the pairwise simultaneously
meters. This is ach surface is frame until the
the conjugate ure is highly mates from the also important e of the surface m for the final
ario, where the formed to the
, , . In odel takes the
(1)
where
and when regi the relationship
where
This formulati elements into t
Equation (3), e two conjugate searching for must be tr using the initia
where
Next, one find these three po Note that the Delaunay trian be beneficial a result in undes (b), thus leadi cases. On the finding the cl points falling b
Figure 2: Side nea De A tetrahedron validity of the space threshol
of , completing a possible direc resulting in tw
, or a tria either tetrahe
V , , ,
Search o
, is the tran , is the rota istering and p takes the follo
, is the trans predefine , is the rotat predefine , is the trans predefine , is the rotat predefine ion could be r the right side of
establishes the points in the af a match betwe ansformed to th al approximatio
is the tran is trans ds the closest th ints establish th ese three point
ngle. In fact, av as shown in Fi sired triangles i ing to incorrec e other hand, losest three poi beyond a certain
(a)
e view example arest neighbou elaunay triangle search space i e matched pair ld with a value
, by to tetrahedron. I ctions for the wo tetrahedron angular dipyram edron, the m
, ; where Acc origin
nslation vector b ation matrix bet d onto a p owing shape:
slation vector b ed reference fram
tion matrix betw ed reference fram slation vector b ed reference fram
tion matrix betw ed reference fram rearranged by t
f the equation:
mathematical r forementioned p
en the two clo he point cloud ons provided:
nspose of sformed to the hree points ,
he triangular ba ts do not nece voiding the Del gure 2. For exa in the dataset a ct point-to-patc using the nea ints completely n threshold as s
e of a blunder urs (a) and inc
s (b) for the sam is then establis
r & , ,
of , one can point usin In fact, note e extrusion of
ns , , ,
mid. Since poi matching condi
V … is the co ceptable point
between and tween and
redefined refer
etween and me
ween and a me
etween and me
ween and a me
transforming al
relationship bet point clouds. B uds, a point (
reference f
reference fra
, in t
ase of a tetrahe essarily constru
launay triangle ample, blunder s shown in Fig ch matches in arest neighbou y ignores erron shown Figure 2
(b)
ignored when u cluded when u me point set shed to examin
. Given a se extrude the cen ng equation (5), that there are f centroid , , and ( , int could fa ition becomes onvex volume o
Outlier d
rence,
(2) d a
d a
ll the
(3) ween Before ) in frame
(4)
ame. to ,
dron. uct a
s can s can gure 2 some ur for
neous (a).
using using
ne the earch ntroid , thus two
thus
, ,
all in
∈
of the shape of th accep
wher
Figur
The u to u interp point be. F while space
Figur
Using split name
,
Figur M R
e specified by th he resulting te pted if ∈ V
re , ,
, , ,
re 3: The resu matched underlying prin sing constant polation scenar ts to the vertice Figure 4(a) show
e Figure 4(b) is e proposed.
(a)
re 4: A consta space (b) g the point ,
into four diff ely - , ,
, , .
re 5: Four tetra volume w Matched point Reference point
he given vertice etrahedrons. T
, , ,
= √
, are the Carte
, are the plan
,
ulting tetrahedr point nciple behind u
normal distan rio. In other w s, the smaller th ws a 2D cartoo s a 2D represen
ant search spac )
the tetrahedron ferent tetrahedr
, , , ,
ahedrons resulti with
Unm set Searc
es. Figure 3 dem The set &
or ∈ dipyram
esian coordinate ne parameters
ron , , ,
using tetrahedro nce is to mim ords, the close he matching thr on of a constant ntation of the m
(b)
e (a) and the r
n shown in Figu rons as shown
, , ,
ng from splittin matched point
ch space
monstrates one
, , is
mid.
