4
BAB II
DASAR TEORI
2.1 Roda Gigi
Roda gigi digunakan untuk mentransmisikan daya besar dan putaran yang tepat. Roda gigi memiliki gigi di sekelilingnya, sehingga penerusan daya dilakukan oleh gigi-gigi kedua roda yang saling berkait. Roda gigi sering digunakan karena dapat meneruskan putaran dan daya yang lebih bervariasi dan lebih kompak daripada menggunakan alat transmisi yang lainnya, selain itu roda gigi juga memiliki beberapa kelebihan jika dibandingkan dengan alat transmisi lainnya, yaitu :
Sistem transmisinya lebih ringkas, putaran lebih tinggi dan daya yang besar.
Sistem yang kompak sehingga konstruksinya sederhana. Kemampuan menerima beban lebih tinggi.
Efisiensi pemindahan dayanya tinggi karena faktor terjadinya slip sangat kecil.
Kecepatan transmisi rodagigi dapat ditentukan sehingga dapat digunakan dengan pengukuran yang kecil dan daya yang besar.
Roda gigi harus mempunyai perbandingan kecepatan sudut tetap antara dua poros. Di samping itu terdapat pula roda gigi yang perbandingan kecepatan sudutnya dapat bervariasi. Ada pula roda gigi dengan putaran yang terputus-putus.Dalam teori, roda gigi pada umumnya dianggap sebagai benda kaku yang hampir tidak mengalami perubahan bentuk dalam jangka waktu lama.
2.1.1 Klasifikasi Roda Gigi
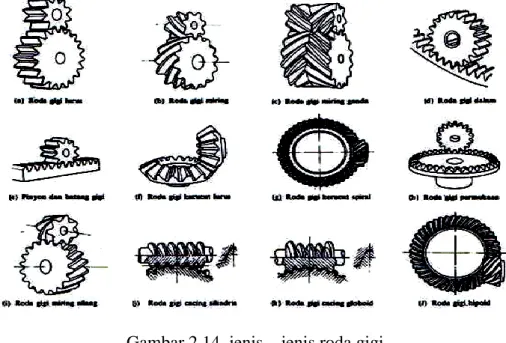
Menurut letak poros, arah putaran dan bentuk jalur gigi, roda gigi diklasifikasikan menjadi tiga yaitu :
1. Roda Gigi Dengan Poros Sejajar.
Adalah roda gigi di mana giginya berjajar pada dua bidang silinder (jarak bagi lingkaran), kedua bidang tersebut bersinggungan dan yang satu menggelinding pada yang lain dengan sumbu yang tetap sejajar.
a. Roda Gigi Lurus
Roda gigi lurus merupakan roda gigi paling dasar dengan jalur gigi yang sejajar poros. Pembuatannya paling mudah, tetapi menghasilkan gaya aksial sehingga cocok dipilih untuk gaya keliling besar. Roda gigi lurus memiliki sifat bising pada putaran tinggi. Dapat di lihat pada Gambar 2.1.
Gambar 2.1 Roda gigi lurus b. Roda Gigi Miring
Roda gigi miring mempunyai jalur gigi yang membentuk ulir pada jarak bagi lingkar. Pada roda gigi miring, jumlah pasangan gigi saling membuat perbandingan kontak yang lebih besar dari pada roda gigi lurus, sehingga pemindahan putaran dapat berlangsung dengan halus, sangat cocok untuk mentransmisikan putaran tinggi dan beban besar.
Roda gigi miring memerlukan kotak roda gigi yang lebih kokoh, karena jalur gigi yang berbentuk ulir tersebut menimbulkan gaya reaksi yang sejajar dengan poros, seperti yang terlihat pada Gambar 2.2.
c. Roda Gigi Miring Ganda.
Roda gigi miring ganda mempunyai jalur gigi yang membentuk ulir pada jarak bagi lingkar yang lebih luas dari pada gigi lurus. Roda gigi ini dapat memindahkan perbandingan reduksi, kecepatan keliling dan daya yang besar, tetapi pembuatannya agak sukar, seperti terlihat pada Gambar 2.3.
Gambar 2.3 : Roda gigi miring ganda. d. Roda Gigi Dalam.
