APLIKASI
REMOTE CONTROL
TELEVISI SEBAGAI
PENGENDALI BEBAN
TUGAS AKHIR
Diajukan Untuk memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh :
MARGARETHA SILVIANA
NIM: 065114028
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
2011
FINAL PROJECT
APPLICATION OF TELEVISION REMOTE CONTROL AS A
LOAD CONTROL
Presented as Partial Fulfillment of the Requirements
To Obtain the Sarjana Teknik Degree
In Electrcal Engineering Study Program
MARGARETHA SILVIANA
NIM : 065114028
ELECTRICAL ENGINEERING STUDY PROGRAM SCIENCE
AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2011
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP
MOTTO :
“Orang lain boleh menganggap kita tidak
mampu, tetapi kita harus buktikan kalau kita
mampu dan bisa berhasil “
Skripsi ini kupersembahkan untuk ...
TUHAN Yang Maha Esa Pembimbingku yang setia
Papa dan Mama tercinta serta kedua saudaraku
Juga untuk orang yang selalu setia
membantu dan menyemangatiku
INTISARI
Aplikasi remote control televisi sebagai pengendali beban adalah alat yang digunakan untuk mengendalikan beban dari jarak jauh tanpa user harus ke saklar untuk meng-on/off kan beban tersebut.
Beban yang digunakan berupa tiga buah lampu. Beban (lampu) dapat diatur waktu menyalanya untuk on/off sesuai dengan keinginan user dengan kenaikan dan penurunan waktu tiap 5 menit. Tampilan beban dan timer dapat dilihat pada LCD (Liquid Crystal
Display). LCD yang digunakan tipe LMB162ABC dan remote control televisi yang
digunakan dengan merek SONY.
Dari hasil percobaan, alat ini telah bekerja sesuai dengan perancangan. Hal ini dapat dibuktikan dari hasil pengujian antara remote control televisi dengan rangkaian aplikasi yang telah dirancang. Ketiga lampu dapat dikendalikan baik secara sendiri-sendiri maupun secara bersamaan. Jarak maksimun yang dapat diterima antara remote control televisi dengan penerima pengendali beban adalah sejauh 7 meter dengan sudut maksimum sebesar 45°.
ABSTRACT
Applications television remote control as the load controller is a device that is used to control the load from far distance without switching on and off the lamp switch by the user.
The amounts used in the from of three load lamps. The time of load (lamp) can be set to switch in for on/off according to user’s control to increase and decrease the time every 5 minutes. The load display and the timer can be viewed on the LCD (Liquid Crystal Display). LCD that used is LMB162ABC and television remote control that used is the SONY brand.
From the experiment results, this device has been working according to the design. This can be shown from the test results between the television remote control with a series of application that have been designed. The three lamps can be controlled separately or simultaneously. The maximum acceptable distance between the remote control of the television with the load control receiver is as far as 7 meters with a maximum angle of 45 degrees.
KATA PENGANTAR
Syukur dan terima kasih kepada Tuhan Yang Maha Esa atas segala rahmat dan
karunia-Nya sehingga tugas akhir dengan judul “Aplikasi Remote Control Televisi” ini dapat
diselesaikan dengan baik.
Selama menulis tugas akhir ini, penulis menyaadari bahwa ada begitu banyak pihak
yang telah memberikan bantuan dengan cara masing-masing, sehingga tugas akhir ini bisa
diselesaikan. Oleh karena itu penulis ingin mengucapkan terima kasih kepada:
1. Kepada orang tua yang tercinta atas doa, kesabaran dan dukungan baik secara moral
ataupun materi.
2. Kedua saudaraku Stephanie Verawati dan Deliyanti Chintya Venny atas dukungan
dan pengertiannya.
3. Bapak Damar Widjaja, ST., MT., selaku dosen pembimbing yang dengan penuh
kesabaran membimbing, member saran dan kritik yang membantu penulis dalam
menyelesaikan tugas ini.
4. Seluruh dosen teknik elektro, laboran dan sekretariat yang telah banyak memberikan
pengetahuan kepada penulis selama ini.
5. Rudy Aziz , selaku pembimbing yang telah membantu penulis dalam mengerjakan
tugas akhir ini.
xi
DAFTAR ISI
HALAMAN JUDUL ………. i
HALAMAN PERSETUJUAN ………. iii
HALAMAN PENGESAHAN ……… iv
HALAMAN PERNYATAAN KEASLIAN KARYA ……… v
HALAMAN PERSEMBAHAN DAN MOTTO ………. vi
LEMBAR PENYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS ……… vii
INTISARI ……….. viii
ABSTRACT ……….. ix
KATA PENGHANTAR ………... x
DAFTAR ISI ………. xii
DAFTAR GAMBAR ……… xv
DAFTAR TABEL ……….... xviii
BAB I PENDAHULUAN ………. 1
1.1 Latar Belakang Masalah ……….. 1
1.2 Tujuan dan Manfaat Penelitian ……… 2
1.3 Batasan Masalah ……….. 2
1.4 Metodologi Penelitian ………. 3
BAB II DASAR TEORI ………... 5
2.1 Infra Red ……….. 5
2.2 Metode Pengiriman Data Remote Control ……….. 6
2.2.1 Header …….……….. 7
2.3 Protokol SONY ………... 9
2.4 Detektor Infra Red ………. 10
2.5 Mikrokontroler AT89S51 ……… 13
2.5.1 Arsitektur AT89S51 ………. 14
2.5.2 Fungsi Pin Mikrokontroler AT89S51 ……….. 14
2.5.3 Organisasi Memori ………... 17
2.5.4 Timer dan Counter ………... 18
2.5.5 Sistem Interupsi ……… 21
2.6 LCD (Liquid Crystal Display) ………. 21
2.7 TRIAC (TRIode Alternating Current) ………. 23
2.7.1 Karakteristik TRIAC ……….... 24
BAB III PERANCANGAN DAN PEMBUATAN ALAT ……… 27
3.1 Diagram Blok ……… 27
3.2 Perancangan Hardware ……….. 28
3.2.1 Penerima Infra Red ……….. 28
3.2.2 Rangkaian Osilator ……….. 29
