i PROSIDING SEMIRATA 2017 BIDANG MIPA BKS-PTN WILAYAH BARAT
Editor: Maison
Feri Tiona Pasaribu Ahmad Syarkowi Evtita
Novferma
Rosi Widia Asiani Aulia Ul Millah Martina Asti Rahayu
Reviewer: Maison
Evita Anggereini Haris Effendi Desain Sampul: Taufan Dyusanda Putra ISBN: 978-602-50593-0-8 Penerbit:
Fakultas Keguruan dan Ilmu Pendidikan (FKIP)
bekerjasama dengan Fakultas Sains dan Teknologi (FST) Universitas Jambi Redaksi:
Kampus Unja Mendalo
Jl. Raya Jambi – Ma. Bulian Km. 15, Mendalo Indah Jambi
ii KATA PENGANTAR
Assalamualaikum Wr. Wb.
Alhamdulillah, segala puji bagi Allah SWT, Tuhan Yang Maha Esa, atas karunia yang telah dilimpahkan sehingga kegiatan Seminar dan Rapat Tahunan (SEMIRATA)-BKS PTN Bidang MIPA Wilayah Barat tahun 2017 dapat dilaksanakan secara baik.
Kegiatan SEMIRATA-BKS PTN Bidang MIPA Wilayah Barat tahun 2017 yang diamanahkan kepada Universitas Jambi sebagai penyelenggara dilaksanakan secara gabungan oleh Fakultas Sains dan Teknologi (FST) dan Fakultas Keguruan dan Ilmu Pendidikan (FKIP). Kegiatan telah dilaksanakan dengan sukses pada tanggal 12-14 Mei 2017 di Ratu Conference Hotel dan Swiss Bellin Hotel Jambi. Salah satu program utama adalah Seminar Nasional Sains dan Pendidikan MIPA dengan tema: “Peran Sains Teknologi dan Pendidikan MIPA dalam Menopang Sainspark, Teknopark serta Geopark berbasis Agroindustri dan Lingkungan”.
Sesi pleno seminar di Ratu Conference Center dipaparkan materi oleh dua pembicara utama yaitu akademisi Dr. Ir Yunus Kusumahbrata, M.Sc (Staf Ahli Kementerian ESDM) dan praktisi/birokrat Dr. H. Syahrial, M.P., (Bupati Tajung Jabung Barat Prov. Jambi). Materi yang disajikan berisi topik Pengembangan Geopark, Teknopark dan Sainspark di Indonesia. Selain daripada itu, sesi paralel telah dipresentasikan secara oral lebih dari 600 judul makalah hasil penelitian yang disampaikan dalam 40 ruang seminar secara paralel. Dalam kegiatan komunikasi ilmiah secara langsung ini juga telah dimanfaatkan untuk menjalin jejaring agar lebih bersinergi dalam pengembangan Sains dan Pendidikan MIPA ke masa mendatang.
Supaya komunikasi ilmiah yang baik ini dapat juga tersampaikan ke komunitas ilmiah lain yang tidak dapat hadir pada kegiatan seminar, panitia memfasilitasi untuk menerbitkan makalah dalam bentuk Prosiding. Panitia juga tetap memberi kesempatan kepada peserta yang akan menerbitkan makalahnya di jurnal ilmiah, sehingga tidak seluruh materi yang disampaikan pada seminar diterbitkan dalam prosiding ini. Dalam proses penerbitan prosiding ini, panitia telah banyak dibantu oleh Tim Reviewer dan Tim Editor yang dikoordinir oleh Drs. Maison, M.Si., Ph.D, yang telah dengan sangat intensif mencurahkan waktu, tenaga dan pikiran untuk melakukan proses plagiarism check, review, dan editing. Untuk itu, panitia menyampaikan terima kasih dan penghargaan. Namun, panitia juga menyampaikan permohonan ma’af karena dengan sangat banyaknya makalah yang akan diterbitkan dalam prosiding ini, waktu yang dibutuhkan dalam proses penerbitan prosiding ini cukup lama, dan penerbitan prosiding tidak dilakukan dalam satu buku tetapi dalam empat buku prosiding. Semoga penerbitan prosiding ini selain SEMIRATA-BKS PTN Bidang MIPA Wilayah Barat tahun 2017 bermanfaat bagi para pemakalah dan penulis, juga dapat bermanfaat dalam pengembangan Sains dan Pendidikan MIPA di Indonesia.
Ucapan terima kasih disampaikan kepada Rektor Universitas Jambi, Dekan FST dan FKIP Universitas Jambi, Ketua Forum Rektor BKS wilayah Barat, Ketua BKS-MIPA Wilayah Barat, panitia dan semua pihak yang ikut menyukseskan acara semirata.
Jambi, 2 Oktober 2017 Ketua Panitia
i DAFTAR ISI
Hal BUKU 1 (MATEMATIKA)
IMPLEMENTASI ALGORITMA GENETIKA SISTEM PENJADWALAN REGISTRASI DINAMIS
1 Suyanto, Syahriol Sitorus dan Usman Ridwan Syah
APLIKASI SISTEM ANTRIAN BERBASIS ANDROID 10
Joko Risanto
MODEL OPTIMASI LAHAN PARKIR GRAPARI BANDA ACEH DENGAN MENGGUNAKAN SATUAN RUANG PARKIR
17 Phounna Mandira Chalandri, Intan Syahrini, Taufiq Iskandar, Marwan Ramli
PENENTUAN LINTASAN TERPENDEK PADA SUATU GRAP BERBOBOT DENGAN MENGGUNAKAN PROGRAM DINAMIK
29 Eldawati, Said Munzir, Marwan Ramli
PREDIKSI HARGA DAGING SAPI DI PEKANBARU DENGAN METODE PEMULUSAN EKSPONENSIAL TRIPEL WINTER
41 Evi Febriantikasari1, Rado Yendra1, Arisman Adnan1, Rahmadeni2
PREMI TAHUNAN ASURANSI JIWA BERJANGKA DENGAN ASUMSI SERAGAM UNTUK STATUS GABUNGAN
51 Desta Wahyuni 1, Rado Yendra1, Arisman Adnan1, Nilwan Andiraja2
OPERATOR LINEAR PADA RUANG BARISAN TERBATAS l2 59
Muslim Ansori, Suharsono,S
APLIKASI KONTROL OPTIMAL PADA POLAR ROBOT UNTUK OBJEKTIF GANDA: MEMINIMUMKAN BESAR TORSI DAN PENCAPAIAN POSISI TARGET DENGAN WAKTU MINIMUM
64
Said Munzir, Marwan, Taufiq Iskandar dan Reza Wafdan
PENGGUNAAN METODE FIS MAMDANI DALAM MEMPERKIRAKAN TERJADINYA GELOMBANG TSUNAMI AKIBAT GEMPA BUMI
73 Hizir Sofyan 1, Erni Lusiani 2, Asep Rusyana 3, Marzuki 4
OPTIMALISASI PORTOFOLIO DENGAN MENGGUNAKAN SEPARABLE PROGRAMMING
80 Elly Rosmaini dan Nurhalimah Pane
MODEL MATEMATIKA PENYEBARAN PENYAKIT MALARIA 89
Syarifah Meurah Yuni, Mahmudi
ANALISIS PERSONAL FINANCIAL LITERACY MAHASISWA DALAM MERAMALKAN JUMLAH PENGELUARAN MENGGUNAKAN METODE
EXPONENTIAL SMOOTHING DAN P-SPLINE FILTER SMOOTHING (Studi Kasus : Universitas Syiah Kuala, Banda Aceh)
95
ii PERBANDINGAN ESTIMASI PARAMETER PADA DISTRIBUSI EKSPONENSIAL