Roda gigi dalam dipakai jika diinginkan alat transmisi dengan ukuran kecil, dengan perbandingan reduksi besar karena pinyon terletak di dalam roda gigi. Baik untuk mentransmisikan putaran dengan ruduksi yang besar, seperti pada Gambar 2.4.
e. Pinion dan Batang Bergigi.
Pasangan antara batang bergigi dan pinion di gunakan untuk merubah gerakan putaran menjadi gerak lurus atau sebaliknya gerak lurus menjadi gerak putar, seperti pada Gambar 2.5.
Gambar 2.5 : Pinyon dan batang bergigi. 2 Roda Gigi Dengan Sumbu Berpotongan.
Bentuk dasarnya adalah dua buah kerucut dengan puncak gabungan yang saling menyinggung menuru sebuah garis lurus.
a. Roda Gigi Kerucut Lurus.
Roda gigi kerucut lurus dengan gigi lurus adalah yang paling banyak di buat dan paling sering digunakan tetapi sangat berisik karena perbandingan kontaknya yang kecil. Konstruksi tidak memungkinkan pemasangan bantalan pada kedua ujung poros – porosnya, seperti pada Gambar 2.6.
b. Roda Gigi Kerucut Spiral.
Roda gigi kerucut spiral mempunyai perbandingan kontak yang lebih besar dari pada roda gigi kerucut lurus, sehingga dapat meneruskan putaran tinggi dan beban besar. Sudut poros roda gigi kerucut spiral biasanya di buat 90 Derajat, seperti pada Gambar 2.7.
Gambar 2.7 : Roda gigi kerucut spiral.
c Roda Gigi Permukaan.
Roda gigi permukaan cocok untuk memindahkan daya besar, namun berisik pada putaran tinggi karena perbandingan kontaknya yang kecil, lihat Gambar 2.10.
Gambar 2.8 : Roda gigi permukaan.
3 Roda Gigi Poros Bersilang.
Bentuk dasarnya ialah dua buah silinder atau kerucut yang letak porosnya saling bersilangan satu sama lain.
a. Roda Gigi Miring Silang.
Roda gigi miring silang mempunyai perbandingan bidang kontak yang besar sehingga cocok mentransmisikan putaran tinggi, lihat pada Gambar 2.9
Gambar 2.9 : Roda gigi miring bersilang.
b. Roda Gigi Cacing Silindris.
Roda gigi cacing silindris dapat meneruskan putaran dengan perbandingan reduksi yang besar namun berisik pada putaran tinggi, lihat pada Gambar 2.10.
c. Roda Gigi Cacing Globoid.
Roda gigi cacing globoid dapat meneruskan putaran dengan perbandingan reduksi yang besar dan mampu mentransmisikan daya yang lebih besar bila di bandingkan dengan roda gigi cacing silindris karena roda gigi cacing globoid mempunyai perbandingan kontak yang lebih besar, seperti pada Gambar 2.11.
Gambar 2.11 : Roda gigi cacing globoid.
d. Roda Gigi Hipoid.
Roda gigi hipoid mempunyai jalur gigi yang berbentuk spiral pada bidang kerucut yang sumbunya bersilang dan pemindahan daya pada permukaan gigi berlangsung secara meluncur dan menggelinding, lihat pada Gambar 2.12.
2.1.2 Nama – Nama Bagian Roda Gigi.
Nama – nama bagian roda gigi dapat dilihat pada Gambar 2.6 di bawah ini, sedangkan ukuran gigi dinyatakan dengan “ Jarak Bagi Lingkar “, jarak sepanjang lingkaran jarak bagi antara profil dua gigi yang berdekatan.
Jika jarak lingkaran bagi dinyatakan dengan d (mm), dan jumlah gigi z, maka jarak bagi lingkar t (mm) dapat ditulis sebagai berikut :
𝑡 =
π .dz ……….. ( 2 . 1 )
Jadi, jarak bagi lingkar adalah keliling lingkaran jarak bagi dibagi dengan jumlah gigi.
Dengan demikian ukuran gigi dapat ditentukan dari besarnya jarak bagi lingkar tersebut. Namun, karena jarak bagi lingkar selalu mengandung faktor Π, pemakaianya sebagai ukuran gigi kurang praktis. Untuk mengatasi hal ini, diambil ukuran yang di sebut “modul“ dengan lambang m, di mana :
m = z d
……….. ( 2 . 2 )
Gambar 2.13 : Bagian – bagian roda gigi.