3.2.3 Rangkaian LCD ………... 29
3.2.4 Rangkaian Driver TRIAC ……… 31
3.2.5 Rangkaian Mikrokontroler AT89S51 ………... 33
3.3 Pemograman Mikrokontroler ……….. 35
3.3.1 Pengolahan Data Beban ………... 36
3.3.2 Pengolahan Data Waktu ………... 39
3.3.3 Tampilan pada LCD ………. 43
BAB IV HASIL DAN PEMBAHASAN ……….. 46
4.1 Hasil Akhir Perancangan ………. 46
4.2 Cara Kerja Pengendali Beban Menggunakan Remote Control Televisi ... 47
4.3 Pengujian Unit Pengendali Beban dengan Menggunakan Remote Control Televisi ... 49
4.4 Pengujian Sinyal Pada Receiver ... 52
4.5 Pengujian Driver TRIAC ... 56
BAB V KESIMPULAN DAN SARAN ... 57
5.1 Kesimpulan ... 57
5.2 Saran ... 57
DAFTAR PUSTAKA ... 58
LAMPIRAN ... 59
DAFTAR GAMBAR
Halaman
Gambar 1.1 Model sistem perancangan ………... 3
Gambar 2.1 Lebar pulsa dan lebar jeda pada Pulse-Coded Signal [4] ... 6
Gambar 2.2 Lebar pulsa dan lebar jeda pada Space-Coded Signal [4] ... 7
Gambar 2.3 Lebar pulsa dan lebar jeda pada Shift-Coded Signal [4] ... 7
Gambar 2.4 Lebar header dan kode remote control [4] ………... 8
Gambar 2.5 Bentuk sinyal pulse modulation [5] ... 9
Gambar 2.6 Kemasan detektor infra red GP1U5 dari Sharp [6] ... 11
Gambar 2.7 Diagram blok kemasan detektor GP1U5 [6] ... 12
Gambar 2.8 Keluaran kemasan detektor GP1U5 [6] ... 12
Gambar 2.9 Konfigurasi pin AT89S51 [7] ………...……….... 14
Gambar 2.10 Osilator eksternalAT89S51 [7] ………...………….... 17
Gambar 2.11 Bit-bit pada timer control [7] ... 18
Gambar 2.12 Mode operasi timer/counter pada TMOD [7] ... 18
Gambar 2.13 (a)Bentuk LCD 16 x 2. (b)Pin LCD 16 ×2 [8] ………... 22
Gambar 2.14 Simbol dan ekuivalensi TRIAC [9] ... 24
Gambar 2.15 Karakteristik TRIAC [9] ... 24
Gambar 2.16 Rangkaian sederhana snubber pada TRIAC [10] ... 25
Gambar 3.1 Blok diagram sistem ... 27
Gambar 3.2 Rangkaian penerima infra red [11] ... 28
Gambar 3.3 Rangkaian Osilator [12] ... 29
Gambar 3.4 Rangkaian LCD ... 30
Gambar 3.5 Rangkaian driver TRIAC ... 34
Gambar 3.6 Rangkaian penguat akhir untuk mengontrol beban ... 33
Gambar 3.7 Konfigurasi Mikrokontroler, Penerima infra red, TRIAC, dan LCD ... 34
Gambar 3.8 Flowchart Program Utama ... 35
Gambar 3.9 Flowchart Tombol Program (+) dan Tombol Program (-) untuk pengaturan beban ... 37
Gambar 3.10 Flowchart Pengaktifan beban ... 38
Gambar 3.11 Flowchart Non aktifan beban ... 39
Gambar 3.10 Flowchart volume (+) dan volume (-) sebagai pengaturan waktu pada beban ... 40
Gambar 3.11 Flowchart pengaktifan waktu pada beban ... 41
Gambar 3.12 Flowchart pengaturan waktu untuk pengaktifan waktu pada beban ... 42
Gambar 3.13 Flowchart non-aktifan waktu pada beban ... 42
Gambar 3.14 Flowchart pengaturan waktu untuk non-aktifan waktu pada beban ... 43
Gambar 3.16 Flowchart inisialisasi LCD ... 44
Gambar 3.15 Flowchart tampilan pada LCD ... 45
Gambar 4.1 Bentuk fisik pengendali beban melalui remote control televisi ... 46
Gambar 4.2 Bentuk fisik rangkaian pengendali beban ... 47
Gambar 4.3 Bentuk pola radiasi dari pemancar infra redremote control televisi terhadap penerima infra red ... 48
Gambar 4.4 Tampilan pada LCD saat beban pertama (lampu berwarna orange) Dinyalakan ... 49
Gambar 4.5 Tampilan pada LCD saat beban pertama, kedua dan ketiga dinyalakan ... 50
Gambar 4.6 Bentuk sinyal dari tombol program (+) ... 53
Gambar 4.7 Bentuk sinyal dari tombol program (-) ... 53
Gambar 4.8 Bentuk sinyal dari tombol volume (+) ... 54
Gambar 4.9 Bentuk sinyal dari tombol volume (-) ... 54
Gambar 4.10 Bentuk sinyal header ... 55
Gambar 4.11 Bentuk sinyal bit 1 ... 55
Gambar 4.12 Bentuk sinyal bit 0 ... 56
Gambar 4.13 (a) Pengukuran tegangan pada TRIAC. (b) Tampilan hasil pengukuran... ... 56
DAFTAR TABEL
Halaman
Tabel 2.1 Metode pengiriman kode remote control televisi dari berbagai
Merek [4] ... 8
Tabel 2.1 (Lanjutan) Metode pengiriman kode remote control televisi dari Berbagai merek [4] ... 8
Tabel 2.2 Contoh kode remote control televisi merek SONY [5] ... 10
Tabel 2.3 Keluarga mikrokontroler MCS-51 [7] ... 13
Tabel 2.4 Fungsi alternatif port 3 [7] ... 16
Tabel 2.5 Keterangan register TCON [7] ... 19
Tabel 2.6 Kombinasi M0 dan M1 pada register TMOD [7] ... 20
Tabel 2.7 Pin tampilan LCD [8] ... 23
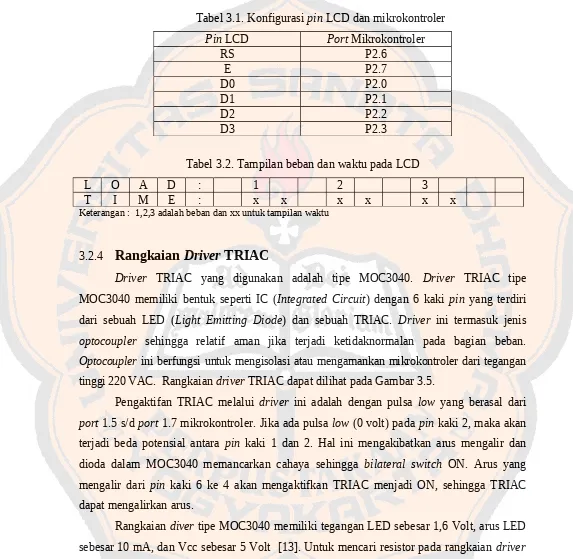
Tabel 3.1 Konfigurasi pin LCD dan mikrokontroler ... 31
Tabel 3.2 Tampilan beban dan waktu pada LCD ... 31
Tabel 4.1 Cara kerja antara remote control televisi dengan hardware pengendali beban ... 51
Tabel 4.1 (Lanjutan) Cara kerja antara remote control televisi dengan hardware Pengendali beban ... 52
BAB I
PENDAHULUAN
1.1 Latar Belakang Masalah
Energi listrik adalah salah suatu energi yang pada saat ini sangat dibutuhkan manusia
dalam kehidupan sehari-hari, misalnya peralatan listrik pada sebuah rumah. Sebuah rumah
biasanya memiliki ukuran ruangan yang cukup luas, sehingga untuk peletakan saklar lampu
dan stop kontak antara yang satu dengan lainnya memiliki jarak yang cukup jauh dan tidak
efektif dalam pengoperasiannya. Selain itu, setiap rumah memiliki perlengkapan elektronik
yang cukup banyak sehingga untuk menghidupkannya satu persatu memerlukan waktu
cukup lama. Agar kegiatan pada sebuah rumah menjadi lebih mudah dan praktis, sebuah
peralatan pengendali jarak jauh diperlukan untuk mengendalikan peralatan yang ada di
dalam rumah.
