LANDASAN TEORI
2.1 Artificial Horizon dan Heading Indicator
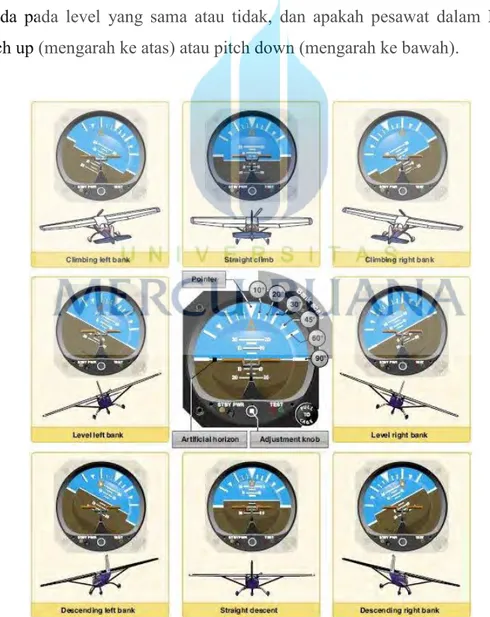
Artificial Horizon digunakan untuk menunjukkan Flight Attitude relative\ terhadap cakrawala. Penamaan ini dimaksudkan untuk membuat pengertian mudah bahwa Artifical Horizon merupakan tiruan dari permukaan cakrawala yang selalu tegak lurus. Prinsip kerja instrument ini menggunakan sistem Gyroscopic. Dengan instrument ini dapat melihat apakah sayap berada pada level yang sama atau tidak, dan apakah pesawat dalam Flight Attitude sedang pitch up (mengarah ke atas) atau pitch down (mengarah ke bawah).
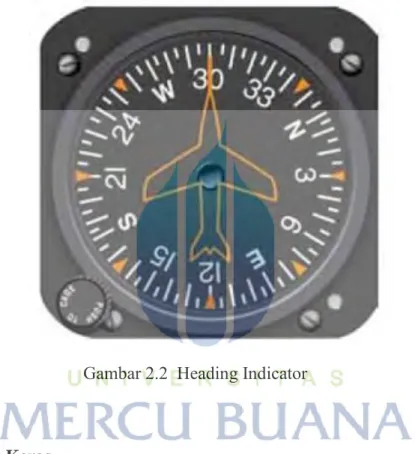
Heading Indicator digunakan untuk memperlihatkan arah dari hidung pesawat yang berhubungan dengan arah magnet kutub bumi. Ketika pesawat berbelok maka jarum pada instrumen akan menunjukkan arah mana dari hidung pesawat bergerak. Instrumen ini dikenal juga dengan Magnetic Directional Indicator. Satuan instrumen ini diukur dalam degrees dengan sudut 0 untuk Utara, 90 untuk Barat, 180 untuk Selatan, dan 270 untuk Timur.
Gambar 2.2 Heading Indicator
2.2 Perangkat Keras
Merancang Artificial Horizon dan Heading Indicator ini tidak lepas dari komponen-komponen perangkat keras yang mendukung sistem kerja keseluruhan, komponen-komponen perangkat keras yang menjadi dasar utama pembuatan alat ini seperti mikrokontroler sebagai penggendali, mpu6050, dfplayer mini, dan komponen pendukung seperti speaker dan baterai.