Dengan cara ini, maka dapat ditentukan sebagai bilangan bulat atau bilangan pecahan yang lebih praktis. Maka modul dapat menjadi ukuran gigi.
Keterangan gambar :
1. Lingkaran jarak bagi (Pitch circle) yaitu lingkaran imajiner yang dapat memberikan gerakan yang sama seperti roda gigi sebenarnya.
2. Tinggi Kepala (Addendum) yaitu jarak radial gigi dari lingkaran jarak bagi ke puncak kepala.
3. Tinggi kaki (Dedendum) yaitu jarak radial gigi dari lingkaran jarak bagi ke dasar kaki.
4. Lingkaran kepala (Addendum circle) yaitu gambaran lingkaran yang melalui puncak kepala dan sepusat dengan lingkaran jarak bagi.
5. Lingkaran kaki (Dedendum circle) yaitu gambaran lingkaran yang melalui dasar kaki dan sepusat dengan lingkaran jarak bagi.
6. Lebar gigi (Tooth space) yaitu sela antara dua gigi yang saling berdekatan. 7. Tebal gigi (Tooth thickness) yaitu lebar gigi antara dua sisi gigi yang
berdekatan.
8. Sisi kepala (Face of the tooth) yaitu permukaan gigi di atas lingkaran jarak bagi. 9. Sisi kaki (Flank of the tooth) yaitu permukaan gigi di bawah lingkaran jarak
bagi.
10. Lebar gigi (Face width) yaitu lebar gigi pada roda gigi secara paralel pada sumbunya.
2.1.3 Rumus yang digunakan untuk perhitungan roda gigi lurus yaitu : a. Perbandingan putaran transmisi (speed ratio), dinyatakan dalam notasi : i .
Speed ratio : i = n1 / n2 = d2 / d1 = z2 / z1 …………(2.1)
Apabila:i < 1 = transmisi roda gigi inkrisi i > 1 = transmisi roda gigi reduksi
b. Jumlah roda gigi
Z = m D
………... ( 2 . 2 )
Di mana :
Z = Jumlah gigi pada roda gigi (buah).
D = Diameter jarak bagi (mm).
m = Modul gigi (mm).
Harga modul diambil dari tabel harga modul standar JIS B 1701 – 1973 (Buku Sularso, 1983, hal 216).
c. Diameter lingkaran kepala
Dk =
Z 2
m ……….... ( 2 .3 ) Di mana :d. Diameter lingkaran kaki
Dg = Z mcos ……… ( 2 .4 )
Di mana :
Dg = Diameter lingkaran kaki (mm).
α = Sudut tekan (Derajat).
e. Kecepatan keliling V = 1000 60 D n ……… ( 2 .5 ) Di mana :
V = Kecapatan keliling untuk tiap roda gigi (m/s).
D = Diameter jarak bagi untuk tiap roda gigi (mm).
n = Putaran poros (rpm). f. Gaya tangensial Ft = V Pd 102 ……… ( 2 .6 ) Di mana : Ft = Gaya tangensial (kg). Pd = daya rencana (kW).
Setelah itu kita dapat melakukan perhitungan beban lentur, dalam perhitungan beban lentur ini perlu diketahui faktor bentuk gigi (Y) yang diperoleh dari tabel faktor bentuk gigi ( Sularso, 1983 ) yang merupakan harga untuk profil gigi standar dengan sudut 200.