DENGAN MENGGUNAKAN METODE MAKSIMUM LIKELIHOOD DAN METODE BAYESIAN
105
Elsa Tria Noviadi , Rado Yendra dan Arisman Adnan
PEMODELAN DEPENDENSI DATA KATAGORI MELALUI PENDEKATAN MODEL LOG- LINIER
112 Awal Isgiyanto, Syahrul Akbar
APPLICATION OF FOURIER SMOOTHING BASIS FOR 124
Reza Ariska, Miftahuddin
PENERAPAN ALGORITMA DYNAMIC PROGRAMMING PADA PERMASALAHAN KNAPSACK 0-1
134 Irmeilyana, Putra Bahtera Jaya Bangun, Dian Pratamawati, Winda Herfia Septiani
KETERKAITAN KETAKSAMAAN NILAI SINGULAR PADA PEMETAAN LINIER 145 Rolan Pane, Asli Sirait, Aziskhan
IMPLEMENTASI ALGORITMA BRUDY DALAM PERSOALAN KNAPSACK 0-1 DI UD. SUBUR TANI MAKMUR
154 Indrawati , Sisca Octarina, Esrawati
PENGOPTIMALAN RUTE PENGANGKUTAN SAMPAH DENGAN
MENGGUNAKAN ALGORITMA DIJKTRA (STUDI KASUS PENGANGKUTAN SAMPAH DI KOTA BANDA ACEH)
164
Nurmaulidar, Radhiah, Muhammad Reza Pahlefi
ANALISIS MODEL INDEKS HARGA SAHAM DENGAN METODE REGRESI DATA PANEL
171 Idhia Sriliana, Herlin Fransiska
SISTEM PENGENDALIAN DAN MONITORING SUHU PADA PIPA MINYAK MENGGUNAKAN SMS GATEWAY
179 Alfirman, M.Kom, Fatayat,M.Kom
PENAKSIR BAYES UNTUK PARAMETER DISTRIBUSI EKSPONENSIAL BERDASARKAN FUNGSI KERUGIAN KUADRATIK DAN FUNGSI KERUGIAN ENTROPI
185
Bustami , Harison , Nadya Zulfa Nengsih
PENERAPAN GENERALIZED ADDITIVE MODELS TERHADAP DATA PRODUKSI PADI DI INDONESIA
194 Isra Safriana, Ida Fajri, Miftahuddin
PENENTUAN FAKTOR-FAKTOR YANG MENYEBABKAN BANYAKNYA KASUS DEMAM BERDARAH DENGUE DI KOTA JAMBI DENGAN MODEL
GEOGRAPHICALLY WEIGHTED POISSON REGRESSION
205
29 Penentuan Lintasan Terpendek pada Suatu Grap Berbobot dengan menggunakan
Program Dinamik
Eldawati, Said Munzir, Marwan Ramli
Program Studi Matematika, Universitas Syiah Kuala Banda Aceh Email : [email protected]
ABSTRAK
Tulisan ini mendiskusikan penggunaan program dinamis untuk menentukan lintasan terpendek pada suatu graf lengkap berbobot. Graf lengkap merupakan graf sederhana yang setiap vertexnya mempunyai sisi ke semua vertex lainnya. Graf lengkap bebobot adalah graf lengkap yang setiap sisinya memiliki bobot. Bobot yang dikaji adalah jarak antara setiap pasang vertex. Lintasan terpendek pada graf adalah sebuah lintasan yang memiliki jumlah bobot sisi yang paling minimum. Program dinamis merupakan salah satu metode pemecahan masalah dengan cara menguraikan solusi menjadi sekumpulan langkah atau tahapan sedemikian sehingga solusi dari persoalan dapat dipandang dari serangkaian keputusan yang saling berkaitan. Program dinamis menghitung bobot terkecil dari semua sisi yang menghubungkan sebuah pasangan vertex, dilakukan sekaligus untuk semua pasangan vertex. Penentuan lintasan terpendek menggunakan program dinamis menghasilkan suatu matriks hubung. Matriks hubung digunakan untuk menyatakan graf yang sisinya menghubungkan setiap vertex.
Kata kunci: lintasan terpendek, graf, vertex, program dinamis, matriks hubung.
PENDAHULUAN
Dalam kehidupan sehari-hari banyak persoalan yang dapat diimplementasikan dengan graf. Graf adalah himpunan vertex yang dihubungkan dengan sisi-sisi (Gross, 2004). Setiap sisi dihubungkan tepat oleh dua vertex. Graf merupakan model matematika yang sangat kompleks dan rumit, tapi dapat juga menjadi solusi yang baik untuk kasus-kasus tertentu. Banyak aplikasi yang menggunakan graf sebagai alat untuk merepresentasikan atau memodelkan persoalan sehingga persoalan itu dapat diselesaikan dengan baik (Novandi, 2007). Aplikasi-aplikasi tersebut misalnya dalam menentukan masalah lintasan terpendek, persoalan pedagang keliling, persoalan tukang pos Cina, pewarnaan graf, pembuatan sistem jalan raya satu arah, menentukan peringkat peserta sebuah turnamen, dan sebagainya (Diestel, 2005).
Persoalan lintasan terpendek merupakan suatu permasalahan untuk mencari lintasan antara dua buah vertex pada graf berbobot yang memiliki gabungan nilai jumlah bobot pada sisi graf yang dilalui dengan jumlah yang paling minimum (Fajar, 2007). Aplikasi yang paling sering ditemui adalah pada bidang transportasi dan komunikasi, seperti pada pencarian rute terbaik untuk menempuh dua kota atau untuk mengetahui dan menelusuri proses pengiriman paket data komunikasi dalam suatu jaringan komunikasi agar dihasilkan suatu proses pengiriman yang paling cepat (Reza, 2007).
Terdapat beberapa macam persoalan lintasan terpendek : lintasan terpendek antara dua buah vertex tertentu, lintasan terpendek antara semua pasangan vertex, lintasan terpendek dari
30 vertex tertentu ke semua vertex yang lain, dan lintasan terpendek antara dua buah vertex yang melalui beberapa vertex tertentu. Salah satu teknik untuk menentukan solusi minimum dari permasalahan lintasan terpendek adalah program dinamis (Eka, 2007). Program dinamis merupakan suatu teknik matematis yang membuat serangkaian keputusan yang saling berhubungan. Program dinamis menyediakan prosedur sistematis untuk menentukan kombinasi keputusan yang optimal (Hillier, 1990).
Program dinamis sebagai pencari lintasan terpendek cocok untuk berbagai ukuran jumlah vertex dan bobot yang diberikan dapat berupa bobot positif maupun negatif. Karena menganut sistem optimal, program dinamis selalu menghasilkan solusi yang optimal. Tulisan ini memaparkan penentuan solusi lintasan terpendek dengan menggunakan program dinamis pada suatu graf lengkap dengan tujuh vertex ( .