Terdapat berbagai macam cara untuk mengendalikan peralatan rumah tangga, antara
lain pengendali peralatan rumah tangga melalui jalur telephone dan RS485 [1]. Selain itu,
ada juga proses pengendalian peralatan rumah tangga tanpa kabel dengan menggunakan
cahaya infra red. Pengendalian ini biasanya berupa remote control televisi infra red yang
dapat digunakan untuk pengendalian jarak jauh. Penggunaan infra red untuk indoor (dalam
ruangan) lebih praktis karena stabilitas remote control televisi yang membuat pengguna
dapat dengan mudah mengendalikan peralatan dari sudut-sudut ruangan yang diinginkan.
Pengendalian peralatan rumah tangga menggunakan remote control televisi infra red
mempunyai keterbatasan jika akan digunakan untuk outdoor (luar ruangan), misalkan
mengendalikan peralatan rumah tangga yang berada di luar ruangan atau rumah. Hal ini
dapat diatasi dengan menggunakan kabel yang panjang untuk transmisi data, tetapi hal
tersebut kurang praktis dan aman.
Pengendalian remote control televisi biasanya hanya digunakan pada televisi saja.
Untuk lebih mengoptimalkan fungsi dari remote control televisi, penelitian ini akan
menghasilkan sistem pengendali yang menggunakan remote control televisi sebagai
pengendali peralatan rumah tangga.
1.2 Tujuan dan Manfaat
Tujuan yang ingin dicapai dalam penelitian ini adalah membuat apliksai remote
control televisi sebagai pengendali beban.
Manfaat dari penelitian ini adalah :
a. Dapat membantu masyarakat umum untuk mempermudah kegiatan
sehari-hari dalam mengendalikan perangkat elektronik.
b. Bagi pembaca, hasil penelitian ini diharapkan dapat memberikan atau
menambah pengetahuan tentang apliksai remote control televisi sebagai
pengendali beban.
c. Hasil penelitian ini diharapkan menjadi salah satu bahan refrensi ataupun
sumber informasi dalam mengembangkan penelitian sejenis selanjutnya.
1.3 Batasan Masalah
Dalam tugas akhir ini permasalahan dibatasi sebagai berikut :
1. Alat yang dibuat berbasis mikrokontroler AT89S51.
2. Remote control yang digunakan adalah remote control televisiSONY yang dijual di
pasaran.
3. Menggunakan LCD module 16 x 2 karakter untuk menampilkan waktu pengendalian
dan kondisi beban.
4. Beban yang digunakan adalah 3 buah lampu.
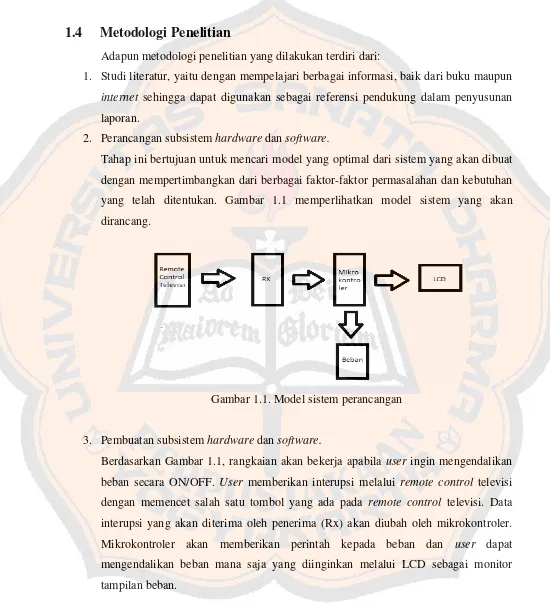
1.4 Metodologi Penelitian
Adapun metodologi penelitian yang dilakukan terdiri dari:
1. Studi literatur, yaitu dengan mempelajari berbagai informasi, baik dari buku maupun
internet sehingga dapat digunakan sebagai referensi pendukung dalam penyusunan
laporan.
2. Perancangan subsistem hardware dan software.
Tahap ini bertujuan untuk mencari model yang optimal dari sistem yang akan dibuat
dengan mempertimbangkan dari berbagai faktor-faktor permasalahan dan kebutuhan
yang telah ditentukan. Gambar 1.1 memperlihatkan model sistem yang akan
dirancang.
Gambar 1.1. Model sistem perancangan
3. Pembuatan subsistem hardware dan software.
Berdasarkan Gambar 1.1, rangkaian akan bekerja apabila user ingin mengendalikan
beban secara ON/OFF. User memberikan interupsi melalui remote control televisi
dengan memencet salah satu tombol yang ada pada remote control televisi. Data
interupsi yang akan diterima oleh penerima (Rx) akan diubah oleh mikrokontroler.
Mikrokontroler akan memberikan perintah kepada beban dan user dapat
mengendalikan beban mana saja yang diinginkan melalui LCD sebagai monitor
4. Proses pengambilan data.
Teknik pengambilan data dilakukan dengan cara pengiriman data interupsi ke
mikrokontroler oleh remote control televisi. Setelah itu, mikrokontroler akan
mengolahnya dan mengirimkan data ke protokol beban yang diinginkan untuk
ON/OFF. Beban yang dikendalikan itu dapat dilihat pada LCD.
5. Analisa dan penyimpulan hasil percobaan.
Analisa data dilakukan dengan mengecek keakuratan data terhadap hasil dari
pengujian alat yang telah dilakukan. Penyimpulan hasil percobaan dapat dilakukan
BAB II
DASAR TEORI
Bab ini akan menjelaskan perencanaan dan realisasi alat yang meliputi pemancar infra
red, detektor infra red, TRIAC, LCD, dan mikrokontroler.
2.1
Infra red
Sinar infra red adalah termasuk cahaya monokromatis yang tidak tampak oleh mata
manusia. Spektrum frekuensi cahaya secara umum dibagi menjadi tiga bagian yaitu [2]:
a. Infra red, mempunyai panjang gelombang 0,3 mm–0,7 m.
b. Cahaya tampak, mempunyai panjang gelombang 0,7 m – 0,4 m.
c. Ultra Violet, mempunyai panjang gelombang 0,4 m – 0,03 m.
Gelombang elektromagnetik merupakan penyusun dari cahaya yang berada dalam
spektrum elektromagnetik yang mempunyai jangkauan sangat lebar [3]. Pada jarak yang
sama, seluruh spektrum elektromagnetik tersebut mempunyai cepat rambat yang sama tetapi
frekuensinya berbeda sesuai dengan panjang gelombangnya. Dalam hal ini berlaku :
e = .f ( 2.1)
dengan e adalah kecepatan cahaya (m/s), adalah panjang gelombang (m), dan f adalah
frekuensi (Hz).