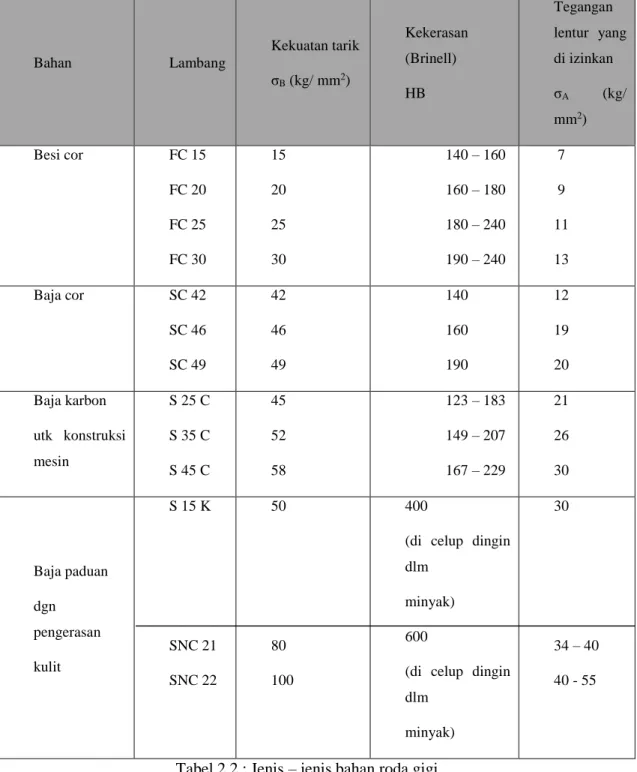
Bahan untuk kontruksi roda gigi dapat di lihat pada ( Tabel 2.1 ).
Tabel 2.2 : Jenis – jenis bahan roda gigi.
Sumber : Sularso dan Kiyatkatshu Saga, Dasar-dasar perencanaan dan pemeliharaan elemen mesin (Lit 1 hal. 241)
Bahan Lambang Kekuatan tarik σB (kg/ mm2) Kekerasan (Brinell) HB Tegangan lentur yang di izinkan σA (kg/ mm2) Besi cor FC 15 FC 20 FC 25 FC 30 15 20 25 30 140 – 160 160 – 180 180 – 240 190 – 240 7 9 11 13 Baja cor SC 42 SC 46 SC 49 42 46 49 140 160 190 12 19 20 Baja karbon utk konstruksi mesin S 25 C S 35 C S 45 C 45 52 58 123 – 183 149 – 207 167 – 229 21 26 30 Baja paduan dgn pengerasan kulit S 15 K SNC 21 SNC 22 50 80 100 400
(di celup dingin dlm
minyak) 600
(di celup dingin dlm
minyak)
30
34 – 40 40 - 55
g. Beban lentur
Fb =
a mYFv ……….………. ( 2 .7 ) Di mana :Fb = Beban lentur (kg/mm).
a
= Tegangan lentur yang diizinkan (kg/mm2).Y = Faktor bentuk gigi.
Fv = Faktor dinamis.
Sedangkan harga faktor dinamis diambil dari tabel faktor dinamis ( Sularso, 1983 ), di mana harganya ditentukan berdasarkan tingkat kecepatan pada tiap roda gigi, di mana untuk kecepatan rendah dapat menggunakan rumus
( Pers. 2 . 18 ) di bawah ini :
Tabel 2.2 Faktor dinamis (fv) yang digunakan yang digunakan :
Kecepatan V (m/s) fv Kecepatan rendah 0,5 – 10 v 3 3 Kecepatan sedang 5 – 20 v 6 6 Kecepatan tinggi 20 – 50 v 5 , 5 5 , 5
Sumber : Sularso dan Kiyatkatshu Saga, Dasar-dasar perencanaan dan pemeliharaan elemen mesin (Lit 1 hal. 240)
h Lebar gigi b = Fb Ft ………. ( 2 .9 ) Di mana : b = Lebar gigi (mm). Ft = Gaya tangensial (kg). Fb = Beban lentur (kg/mm).