TINJAUAN KEPUSTAKAAN
Teori graf merupakan pokok bahasan yang sudah tua usianya namun memiliki banyak terapan dalam kehidupan sehari-hari. Graf digunakan untuk merepresentasikan objek-objek diskrit dan hubungan antara objek-objek tersebut. Banyak persoalan pada dunia nyata yang sebenarnya merupakan representasi visual dari graf. Contoh salah satu representasi visual dari graf adalah peta. Banyak hal yang dapat digali dari representasi tersebut, diantaranya adalah menentukan jalur terpendek dari satu tempat ke tempat lain, menggambarkan 2 kota yang bertetangga dengan warna yang berbeda pada peta, menentukan tata letak jalur transportasi, pengaturan jaringan komunikasi atau jaringan internet dan masih banyak lagi. Selain peta, masih banyak hal lain dalam dunia nyata yang merupakan representasi visual dari graf (Aditya, 2007).
Graf G didefinisikan sebagai sepasang himpunan (V,E), ditulis dengan notasi G = (V, E), yang dalam hal ini V adalah himpunan tidak kosong dari vertex-vertex dan E adalah himpunan sisi (edge) yang menghubungkan sepasang vertex (Rosen, 2000).
Graf berbobot adalah graf yang setiap sisinya diberi sebuah harga (bobot) (Siang, 2002). Bobot pada tiap sisi dapat berbeda-beda tergantung pada masalah yang dimodelkan dengan graf. Bobot dapat menyatakan jarak antara dua buah kota, biaya perjalanan antara dua buah kota, waktu tempuh pesan dari sebuah simpul komunikasi ke simpul komunikasi lain (dalam jaringan komputer), ongkos produksi, biaya pembangunan dan sebagainya (Munir, 2005).
Jenis-jenis Graf
Berdasarkan ada tidaknya gelang atau sisi ganda pada suatu graf, secara umum graf dapat dibedakan menjadi dua jenis, yaitu :
1. Graf sederhana, yaitu graf yang tidak memiliki gelang maupun sisi ganda. Dalam graf sederhana, sisi adalah pasangan tidak terurut. Penulisan urutan sisi tidak menjadi permasalahan. Ada beberapa graf sederhana khusus yang dijumpai pada banyak aplikasi (Rosen, 2000):
a. Graf Lengkap (Complete Graph)
Graf lengkap adalah graf sederhana yang setiap vertexnya mempunyai sisi ke semua vertex lainnya. Graf lengkap dengan n buah vertex disimbolkan dengan Kn. Jumlah sisi
pada graf lengkap yang terdiri dari n buah vertex adalah buah. b. Graf lingkaran
Graf lingkaran adalah graf sederhana yang setiap vertexnya berderajat dua. Graf lingkaran dengan n simpul dilambangkan dengan Cn.
31 Graf yang setiap vertex nya mempunyai derajat yang sama disebut graf teratur. Apabila derajat setiap simpul adalah r, maka graf tersebut disebut sebagai graf teratur derajat r. Jumlah sisi pada graf teratur adalah .
2. Graf tak sederhana, yaitu graf yang memiliki gelang maupun sisi ganda. Ada dua macam graf tak sederhana, yaitu graf ganda (graf yang memiliki sisi ganda) dan graf semu (graf yang memiliki sisi gelang).
Lintasan dan Cycle
Jalan dengan panjang n dari vertex a ke b pada graf G adalah barisan vertex
yang terdiri dari vertex dan sisi di G yang diawali dan diakhiri dengan vertex, sedemikian hingga adalah sisi di G untuk setiap .
Jalan menghubungkan titik dan , dan dapat juga dinotasikan sebagai . Jalan dikatakan tertutup jika a = b dan terbuka jika a ≠ b.
Jejak (trail) adalah jalan dimana tidak ada sisi yang berulang. Jalan dikatakan lintasan (path) jika semua vertexnya berbeda. Lintasan adalah jejak, akan tetapi tidak semua jejak adalah lintasan. Sedangkan jalan tertutup dinamakan sikel (cycle).
Matriks Hubung
Matriks hubung (adjacency matrix) digunakan untuk menyatakan graf dengan cara menyatakannya dalam jumlah sisi yang menghubungkan vertex-vertexnya. Jumlah baris dan kolom matriks hubung sama dengan jumlah vertex dalam graf.
Misalkan G adalah graf tak berarah dengan vertex-vertex (n berhing-ga). Matriks hubung yang sesuai dengan graf G adalah matriks dengan menyatakan jumlah sisi yang menghubungkan vertex dengan vertex ; dimana . Matriks hubung selalu merupakan matriks yang simetris ( ).
Menurut Gros (2004), ada beberapa hal yang harus diperhatikan dalam mempresen-tasikan graf dengan matriks hubung :
1. Graf tidak mempunyai gelang jika dan hanya jika semua unsur diagonal utama = 0. Sisi gelang pada vertex 1.
2. Graf G adalah graf lengkap jika dan hanya jika semua unsur dalam diagonal utama = 0 dan semua unsur di luar diagonal utama = 1.
Lintasan Terpendek (Shortest Path)
Lintasan terpendek adalah lintasan minimum yang diperlukan untuk mencapai suatu tempat dari tempat tertentu. Lintasan minimum yang dimaksud dapat dicari dengan menggunakan graf. Graf yang digunakan adalah graf yang berbobot, yaitu graf yang setiap sisinya diberikan suatu nilai atau bobot. Dalam kasus ini, bobot yang dimaksud berupa jarak (Reza, 2007).
Ada beberapa macam persoalan lintasan terpendek, antara lain:
a. Lintasan terpendek antara dua buah simpul tertentu (a pair shortest path). b. Lintasan terpendek antara semua pasangan simpul (all pairs shortest path).
c. Lintasan terpendek dari simpul tertentu ke semua simpul yang lain (single-source shortest path).
d. Lintasan terpendek antara dua buah simpul yang melalui beberapa simpul tertentu (intermediate shortest path).
32 METODE PENELITIAN
Program dinamis adalah metode pemecahan masalah dengan cara menguraikan solusi menjadi sekumpulan langkah atau tahapan sedemikian rupa sehingga solusi dari persoalan dapat dipandang dari serangkaian keputusan yang saling berkaitan (Eka, 2007).
Berbeda dari pemrograman linier, tidak terdapat rumusan matematis standar dalam masalah pemrograman dinamis. Akan tetapi pemrograman dinamis adalah suatu tipe pendekatan umum dalam pemecahan masalah dan persamaan-persamaan tertentu yang digunakan harus dibuat sesuai situasi yang sifatnya individual. Pada penyelesaian metode ini kita menggunakan persyaratan optimasi dan kendala untuk membatasi sejumlah pilihan yang harus dipertimbangkan pada suatu tahap (Fajar, 2007).
Program dinamis memiliki karakteristik sebagai berikut:
1. Permasalahannya dapat dibagi menjadi beberapa tahap, yang pada setiap tahap hanya diambil satu keputusan yang optimal.
2. Masing-masing tahap terdiri dari sejumlah status yang berhubungan dengan tahap tersebut.
3. Hasil keputusan yang diambil pada setiap tahap ditransformasikan dari status yang bersangkutan ke status berikutnya pada tahap berikutnya.
4. Jarak pada suatu tahap bergantung pada jarak tahap-tahap sebelumnya dan meningkat secara teratur dengan bertambahnya jumlah tahapan.
5. Keputusan terbaik pada suatu tahap bersifat independen terhadap keputusan yang dilakukan tahap sebelumnya.
6. Adanya hubungan rekursif yang mengidentifikasikan keputusan terbaik untuk setiap status pada tahap k memberikan keputusan terbaik untuk tahap sebelumnya.