(5)
es of a point derived from
, , and the
ons as opposed mic a realistic
er the matched reshold should t search space, modified search
)
revised search
ure 3 could be n in Figure 5;
, , , and
ng the original
Next, one cou examining the tetrahedron as Eq. (7) indicat point fall w is inside the te the same deter & Eberly, 200
where, to
The projection
, , ,
where
Finally, the po point pair betw the case where a collection of conventional I clouds into a possible match used at once Equation (9) g left side of the is used to co unknowns. No and nonlinear using this form one should be lead to gimba Euler rotations
Due to the str dipyramid sear rate of the IC speed up the a
uld evaluate if e signs of the suggested in E te the side (i.e., with respect to t etrahedron only rminant sign) o 2).
are the follow
,
,
n of into the is given by:
=
, , , are t
, ,
oint and its p ween the two ir e more than two f points and the ICP algorithm c a common ref
hes between th e to solve for gives the basis e equation is the
nstruct the Jac ote that, both, r least squares mulation (Voss aware of possib al lock scenario s.
rict condition p rch space), one CPP. Thus, the
lignment of the
falls inside determinants r Eq. (6). The sign , negative or po the tetrahedron y if it falls on th of the tetrahedr
wing determina
plane describe
the plane param
projection co rregular point c o surfaces exist, eir matching pr could be used ference frame. he point clouds
r the transfor s of our problem
e observations, cobian matrix
Horn's method with Euler an selman & Maa ble point cloud os (Shoemake,
roposed in this e could expect a following step e point clouds:
e the tetrahedro resulting from ns of determinan ositive) at whic
faces. The poi he same side (ha
ron faces (Schn
ants:
ed by the param
meters derived
onstitute an acc clouds. Similar , one could esta rojections. Then to register the
Note that al are considered rmation param
m formulation. while the right with respect to d using quatern ngles could be as, 2010). How rotations that m 1985) when u
s algorithm (i.e a lower converg ps are suggeste
on by each nts in ch the
int aving neider
(6)
(7)
meters
(8)
from
curate ly, in ablish n, the point l the d and
eters. . The t side o the nions
used wever, might using
(9) ., the gence ed to
1.
2.
3.
The I tested appro 40 cm consi torso point syste Figur proce textu The r sub-m avera 30%. cloud globa were of th that and r
Po nu
Table
Random sampl points) is used individual iter converging into A conventiona iterations with The ICPP is pe iterations to fin the final solutio
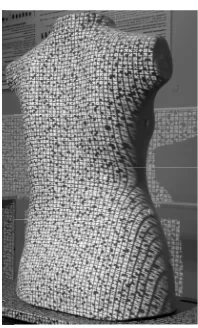
ICPP method fo d using a data oximate dimens m, and 25 cm isted of four po surface (i.e. th t clouds were d
m having multi re 6 shows the ess. The patter ure in order to resulting X, Y, millimetre prec age overlap betw
. Table 1 show d, together with al transformatio
derived by rou e central came was used as rotational param oint set
umber No. poin (ref.) 20,9
17,22 21,87 17,83 e 1: Transforma initial po
Figure 6: Th
ling of one of th d for two purp ration, and (b)
o local minima. al ICP method relaxed parame erformed using ne tune the tra on.
3. DATA U
for performing m aset of a scol sions of the tor m in height, wi int clouds mod he front, the ba derived using ph iple cameras an
torso mannequ rn projected w allow for the , Z coordinates cision (approx ween the neigh ws the number h the required i on parameters. ughly evaluating
ra used in the s the reference meters are zeros
of nts
15 0 0 22 0 300 78 0 600 33 0 300 ation parameter oint cloud alignm
he torso model u
he datasets (usi poses: (a) to s ) to reduce th .
is performed in eters.
all the points in ansformation p
USED multi-surface re liotic torso ma rso mannequin idth, and depth elling four parti ack, and the tw hotogrammetric nd projectors (D uin during the d was used to cr automatic matc for the four po ximately 0.3 hbouring cloud
of points gene initial approxim . The initial a g the position a point cloud ge
point set, so it .
°
0 0 0 -300 90 0 0 180 0 300 270 r approximation ment
used (Detchev,
ing 10% of the speed up each he chances of
n the first few
n the last a few arameters into
egistration was annequin. The
were: 60 cm, h. The dataset ial areas of the wo sides). The c means with a Detchev, 2010). data collection reate artificial ching process. oint clouds had ) and the ds was roughly erated for each mations for the approximations and orientation
neration. Note ts translational
° °
0 0 0 0 0 0 0 0 ns used for the
2010).
4 In this sectio applied over approximation side views of t approximation process to star
Figure 7: Side bef Table 2(a) a parameters res The transform discrepancy of to 3' of angula
-26.42 ±0.009 -11.07 ±0.012 15.12 ±0.014
-26.47 ±0.027 -11.31 ±0.029 15.06 ±0.024 Table 2: Final the
4. RESULTS n, the ICPP a r the dataset ns provided. T
the torso mode ns used provide rt successfully.
e (a) and top (b fore performing nd Table 2(b sulting from th mation paramete
f up to 0.24 ar variation.