Suatu spektrum frekuensi cahaya disebut infra red jika panjang gelombangnya
0,78m – 1000m [2]. Sedangkan spektrum frekuensi yang sering digunakan adalah 2,5.1014
Hz – 2,0.1014 Hz.
2.2
Metode Pengiriman Data
Remote Control
Infra red remote control menggunakan cahaya infra red sebagai media dalam
mengirimkan data ke penerima [4]. Data yang dikirimkan berupa pulsa-pulsa cahaya dengan
modulasi frekuensi carrier 30kHz sampai 40kHz. Sinyal yang dikirimkan merupakan
data-data biner. Ada tiga metode yang digunakan untuk membentuk data-data-data-data biner tersebut yaitu
pengubahan lebar pulsa, lebar jeda (space), dan gabungan keduanya.
Pulse - Coded SignalsPengiriman kode pada pulse – coded signal dilakukan dengan lebar jeda tetap yaitu t
sedangkan lebar pulsa adalah 2t. Jika lebar pulsa dan lebar jeda adalah sama yaitu t,
maka yang dikirim adalah bit 0. Jika lebar pulsa adalah 2t dan lebar jeda adalah t, maka
yang dikirim adalah 1. Lebar pulsa dan lebar jeda pada pulse-coded sinyal ditunjukkan
pada Gambar 2.1.
Gambar 2.1. Lebar pulsa dan lebar jeda pada Pulse-Coded Signal [4]
Space - Coded SignalPengiriman kode remote control dilakukan dengan cara mengubah lebar jeda, sedangkan
lebar pulsa tetap. Jika lebar jeda dan lebar pulsa adalah sama yaitu t, maka yang dikirim
adalah 0 . Jika lebar jeda adalah 3t, maka data yang dikirim adalah 1. Lebar pulsa dan
Gambar 2.2. Lebar pulsa dan lebar jeda pada Space-Coded Signal [4]
Shift - Coded SignalTipe ini merupakan gabungan dari tipe pulse dan space. Pengiriman kode remote
control dilakukan dengan cara mengubah lebar pulsa dan lebar jeda. Jika lebar jeda
adalah t dan lebar pulsa adalah 2t, maka ini diartikan sebagai data 1. Jika lebar jeda
adalah 2t dan lebar pulsa adalah t, maka ini diartikan sebagai data 0 (low). Lebar pulsa
dan lebar jeda pada shift-code sinyal ditunjukkan pada Gambar 2.3.
Gambar 2.3. Lebar pulsa dan lebar jeda pada Shift-Coded Signal [4]
2.2.1 HEADER
Sebelum kode dikirim, sinyal awal yang disebut header dikirim terlebih dahulu.
Header adalah sinyal yang dikirimkan sebelum kode sebenarnya dan juga merupakan sinyal
untuk mengaktifkan penerima. Header selalu dikirimkan dengan lebar pulsa yang jauh lebih
panjang dari pada kode. Kode remote control dikirimkan setelah header dikirimkan terlebih
sebagai penunjuk alamat peralatan yang akan diaktifkan dan fungsi kedua adalah sebagai
command atau perintah untuk melaksanakan instruksi dari remote control. Lebar header dan
kode remote control ditunjukkan pada Gambar 2.4.
Gambar 2.4. Lebar header dan kode remote control [4]
Antara jenis remote control yang satu dengan lainnya memiliki panjang header
berbeda, begitu pula lebar pulsa dan jeda (space). Tabel 2.1 menjelaskan tentang jenis
remote control dari berbagai merek perusahaan.
Tabel 2.1. Metode pengiriman kode remote control dari berbagai merek [4]
Merek
Remote
Panjang
data Tipe
Header
Pulse
Header
Space 1 Pulse 1 Space 0 Pulse 0 Space
Akai 32 bit Space 8800 2200 550 1650 550 550
Canon 32 bit Space 8800 4400 550 1650 550 550
Denon 15 bit Space 0 0 275 1900 275 275
Finlux 10/16 bit Shift 500 5200 500 530 500 530
Funai 24 bit Space 3200 3200 800 2400 800 800
Goldstar 32 bit Space 8800 2200 550 1650 550 550
Grundig 10 bit Shift 500 2600 500 550 500 550
Hitachi 32 bit Space 8800 2200 550 1650 550 550
JVC 16 bit Space 2080 4160 520 1560 520 520
Kenwood 32 bit Space 8800 2200 550 1650 550 550
Mitsubishi 16 bit Space --- --- 300 1950 300 880
Tabel 2.1.(Lanjutan) Metode pengiriman kode remote control dari berbagai merek [4]
Merek Remote
Panjang
data
Tipe Header Pulse
Header
Space
1 Pulse 1 Space 0 Pulse 0 Space
Onkyo 32 bit Space 8800 2200 550 1650 550 550
Orion 33 bit Space 9000 4450 550 1650 550 550
Panasonic 48 bit Space 4000 1600 400 1200 400 400
Philips 14 bit Shift --- --- 889 889 889 889
Pioneer 32 bit Space 8000 4000 500 1500 500 500
Salora 12 bit Space 50 550 0 375 0 190
Sanyo 32 bit Space 7850 4200 525 1575 525 525
Schneider 12 bit Space --- --- 1250 450 450 1250
Sharp 17 bit Space --- --- 275 1900 275 775
Sony 15 bit Pulse 2200 550 1100 550 550 550
TEAC 32 bit Space 8800 2200 550 1650 550 550
Technics 48 bit Space 4000 1600 400 1200 400 400
Yamaha 32 bit Space 8800 2200 550 1650 550 550
Catatan: Semua angka dalam mikrosecond (s).
2.3 Protokol SONY
Remote control merek SONY secara umum menggunakan protocol yang disebut
pulse modulation [5]. Pulse modulation diawali dengan header dan diikuti dengan 12 bit
data atau LSB (Least Significant Bit) dikirim dulu. Bentuk sinyal pulse modulation dapat
dilihat pada Gambar 2.5.
Header Bit’1’ Bit’0’
Dari Gambar 2.5, T sekitar 550 μs dan frekuensi carrier sebesar 40 KHz. Jarak antara data
satu dengan data berikutnya sekitar 25 ms. Tabel 2.2 merupakan contoh kode remote control
televisi merek SONY.
Tabel 2.2. Contoh kode remote control televisimerek SONY [5]
2.4 Detektor
Infra red
Detektor infra red yang digunakan pada remote control televisi ini adalah GP1U5
dari Sharp [6]. GP1U5 didesain khusus sebagai detektor sinyal infra red dalam aplikasi
Gambar 2.6. Kemasan detektor infra red GP1U5 dari Sharp [6]
Karakteristik kemasan GP1U5 adalah sebagai berikut [6]:
Catu daya 5 volt.
Konsumsi arus sebesar 5 mA.
Dalam kemasan terdapat penguat, band-pass filter, demodulator, dan pembanding.
Bandwidth sebesar 3 dB dari frekuensi 38 KHz.
Keluaran dalam tingkat TTL.
Terdapat rangkaian low-pass filter yang membantu mengurangi gangguan (noise)dari rangkaian catu daya.