7. Prinsip optimalitas berlaku pada persoalan tersebut.
Misalkan x1,x2,...,xn menyatakan peubah (variable) keputusan untuk tahap 1, 2, ..., n.
Dalam menyelesaikan persoalan dengan program dinamis dapat menggunakan dua pendekatan berbeda yaitu :
a. Maju (forward atau up-down) : bergerak mulai dari tahap 1, terus maju ke tahap 2,3,..,n. Urutan variabel keputusan adalah x1,x2,...,xn.
b. Mundur (backward atau bottom-up) : bergerak mulai dari tahap n, terus mundur ke tahap n-1, n-2,..,2,1. Urutan variabel keputusan adalah xn, xn-1, ..., x2,x1.
Untuk menentukan semua pasangan lintasan terpendek dalam graf berbobot dapat dipakai program dinamis. Misalkan G = (V,E) adalah graf dengan n buah simpul, dan C adalah bobot untuk G sedemikian sehingga C (i,i) = 0, 1 ≤ i ≤ n, dan C(i,j) adalah bobot dari sisi <i,j> jika <i,j> ∈ E (G) dan C (i,j) = ∞ jika i ≠ j dan <i,j> ∉ E (G).
Masalah pasangan lintasan terpendek adalah menentukan matriks A sedemikian sehingga A (i,j) adalah panjang lintasan terpendek dari i ke j. Definisikan Ak (i,j) adalah panjang lintasan terpendek dari i ke j yang tidak melalui simpul yang lebih besar dari k. A(i,j) dapat diperoleh :
() (2.1) Karena A0 (i,j) = C (i,j), 1≤ i ≤ n, 1≤ j ≤ n., maka
33 Berikut ini adalah algoritma untuk mencari semua pasangan lintasan terpendek:
1. C (i,j) = A0 (i,j)
2. Untuk k = 1 hingga n, lakukan Untuk i = 1 hingga n , lakukan Untuk j = 1 hingga n , lakukan Jika A[i,j] > A[i,k] + A[k,j] maka Ganti A[i,j] dengan A[i,k] + A[k,j] 3. A[i,j] = A[i,k] + A[k,j]
HASIL DAN PEMBAHASAN
Pencarian lintasan terpendek dengan menggunakan program dinamis menghasilkan suatu solusi berupa matrik hubung yang setiap unsurnya mengandung bobot minimum dari semua pasangan vertex di , dalam hal ini bobot merupakan jarak dari suatu vertex ke vetex yang lain di . Pencarian lintasan terpendek pada graf terjadi dalam 7 tahap, dimana pada tahap awal (k = 0) nilainya sama dengan nilai bobot awal pada graf Kemudian untuk tahap selanjutnya di dapat matrik hubung minimum dengan cara membandingkan nilai dari
dan . Secara matematis dapat ditulis:
Program dinamis (Dynamic Programming) adalah metode pemecahan masalah dengan cara menguraikan solusi menjadi sekumpulan langkah atau tahapan sedemikian sehingga solusi dari persoalan dapat dipandang menjadi serangkaian keputusan yang saling berkaitan. program dinamis memerlukan input berupa matriks hubung. Pada graf berbobot nilai unsur matriks hubung yang terbentuk merupakan bobot dari sisi yang menghubungkan setiap vertex pada graf tersebut.
Gambar 1. Graf berbobot
Untuk menyelesaikan pencarian lintasan terpendek pada suatu graf lengkap dengan tujuh vertex K7, terlebih dahulu ditentukan matriks hubung dari graf tersebut. Hal ini
dimaksudkan untuk mendapatkan nilai (bobot awal) yang akan diinputkan sebagai bobot dari i ke j. Tabel 1 menyajikan bobot graf pada Gambar 1. Terlihat bahwa pada tahap k = 0, nilai =
Tabel 1. Bobot awal dari graf lengkap dengan tujuh vertex v1 v2 v3 v4 v5 v6 v7 v1 0 3 6 8 9 7 3 v2 3 0 2 6 7 6 5 v3 6 2 0 4 6 5 6 2
v
v
v
v
v
v
v
3 3 2 4 2 1 6 8 9 7 6 6 6 7 5 7 6 8 6 5 6 6 6 7 7 6 5 7 7 9 7 6 6 534 v4 8 6 4 0 2 7 6
v5 9 7 6 2 0 2 7
v6 7 6 5 7 2 0 1
v7 3 5 6 6 7 1 0
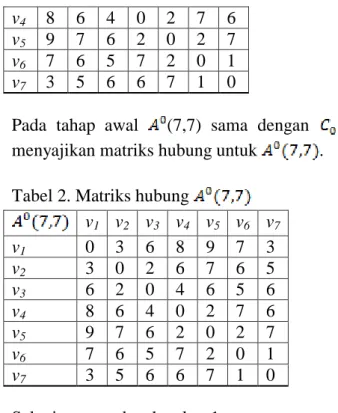
Pada tahap awal (7,7) sama dengan (matriks bobot awal pada graf ). Tabel 2 menyajikan matriks hubung untuk .
Tabel 2. Matriks hubung
v1 v2 v3 v4 v5 v6 v7 v1 0 3 6 8 9 7 3 v2 3 0 2 6 7 6 5 v3 6 2 0 4 6 5 6 v4 8 6 4 0 2 7 6 v5 9 7 6 2 0 2 7 v6 7 6 5 7 2 0 1 v7 3 5 6 6 7 1 0
Selanjutnya pada tahap k = 1,
, nilai
yang diperoleh dengan menjumlahkan semua baris pertama yang diberi warna merah dengan semua kolom pertama yang berwarna merah (Tabel 3).
Tabel 3. Matriks hubung
v1 v2 v3 v4 v5 v6 v7 v1 0 3 6 8 9 7 3 v2 3 6 9 11 12 10 6 v3 6 9 12 14 15 13 9 v4 8 11 14 16 17 15 11 v5 9 12 15 17 18 16 12 v6 7 10 13 15 16 14 10 v7 3 6 9 11 12 10 6
Berdasarkan Tabel 3 terlihat bahwa semua nilai matriks hubung > . Dengan demikian dipilih sebagai . Karena nilai
maka pada tahap ini tidak terjadi perubahan matriks hubung. Tabel 4. Matriks hubung
v1 v2 v3 v4 v5 v6 v7 v1 0 3 6 8 9 7 3 v2 3 0 2 6 7 6 5 v3 6 2 0 4 6 5 6 v4 8 6 4 0 2 7 6 v5 9 7 6 2 0 2 7 v6 7 6 5 7 2 0 1 v7 3 5 6 6 7 1 0
35 Kemudian pada tahap k = 2, diperoleh
.
Nilai dihitung dengan menjumlahkan semua baris kedua yang diberi warna merah dengan semua kolom kedua yang berwarna merah.
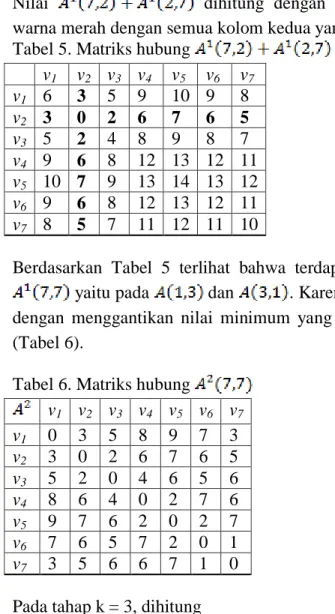
Tabel 5. Matriks hubung
v1 v2 v3 v4 v5 v6 v7 v1 6 3 5 9 10 9 8 v2 3 0 2 6 7 6 5 v3 5 2 4 8 9 8 7 v4 9 6 8 12 13 12 11 v5 10 7 9 13 14 13 12 v6 9 6 8 12 13 12 11 v7 8 5 7 11 12 11 10
Berdasarkan Tabel 5 terlihat bahwa terdapat nilai matriks hubung <
yaitu pada dan . Karena itu dipilih sebagai
dengan menggantikan nilai minimum yang terdapat di menjadi (Tabel 6).