291.44 ±0.020
-26 ±0 557.08 ±0.019
2 ±0 267.57 ±0.035
29 ±0
291.52 ±0.043
-265 ±0 556.91 ±0.031
26 ±0 267.36 ±0.053
290 ±0 l transformation e ICPatch (b) alg
AND DISCUS and the ICPatc t described he following g l before the adj e minimal overl
(a)
(b)
b) views of the g the ICPP
) show the f he ICPP and th ers are compara in the transla
°
5.04 .016
89.846 ±0.0046 6.59
.023
180.062 ±0.0034 0.58
.015
270.067 ±0.0046 (a)
°
5.08 .024
89.858 ±0.0070 6.93
.049
180.111 ±0.0080 0.71
.028
270.089 ±0.0090 (b)
n parameters fo gorithms
SSION ch algorithms
using the i graph shows top
justment. The i lap for the matc
e Torso point cl
final transform he ICPatch meth
able, with maxi ation vectors, an
°
-2.830 ±0.0017
-5 ±0. -8.365 ±0.0023
-2 ±0. -5.526 ±0.0017
2 ±0.
°
-2.816 ±0.0040
-5 ±0. -8.362 ±0.0040
-2 ±0. -5.544 ±0.0030
2 ±0. or the ICPP (a)
were initial p and initial ching
louds
mation hods. imum nd up
°
5.560 0017 2.670 0017 2.858 0017
°
5.543 0030 2.688 0040 2.876 0030 ) and
One to ex rotati the IC the a stand case attrib
Figur
A mo by co Squa trans show point point accur
Table
A sys subtr are e conju differ funct numb triang triang
should also em xisting correlati ion angles. For CPP is observed above paramete dard deviations are double the buted to the mor
re 8: Side (a) a after per ore practical app omparing the re are Error (RMSE
formed point c wn in Table 3. A
t clouds after ru t sets coincide w racy range of bo
0.147 0.156 0.131 e 3: RMSE of
registrati stematic trend c racted from each evaluated betw ugate point in
rence could be tions between ber of matches gles found in gles in the ICP
mphasize that th ons between th r example, the
d between an rs in the ICPat
of the estimate values of thos re relaxed searc
(a)
(b) and top (b) view
forming the ICP proach to comp esulting adjuste E) of the coord clouds from bo Also, side (a) a unning the ICPP
within 0.25 oth solutions.
0.091 0.106 0.056 f the transform ion procedures can be observed h other. Basical ween a point i n the ICPatc attributed to: ( the two metho s and their na the ICPatch v PP), and (3) th
hese changes ar he translation v largest correlat nd of , and tch. In addition ed parameters i se in the ICPP. ch space in the I
ws of the Torso PP
pare both metho ed point sets. T dinate difference oth registration and top (b) view P are shown in
RMSE, which
0.128 0.135 0.054 med point clou
d when the two lly, the coordin in the ICPP r h results. Th 1) the differenc ods, (2) the va ature (i.e., 26, vs. 9,958 near he shape of the
re justified due vectors and the tion of 86% in d 90% between n, note that the in the ICPatch This could be ICPatch.
o point clouds
ods is achieved The Root Mean es between the procedures is ws of the torso Figure 8. Both h is within the
0.215 0.232 0.152 uds from both
o point sets are ate differences results and its his systematic
ce in the target ariance in the 147 Delaunay rest neighbour e search space
(i.e., triangul conclusions w reported varia remained with
Figure 9: Top coo poi In Table 4, ICPatch and t used, the targe surface registr Comparison
Primitives Target function Registration Matching spac Triangles used Established matches Convergence rate
Table 4: Com alg
This paper pr surface registr Iterative Close compared agai performance, n were found to The main caus space definitio ICPP uses the Although the favoured over possible mism Voronoi cells. is used in the search space. Future work w for automated
ar prism vs. were also verifie
ances were o hin the surface r
p view of the ordinate differe int clouds from we present th the ICPP algor et function, the
ation scenario, ICPatch (c vs. modifi point to pat point to poi n minimize v normal dist two step ce triangular p d Delaunay
more match (26,147 pai fast, as a re pairwise ste mparison betw gorithms
5. CONCLU
resented a new ration of overl est Projected Po inst the ICPatch number of matc
agree within th se of variation i on. While the IC e closest three closest three r Delaunay tria matches, and eli In addition, a e ICPP while t
will focus on e estimation of th
a triangular ed via simulatio observed and
roughness range
torso, colour c ences ( ) b both registratio he main differ rithms in term number of step and other prope coplanarity
ed weight) prism tria
clo ween the ICPa
UDING REMA w approach for lapping point c oint (ICPP). In a h algorithm in ches established he range of the d is related to the CPatch uses De
points for the points yield angles as it red iminates the ne
triangular dipy the ICPatch us
evaluating the l he normal dista
dipyramid). T ons, where the
in all cases, e.
