Perbandingan antara Ensemble Kalman Filter
dan Fuzzy Kalman Filter:
Supervisor:
Prof. Dr. Dra. Erna Apriliani, M.Si
Hendro Nurhadi, Dipl-Ing., Ph.D
Perbandingan antara Ensemble Kalman Filter dan Fuzzy Kalman Filter:
BAGAIMANA
PENELITIAN
INI
?
FUZZY KALMAN FILTER
(ZUNIF ERMAYANTI, 2015)
Perbandingan
Estimasi Posisi
AUV antara
Metode EnKF
RUMUSAN
MASALAH
Bagaimana Estimasi Posisi AUV dengan EnKF
?
TUJUAN
Estimasi posisi AUV sesuai
dengan lintasan.
MANFAAT
Sebagai pengembangan dan penunjang
penelitian pada bidang AUV
Sebagai pustaka atau acuan untuk
penelitian AUV selanjutnya
Sebagai alat yang dapat diaplikasikan di Indonesia
untuk beberapa bidang seperti industri kelautan,
Militer, keilmuan, militer, lingkungan,
AUV
AUV adalah perangkat robotik
yang dikendalikan di dalam air
dengan menggunakan sistem
penggerak, dikontrol dan
dikemudikan (dikendalikan)
oleh perangkat komputer dan
bermanuver pada tiga dimensi
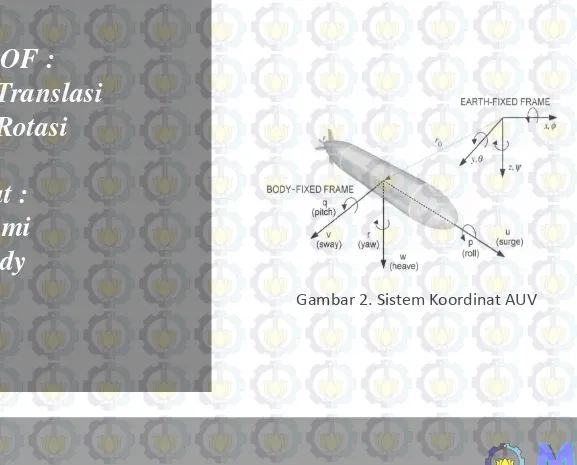
AUV 6 DOF :
3 Gerak Translasi
3 Gerak Rotasi
Koordinat :
Pusat Bumi
Pusat Body
NOTASI AUV
SURGE
SWAY
HEAVE
Gaya/Momen
KECEPATAN
POSISI
NOTASI AUV
ROLL
PITCH
YAW
Gaya/Momen
KECEPATAN
POSISI
𝑚 𝑢 − 𝑣𝑟 + 𝑤𝑞 − 𝑥
𝐺
𝑞
2
+ 𝑟
2
+ 𝑦
𝐺
𝑝𝑞 − 𝑟
MODEL AUV
𝑚 𝑣 − 𝑤𝑝 + 𝑢𝑟 − 𝑦
𝐺
𝑟
2
+ 𝑝
2
+ 𝑧
𝐺
𝑞𝑟 − 𝑝
MODEL AUV
𝑚 𝑤 − 𝑢𝑞 + 𝑣𝑝 − 𝑧
𝐺
𝑝
2
+ 𝑞
2
+ 𝑥
𝐺
𝑟𝑝 − 𝑞
MODEL AUV
𝐼
𝑥
𝑝 + 𝐼
𝑧
− 𝐼
𝑦
𝑞𝑟
+ 𝑚 𝑦
𝐺
𝑤 − 𝑢𝑞 + 𝑣𝑝 − 𝑧
𝐺
𝑣 − 𝑤𝑝 + 𝑢𝑟
= 𝐾
𝑟𝑒𝑠
+ 𝐾
𝑝 𝑝