Tabel 6. Matriks hubung v1 v2 v3 v4 v5 v6 v7 v1 0 3 5 8 9 7 3 v2 3 0 2 6 7 6 5 v3 5 2 0 4 6 5 6 v4 8 6 4 0 2 7 6 v5 9 7 6 2 0 2 7 v6 7 6 5 7 2 0 1 v7 3 5 6 6 7 1 0
Pada tahap k = 3, dihitung
.
Nilai diperoleh dengan menjumlahkan semua baris ketiga yang diberi warna merah dengan semua kolom ketiga yang berwarna merah.
Tabel 7. Matriks hubung
v1 v2 v3 v4 v5 v6 v7 v1 10 7 5 9 11 10 11 v2 7 4 2 6 8 7 8 v3 5 2 0 4 6 5 6 v4 9 6 4 8 10 9 10 v5 11 8 6 10 12 11 12 v6 10 7 5 9 11 10 11 v7 11 8 6 10 12 11 12
36 Terlihat bahwa semua nilai matriks hubung > maka dipilih sebagai . Karena nilai maka pada tahap ini tidak terjadi perubahan matriks hubung.
Tabel 8. Matriks hubung v1 v2 v3 v4 v5 v6 v7 v1 0 3 5 8 9 7 3 v2 3 0 2 6 7 6 5 v3 5 2 0 4 6 5 6 v4 8 6 4 0 2 7 6 v5 9 7 6 2 0 2 7 v6 7 6 5 7 2 0 1 v7 3 5 6 6 7 1 0
Pada tahap k = 4, dihitung nilai
.
Nilai diperoleh dengan menjumlahkan semua baris keempat yang diberi warna merah dengan semua kolom keempat yang berwarna merah.
Tabel 9. Matriks hubung
v1 v2 v3 v4 v5 v6 v7 v1 16 14 12 8 10 15 14 v2 14 12 10 6 8 13 12 v3 12 10 8 4 6 11 10 v4 8 6 4 0 2 7 6 v5 10 8 6 2 4 9 8 v6 15 13 11 7 9 14 13 v7 14 12 10 6 8 13 12
Terlihat bahwa semua nilai matriks hubung > maka dipilih sebagai . Karena nilai maka pada tahap ini tidak terjadi perubahan matriks hubung.
Tabel10. Matriks hubung v1 v2 v3 v4 v5 v6 v7 v1 0 3 5 8 9 7 3 v2 3 0 2 6 7 6 5 v3 5 2 0 4 6 5 6 v4 8 6 4 0 2 7 6 v5 9 7 6 2 0 2 7 v6 7 6 5 7 2 0 1 v7 3 5 6 6 7 1 0
Pada tahap k = 5, dihitung
37 Nilai diperoleh dengan menjumlahkan semua baris kelima yang diberi warna merah dengan semua kolom kelima yang berwarna merah.
Tabel 11. Matriks hubung
v1 v2 v3 v4 v5 v6 v7 v1 18 16 15 11 9 11 16 v2 16 14 13 9 7 9 14 v3 15 13 12 8 6 8 13 v4 16 9 8 4 2 4 9 v5 9 7 6 2 0 2 7 v6 11 9 8 4 2 4 9 v7 16 14 13 9 7 9 14
Terlihat bahwa nilai matriks hubung < yaitu pada dan . Karenanya dipilih sebagai dengan menggantikan nilai
minimum yang terdapat di menjadi .
Tabel 12. Matriks hubung v1 v2 v3 v4 v5 v6 v7 v1 0 3 5 8 9 7 3 v2 3 0 2 6 7 6 5 v3 5 2 0 4 6 5 6 v4 8 6 4 0 2 4 6 v5 9 7 6 2 0 2 7 v6 7 6 5 4 2 0 1 v7 3 5 6 6 7 1 0
Pada tahap k = 6, dhitung nilai
.
Nilai diperoleh dengan menjumlahkan semua baris keenam yang diberi warna merah dengan semua kolom keenam yang berwarna merah.
Tabel13. Matriks hubung
v1 v2 v3 v4 v5 v6 v7 v1 14 13 12 11 9 7 8 v2 13 12 11 10 8 6 7 v3 12 11 10 9 7 5 6 v4 11 10 9 8 6 4 5 v5 9 8 7 6 4 2 3 v6 7 6 5 4 2 0 1 v7 8 7 6 5 3 1 2
Terlihat bahwa nilai matriks hubung < yaitu pada dan . Karena itu dipilih sebagai
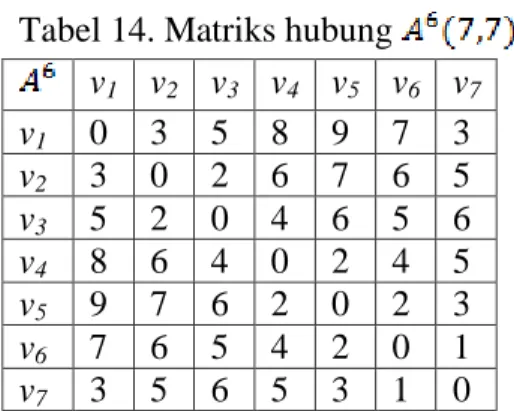
38 Tabel 14. Matriks hubung
v1 v2 v3 v4 v5 v6 v7 v1 0 3 5 8 9 7 3 v2 3 0 2 6 7 6 5 v3 5 2 0 4 6 5 6 v4 8 6 4 0 2 4 5 v5 9 7 6 2 0 2 3 v6 7 6 5 4 2 0 1 v7 3 5 6 5 3 1 0
Pada tahap k = 7, dihitung nilai
.
Nilai didapat dengan menjumlahkan semua baris ketujuh yang diberi warna merah dengan semua kolom ketujuh yang berwarna merah.