Dan untuk mencari diameter lingkaran jarak bagi yang sebenarnya adalah :
D = Z m ……….……… ( 2 . 10 )
2.1.4 Rumus untuk menghitung roda gigi miring yaitu :
a. Mencari nilai Torsi ( T ) 𝑇 =P . 60
2πNp ……….……… ( 2 . 11 )
Dimana :
T = Torsi (N.mm)
P = Daya motor (watt) Np = Putaran motor (Rpm)
b. Angka gigi equivalent ( Te) 𝑇𝑒 = Tp
cos 𝛼3 ……….……… ( 2 . 12 )
Dimana :
Tp = Jumlah gigi pinion
c. Faktor lewis ( Y’ ) 𝑌′ = 0,154 −0,912 𝑇𝑒 ……….……… ( 2 . 13 ) (Khurmi, R.S., 2005) d. Gaya Tangensial ( Wt) 𝑊𝑡 = 2𝑇 𝐷𝑝 ……….……… ( 2 . 14 ) 𝑤𝑡 = ( 𝜎˳ . 𝑐𝑣 )𝑏. 𝜋. 𝑚. 𝑌′ ……….……… ( 2 . 15 ) Dimana : T = Torsi ( N.mm ) Dp = Diameter pinion ( mm ) 𝜎˳ = Tegangan statis ( kg/mm2) 𝑐𝑣 = Faktor kecepatan
𝑏 = lebar roda gigi ( mm ) 𝑚 = modul roda gigi ( mm )
𝑌′ = faktor lewis
e. Kecepatan Roda gigi ( v )
𝑣 = 𝜋. 𝐷𝑝 . 𝑁𝑝 ……….……… ( 2 . 16 ) Dimana : Dp = Diameter pinion ( mm ) Np = Putaran pinion ( Rpm ) f. Faktor kecepatan ( Cv ) 𝑐𝑣 = 6 6+v ……….……… ( 2 . 17 )
Tabel 2.3 Faktor dinamis (fv) yang digunakan yang digunakan : Kecepatan V (m/s) fv Kecepatan rendah 0,5 – 10 v 3 3 Kecepatan sedang 5 – 20 v 6 6 Kecepatan tinggi 20 – 50 v 5 , 5 5 , 5
Sumber : Sularso dan Kiyatkatshu Saga, Dasar-dasar perencanaan dan pemeliharaan elemen mesin (Lit 1 hal. 240)
g. Lebar gigi ( b ) b = 1,15 .π .m
tan 𝛼 ……….……… ( 2 . 18 )
Dimana :
m = modul roda gigi ( mm ) α = sudut miring ( ° )
h. Diameter Roda gigi (Dg)
Dg = m . Tp ……….……… ( 2 . 19 )
Dimana :
m = modul roda gigi ( mm ) Tp = Jumlah gigi pinion
i. Angka rasio roda gigi (i) I = n1
𝑛2 ……….……… ( 2 . 20 )
Dimana :
i = angka rasio gigi
n1 = putaran gigi 1 ( Rpm )
n2 = putaran gigi 2 ( Rpm )
Maka jumlah gigi gear besar ( Z2 )
Tg = I . Tp ……….……… ( 2 . 21 )
Dimana :
Tg = jumlah gigi gear
I = rasio gigi
Tp = jumlah gigi pinion
j. Gaya aksial ( Wa)
Wa = Wt tan α ……….……… ( 2 . 22 )
Dimana :
Wa = Gaya aksial ( Newton )
Wt = Gaya tangensial ( Newton )
k. Jarak Sumbu Poros ( a˳ ) a˳ = 𝑑1+𝑑2
2 ……….……… ( 2 . 23 )
Dimana :
a˳ = Jarak Sumbu Poros ( mm ) d1 = diameter roda gigi 1 ( mm )
l. Kelonggaran puncak ( Ck ) dan Co
Co = 0
Ck = 0,25 . m ……….……… ( 2 . 24 )
Dimana :
Co = jarak antar gigi ( mm )
Ck = kelonggaran puncak ( mm )
m. Diameter kepala ( dk1 & dk2)
dk1 = ( Tp + 2 ) . m ……….……… ( 2 . 25 )
Dimana :
dk1 = Diameter kepala ( mm )
Tp = jumlah gigi pinion ( mm )
m = modul gigi ( mm )
n. Diameter kaki (df1 & df2 ) dan H (kedalaman pemotongan)
df1 = ( Tp – 2 ) . m – 2 . Ck ……….……… ( 2 . 26 )
Dimana :
df1 = diameter kaki ( mm )
Tp = jumlah gigi pinion ( mm )
m = modul gigi ( mm ) Ck = kelonggaran puncak ( mm ) H = 2m + Ck ……….……… ( 2 . 27 ) Dimana : H = kedalaman pemotongan ( mm ) m = modul gigi ( mm ) Ck = kelonggaran puncak ( mm )
o. Faktor bentuk gigi
( lihat pada tabel Sularso dan Kiyatkatshu Saga, Dasar-dasar perencanaan dan pemeliharaan elemen mesin )
p. Tebal antara dasar alur pasak dan dasar kaki gigi (Sk2)
Rencana untuk ukuran pasak : 6 mm x 7 mm t1 = 3 mm t2 = 4 mm
Sk2 = (df2/2 ) – { ( ds2/2) + t2 } ……….……… ( 2 . 28 )
Dimana :
Sk2 = Tebal antara dasar alur pasak dan dasar kaki gigi ( mm )
df2 = diameter kaki ( mm )
ds2 = diameter poros ( mm )
FLOW CHART
MERANCANG RODA GIGI MIRING
Tidak memenuhi
P = watt Np = Rpm Tp = jumlah gigi α = sudut miring Φ = sudut tekan Ng = Rpm
Menentukan nilai modul (m)
g. Lebar gigi ( b ) a. Mencari nilai Torsi ( T ) b. Angka gigi equivalent ( Te)
c. Faktor lewis ( Y’ ) d. Gaya Tangensial ( Wt)
e.