2.2.1 Mikrokontroler
Mikrokontroler merupakan rangkaian terintegrasi yang berisi komponen-komponen yang diperlukan oleh sebuah komputer seperti CPU, I/O, jalur komunikasi, memori, timer dan lain sebagainya. Mikrokontroler dapat diberi sebuah program yang bekerja sesuai dengan keinginan pengguna dan dapat dihapus dengan cara khusus
Gambar 2.3.Ilustrasi mikrokontroler
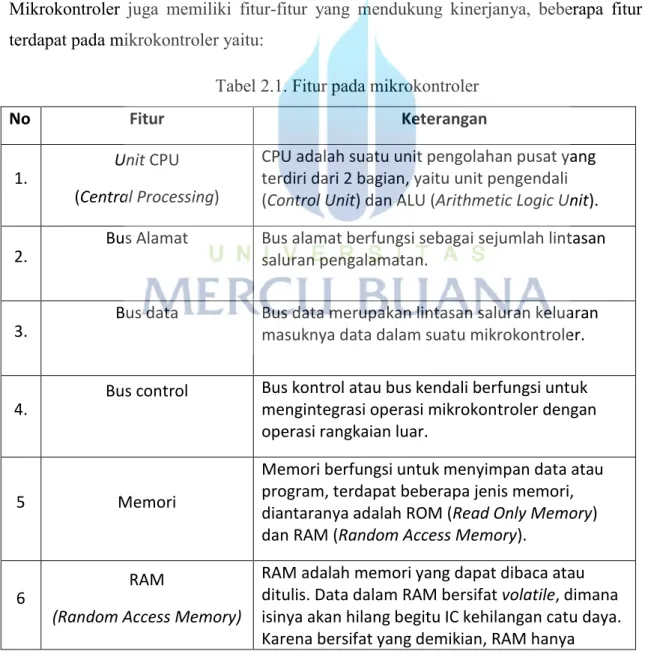
Mikrokontroler juga memiliki fitur-fitur yang mendukung kinerjanya, beberapa fitur yang terdapat pada mikrokontroler yaitu:
Tabel 2.1. Fitur pada mikrokontroler
No Fitur Keterangan
1. Unit CPU
(Central Processing)
CPU adalah suatu unit pengolahan pusat yang terdiri dari 2 bagian, yaitu unit pengendali (Control Unit) dan ALU (Arithmetic Logic Unit).
2.
Bus Alamat Bus alamat berfungsi sebagai sejumlah lintasan saluran pengalamatan.
3. Bus data Bus data merupakan lintasan saluran keluaran masuknya data dalam suatu mikrokontroler.
4. Bus control
Bus kontrol atau bus kendali berfungsi untuk mengintegrasi operasi mikrokontroler dengan operasi rangkaian luar.
5 Memori
Memori berfungsi untuk menyimpan data atau program, terdapat beberapa jenis memori, diantaranya adalah ROM (Read Only Memory) dan RAM (Random Access Memory).
6 RAM
(Random Access Memory)
RAM adalah memori yang dapat dibaca atau ditulis. Data dalam RAM bersifat volatile, dimana isinya akan hilang begitu IC kehilangan catu daya. Karena bersifat yang demikian, RAM hanya
digunakan untuk menyimpan data pada saat program bekerja.
7 ROM (Read Only Memory)
ROM merupakan memori yang hanya dapat dibaca, dimana isinya tidak dapat berubah apabila IC telah kehilangan catu daya
8
Perangkat Masukan/keluaran
Perangkat masukan dan keluaran mikrokontroler adalah suatu peranti yang menghubungkan proses didalam mikrokontroler dengan dunia luar (rangkaian lain), peranti ini dibutuhkan sebagai media komunikasi dengan perangkat lain atau peubah tipe sinyal. Contoh perangkat I/O yaitu:
1. USART (Universal Synchronous Asynchronous Receiver Transmitter) 2. SPI (Serial Peripheral Interface) 3. I2C bus (Inter-Itergrated Circuit Bus) 4. Analog to Digital Conversion (ADC) 5. Digital to Analog(DAC)
6. Analog Comparator 7. USB Converter 8. Clock
Terdapat kit elektronik atau papan rangkaian elektronik open source yang di dalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan Atmel. Beberapa mikrokontroller mega AVR seperti ATmega8, ATmega168, ATmega328, ATmega128, ATmega 2560 dengan menggunakan kristal osilator 8Mhz. Untuk alat pemukul calung yang dibuat menggunakan mikrokontroler ATmega2560 dan mikrokontroler ATmega328.
Gambar 2.4.Mikrokontroler ATmega2560 (a) dan ATmega328 (b)
Mikrokontroler yang digunakan adalah mikrokontroler ATmega2560 (a) yang memiliki total pin sebanyak 54 pin dan mikrokontroler ATmega328 (b) yang memiliki 20 pin dimana 14 pin digital dan 6 pin analog.
2.2.2 Sistem Komunikasi Serial
Port serial adalah port yang paling populer digunakan untuk keperluan koneksi ke piranti luar. Kata “Serial”, menggambarkan prinsip kerja port ini yang memberikan data, cara kerjanya yakni dengan mengambil sebuah byte data lalu kemudian mengirimkan perdelapan bit dalam byte tersebut satu persatu dalam satu jalur data. Terdapat dua cara dalam komunikasi data secara serial, yaitu komunikasi data serial secara sinkron dan komunikasi data serial secara asinkron. Pada komunikasi data serialsinkron, clock dikirimkan bersama-sama dengan data serial, sedangkan pada komunikasi data asinkron clock tidak dikirimkan bersama data serial, tetapi dibangkitkan secara terpisah baik pada bagian pemancar maupun pada bagian penerima. Kecepatan pengiriman data dan faseclock pada bagian pemancar dan bagian penerima harus sinkron, untuk itu diperlukan sinkronisasi antara dua bagian tersebut.dapat dilihat pada gambar 2.5 berikut ini.