Tabel 15. Matriks hubung v1 v2 v3 v4 v5 v6 v7 v1 6 8 9 8 6 4 3 v2 8 10 11 10 8 6 5 v3 9 11 12 11 9 7 6 v4 8 10 11 10 8 6 5 v5 6 8 9 8 6 4 3 v6 4 6 7 6 4 2 1 v7 3 5 6 5 3 1 0
Terlihat bahwa terdapat nilai matriks hubung < yaitu pada dan . Karenanya dipilih sebagai
dengan menggantikan nilai minimum yang terdapat di menjadi . Tabel 16. Matriks hubung
v1 v2 v3 v4 v5 v6 v7 v1 0 3 5 8 6 4 3 v2 3 0 2 6 7 6 5 v3 5 2 0 4 6 5 6 v4 8 6 4 0 2 4 5 v5 6 7 6 2 0 2 3 v6 4 6 5 4 2 0 1 v7 3 5 6 5 3 1 0
Dari tahap k = 7 didapat sebagai hasil dari lintasan terpendek pada graf . Berikut adalah kombinasi keputusan yang terbaik untuk suatu lintasan terpendek dari suatu vertex ke semua pasang vertex di :
Lintasan terpendek dari vertex v1 ke semua vertex di
v1 → v2 = 3
v1 → v2 → v3 = 5
39 v1 → v7 → v6 → v5 = 6
v1 → v7 → v6 = 4
v1 → v7 = 3
Lintasan terpendek dari vertex v2 ke semua vertex di
v2 → v1 = 3 v2 → v3 = 2 v2 → v4 = 6 dan v2 → v3 → v4 = 6 v2 → v5 = 7 v2 → v6 = 6 v2 → v7 = 5
Lintasan terpendek dari vertex v3 ke semua vertex di
v3 → v2 → v1 = 5 v3 → v2 = 2 v3 → v4 = 4 v3 → v5 = 6 dan v3 → v4 → v5 = 6 v3 → v6 = 5 v3 → v7 = 6 dan v3 → v6 → v7 = 6
Lintasan terpendek dari vertex v4 ke semua vertex di
v4 → v1 = 8 dan v4 → v5 → v6 → v7 → v1 = 8 v4 → v2 = 6 dan v4 → v3 → v2 = 6 v4 → v3 = 4 v4 → v5 = 2 v4 → v5 → v6 = 4 v4 → v5 → v6 → v7 = 5
Lintasan terpendek dari vertex v5 ke semua vertex di
v5 → v6 → v7 → v1 = 6 v5 → v2 = 7 v5 → v3 = 6 dan v5 → v4 → v3 = 6 v5 → v4 = 2 v5 → v6 = 2 v5 → v6 → v7 = 3
Lintasan terpendek dari vertex v6 ke semua vertex di
v6 → v7 → v1 = 4 v6 → v2 = 6 v6 → v3 = 5 v6 → v5 → v4 = 4 v6 → v5 = 2 v6 → v7 = 1
Lintasan terpendek dari vertex v7 ke semua vertex di
v7 → v1 = 3 v7 → v2 = 5 v7 → v3 = 6 v7 → v6 → v5 → v4 = 5 v7 → v6 → v5 = 3 v7 → v6 = 1 KESIMPULAN
Penyelesaian dengan menggunakan program dinamis masalah lintasan terpendek merupakan kombinasi keputusan yang dibangun dengan menggunakan prinsip optimal dari
40 suatu vertex ke semua pasang vertex pada suatu graf. Lintasan terpendek didapatkan setelah semua tahap terselesaikan. Terlihat bahwa terdapat lintasan terpendek ke suatu vertex yang tidak hanya menghasilkan satu keputusan. Ini merupakan salah satu kelebihan dari program dinamis. Dengan program dinamis didapat lintasan terpendek antara semua pasang vertex di K7. Hasil lintasan terpendek merupakan suatu matrik hubung. Tahap atau iterasi pada suatu graf sama dengan banyak vertex yang terdapat pada graf tersebut.
DAFTAR PUSTAKA
Aditya, P.B., 2007, Studi dan Implementasi Persoalan Lintasan Terpendek Suatu Graf Dengan Algoritma Dijkstra Dan Algoritma Bellman-Ford, Bandung, Program Studi Teknik Informatika, Institut Teknologi Bandung
Boyer, J.M., 2004, On The Cutting Edge : Simplified O(n) Planarity by Edge Addition, Journal of Graph Algorithms and Applications, vol. 8, no. 3, pp. 241-27, Pure Edge Solutions Inc. Chicago.
Diestel, R., 2005, Graph Theory, Springer-Verlag Heidelberg, New York.
Eka, Y.D., 2007, Penerapan Algoritma Program Dinamis pada Penyelesaian Persoalan Partisi, Laboratorium Ilmu dan Rekayasa Komputasi, Institut Teknologi Bandung.
Fajar I., 2007, Algoritma Mencari Lintasan Terpendek, Departemen Teknik Infor-matika, Institut Teknologi Bandung.
Gross, 2004, Handbook of Graph Theory, CRC Press, USA. Hiller, F.S., 1990, Pengantar Riset Operasi, Erlangga, Jakarta. Munir, R., 2005, Matematika Diskrit, Bandung, Informatika.
Novandi, RAD., 2007, Perbandingan Algorit-ma Dijkstra dan Algoritma Floyd-Warshall dalam Penentuan Lintasan Terpendek (Single Pair Shortest Path), Sekolah Teknik Elektro dan Informatika Institut Teknologi Bandung.
Siang, J.J., 2002, Matematika Diskrit dan Aplikasinya Pada Ilmu Komputer, Penerbit ANDI, Yogyakarta.
Simpson, A., 2002, Discrete Mathematics by Example, McGraw Hill, America.
Reza, A.T., 2007, Strategi Greedy pada Kasus Pencarian Lintasan Terpendek, Bandung, Sekolah Teknik Elektro dan Informatika Institut Teknologi Bandung.
Rosen, K.H., 2000, Handbook of Discrete and Combinatorial Mathematics, CRC Press, New York.
64 APLIKASI KONTROL OPTIMAL PADA POLAR ROBOT UNTUK OBJEKTIF GANDA: MEMINIMUMKAN BESAR TORSI DAN PENCAPAIAN POSISI TARGET
DENGAN WAKTU MINIMUM
Said Munzir, Marwan, Taufiq Iskandar dan Reza Wafdan
Magister of Mathematics, Syiah Kuala University, Banda Aceh, 23111, Indonesia. Email: [email protected]
ABSTRACT
Penelitian ini mengkaji aplikasi kontrol optimal pada pengontrolan polar robot yang bergerak dari sebuah posisi awal menuju posisi akhir tertentu. Kajian difokuskan pada perhitungan torsi minimum pada masing-masing segmen polar robot yang akan menggerakkan robot untuk mencapai posisi akhirnya dalam waktu yang secepat mungkin. Penyelesaian masalah kontrol optimal disini dilakukan dengan pendekatan numerik dengan mendiskretisasikan model dinamik dari polar robot serta objektif dari kontrol optimal, menggunakan pendekatan Pseudo Spectral Method (PSM). Hasil-hasil yang diperoleh disimulasikan dalam bentuk grafis dan animasi pergerakan robot juga ditampilkan menggunakan Matlab. Hasil simulasi dan animasi menunjukkan bahwa nilai-nilai variabel state dan kontrol berevolusi secara mulus yang menggambarkan bahwa pergerakan polar robot akan berlangsung secara stabil dan mulus.
Keywords: Kontrol Optimal, Polar Robot, Pseudo Spectral
PENDAHULUAN
Robot secara sederhana dapat diartikan sebagai sebuah sistem mekanik yang menggunakan pengawasan dan kontrol manusia, ataupun menggunakan kecerdasan buatan untuk membantu pekerjaan manusia. Robot biasanya digunakan untuk tugas yang berat, berbahaya, pekerjaan yang berulang dan kotor. Kebanyakan robot digunakan dalam bidang industri. Selain bidang industri, robot juga digunakan untuk pembersihan limbah beracun, penjinak bom, penjelajahan bawah air dan luar angkasa, dan pertambangan. Bahkan sekarang robot mulai memasuki bidang hiburan, alat pembantu rumah tangga, seperti penyedot debu, dan pemotong rumput. Kenbanyakan orang beranggapan bahwa robot adalah sebuah mesin yang menyerupai manusia, memiliki tubuh dengan kepala, lengan tangan dan kaki, namun hanya struktur tubuhnya saja yang berbeda yaitu terbuat dari logam. Padahal kebanyakan robot tidak berbentuk seperti manusia, setiap robot memiliki bentuk yang berbeda-beda tergantung tugas yang dilakukannya, misalnya robot lengan dalam bidang industri.