𝑝 𝑝 + 𝐾
𝑝
𝑝 + 𝐾
𝑝𝑟𝑜𝑝
MODEL AUV
𝐼
𝑦
𝑞 + 𝐼
𝑥
− 𝐼
𝑧
𝑟𝑝
+ 𝑚 𝑧
𝐺
𝑢 − 𝑣𝑟 + 𝑤𝑞 − 𝑥
𝐺
𝑤 − 𝑢𝑞 + 𝑣𝑝
= 𝑀
𝑟𝑒𝑠
+ 𝑀
𝑤 𝑤
𝑤 𝑤 + 𝑀
𝑞 𝑞
𝑞 𝑞 + 𝑀
𝑤
𝑤
+ 𝑀
𝑞
𝑞 + 𝑀
𝑢𝑞
𝑢𝑞 + 𝑀
𝑣𝑝
𝑣𝑝 + 𝑀
𝑟𝑝
𝑟𝑝 + 𝑀
𝑢𝑤
𝑢𝑤
+ 𝑀
𝑢𝑢𝛿
𝑠
𝑢
2
𝛿
𝑠
MODEL AUV
𝐼
𝑧
𝑟 + 𝐼
𝑦
− 𝐼
𝑥
𝑝𝑞
+ 𝑚 𝑥
𝐺
𝑣 − 𝑤𝑝 + 𝑢𝑟 − 𝑦
𝐺
𝑢 − 𝑣𝑟 + 𝑤𝑞
= 𝑁
𝑟𝑒𝑠
+ 𝑁
𝑣 𝑣
𝑣 𝑣 + 𝑁
𝑟 𝑟
𝑟 𝑟 + 𝑁
𝑣
𝑣 + 𝑁
𝑟
𝑟
+ 𝑁
𝑢𝑟
𝑢𝑟 + 𝑁
𝑤𝑝
𝑤𝑝 + 𝑁
𝑝𝑞
𝑝𝑞 + 𝑁
𝑢𝑣
𝑢𝑣
+ 𝑀
𝑢𝑢𝛿
𝑟
𝑢
2
𝛿
𝑟
MODEL AUV
PENELITIAN SEBELUMNYA
ZUNIF ERMAYANTI
“Estimasi dan Kendali
Posisi Autonomous
Underwater Vehicle
Berdasarkan Lintasan
yang Ditentukan”.
Estimasi dan Kendali Posisi Autonomous Underwater Vehicle
Berdasarkan Lintasan yang Ditentukan (Ermayanti, 2015)
Fuzzifikasi
Simbol
Keterangan
Inisialisasi
𝑢
−Menunjukan kecepatan surge minimum
0
𝑢
+Menunjukan kecepatan surge maksimum
1
𝑣
−Menunjukan kecepatan sway minimum
0
𝑣
+Menunjukan kecepatan sway maksimum
1
𝑤
−Menunjukan kecepatan heave minimum
0
𝑤
+Menunjukan kecepatan heave maksimum
1
𝑝
−Menunjukan kecepatan roll minimum
0
𝑝
+Menunjukan kecepatan roll maksimum
1
𝑞
−Menunjukan kecepatan pitch minimum
0
𝑞
+Menunjukan kecepatan pitch maksimum
1
𝑟
−Menunjukan kecepatan yaw minimum
0
Fuzzifikasi
Fungsi
Kenggotaan
𝜇
𝑢1=
𝑢
𝑢 − 𝑢
+− 𝑢
−−𝜇
𝑢1=
𝑢
𝑢
++− 𝑢
− 𝑢
−Jika kecepatan
minimum
Aturan Dasar
Logika Fuzzy
𝐼𝐹 𝑎 𝑖𝑠 𝐴
𝑖𝑇ℎ𝑒𝑛 𝑥
𝑘+1𝑖= 𝜇
𝐴𝑖𝑎 𝑎𝑥
𝑘Aturan Dasar
Logika Fuzzy
n=6,
2
6
= 64 Aturan
Aturan
u
v
w
p
q
r
Output
1
1
1
1
1
1
1
𝐴
12
1
1
1
1
1
0
𝐴
23
1
1
1
1
0
1
𝐴