Gambar 2.5.Pengiriman data serial
Kecepatan pengiriman data (baud rate) bervariasi, mulai dari 110, 135, 150, 300, 600, 1200, 2400, 4800, 9600, 19200, 38400, 57600, 115200, 230400, 460800 dan 921600 (bit/detik). Pada komunikasi data serialbaut rate dari kedua bagian harus diatur pada kecepatan yang sama. Setelah itu harus ditentukan panjang datanya, apakah 6, 7 atau 8 bit, juga apakah data disertai dengan paritas genap, paritas ganjil atau tidak menggunakan paritas.
2.2.3 Sistem Komunikasi I2C Bus (Inter-Intergrated Circuit Bus)
I2C merupakan singkatan dari Inter-Integrated Circuit, yang disebut dengan I-squared-C atau I-two-C.I2C merupakan protokol yang digunakan pada multi-master serial computer bus yang diciptakan oleh Philips dan digunakan untuk komunikasi low-speed lainnya yang diaplikasikan pada motherboard, embedded sistem, atau cellphone.Jalur I2C bus hanya memiliki dua jalur yang disebut dengan SDA line dan SCL line, dimana SCL line merupakan jalur untuk clock dan SDA line merupakan jalur untuk data. Semua peralatan yang akan digunakan dihubungkan seluruhnya pada jalur SDA line dan SCL line dari I2C bus tersebut.
Jenis komunikasi yang dilakukan antar peralatan dengan menggunakan protokol I2C yang memiliki sifat serial synchronous half duplex bidirectional, dimana data ditransmisikan dan diterima hanya melalui satu jalur data SDA line (bersifat serial), setiap penggunaan jalur data bergantian antar perangkat (bersifat half duplex) dan data dapat di transmisikan dari dan ke sebuah perangkat (bersifat bidirectional). Sumber clock yang digunakan pada I2C bus hanya berasal dari satu perangkat master melalui jalur clock SCL line (bersifat synchronous). Kedua jalur SDA dan SCL merupakan driver yang bersifat “open drain”, yang berarti bahwa IC yang digunakan dapat mengendalikan keluarannya menjadi low, tetapi tidak dapat mengendalikannya menjadi high.
2.2.4 MPU6050
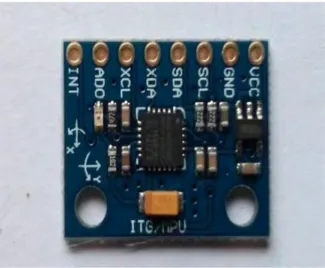
MPU6050 adalah sensor dari InvenSense yang memiliki MEMS accelerometer dan MEMS gyro dalam satu chip. Sensor ini sangat akurat, dan mengandung 16-bits analog to digital konveri hardware untuk setiap kanalnya, sehingga memungkinkan untuk menangkap x, y, dan z kanal dalam satu waktu. Sensor ini menggunakan I2C-bus untuk berkomunikasi dengan Arduino. Sensor ini termasuk sensor yang murah terlebih sensor ini menggabungkan kedua sensor accelerometer dan gyro. Sebenarnya InvenSense juga memiliki sensor 9DOF yang menggabungkan sensor Accelerometer, gyro dan Magnetometer dalam satu chip namun sensor ini terlalu mahal jika dibandingkan menggunakan dua chip MPU-6050 dan HMC5833L.
Membaca data mentah dari accelerometer dan gyro termasuk mudah, yaitu dengan membuat sleep mode tidak aktif kemudian register untuk accelerometer dan gyro dapat dibaca. Tetapi sensor ini juga mengandung 1024 byte FIFO buffer dan buffer ini dapat dibaca Arduino. FIFO buffer ini digunakan bersama dengan sinyal interrupt, jika MPU-6050 mengirim data di FIFO buffer, sensor ini mengirim sinyal Arduino dengan sinyall interrupt sehingga Arduino mengetahui bahwa ada data di FIFO buffer yang menunggu untuk dibaca. Hal yang lebih rumit lagi adalah kemampuan untuk mengendalikan I2C-device kedua. MPU-6050 selalu bekerja sebagai slave unutk Arduino dengan SDA dan SCL pin terhubung dengan bus I2C. Selain bus I2C, sensor ini memiliki pengendali I2C sendiri untuk menjadi master pada (sub)-bus-I2C yaitu dengan menggunakan pin AUX_DA dan AUX_CL sehingga dapat mengedalikan sensor lain seperti magnetometer.