GP1U5 merupakan penerima infra red yang didesain khusus sebagai detektor remote
control televisi, VCR, CD, MD, AC, dan lain-lain. GP1U5 tersusun atas rangkaian penguat,
band-pass filter, demodulator, dan pembanding. Dalam kemasan GP1U5 terdapat fotodioda
yang digunakan sebagai detektor infra red. Penguat digunakan untuk menguatkan sinyal dari
fotodioda. Keluaran penguat ini dihubungkan dengan band-pass filter. Band-pass filter ini
digunakan untuk meloloskan frekuensi carrier dari pemancar infra red. Rangkaian
demodulator digunakan untuk meredam sinyal pembawa (carrier) 40 KHz dan meloloskan
digunakan untuk membentuk keluaran ke tingkat TTL. Diagram blok GP1U5 diperlihatkan
dalam Gambar 2.7.
Gambar 2.7. Diagram blok kemasan detektor GP1U5 [6]
Gambar 2.8 menunjukkan keluaran kemasan detektor GP1U5. Kemasan tersebut
dalam tingkat TTL, jadi dapat langsung dihubungkan dengan mikroprosesor atau rangkaian
digital lainnya.
2.5
Mikrokontroler AT89S51
Perbedaan mendasar antara mikrokontroler dan mikroprosesor adalah mikrokontroler
selain memiliki CPU juga dilengkapi dengan memori input-output [7]. Memori input-output
merupakan kelengkapan sebagai sistem minimum mikrokomputer, sehingga sebuah
mikrokontoler dapat dikatakan sebagai mikrokomputer dalam keping tunggal (single chip
microcomputer) yang dapat berdiri sendiri.
Mikrokontroler AT89S51 adalah mikrokontroler ATMEL yang kompatibel penuh
dengan mikrokontroler keluarga MCS-51. Mikrokontroler AT89S51 membutuhkan daya
yang rendah, memiliki performa yang tinggi. Mikrokontroler AT89S51 merupakan
mikrokomputer 8 bit yang dilengkapi 4 Kbyte EPROM (Erasable and Programable Read
Only Memory) dan 128 byte RAM internal. Program memori AT89S51 dapat diprogram
ulang dalam sistem atau dengan menggunakan Program Nonvolately Memory Konvensional.
Dalam sistem mikrokontroler terdapat dua hal yang mendasar, yaitu hardware dan
software yang keduanya saling terkait dan mendukung. Tabel 2.3 adalah keluarga
mikrokontroler MCS-51. Dapat dilihat bahwa mikrokontroler 8031 merupakan versi tanpa
EPROM dari mikrokontroler 8051.
Tabel 2.3. Keluarga mikrokontoler MCS- 51 [7]
PART
NUMBER
ON CHIP CODE
MEMORY
ON CHIP DATA
MEMORY
TIMER
8051 4K ROM 128 BYTES 2
8031 0K 128 BYTES 2
8751 4K EEPROM 128 BYTES 2
8052 8K ROM 256 BYTES 3
8032 0K 256 BYTES 3
8752 8K EPROM 256 BYTES 3
2.5.1 Arsitektur AT89S51
Sebagai single chip yaitu suatu sistem mikroprosesor yang terintegrasi,
mikrokontroler AT89S51 mempunyai konfigurasi sebagai berikut [7]:
1. CPU 8 bit termasuk keluarga MCS-51.
2. 4 Kbyte alamat untuk memory program internal (EPROM).
3. 128 byte memori data dalam (Internal Data Memory/RAM).
4. 8 bit program status word (PSW).
5. 8 bit stack pointer (SP).
6. 32 pin I/O tersusun yaitu port 0-port 3 @ 8 bit.
7. 2 buah timer/counter 16 bit.
8. Data serial full dupleks.
9. Control register.
10.5 sumber interupt.
11.Rangkaian osilator dan clock.
2.5.2 Fungsi
Pin
Mikrokontroler AT89S51
Susunan pin-pin mikrokontroler AT89S51 diperlihatkan pada Gambar 2.9.
a. Port 0
Port 0 merupakan port dua fungsi yang berada pada pin 32-39 dari IC AT 89S51.
Port ini merupakan port I/O 8 bit dua arah yang serba guna. Port ini dapat digunakan
sebagai multlipleks bus data dan bus alamat rendah untuk pengaksesan memori eksternal.
b. Port 1
Port 1 merupakan port I/O yang berada pada pin 1-8. Port ini dapat bekerja dengan
baik untuk operasi bit maupun byte, tergantung dari pengaturan pada software.
c. Port 2
Port 2 merupakan port I/O serba guna yang berada pada pin 21- 28. Port ini dapat
juga digunakan sebagai bus alamat byte tinggi untuk rancangan yang melibatkan
pengaksesan memori eksternal.
d. Port 3
Port 3 merupakan port I/O yang memiliki dua fungsi yang berada pada pin 10-17.
Port ini mempunyai multi fungsi, seperti yang terdapat pada Tabel 2.4.
e. PSEN ( Programable Store Enable)
PSEN adalah sebuah sinyal keluaran yang terdapat pada pin 29. Fungsinya adalah
sebagai sinyal kontrol untuk memungkinkan mikrokontroler membaca program (code) dari
memori eksternal. PSEN dapat juga dikatakan sebagai sinyal control yang menghubungkan
memori program eksternaldengan bus selama pengaksesan.
f. ALE ( Address Latch Enable)
Sinyal output ALE yang berada pada pin 3.0. Fungsinya sama dengan ALE pada
alamat dan bus data. Sinyal ALE juga dipergunakan untuk menahan alamat memori
eksternalselama pelaksanaan instruksi.
Tabel 2.4. Fungsi alternarif Port 3 [7]
BIT NAMA BIT
ADDRES FUNGSI ALTERNATIF P3.0 P3.1 P3.2 P3.3 P3.4 P3.5 P3.6 P3.7 RXD TXD INT0 INT 1 T0 T1 WR RD B0H B1H B2H B3H B4H B5H B6H B7H
Penerima data pada port serial
Pemancar data pada port serial
Eksternal interupsi 0
Eksternal interupsi 1
Input timer/counter eksternal
Input timer/counter
Sinyal pembacaan memori data eksternal
Sinyal penulisan memori data eksternal
g. EA ( External Acces)
Sinyal EA terdapat pada pin 3.1 yang dapat diberikan logika rendah (ground) atau
logika tinggi (+5V). Jika EA diberikan logika tinggi, maka mikrokontroler akan mengakses
program dari ROM internal (EEPROM/flash memori). Jika EA diberi logika rendah, maka
mikrokontroler akan mengakses program dari memori eksternal.
h. RST ( Reset)
Input reset pada pin 9 adalah reset master untuk AT89S51. Perubahan tegangan dari
i. Osilator
Osilator yang disediakan pada chip terbangun dari kristal yang dihubungkan pada pin
18 (X2) dan pin 19 (X1) sebesar 12 MHz. Bentuk rangkaian osilator eksternal AT89S51
dapat dilihat pada Gambar 2.10.