e. Kecepatan Roda gigi ( v ) f. Faktor kecepatan ( Cv ) g.
e h. Diameter Roda gigi (Dg) i. Angka rasio roda gigi (i) h.
j. Diameter Roda gigi besar ( Dp)
k. Gaya aksial ( Wa)
l.
l. Jarak Sumbu Poros ( a˳ ) m. Kelonggaran puncak ( Ck ) dan Co
mi.
r. Torsi (T) dan Diameter poros (ds1 & ds2)
p. Faktor bentuk gigi (Y) q. Desain Poros (Bahan Poros, Bahan
Pasak) (τa)
r.
n. Diameter kepala ( dk1 & dk2)
o. Diameter kaki (df1 & df2 ) dan H
(kedalaman pemotongan) p.
b/m = (6 – 10 ) (baik ) d/b = ≤ 1,5 (baik ) Sk2/b = ≥ 2,2 ( baik )
Data Hasil Perencanaan s. Tebal antara dasar alur
pasak dan dasar kaki gigi (Sk2)
Memenuhi/ tidak memenuhi syarat
FLOW CHART
MERANCANG RODA GIGI LURUS
Tidak memenuhi
P = watt Np = Rpm Tp = jumlah gigi α = 20°
Ng = Rpm a = jarak sumbu poros
a. Mencari nilai diameter sementara ( d’1 & d’2 )
c. Angka gigi equivalent ( Te) b. Menentukan nilai modul(m)(Tp &
Tg)
c. Diameter Roda Gigi ( d01 & d02 )
f. Gaya Tangensial ( Wt)
g.
d. Kelonggaran puncak ( Ck ) dan Co
e. Diameter kepala (dk) dan diameter
kaki (df)
h.
e
f. H (kedalaman pemotongan) g. Faktor bentuk gigi (Y)
i. h. Kecepatan Roda Gigi (v) & Gaya tangensial (Ft)
m. Gaya aksial ( Wa)
n. i. Faktor dinamis (fv)
j. Kekuatan Bahan Pinyon dan Gear
Kelonggaran puncak ( Ck ) dan Co
mii.
n. Torsi (T) dan Diameter poros (ds1 & ds2)
l. Lebar Roda Gigi (b) m. Desain Poros (Bahan Poros, Bahan
Pasak) (τa)
n.
k. Beban lentur (Fb1) dan beban
permukaan (Fb2) yang di ijinkan per
satuan lebar, F’H / Fmin
b/m = (6 – 10 ) (baik ) d/b = ≤ 1,5 (baik ) Sk2/b = ≥ 2,2 ( baik )
Data Hasil Perencanaan o. Tebal antara dasar alur
pasak dan dasar kaki gigi (Sk2)
Memenuhi/ tidak memenuhi syarat
2.2 Poros
Poros merupakan bagian yang berputar, dimana terpasang elemen pemindah gaya, seperti roda gigi, bantalan dan lain-lain. Poros bisa menerima beban-beban tarikan, lenturan, tekan atau puntiran yang bekerja sendiri-sendiri maupun gabungan satu dengan yang lainnya. Kata poros mencakup beberapa variasi seperti shaft atau axle (as). Shaft merupakan poros yang berputar dimana akan menerima beban puntir (Khurmi, R.S., 2005).
