RANCANG BANGUN MOBILE ROBOT 2WD
DENGAN 2 SENSOR HC-SRF05 UNTUK
MENENTUKAN ARAH BELOKAN
Nuryanto
1), Andi Widiyanto
2)1), 2)Teknik Informatika Universitas Muhammadiyah Magelang
Jl. Mayjend Bambang Soegeng km.05 Mertoyudan, Magelang 56172 Email :[email protected]), [email protected]2)
Abstrak
Robot yang dapat bergerak (mobile robot) dibutuhkan untuk pengamatan dalam keadaan yang sulit dilakukan oleh manusia seperti suhu ekstrem, sempit, gelap dan sebagainya. Robot yang dibutuhkan dapat bergerak sendiri dan dapat menghindari halangan serta dilengkapi dengan kamera dan lampu penerangan. Implementasi alat dilakukan melalui eksperimen di laboratorium. Mekanisme gerak meniru pada traktor yang digunakan untuk membajak sawah. Two-Wheel Drive (2WD) memerlukan freewheel untuk mekanisme belok. Untuk menentukan arah belokan berdasarkan data pengukuran dari sensor ultrasonic HC-SR05, kemudian Arduino akan mengatur kecepatan motor DC kiri dan kanan untuk menghasilkan belokan. Untuk kamera menggunakan kamera smartphone android yang difungsikan sebagai IP Cam, supaya dapat dilihat melalui PC atau smartphone yang terhubung pada jaringan yang sama.
Hasil pengujian menunjukkan mobile robot dapat bergerak sendiri dan mampu menghindari halangan. Saat robot mobile terjebak ditengah dengan halangan kiri-kanan-depan (membentuk huruf U), untuk keluar membutuhkan waktu yang cukup lama.
Kata kunci: Mobile robot, Arduino, android, 2WD, Ultrasonic.
1. Pendahuluan
Direktorat Jenderal Pendidikan Tinggi (Dirjen DIKTI) setiap tahun menyelenggarakan kontes [1]. Robot tersebut dapat bergerak di sekitar lingkungan dan tidak menetap pada satu lokasi fisik dengan menggunakan navigasi dari sensor dengan pergerakan menggunakan kaki atau roda disebut Mobile robot [2].
Robot yang dapat bergerak dibutuhkan untuk pengamatan dalam keadaan yang sulit dilakukan oleh manusia seperti suhu ekstrem, sempit, gelap dan sebagainya. Robot yang dibutuhkan dapat bergerak sendiri dan dapat menghindari halangan serta dilengkapi dengan kamera dan lampu penerangan.
Menghindari tabrakan (obstacle avoidance) adalah hal utama yang menjadi perhatian utama mobile robot dalam pergerakannya. Pada perlombaan robot, kondisi lingkungan sudah didesain sedemikian rupa, sehingga
salah satu cara yang bisa diterapkan adalah dengan mengikuti sisi dinding yaitu left wall following (mengikuti dinding kiri) dan Right wall following (Mengikuti dinding Kanan) [3] dan Proportional
Integral Differential (PID) Control [4].
Metode wall following menjadi tidak tepat jika digunakan untuk robot yang bergerak tanpa menyusuri tembok. Penelitian ini akan menghasilkan prototype robot yang bergerak tidak menurut arah tertentu, akan tetapi bergerak bebas menghindari halangan yang digunakan untuk mengamati keadaan lingkungan melalui kamera. Arah gerakan robot maju dengan konsep belokan berdasarkan masukan dari 2 sensor ultrasonic yang dipasang di depan. Konsep dasar robot ini bergerak maju terus jika ada halangan didepannya akan berbelok kekanan atau kekiri berdasarkan masukan dari sensor ultrasonic atau bahkan mundur jika jarak sangat dekat kemudian baru akan berbelok ke kanan atau ke kiri. 2. Pembahasan
Pada penelitian ini memerlukan hardware dan software yang digunakan dalam proses pembuatan mobile robot perincian sebagai berikut:
a. Arduino Mega 2560 b. HC-05 bluetooth c. L298N driver modul
d. HY SRF05 modul ultrasound sensor e. Motor DC beserta roda
f. Freewheel g. 16x2 LCD
h. Project board mini 400 point i. Android smartphone Redmi 2 j. Laptop dengan Ubuntu OS k. Arduino-1.6.3
l. Bluetooth RC Controller_1.6 m. IP webcam
n. Battery 1500mAh 3,7V
Arduino Mega 2560 adalah microcontroller yang memiliki jumlah pin yang benyak sehingga dapat dipasangi banyak modul, sensor seperti L298N driver modul, HC-05, LCD dan perlatan yang lain. Untuk memprogram arduino menggunakan aplikasi arduino-1.6.3 pada laptop dengan Linux OS supaya lebih cepat proses deteksi port.