coded to reflec between regene on procedures rences between ms of the primi ps needed in a m
erties. ICPP
int to point inimize normal stance
e step angular dipyram osest three poin ss matches ,958 pairs)
ghtly slower, du pyramid check atch and the
ARKS
r performing m clouds, namely addition, the IC terms of primit d, etc. Both met data noise (0.3 e triangle and se
launay triangle triangle defin less matches, duces the numb eed for constru yramid search s ses triangular p
local point accu ance threshold. M
These same they
ct the erated
n the itives multi-nition. it is ber of ucting space
sets with varyin mined.
A authors are gra ivil Engineering k. Also, sincere
ect: PIV_SII72 ect Grants for th
K. & Lichti, D norganised poin Remote Sensing
at, A., Crosi phological Pre phological Pre nal of Photogra
, P. & McKay, es. Institute of E sactions on Pa ), pp.145-55. röm, G., Gonça
Fusion usi ogrammetry an
hev, I., 2010 ogrammetric Sy o. Calgary: UCG
b, A., Detchev ysis of Two Ap rregular Point ogrammetry, R XVIII(Part 1).
b, A., Kersting, hodologies for AR Strips. IEEE ing, 48(1), pp.2
bani, T., Dijkm ntegrated appro t clouds. ISPRS ing, 61(6), pp.3
nkiewicz, S. & Algorithm. In 3 neider, P. & puter Graphics
n, J. & Toth, C ning: Principle
emake, K., 19 es. ACM SIGGr selman, G. & M
r Scanning. 1st
ng overlap and
ACKNOWLED ateful to Prof. B
g, University o e thanks go to
2) and NSER heir financial su REFEREN
., 2008. A meth nt clouds. ISPRS g, 63(1), pp.36-5
lla, F. & Se alignment and e-Alignment a ammetry and Re
N., 1992. A m Elecrical and E attern Analysis
alves, J. & Sequ ing Error-bou nd Remote Sensi
0. Implementa System for 3D R GE Report 203 v, I. & Bang, pproaches for M t Clouds. Inte Remote Sensing
, A., Bang, K.I. the Internal E Transactions 221-36. man, S., Heuvel,
oach for modell S Journal of P
55-70. Levoy, M., 20 3-D Digital Ima
Eberly, D., 2 . 1st ed. San Fr C., 2008. Topo es and Processin
985. Animating raph, 19(3), pp.
Maas, H.-G., 20 ed. CRC Press
d point density
DGEMENT Brenda McCab of Toronto for s the GEOIDE RC Discovery upport of this re NCES
hod for automat S Journal of Ph 54.
epic, F., 200 d Global Hybr and Global H emote Sensing,
method for regis Electronics Eng s and Machine
ueira, V., 2008. unds. ISPRS ing, 63(1), pp.5
ation of a Reconstruction
16.
, K., 2010. A Multiple-Surfac ernational Arc g and Spatial
& Lee, D., 201 Quality Contro s on Geoscienc
, F. & Vosselm ling and global Photogrammetry
001. Efficient V aging and Mode
2002. Geometr rancisco: Morga ographic Laser ng. 1st ed. CRC
g rotation wi .245-54. 010. Airborne a
. pp. 83-85.
y will also be
be, Department supporting this NCE network and Strategic esearch.
ted registration hotogrammetry
06. Automatic rid Automatic Hybrid. ISPRS
36(5). Online. stration of 3-D gineers (IEEE) e Intelligence,
Controlled 3D Journal of 55-67.
Close Range of a Scoliotic
A Comparative ce Registration chives of the l Information,
10. Alternative ol of Parallel ce and Remote
man, G., 2007. registration of ry and Remote
Variants of the eling., 2001.
ric Tools for an Kaufmann. r Ranging and C Press.
ith quaternion
and Terrestrial f