Jenis poros yang lain adalah jenis poros transmisi. Poros ini akan mentransmisikan daya meliputi kopling, roda gigi, puli, sabuk, atau sproket rantai dan lain-lain. Poros jenis ini memperoleh beban puntir murni atau puntir dan lentur. Daya yang besar mungkin diperlukan pada saat start atau beban yang besar terus bekerja setelah start. Dengan demikian seringkali diperlukan koreksi pada daya rata - rata yang diperlukan dengan menggunakan faktor koreksi perencanaan.(Sularso, 2002)
Untuk merencanakan suatu poros maka perlu memperhatikan hal-hal sebagai berikut:
1. Kekuatan poros.
Suatu poros transmisi dapat mengalami beban puntir atau gabungan antara puntir dan lentur, juga ada poros yang mendapatkan beban tarik atau tekan. Oleh karena itu, suatu poros harus direncanakan hingga cukup kuat untuk menahan beban-beban di atas.
2. Kekakuan poros.
Meskipun suatu poros mempunyai kekuatan cukup, tetapi jika lenturan puntirnya terlalu besar akan mengakibatkan ketidaktelitian atau getaran dan suara, karena itu disamping kekuatan poros, kekakuan juga harus diperhatikan dan disesuaikan dengan macam mesin yang akan dilayani poros tersebut.
3. Korosi.
Apabila terjadi kontak langsung antara poros dengan fluida yang korosif maka perlu diadakan perlindungan terhadap poros supaya tidak terjadi korosi yang dapat menyebabkan kekuatan poros menjadi berkurang. 4. Bahan poros.
Poros yang digunakan untuk putaran yang tinggi dan beban yang berat pada umumnya dibuat dari baja paduan (alloy steel) dengan proses pengerasan (case hardening).
Rumus yang digunakan dalam perhitungan poros yaitu: a. Daya rencana P f Pd c ... (2.29) Dimana : Pd = Daya rencana (KW) fc = Faktor koreksi
P = Daya nominal motor penggerak (KW)
Tabel 2.4 Faktor-faktor Koreksi Daya yang akan Ditransmisikan Daya yang akan ditransmisikan fc
Daya rata-rata yang diperlukan Daya maksimum yang diperlukan Daya nominal
1,2 – 2,0 0.8 – 1,2 1,0 – 1,5 Sumber : Sularso, 2002
b. Torsi yang terjadi pada poros: 𝑇 = 9,74 𝑥 105 𝑃
𝑛2 ... (2.30)
Sumber: Sularso, 2002 Dimana:
T = Torsi pada poros (kg.mm) P = Daya (Kw)
n2 = Putaran poros (rpm)
c. Tegangan geser ijin
𝜏
𝑎= 𝜎𝐵𝑆𝑓1 .𝑆𝑓2
... (2.31)
Sumber: Sularso, 2002 Dimana:
τa = Tegangan geser ijin (Kg/mm2)
σB = Kekuatan tarik bahan (Kg/mm2)
Sf1 ,Sf2 = Faktor koreksi d. Diameter Poros Ds= 3 5,1 Ta xKtxCbxT ……… ( 2 .32 ) Di mana : s D = Diameter poros (mm).
Kt = Faktor koreksi momen puntir (1,0 – 1,5). Cb = Faktor koreksi akibat beban lentur (1,2 – 2,3).
2.3 Motor
Motor listrik adalah suatu komponen utama dari sebuah kontruksi permesinan yang berfungsi sebagai penggerak. Gerakan yang dihasilkan oleh motor adalah sebuah putaran poros. Komponen lain yang dihubungkan dengan poros motor adalah pulley atau roda gigi yang kemudian dihubungkan dengan sabuk atau rantai.
Motor listrik adalah motor yang berputar karena adanya sumber daya listrik yang menghidupkan stator electromotor sehingga menyebabkan terjadinya medan magnet dan memicu rotor untuk berputar. Sumber tenaga dari motor listrik adalah listrik dari PLN.
Crane Jalan Manual menggunakan motor listrik sebagai sumber tenaga. Pemilihan motor listrik sebagai sumber tenaga dikarenakan motor listrik memiliki beberapa kelebihan yaitu ; tidak menimbulkan kebisingan, tidak menimbulkan emisi, kontruksi sederhana, harga murah.