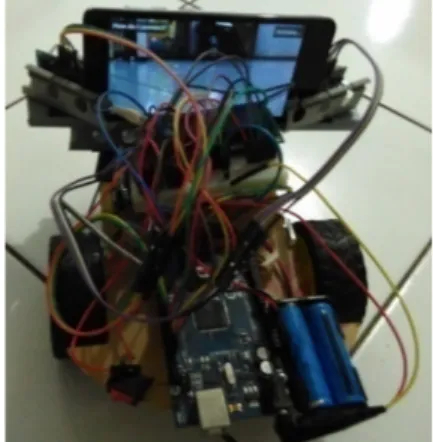
Samrtphone digunakan untuk seting kecepatan robot dan mengaktifkannya dengan aplikasi Bluetooth RC Controller_1.6 melalui koneksi bluetooth. Untuk memonitor gambar visual menggunakan smartphone android yang telah terpasang aplikasi IP Webcam seperti pada gambar 1.
Gambar 1. Prototype mobile robot
Aplikasi bluetooth RC Controller dari smartphone digunakan untuk menentukan kecepatan dan menyalakan mobile robot melalui koneksi bluetooth. Sensor ultrasonic akan mengirimkan perkiraan jarak yang akan diproses arduino untuk menentukan gerak mobile robot. Aplikasi IP webcam menggunakan smartphone yang dipasang pada bagian depan mobile robot untuk menangkap gambar. Browser pada laptop atau
smartphone digunakan untuk membuka gambar yang
dikirim melalui koneksi Wifi. Skema pemasangan peralatan seperti gambar 2
Gambar 2. Skema mobile robot
Project board mini digunakan untuk memasang LCD sekaligus digunakan untuk port arus 5V dari arduino yang dihubungkan dengan semua sensor dan modul. HC-05 bluetooth dihub dengan pin digital arduino 30 & 31, LCD dengan pin 8,9,10,11,12,13. Port output L298N driver modul dihubungkan dengan motor DC kanan &
kiri sedangkan port input dihubungkan dengan pin arduino 33,35,37,39 serta pin 5V dan kutub positif dari battery. Sensor SRF-05 kanan dihubungkan dengan pin 4, 5 sedangkan SRF-05 kiri dengan pin 7, 6. Secara terperinci sambungan antar pin seperti pada tabel 1. Tabel 1.Tabel sambungan pin arduino
Perangkat Pin Pin
Arduino Keterangan LCD 16x2 1,3 Kutub
min - Project boarddigunakan untuk memudahkan pemasangan 2 Kutub + 5V 4,6,11,12, 13,14 8,9,10,11,12,13 HY
SRF-05 VCC Kutub+ 5V Trig dan EchoSRF-05 kiri 6,7 dan kanan 5,4 dan kutub + - pada project board Trig 6 / 5 Echo 7 / 4 GND Kutub -OUT None HC-05 bluetooth RXDTXD 3031 -GND Kutub -VCC Kutub + 5V EN + STATE None L298N driver modul
IN1 33 Kutub motor
dan OUT harus sama antara kanan dan kiri supaya putaran kiri kanan searah IN2 35 IN3 37 IN4 39 5V Kutub + 5V 12V Kutub + battery GND Kutub -OUT1,2 Motor DC 1 OUT3,4 Motor DC 2
Mobile robot ini sebenarnya mengunakan daya 12V DC untuk menggerakkan motor DC, akan tetapi dalam peneliian ini menggunakan 2 buah battery 3,7 V. Microcontroller Arduino bekerja pada arus 5V, sehingga membutuhkan L298N driver modul. Arah putaran motor DC akan berubah jika kutub arusnya ditukar. Untuk mengatur gerakan maju atau mundur dilakukan dengan menukar muatan arus pada OUT1 dengan OUT2 dan OUT3 dengan OUT4 pada LN298N.