34
1
1
1
1
0
0
𝐴
45
1
1
1
0
1
1
𝐴
56
1
1
1
0
1
0
𝐴
67
1
1
1
0
0
1
𝐴
7Algoritma
Fuzzy Kalman Filter
Model Sistem
dan Pengukuran
𝑥
𝑘+1
= 𝐴
𝑖
𝑘
𝑥
𝑘
+ B
k
u
k
+ ξ
k
𝑧
𝑘
= 𝐻
𝑘
𝑥
𝑘
+ 𝜍
𝑘
ξ
k
∽ 𝑁 0, 𝑄
𝑘
, 𝜍
𝑘
∽ 𝑁 0, 𝑅
𝑘
Inisialisasi Awal
𝑃(0) = 𝑃
𝑥 0 = 𝑥
0
Algoritma
Fuzzy Kalman Filter
Tahap Prediksi
𝑥
𝑘+1
−
= 𝐴
𝑖
𝑘
𝑥
𝑘
+ B
k
u
k
Algoritma Fuzzy Kalman Filter
Tahap
Koreksi
Kalman Gain
𝐾
𝑘+1
= 𝑃
𝑘+1
−
𝐻
𝑘+1
𝑇
𝐻
𝑘+1
𝑃
𝑘+1
−
𝐻
𝑘+1
𝑇
+ 𝑅
𝑘+1
−1
Update Estimasi:
𝑥
k+1
= 𝑥
𝑘+1
−
+ 𝐾
𝑘+1
(𝑧
𝑘+1
− 𝐻 𝑥
𝑘+1
−
)
Update Kovarian Error:
Defuzzifikasi
𝑥
𝑘+1
−
=
𝜌
1
𝑥
𝑘+1
1
+𝜌
2
𝑥
𝑘+1
2
+⋯+𝜌
64
𝑥
𝑘+1
64
Metode Fuzzy Kalman Filter (FKF) dan Kalman Filter
(KF) dapat digunakan untuk estimasi posisi gerak AUV.
RMSE hasil estimasi dengan menggunakan Fuzzy
Kalman Filter memiliki error yang lebih kecil
dibandingkan dengan Kalman Filter. Namun waktu
komputasi yang dibutuhkan metode FKF lebih lama
dibandingkan dengan KF.
Estimasi dan Kendali Posisi Autonomous Underwater Vehicle
𝐴 𝑥 = 𝐵
ENSEMBLE KALMAN FILTER
PADA ESTIMASI POSISI AUV
𝐵
1=
𝑚 − 𝑋
1
𝑢
𝑋
𝑟𝑒𝑠+ 𝑋
𝑢 𝑢𝑢 𝑢 + 𝑋
𝑤𝑞𝑤𝑞 + 𝑋
𝑞𝑞𝑞𝑞
+𝑋
𝑣𝑟𝑣𝑟 + 𝑋
𝑟𝑟𝑟𝑟 + 𝑋
𝑝𝑟𝑜𝑝−𝑚 −𝑣𝑟 + 𝑤𝑞 − 𝑥
𝐺𝑞
2+ 𝑟
2+ 𝑦
𝐺𝑝𝑞 + 𝑧
𝐺𝑝𝑟
𝐵
2=
𝑚 − 𝑌
1
𝑣𝑌
𝑟𝑒𝑠+ 𝑌
𝑣 𝑣𝑣 𝑣 + 𝑌
𝑟 𝑟𝑟 𝑟 + 𝑌
𝑢𝑟𝑢𝑟
+𝑌
𝑤𝑝𝑤𝑝 + 𝑌
𝑝𝑞𝑝𝑞 + 𝑌
𝑢𝑣𝑢𝑣 + 𝑌
𝑢𝑢𝛿𝑟𝑢
2𝛿
𝑟𝐵
3=
𝑚 − 𝑍
1
𝑤
𝑍
𝑟𝑒𝑠+ 𝑍
𝑤 𝑤𝑤 𝑤 + 𝑍
𝑞 𝑞𝑞 𝑞 + 𝑍
𝑢𝑞𝑢𝑞
+𝑍
𝑣𝑝𝑣𝑝 + 𝑍
𝑟𝑝𝑟𝑝 + 𝑍
𝑢𝑤𝑢𝑤 + 𝑍
𝑢𝑢𝛿𝑠𝑢
2𝛿
𝑠−𝑚 𝑤 − 𝑢𝑞 + 𝑣𝑝 − 𝑧
𝐺𝑝
2+ 𝑞
2+ 𝑥
𝐺𝑟𝑝 + 𝑦
𝐺𝑟𝑞
𝐵
4
=
𝐼
1
𝑥
− 𝐾
𝑝
𝐵
5=
𝐼
1
𝑦