65 Gambar 1. Jenis-jenis robot industri
Secara umum, robot lengan dalam bidang industri terbagi atas lima jenis, yaitu polar robot, cylindrical robot, jointed arm robot, cartesian and gantry robot, dan selective compliance assembly robotic arm robot (SCARA) seperti pada Gambar 1. Penjelasan dari kelima jenis robot lengan ini dapat dilihat pada Table 1 berikut.
Tabel 1. Robot-robot lengan dalam bidang industri
No. Jenis Robot Penjelasan
1. Polar robot Sebuah robot lengan yang mampu memperpanjang lengan secara linier dan berputar secara vertikal maupun horizontal 2. Cylindrical robot Sebuah robot lengan yang mampu memperpanjang lengan
secara linier dan bergerak secara vertikal ke atas dan ke bawah serta berputar secara horizontal
3. Jointed arm robot Sebuah robot lengan yang memiliki dua sendi yang mampu berputar secara vertikal dan satu sendi berputar secara horizontal
4. Cartesian and gantry robot
Sebuah robot lengan yang mampu memperpanjang lengan secara linier dan bergerak secara vertikal ke atas dan ke bawah serta bergerak secara horizontal ke kiri dan ke kanan 5. Selective compliance
assembly robotic arm (SCARA)
Sebuah robot lengan yang mampu memperpanjang lengan secara linier dan memiliki dua sendi yang mampu berputar secara horizontal
Kelima jenis robot lengan tersebut memiliki bentuk yang berbeda-beda sesuai dengan fungsinya. Pada artikel ini akan dipaparkan sebuah penelitian mengenai pengontrolan robot lengan yang termasuk ke dalam jenis polar robot. Adapun tujuan penelitian ini yaitu difokuskan pada perhitungan gaya dan torsi minimum pada masing-masing segmen polar robot yang akan menggerakkan robot untuk mencapai posisi akhirnya dalam waktu yang secepat mungkin. Penelitian tentang permasalahan robot lengan ini pertama sekali diperkenalkan oleh Monika Mössner-Beigel (Heidelberg University) dalam tulisannya [1]. Pada penelitian sebelumnya, Monika hanya mencari waktu minimum, sedangkan pada penelitian ini, akan dicari waktu minimum beserta penggunaan gaya dan torsi minimum.
Polar
Robot
Cylindr
ical
Cartesian and
Gantry Robot
Jointe
d Arm
SCA
RA
66 METODE PENELITIAN
Polar robot terdiri dari tiga segmen yaitu sebuah lengan yang dapat digerakkan secara linier, sendi yang dapat diputar secara horizontal, dan sendi yang dapat diputar secara vertikal. Segmen pertama yaitu sebuah lengan yang dapat digerakkan secara linier, lengan ini dapat memanjang dengan cara didorong atau memendek dengan cara ditarik oleh sebuah motor pada pivot-nya. Panjang maksimal lengan robot tersebut disimbolkan dengan L dan dengan L = 5 satuan panjang. Ilustrasi dari lengan robot tersebut dapat dilihat pada Gambar 2 berikut.
Gambar 2. Panjang maksimal lengan polar robot
Panjang lengan polar robot dapat berubah-ubah sesuai dengan input yang diterima. Panjang lengan tersebut dapat disimbolkan sebagai sebuah fungsi waktu (t), nilai dari (t) berkisar antara nol sampai pada panjang maksimal lengan robot yaitu L. Ilustrasi dari panjang lengan robot tersebut dapat dilihat pada Gambar 3 berikut.
Gambar 3. Panjang lengan polar robot
Selain lengan dengan pergerakan linier, robot lengan jenis polar juga terdiri dari sebuah sendi yang dapat diputar secara horizontal. Sudut putaran lengan ini juga berubah-ubah sesuai dengan input yang diterima. Besar sudut putaran lengan ini disimbolkan dengan sebuah fungsi waktu (t). Nilai dari (t) berkisar antara - sampai . Ilustrasi dari besar sudut putaran horizontal lengan robot tersebut dapat dilihat pada Gambar 4 berikut.
67 Gambar 4. Besar sudut putaran horizontal lengan polar robot
Segmen lainnya dari polar robot tersebut yaitu sebuah sendi yang dapat diputar secara vertikal. Sudut putaran lengan secara vertikal ini diatur dengan sudut yang berubah-ubah sesuai input yang diterima. Besar sudut putaran ini disimbolkan dengan sebuah fungsi waktu
(t). Nilai dari (t) berkisar antara nol sampai . Ilustrasi dari besar sudut putaran vertikal lengan robot tersebut dapat dilihat pada Gambar 5 berikut.
Gambar 5. Besar sudut putaran vertikal lengan polar robot
Setiap pergerakan pada lengan robot tersebut baik pergerakan secara linier maupun putaran kedua sendinya terdapat sebuah motor yang menggerakkannya. Satu motor untuk menggerakkan lengan secara linier dan dua motor untuk menggerakkan putaran pada sendinya. Setiap motor tersebut membutuhkan energi listrik untuk menggerakkannya. Semakin banyak energi yang dibutuhkan maka semakin banyak pula biaya yang harus dikeluarkan. Oleh karena itu, penggunaan energi akan diatur seoptimal mungkin agar biaya yang dikeluarkan menjadi minimum. Energi pada ketiga motor tersebut sangat bergantung pada gaya yang diberikan pada setiap segmen robot tersebut.
Pergerakan lengan secara linier membutuhkan gaya untuk mendorong dan menarik lengan sesuai dengan yang input yang diberikan, gaya tersebut disimbolkan dengan sebuah variabel kontrol u1. Nilai dari u1 berkisar antara -1 sampai 1, nilai negatif berarti gaya untuk
menarik lengan robot, sedangkan nilai positif berarti gaya yang dibutuhkan untuk mendorong lengan robot tersebut. Dengan menggunakan hukum kedua Newton, diperoleh model matematika untuk u1 sebagai berikut, dengan ” adalah percepatan panjang lengan robot [1,
2, 3].
68 Pada sendi putar horizontal juga dibutuhkan gaya untuk menggerakkan lengan robot tersebut. Gaya yang bekerja pada sendi ini disebut juga dengan torsi karena pada gerak rotasi dan disimbolkan dengan sebuah variabel kontrol u2. Nilai dari u2 juga berkisar antara -1
sampai 1, nilai negatif berarti torsi untuk menggerakkan lengan searah jarum jam, sedangkan nilai positif berarti torsi untuk menggerakkan lengan robot berlawanan arah jarum jam. Dengan menggunakan hukum kedua Newton, diperoleh model matematika untuk u2 sebagai
berikut, dengan I1 adalah momen inersia massa pada benda dan ” adalah percepatan sudut
secara horizontal [1, 2, 3, 4].
(2) (3) Begitu juga untuk torsi pada sendi putar vertikal yang disimbolkan dengan sebuah variabel kontrol u3. Nilai dari u3 juga berkisar antara -1 sampai 1, nilai negatif berarti torsi
untuk menggerakkan lengan searah jarum jam, sedangkan nilai positif berarti torsi untuk menggerakkan lengan robot berlawanan arah jarum jam. Dengan menggunakan hukum kedua Newton, diperoleh model matematika untuk u3 sebagai berikut, dengan I2 adalah momen
inersia massa pada benda dan ” adalah percepatan sudut secara vertikal [1, 2, 3, 4].