Gambar 2.7 Modul MPU-6050
spesifikasi dari Modul MPU6050 : - Berbasis Chip MPU-6050 - Supply tegangan berkisar 3-5V
- Gyroscope range + 250 500 1000 2000 ° / s - Acceleration range: ± 2 ± 4 ± 8 ± 16 g - Communication standard I2C
- Chip built-in 16 bit AD converter, 16 bits data output - Jarak antar pin header 2.54 mm
- Dimensi modul 20.3mm x 15.6mm
2.2.5 DFPlayer mini mp3
Modul DFPLayer Mini adalah sebuah modul MP3 serial yang menyediakan kesempurnaan integrasi MP3, WMV perangkat kerasdecoding. Sedangkan perangkat lunaknya mendukung driver TF card, mendukung sistem file FAT16, FAT32.
Gambar 2.8.DFPlayer Mini
Melalui perintah-perintah serial sederhana untuk menentukan pemutaran musik, serta bagaimana cara memutar musik dan fungsi lainnya, tidak melalui operasi yang rumit, mudah digunakan, stabil dan dapat diandalkan adalah fitur-fitur yang paling penting dari modul ini.
2.2.6 Speaker
Speaker adalah Transduser yang dapat mengubah sinyal listrik menjadi Frekuensi Audio (sinyal suara) yang dapat didengar oleh telinga manusia dengan cara mengetarkan komponen membran pada Speaker tersebut sehingga terjadilah gelombang suara.
2.2.7 Baterai
Baterai adalah alat listrik-kimiawi yang menyimpan energi dan mengeluarkan dalam bentuk listrik. Sebuah baterai biasanya terdiri dari tiga komponen penting, yaitu :
- Batang karbon sebagai anoda (kutup positif baterai) - Seng (Zn) sebagai katoda (kutub negatif baterai) - Pasta sebagai elektrolit (penghantar)
Gambar 2.10.Baterai
2.3 Perangkat Lunak
Perangkat lunak yang digunakan pada perancangan alat ini menggunakan Perangkat lunak Arduino 1.6.5 IDE dan Processing 2.0.
2.3.1 Arduino IDE
Arduino IDE adalah software yang sangat canggih ditulis dengan menggunakan java. arduino IDE terdiri dari :
- Editor program, sebuah window yang memungkinkan pengguna menulis dan mengedit program dalam bahasa Processing.
- Compiler, sebuah modul yang mengubah kode program (bahasa Processing) menjadi kode biner. Bagaimanapun sebuah microcontroller tidak akan bisa
memahami bahasa Processing. Yang bisa dipahami oleh microcontroller adalah kode biner. Itulah sebabnya compiler diperlukan dalam hal ini.
- Uploader, sebuah modul yang memuat kode biner dari Jomputer ke dalam memory di dalam papan Arduino.
-
Gambar 2.11 Arduino IDE
2.3.2 Processing IDE
Processing adalah bahasa pemrograman dan lingkungan pemrograman (development environment) open source untuk memprogram gambar, animasi dan interaksi. Digunakan oleh pelajar, seniman, desainer, peneliti, dan hobbyist untuk belajar, membuat prototipe, dan produksi. Processing digunakan untuk mengajarkan dasar-dasar pemrograman komputer dalam konteks rupa dan berfungsi sebagai buku sketsa perangkat lunak (software)
dan tool produksi profesional. Processing adalah suatu projek terbuka yang diinisiasi oleh Ben Fry dan Casey Reas. Berkembang dari ide-ide yang dieksplorasi di Aesthetics and Computation Group (ACG) di MIT Media Lab. Projek ini kini terus diperbaiki dan dikelola oleh sejumlah kecil tim voluntir. Processing mengaitkan konsep software pada prinsip-prinsip bentuk rupa, gerak, dan interaksi. Processing mengintegrasikan suatu bahasa pemrograman, lingkungan pemrograman, dan metodologi pengajaran ke dalam sistem terpadu.