Setelah semua perangkat terhubung melalui kabel, proses selanjutnya inisialisasi pin Arduino dengan sensor, modul dan perangkat lainnya seperti pada gambar 3 LCD 16x2 L298N HC-05 HY SRF05 & smartphone Arduino Mega 2560 Android Smartphone
Gambar 3. Pengaturan pin arduino dengan modul & sensor
Algoritma gerakan mobile robot konsep gerakan modifikasi dari penelitian Rahman, A. (2007) [5] yang membuat Fire Fighting Mobile Robot dengan Four Wheel Drive (4WD), sedangkan penelitian ini menggunakan 2 Wheel Drive (2WD). Proses pairing dari android akan mengaktifkan robot mobil dan kecepatan yang disetting dari smartphone seperti flowchart pada gambar 4.
Gambar 4. Flowchart kontrol mobile robot Untuk memperkirakan jarak halangan menggunakan
library arduino yaitu newping.h dengan perhitungan
lebih baik (http://code.google.com/p/arduino-new-ping/)
kemudian dipasang pada Arduino_1.6.3 dengan menggunakan rumus (1) untuk ukuran cm dibawah ini :
jarak = sonar.ping() / US_ROUNDTRIP_CM ...(1) dimana sonar adalah sebuah class NewPing yang memperoleh data dari sensor ultrasonic dengan perintah (2) dibawah ini:
NewPing sonar(TRIG, ECHO, MAX) ...(2) TRIG & ECHO adalah data yang berasal dari sensor ultrasonic dan MAX adalah jarak jangkauan maksimal sensor ultrasonic yang ditentukan.
Pengujian dilakukan dengan membandingkan hasil pengukuran sensor dengan menggunakan penggaris menghasilkan pengukuran yang sama seperti gambar 5.
Gambar 5. Pengujian perkiraan jarak
Mekanisme gerak meniru pada traktor yang digunakan untuk membajak sawah. Jika diamati traktor akan berjalan maju jika roda kanan kiri berputar kedepan. Untuk belok ke kanan maka kopling kanan di tekan sehingga roda kanan berhenti dan roda kiri tetap berputar. Belok ke kiri dengan mekanisme sebaliknya. Pada robot ini menggunakan freewheel sebagai tumpuan dalam proses belok seperti gambar 6.
Gambar 6. Rancangan roda gerak mobile robot
Proses Pairing START Kecepatan Ada halangan ? mundur senA < 10 || senB < 10 ? kanan senA > senB ? kiri maju STOP freewheel motor DC 2 Roda 2 roda 1 motor DC 1
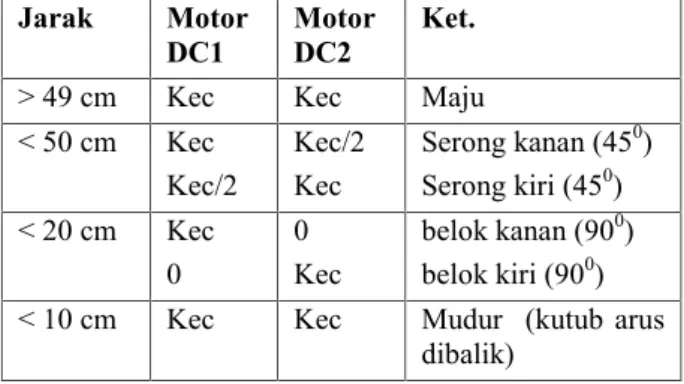
Gerakan robot dikendalikan dengan mengatur kecepatan motor DC. Robot akan berjalan maju terus jika sensor mendeteksi ada halangan akan dibandingkan antara sensor kanan dan sensor kiri untuk menentukan belok kanan atau kiri. Sudut belokan 450jika jarak kurang 50
cm dan belok 900 jika jarak kurang 20. Pada saat
halangan kurang dari 10 cm, maka robot akan mundur dengan mengatur kecepatan motor DC. dengan pengaturan seperti tabel 2.