(4) (5) Koordinat dari robot lengan jenis polar ini dapat didefinisikan dengan ((t), (t), (t)). Kondisi awal dari posisi lengan robot adalah ((0), (0), (0)). Dari posisi awal tersebut, lengan akan bergerak dengan path tertentu untuk mengambil sebuah objek pada koordinat (x*, y*, z*). Koordinat objek (x*, y*, z*) akan menjadi sebagai kondisi akhir dari posisi lengan yaitu ((tf), (tf), (tf)). Selanjutnya, untuk waktu dari 0 sampai tf, akan dicari sebuah path
((t), (t), (t)) dari posisi ((0), (0), (0)) ke posisi ((tf), (tf), (tf)), sedemikian hingga
nilai tf, u1, u2, dan u3 bernilai minimum. Ilustrasi dari permasalahan di atas dapat dilihat pada
Gambar 6 berikut.
Gambar 6. Gerak lengan untuk mengambil objek
Koordinat objek yang diberikan adalah (x*, y*, z*), sedangkan koordinat lengan robot pada posisi yang sama dengan koordinat objek adalah ((tf), (tf), (tf)). Karena kedua
69 koordinat tersebut berbeda, maka langkah awal sebelum menyelesaikan permasalahan pengontrolan lengan robot ini yaitu mengubah koordinat (x*, y*, z*) menjadi koordinat ((tf),
(tf), (tf)).
Gambar 7. Penyesuaian koordinat
Perhatikan Gambar 7, langkah pertama yang harus dilakukan adalah mencari nilai dari
(tf), yaitu panjang lengan robot saat mengambil objek. Nilai dari (tf) dapat dihitung dengan
menggunakan rumus pythagoras dengan sisi miringnya (tf), sisi tegaknya z* dan sisi
datarnya r. Panjang sisi r juga dapat dihitung dengan menggunakan rumus pythagoras dengan sisi miringnya r, sisi tegaknya y* dan sisi datarnya x*. Kedua persamaan tersebut dapat ditulis sebagai berikut.
(6)
(7) Setelah mendapatkan nilai dari (tf), selanjutnya akan dicari nilai dari (tf), yaitu sudut
horizontal lengan robot saat mengambil objek. Nilai dari (tf) tersebut dapat diperoleh dengan
menggunakan persamaan (8) berikut.
(8)
Selanjutnya mencari nilai dari (tf), yaitu sudut vertikal lengan robot saat mengambil
objek. Nilai dari (tf) tersebut dapat diperoleh dengan menggunakan persamaan (9) berikut.
(9)
Dengan menggunakan persamaan (6), (8), dan (9), diperoleh koordinat ((tf), (tf),
(tf)) yang merupakan kondisi akhir lengan robot saat mengambil objek pada koordinat (x*,
y*, z*).
HASIL DAN PEMBAHASAN
Pada penelitian ini, kajian difokuskan pada perhitungan gaya dan torsi minimum pada masing-masing segmen polar robot yang akan menggerakkan robot untuk mencapai posisi
70 akhirnya dalam waktu yang secepat mungkin, dengan kata lain, akan dicari nilai tf, u1, u2, dan
u3 yang minimum. Sehingga fungsi tujuan dapat ditulis sebagai berikut.
(10) Dengan kendala sebagai berikut,
(11)
dan kondisi awal dan kondisi batas sebagai berikut [1, 2, 3],
(12)
(13)
(14) (15)
0 L - 0
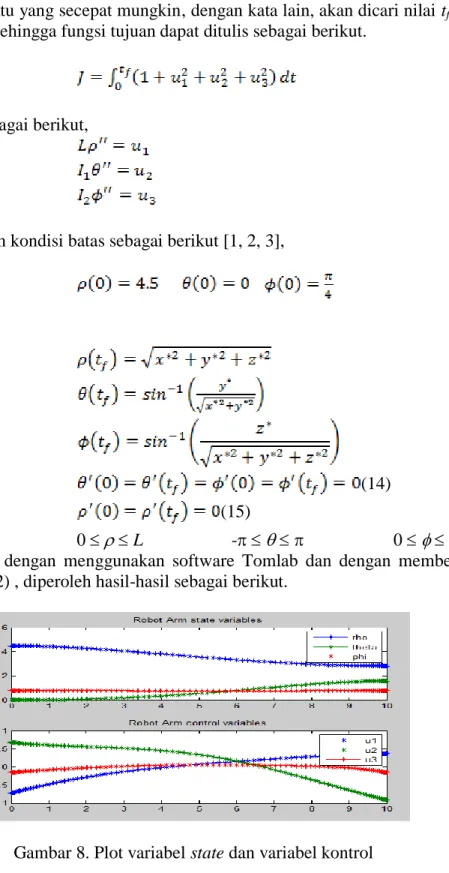
Selanjutnya, dengan menggunakan software Tomlab dan dengan memberikan input (x*, y*, z*) = (0, 2, 2) , diperoleh hasil-hasil sebagai berikut.
Gambar 8. Plot variabel state dan variabel kontrol
Pada Gambar 8 dapat dilihat bahwa variabel kontrol u1, u2, dan u3 yang berevolusi
secara mulus yang menggambarkan bahwa pergerakan polar robot akan berlangsung secara stabil dan mulus. Waktu minimum yang dibutuhkan untuk menggerakkan lengan robot dari posisi awal ke posisi objek adalah 9.9857 satuan waktu.
71 Gambar 9. Simulasi gerak lengan pada sumbu xyz
Pada Gambar 9 dapat dilihat bahwa lengan robot dapat bergerak dari posisi awal ke posisi akhir tepat pada objek. Path pergerakan lengan robot ditandai dengan garis merah dan objek yang ingin diambil ditandai dengan bintang merah seperti pada Gambar 10 dan Gambar 11. Gambar 10 merupakan simulasi pergerakan lengan robot yang dilihat dari arah samping (sumbu xz) dan Gambar 11 merupakan simulasi pergerakan lengan robot yang dilihat dari arah atas (sumbu xy).
Gambar 10. Simulasi gerak lengan pada sumbu xz
Gambar 11. Simulasi gerak lengan pada sumbu xy KESIMPULAN
Dari hasil penelitian dapat disimpulkan bahwa waktu minimum yang dibutuhkan lengan robot untuk bergerak dari posisi awal ke posisi akhir adalah 9,9857 satuan waktu. Hasil simulasi dan animasi menunjukkan bahwa nilai-nilai variabel state dan kontrol berevolusi secara mulus yang menggambarkan bahwa pergerakan polar robot akan berlangsung secara stabil dan mulus.
72 DAFTAR PUSTAKA
E. Dolan, J. J. Mor´e, and T. S. Munson. Benchmarking optimization software with cops 3.0. Technical Report ANL/MCS-273, Mathematics and Computer Science Division, Argonne National Laboratory, Argonne, IL, 2004.
Singh T, Singla P. Sequential Linear Programming for Design of Time-Optimal Controllers. In Decision and Control, 2007 46th IEEE Conference on 2007 Dec 12 (pp. 4755-4760). IEEE.
Bondarenko A, Bortz DM, More JJ. A Collection of Large-Scale Nonlinearly Constrained Optimization Test Problems. Argonne National Laboratory Research Report. 1998 Aug 20; 16.
Spong MW, Hutchinson S, Vidyasagar M. Robot Modeling and Control. New York: Wiley; 2006.