C 2 3 0 p f X T A L
X T A L 2
C 1 3 0 P F
X T A L 1 G N D
Gambar 2.10. Osilator eksternalAT89S51 [7]
j. Power
AT89S51 dioperasikan dengan tegangan supply +5V, pin Vccberada pada pin 40 dan
Vss (ground) pada pin 20.
2.5.3 Organisasi Memori
Mikrokontroler AT89S51 mengimplementasikan ruang memori yang terpisah antara
program (code) dan data [7]. Program data bisa merupakan memori internal, tetapi juga
dapat diperluas dengan memori eksternal sampai 64 Kbyte memori program dan 64 Kbyte
memori data.
Memori internal terdiri dari ROM/flash memori dan RAM data di dalam chip. RAM
berisi susunan general purposes storage, bit addressable storage, register bank dan special
function register. Ruang internal pada mikrokontroler AT89S51 dibagi menjadi :
1. Register bank (00H-1FH), bit addressable
2. Bit adresable RAM (20H-2FH)
3. General Purpose RAM (30H-7FH)
2.5.4
Timer dan Counter
Mikrokontroler AT89S51 mempunyai dua buah timer/counter 16 bit yang dapat
diatur melalui software, yaitu timer/counter 0 dan 1. Periode waktu timer/counter secara
umum ditentukan dengan persamaan berikut [7]:
Untuk timer/counter 8 bit
T = (255-TLX) *1/(F osc/12)
dengan TLX adalah isi register TLO atau TL1.
Untuk timer/counter 16 bit
T = (65535-THX*TLX) *1/(Fosc/12)
dengan THX adalah isi register TH0 atau TH1.
Pengontrolan kerja dari bit- bit pada timer control dan keterangan register TCON dapat
dilihat pada Gambar 2.11 dan Tabel 2.5.
MSB LSB
TF1 TR1 TF0 TR0 IE1 IT1 IE0 IT0
Gambar 2.11. Bit-bit pada timer control [7]
Pengontrolan pemilihan mode operasi timer/counter dengan kombinasi MO dan M1 pada
register TMOD dapat dilihat pada Gambar 2.12 dan Tabel 2.6 .
MSB LSB
GATE C/T M1 M0 GATE C/T M1 M0
Tabel 2.5.Keterangan register TCON [7]
Simbol Posisi Fungsi
TF1 TCON. 7 Timer 1 over flow flag, diset oleh hardware saat
timer/counter menghasilkan overflow
TR1 TCON. 6 Bit untuk menjalankan timer 1, diset oleh software
untuk membuat timer ON/OFF.
TF 0 TCON. 5 Timer 0 over flag, diset oleh hardware
TR 0 TCON. 4 Bit untuk menjalankantimer 0, diset oleh software
untuk membuat timer ON/OFF.
IE 1 TCON. 3 Eksternal interupt 1 edge flag.
IT 1 TCON. 2 Interupt 1 type control bit, diset oleh software
untuk menspesifikasi sisi turun/level rendah dari
intrupsi eksternal.
IE 0 TCON. 1 Eksternal interupt 0 edge flag.
IT 0 TCON. 0 Interupt 0 type control bit.
GATE pada saat TR dalam TCON diset 1, timer/counter X akan berjalan ketika
timer dikontrol oleh software. C/T adalah pemilhan fungsi timer atau counter. Clear 0
digunakan untuk operasi timer dengan masukan dari sistem clock internal. Set 1 digunakan
untuk operasi counter dengan masukan dari pin TO dan T1. M1 merupakan bit pemilih mode
1 dan M0 merupakan bit pemilih mode 0.
Mode yang akan digunakan pada register TMOD adalah sebagai berikut [7]:
Mode 0
Dalam kode ini register timer disusun sebagai register 13 bit, setelah semua perhitungan
Dengan membuat GATE sama dengan 1, timer dapat dikontrol oleh masukan INT 1
untuk fasilitas pengukuran lebar pulsa.
Tabel 2.6. Kombinasi MO dan M1 pada register TMOD [7]
M1 M0 Mode Operasi
0 0 0 Timer 13 bit
1 1 1 Timer/counter 16 bit
1 0 2 Timer aoto reload 8 bit ( pengisian otomatis)
1 1 3 TLO adalah timer/counter 8 bit yang dikontrol
oleh control bit standar timer 0. THO adalah
timer 8 bit dan di kontrol oleh bit timer 1
Mode 1
Mode1 sama denganmode 0 kecuali register timer akan bekerja dalam register 16 bit.
Mode 2
Mode 2 menyusun register timer sebagai 8 bit counter. Over flow dari TL1 tidak hanya
mengatur TF1, tetapi juga mengisi TL1 dengan isi TH 1 yang diatur secara software.
Pengisian ini tidak mengubah TH1.
Mode 3
Timer 1 dalam mode 3 hanya memegang hitungan yang efeknya sama seperti
mengatur TR sama dengan 0. Timer 0 dalam mode3 menetapkan TL 0 dan TH0 sebagai 2
counter terpisah. TL0 menggunakan control bit timer 0, yaitu C/T, GATE, TR0, INT0, DAN
2.5.5
Sistem Interupsi
Mikrokontroler 8051 mempunyai 5 buah sumber interupt yang dapat membangkitkan
interupt reguest adalah sebagai berikut [7]:
INT0 : permintaan interupt luar dari kaki P3.2
INT 1 : permintaan interupt luar dari kaki P3.3
Timer/counter 0 : bila terjadi overflow Timer/counter 1 : bila terjadi overflow
Port serial : bila pengiriman/peneriman satu frame telah lengkap
Saat terjadi interupt mikrokontroler secara otomatis akan menuju ke subrutin pada
alamat tersebut. Setelah interupt service selesai dikerjakan, mikrokontroler akan
mengerjakan program semula. Dua sumber interupsi merupakan sumber interupsi
eksternal/INT1. Kedua interupsi eksternal dapat mengaktifkan level aktif transisi tergantung
isi IT0 dan IT1. Pada register TCON, interupsi timer 1dan timer 0 aktif pada saat timer
yang sesuai mengalami rool-over. Interupt serial dibangkitkan dengan melakukan operasi
OR pada R1 dan T1. Setiap sumber interupsi dapat enable atau disable di dalam software.
Tingkat prioritas semua sumber interupsi dapat diprogram sendiri- sendiri dengan set
atau clear bit pada SFR IP (Interupt Priority). Interupsi tingkat rendah dapat diinterupsi oleh
interupsi yang mempunyai tingkat interupsi yang lebih tinggi, tetapi tidak sebaliknya.
Walaupun demikian, interupsi yang tingkat interupsinya lebih tinggi tidak bisa
menginterupsi sumber interupsi yang lain.
2.6 LCD (
Liquid Crystal Display )
LCD ( Liquid Crystal Display ) adalah suatu penampil dari bahan cairan kristal yang
pengoperasiannya menggunakan sistem dot matriks [8]. Perancangan alat ini menggunakan
karakter yang dapat ditampilkan sekaligus adalah sebanyak 32 karakter. Masing-masing
karakter tersebut terbentuk dari susunan titik yang berukuran 8 baris dan 5 kolom dot.