2.3.1 Daya Penggerak
Secara umum daya diartikan sebagai kemampuan yang dibutuhkan untuk melakukan kerja, yang dinyatakan dalam satuan Nm/s, Watt, ataupun HP. Untuk menentukan harga daya perlu memperhatikan beberapa hal yang mempengaruhinya, diantaranya adalah harga gaya, torsi, kecepatan putar dan berat yang bekerja pada mekanisme tersebut.
Berikut adalah rumus untuk mencari harga daya, gaya, torsi, kecepatan putar dan berat.
a. Mencari harga daya (P)
Berdasarkan besar usaha atau energi tiap satuan waktu, daya dapat dirumuskan: t w P ... (2.33) Sumber: R.S Khurmi, 1979 Di mana : P = Daya (watt) w = Usaha (joule) t = Waktu (second)
Berdasarkan gaya yang bekerja dan kecepatan, maka daya dapat dihitung dengan rumus: P = F . V ... (2.34) Sumber: R.S Khurmi, 1979 Di mana: P = daya (Watt) F = gaya (N) V = kecepatan linier (m/s)
Berdasarkan torsi yang bekerja:
P = T . ω ... (2.35) Sumber: R.S Khurmi, 1979 60 . . 2 n ... (2.36) Sumber: R.S Khurmi, 1979 T = I . α ... (2.37) Sumber: R.S Khurmi, 1979 Di mana: T = Torsi (N.m)
ώ = Kecepatan Sudut (Rad/s) I = Momen inersia (kg.m³) α = Percepatan sudut ( Rad/det² )
Berdasarkan putaran poros: 60 . . 2 nT P ... (2.38) Sumber: R.S Khurmi, 1979 Di mana: n = Putaran poros (rpm) T = Torsi (kg.m) P = Daya (watt)
b. Mencari harga gaya (F)
Gaya adalah suatu besaran yang menyebabkan benda bergerak. F = m . a ... (2.39) Sumber: R.S Khurmi, 1979 Di mana: F = Gaya ( N atau kg.m/s2) m = Massa (kg). a = percepatan (m/s2).
Mencari harga berat ( W )
Berat suatu benda adalah gaya gravitasi yang bekerja pada benda itu. W = m . g ... (2.40) Sumber: R.S Khurmi, 1979 Di mana: W = berat (N atau kg.m/s2). m = massa (kg). g = percepatan gravitasi (10 m/s2).
c Mencari harga torsi ( T )
Besarnya torsi merupakan hasil perkalian gaya dengan jarak terhadap sumbu: T = F . r ... (2.41) Sumber: R.S Khurmi, 1979 Di mana: T : torsi (N.m) F : gaya (N)
r : jarak terhadap sumbu (m)
2.4 Roda Penggerak
Roda Penggerak untuk monorel.Roda yang berjalan pada flens diatas batang -I dipakai untuk troli yang digerakan tangan atau dengan motor listrik,roda penggerak di cor bersama roda giginya.Biasanya roda penggerak dipasang bebas pada as yang diikat pada pelat sisi troli dan berputar pada bus perunggu atau bantalan rol.Pelat sisi truk akan mengalami tarikan dan lengkung,untuk itu harus dibuat kuat.
Desain Roda Penggerak. Roda penggerak diperiksa terhadap kekuatan dan keausannya, menurut teori tegangan kontak ,menurut urutan berikut.
a. Untuk roda dengan perubahan gelinding pararel yang bergerak pada rel dengan permukaan rata :
1) Untuk roda baja
σ1 maks = 600√𝑝𝑘𝑏𝑟 kg/cm2 ……….. (2.42)
2) Untuk roda besi tuang (besi tuang C4 35-56 )
σ1 maks = 400√𝑝𝑘𝑏𝑟 kg/cm2 ……….. (2.43)
p = beban yang bekerja pada roda , dalam kg b = lebar permukaan kerja rel rata, dalam cm. r = jari-jari permukaan rel, dalam cm
k = koefisien untuk memperhitungkan kecepatan gelinding roda yang ditentukan dari rumus k = ( 1‒ 0,2 ) v dengan v ialah kecepatan gelinding roda, dalam m/detik.
Menentukan beban roda, Pmaks = 𝑄 + 𝐺0 4 ………(2.44) Dimana : Q = bobot beban 𝐺0= bobot troli