Tabel 2.Tabel pengaturan kecepatan motor untuk belok
Jarak Motor
DC1 MotorDC2 Ket. > 49 cm Kec Kec Maju < 50 cm Kec Kec/2 Kec/2 Kec Serong kanan (450) Serong kiri (450) < 20 cm Kec 0 0 Kec belok kanan (900) belok kiri (900)
< 10 cm Kec Kec Mudur (kutub arus dibalik)
Implementasi program menggunaan arduino_1.6.3 yang telah terinstall pada laptop dengan Ubuntu 12.04 LTS. Menggunakan linux OS karena deteksi port & jenis microcontroller secara otomatis dan lebih cepat jika dibandingkan menggunakan Windows OS. Pemrograman dengan bahasa C seperti pada gambar 7.
Gambar 7. Implementasi program pada Arduino_1.6.3 Untuk pengamatan visual menggunakan smartphone android yang diinstall aplikasi IP Webcam. Saat aplikasi dijalankan maka smartphone menjadi server, sehingga semua perangkat seperti PC, laptop, smartphone yang terhubung pada jaringan wifi yang sama dapat menerima gambar dari kamera melalui browser seperti gambar 8.
Gambar 8. Capture gambar IP Webcam Salah satu kelebihan dari IP Webcam adalah dapat diatur kualitas gambar yang diinginkan bahkan dapat menghidupkan atau mematikan lampu flash kamera
smartphone. Hal ini diperlukan pada saat robot melalui
ruangan yang gelap.
Robot mobile pada awalnya di uji di ruangan terbuka dengan meletakkan berbagai barang seperti kardus komputer dan barang yang lain yang dikondisikan sedemikian rupa. Aplikasi RC Controller_1.6 pada smartphone android digunakan untuk mengaktifkan mobile robot melalui koneksi bluetooth. Proses pairing akan mengaktifkan robot akan tetapi robot belum bergerak. Setting kecepatan dari smartphone akan diterima HC-05 diproses oleh arduino untuk mengatur kecepatan sehingga mobile robot akan bergerak sesuai dengan settingan kecepatan.
Robot bergerak maju akan belok jika ada halangan didepannya atau akan menabrak tembok. Hasil pengamatan menunjukkan robot berjalan maju lurus ke depan dan berhasil menghindari halangan dengan berbelok serong jika benda didepannya kecil, dan akan berbelok tajam jika benda didepannya lebar seperti bagian tengah kardus. Pada saat mendekati dinding belok serong dan saat mendekati sudut ruangan akan berbelok tajam tanpa terjadi tabrakan.
Pengujian selanjutnya dilakukani pada ruangan kantor dengan kondisi dan aktivitas seperti biasa tanpa dikondisikan. Hasil pengamatan menunjukan tidak terjadi tabrakan walaupun berada dibawah meja atau pun kursi. Mobile robot bergerak ke segala arah karena belokan tergantung dari benda didepannya. Mobile robot mampu menghindar dan melewati sebelah kanan, kiri atau memutar pada posisi orang yang berdiri seperti gambar 9. Pada saat ada orang yang berjalan kearahnya dan akan terjadi tabrakan, robot akan mundur kemudian belok menghindar. Beberapa kali saat orang yang berjalan cepat dan tidak memperhatikan, robot sudah mundur akan tetapi tetap terjadi tabrakan.