(a) (b)
Gambar 2.13.(a)Bentuk LCD 16 x 2. (b)Pin LCD 16 ×2 [8]
LCD terdiri dari 8 jalur data, 3 jalur kendali, dan fasilitas pengaturan kontras serta
backlight. LCD ini dapat dikendalikan dengan mikrokontroler atau mikroprosesor. Deskripsi
pin LCD tersebut dapat dilihat pada Tabel 2.7.
1. DB0 s/d DB7 merupakan jalur data yang dipakai untuk menyalurkan kode ASCII
maupun perintah pengatur kerja LCD tersebut.
2. RS (register select) merupakan pin yang dipakai untuk membedakan jenis data yang
dikirim ke LCD. Jika RS berlogika ‘0’, maka data yang dikirim adalah perintah untuk
mengatur kerja LCD tersebut. Jika RS berlogika ‘1’, maka data yang dikirim adalah
kode ASCII yang ditampilkan.
3. DB0 s/d DB7 merupakan jalur data yang dipakai untuk menyalurkan kode ASCII
Tabel 2.7. Pin tampilan LCD [8]
4. R/W (read/write) merupakan pin yang digunakan untuk mengaktifkan pengiriman
dan pengambilan data ke dan dari LCD. Jika R/W berlogika ‘0’, maka akan diadakan
pengiriman data ke LCD. Jika R/W berlogika ‘1’, maka akan diadakan pengambilan
data dari LCD.
5. E (enable) merupakan sinyal sinkronisasi. Jika E berubah dari logika ‘1’ ke ‘0’, maka
data di DB0 s/d DB7 akan diterima atau diambil dari port mikrokontroler.
6. VCC dan GND sebagai terminal power supply (+5V).
2.7 TRIAC (
TRIode Alternating Current )
TRIAC (Triode Alternating Current) merupakan sebuah thyristor dua arah yang
sangat ideal untuk menghantarkan arus bolak balik (AC) [9]. Simbol TRIAC dan
ekuivalensinya dapat dilihat pada Gambar 2.14 dan karakteristik TRIAC dapat dilihat pada
Terminal MT1 dan MT2 berfungsi sebagai saklar yang mengatur aliran arus beban yang
berasal dari sumber tegangan Alternate Current (AC), sedangkan gate berfungsi sebagai
pemicu (trigger).
Gambar 2.14. Simbol dan ekuivalensi TRIAC [9]
2.7.1 Karakteristik TRIAC
TRIAC memiliki karakteristik swicthing seperti pada SCR, kecuali bahwa TRIAC
dapat berkonduksi dalam berbagai arah. TRIAC dapat digunakan untuk mengontrol aliran
arus dalam rangkaian AC. Elemen seperti penyearah dalam kedua arah menunjukkan
kemungkinan dua aliran arus antara terminal utama M1 dan M2. Pengaturan dilakukan
dengan menerapkan sinyal antara gate (gerbang) dan M1. Gamabar 2.15 merupakan
karakteristik TRIAC [9].
Karena dapat bersifat konduktif dalam dua arah, biasanya TRIAC digunakan untuk
mengendalikan fasa arus AC (contohnya kontroler tegangan AC). Selain itu, karena TRIAC
merupakan devais bidirektional, terminalnya tidak dapat ditentukan sebagai anode atau
katode. Jika terminal MT2 positif terhadap terminal MT1, TRIAC dapat dimatikan dengan
memberikan sinyal gerbang positif antara gerbang G dan MT1. Sebaliknya jika terminal
MT2 negatif terhadap MT1 maka TRIAC akan dapat dihidupkan dengan memberikan sinyal
pulsa negatif antara gerbang G dan terminal MT1. Tidak perlu untuk memiliki kedua sinyal
gerbang positif dan negatif dan TRIAC akan dapat dihidupkan baik dengan sinyal positif
atau negatif [9].
Dalam prakteknya sensitifitas bervariasi antara satu kuadran dengan kuadran lain.
TRIAC biasanya beroperasi di kuadran I (+) / tegangan dan arus gerbang positif atau di
kuadran III (-) / tegangan dan arus gerbang negatif [9].
Pada umumnya rangkaian TRIAC dilengkapi dengan rangkaian snubber. Rangkaian
snubber berfungsi untuk mencegah lonjakan sinyal transient yang timbul secara tiba-tiba
diantara kedua terminal utama TRIAC yaitu MT1 dan MT2. Rangkaian snubber ini sangat
penting, tetapi TRIAC dapat ON secara tiba-tiba walaupun tidak ada sinyal trigger yang
masuk pada gate. Hal ini dapat disebabkan oleh besarnya sinyal yang masuk pada TRIAC
saat awal rangkaian TRIAC dinyalakan [10].
47
Load
IT
TRIAC VT
Vmain
1uF
Rangkaian sederhana snubber pada TRIAC dapat dilihat pada Gambar 2.16.
Kapasitor pada rangkaian snubber berfungsi untuk merendahkan atau menurunkan sinyal
frekuensi tinggi yang masuk pada TRIAC saat awal rangkaian TRIAC dinyalakan. Resistor
pada rangkaian snubber berfungsi untuk membatasi arus discharge kapasitif yang besar
ketika TRIAC menyala pada kondisi operasi tidak normal. Resistor tidak digunakan untuk
menahan lonjakan sinyal transient yang besar saat awal rangkaian TRIAC dinyalakan, tetapi
hanya untuk membatasi arus discharge kapasitif besar dari kapasitor yang melalui MT1 dan
MT2 pada saat operasi tidak normal. Perhitungan untuk rangkaian RC snubber yang
digunakan dalam penelitian ini, dapat dilihat pada datasheet AN437 Application note (RC
BAB III
PERANCANGAN DAN PEMBUATAN ALAT
Pembuatan dasar kerja alat “Aplikasi Remote Control Televisi Sebagai Pengendali
Beban” membutuhkan perancangan software dan hardware. Perancangan peralatan yang
dibuat meliputi penyusunan diagram blok, rancangan hardware, dan pemograman
mikrokontroler (flowchart).
3.1.
Diagram Blok
Diagram blok sistem pengontrol peralatan rumah tangga dengan remote control
televisi berbasis mikrokontroler AT89C51 dapat dilihat dalam Gambar 3.1.
Gambar 3.1. Blok diagram sistem Penjelasan dari masing-masing blok adalah sebagai berikut:
1. Infra red module receiver, berfungsi untuk menerima kode-kode scan tombol dari
remote control televisi yang digunakan. Dari scan kode ini nantinya akan digunakan
untuk mengaktifkan ataupun mematikan peralatan listrik yang ada di rumah.
2. Mikrokontroler AT89S51 berfungsi sebagai pengolah data dari keseluruhan sistem.
Mikrokontroler ini mempunyai internal ROM 4 Kbyte sehingga tidak memerlukan
memori program eksternal, mempunyai 4 port I/O 8 bit dan bekerja dengan tegangan
catu single supply 5 volt.
3. Rangkaian driver TRIAC berfungsi sebagai penggerak dari peralatan listrik agar
dapat dikontrol oleh mikrokontroler.