Gambar 9. Menghindari orang yang berdiri Robot mengalami masalah ketika terjebak masuk pada sudut ruangan yang terdapat lemari loker yang membentuk huruf U yang sempit. Robot akan bergerak sedikit maju-mundur belok kanan-kiri dengan waktu yang cukup lama untuk keluar dari posisi itu tergantung lebar ruang yang tercipta. Jika lebar terlalu sempit dan robot terlanjur masuk lebih dalam akan mengalami kegagalan untuk keluar dan hanya bergerak sedikit terus menerus.
Pengamatan visual menggunakan kamera smartphone redmi 2 yang sudah cukup bagus dengan aplikasi IP webcam dipasang pada mobile robot dan menggunakan koneksi jaringan hotspot kampus. Hasil pengamatan dilihat melalui browser firefox 41.0.1 pada laptop dengan Ubuntu 12.04 LTS mode video render browser hasilnya cukup bagus.
3. Kesimpulan
Mobile robot yang dihasilkan penelitian ini dapat bergerak maju sendiri setelah diaktifkan melalui smartphone android dan mampu belok menghindari halangan berdasarkan data dari 2 buah sensor SRF-05 yang dipasang pada bagian depan. Robot akan berbelok serong atau belokan tajam berdasarkan dari masukan Jarak dari sensor.
Halangan yang berupa obyek bergerak masih terjadi tabrakan. Pada saat robot terjebak ditengah dengan halangan kiri-kanan-depan (membentuk huruf U), membutuhkan waktu yang lama untuk keluar.
Diperlukan penelitian lebih lanjut tentang kecepatan laju dengan jarak belok dan halangan obyek bergerak. Perbaikan algoritma saat terjebak dalam halangan yang membentuk huruf U
Daftar Pustaka
[1] DIKTI, Panduan Kontes Robot Pemadam Api Indonesia 2013. Jakarta: DIKTI. 2013.
[2] A. Haffif, Suwandi, A. Qurthobi,. Perancangan Dan Implementasi
Sistem Obstacle Avoidance Pada Mobile Robot Beroda Berbasis Kendali Proportional, ,2014,
[3] A. Mulyanto, Rikendry, Sistem Kontrol Pergerakan Robot Beroda Pemadam Api. Seminar Nasional Aplikasi Teknologi Informasi
2007, pp. N-1 - N-4, Juni 16, 2007
[4] S. B. Suharto, Purwanto, G. D. Nusantoro. Sistem Navigasi Wall Following Robot Krpai Divisi Berkaki Menggunakan Kontroler PID, ,2014,
[5] A. Rahman, Monomonic FireFighting Mobile Robot Dengan Sistem Gerak Four Wheel Drive. Jurnal Algoritma Vol. 3, No 1, 2007, pp. 17-26, Maret 2007
Biodata Penulis
Nuryanto,ST,M.Kom, memperoleh gelar Sarjana Teknik
(S.T), jurusan Teknik Industri Universitas Muhammadiyah Magelang, lulus tahun 1996. Memperoleh gelar Magister Komputer (M.Kom) Program Pasca Sarjana Ilmu Komputer Universitas Gajah Mada Yogyakarta tahun 2008. Saat ini menjadi dosen Fakultas Teknik Universitas Muhammadiyah Magelang.
Andi Widiyanto,S.Kom, M.Kom, memperoleh gelar
Sarjana Komputer (S.Kom), Jurusan Teknik Informatika STMIK Bina Patria, lulus tahun 2006. Memperoleh gelar Magister Komputer (M.Kom) Program Pasca Sarjana Magister Teknik Informatika STMIK AMIKOM Yogyakarta taqhun 2013. Saat ini menjadi dosen Fakultas Teknik Universitas Muhammadiyah Magelang.