4. Lampu digunakan sebagai beban yang akan dikontrol oleh remote control televisi.
5. Remote control televisi yang digunakan adalah remote control televisi yang ada di
rumah.
3.2
Perancangan
Hardware
3.2.1
Penerima
Infra Red
Penerima infra red berfungsi untuk menangkap atau menerima sinyal remote control
televisi. Blok ini menggunakan detektor infra red yang mempunyai keluaran dalam tingkat
TTL. Skema rangkaian penerima infra red ditunjukkan dalam Gambar 3.2 [11].
Gambar 3.2.Rangkaian penerima infra red [11]
G
N
D
1
V
C
C
2
O
U
T
3
IC1 GP1U5
R1 22K C1
47/16
VCC
Detektor infra red membutuhkan tegangan sebesar 5 volt untuk mencatu rangkaian
di dalamnya. C1 pada rangkaian di atas digunakan untuk mengurangi ripple yang diakibatkan
oleh pemberian catu daya dari luar. Sedangkan R1 digunakan sebagai pull-up keluaran
detektor infra red yang mempunyai nilai resistansi sebesar 22 K.
3.2.2 Rangkaian Osilator
Kecepatan proses yang dilakukan oleh mikrokontroler ditentukan oleh sumber clock
(pewaktuan) yang mengendalikan mikrokontroler tersebut. Gambar 3.3 adalah rangkaian
osilator internal yang sudah tersedia di dalam chip mikrokontroler. Frekuensi osilatornya
ditentukan dengan cara menghubungkan kristal pada pin XTAL1 dan XTAL2 serta dua buah
kapasitor ke ground. Kristal yang digunakan memiliki frekuensi dari 0 sampai 12 MHz.
Besar kapasitansinya disesuaikan dengan spesifikasi pada lembar data mikrokontroler yaitu
33 pF [12]. Pemilihan besar frekuensi kristal disesuaikan dengan pemilihan kecepatan yang
diharapkan untuk transfer data melalui pinserial interface mikrokontroler. Dengan memakai
kristal 11,059 MHz, maka satu siklus mesin membutuhkan waktu selama 1,08 mikrodetik
atau 1/11,059 MHz x 12 periode.
3 3 p F
X T A L 1
3 3 p F
X T A L 2
1 1 . 0 5 9
Gambar 3.3. Rangkaian Osilator [12]
3.2.3
Rangkaian LCD
Komunikasi mikrokontroler AT89C51 dengan LCD yang ada pada Gambar 3.4, tidak
LCD LMB162ABC memiliki driver yang dapat mengubah data ASCII pada output
mikrokontroler menjadi tampilan karakter. Potensio yang terdapat pada LCD berfungsi
untuk mengatur kontras karakter yang tampil. Nilai potensio yang digunakan sebesar 10 KΩ,
yang sesuai dengan datasheet. Konfigurasi pin LCD dengan port mikrokontroler dapat
dilihat pada Tabel 3.1.
Perancangan alat penampil (LCD karakter) yang digunakan berfungsi untuk
menampilkan instruksi dari remote control televisi. Instruksi yang ditampilakan pada
perancangan ini terdiri dari LOAD dan TIME. LOAD digunakan untuk menampilkan beban
yang dipilih oleh user dan TIME digunakan untuk menampilkan waktu dari beban yang
dipilih. Contoh tampilan beban dan waktu pada LCD dapat dilihat pada Tabel 3.2.
I R S E N S O R
A T 8 9 S 5 1
9 1 8 1 9 2 9 3 0 3 1 1 2 3 4 5 6 7 8 2 1 2 2 2 3 2 4 2 5 2 6 2 7 2 8 1 0 1 1 1 2 1 3 1 4 1 5 1 6 1 7 3 9 3 8 3 7 3 6 3 5 3 4 3 3 3 2
R S T X T A L 2 X T A L 1
P S E N A L E / P R O G E A / V P P
P 1 . 0 P 1 . 1 P 1 . 2 P 1 . 3 P 1 . 4 P 1 . 5 P 1 . 6 P 1 . 7
P 2 . 0 P 2 . 1 P 2 . 2 P 2 . 3 P 2 . 4 P 2 . 5 P 2 . 6 P 2 . 7
P 3 . 0 / R X D P 3 . 1 / T X D P 3 . 2 / I N T O
P 3 . 3 / I N T 1
P 3 . 4 / T O P 3 . 5 / T 1
P 3 . 6 / W R P 3 . 7 / R D
P 0 . 0 P 0 . 1 P 0 . 2 P 0 . 3 P 0 . 4 P 0 . 5 P 0 . 6 P 0 . 7
1 2 3 4 5 6 7 8 9
1 0 1 1 1 2 1 3 1 4 1 5 1 6
L C D
3 3 p F 1 1 . 0 5 9
1 0 u F 3 3 p F
K e d r i v e r T R I A C
V C C
1 0 0 n F 1 0 K
1
3
2
K e d r i v e r T R I A C
K e d r i v e r T R I A C
8 . 2 K
Tabel 3.1. Konfigurasi pin LCD dan mikrokontroler
Pin LCD Port Mikrokontroler
RS P2.6
E P2.7
D0 P2.0
D1 P2.1
D2 P2.2
D3 P2.3
Tabel 3.2. Tampilan beban dan waktu pada LCD
L O A D : 1 2 3
T I M E : x x x x x x
Keterangan : 1,2,3 adalah beban dan xx untuk tampilan waktu
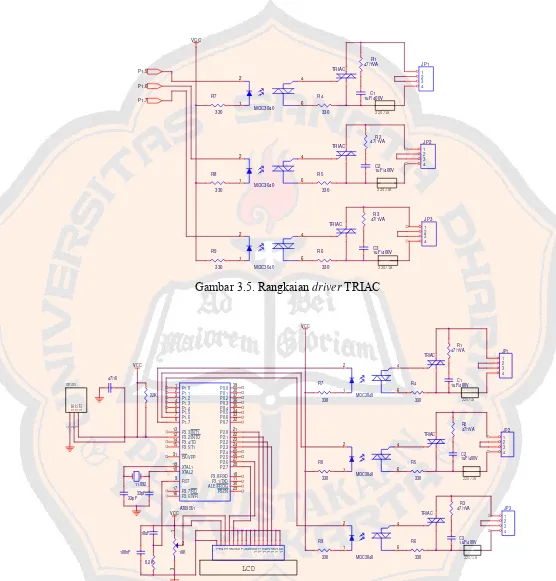
3.2.4
Rangkaian
Driver
TRIAC
Driver TRIAC yang digunakan adalah tipe MOC3040. Driver TRIAC tipe
MOC3040 memiliki bentuk seperti IC (Integrated Circuit) dengan 6 kaki pin yang terdiri
dari sebuah LED (Light Emitting Diode) dan sebuah TRIAC. Driver ini termasuk jenis
optocoupler sehingga relatif aman jika terjadi ketidaknormalan pada bagian beban.
Optocoupler ini berfungsi untuk mengisolasi atau mengamankan mikrokontroler dari tegangan tinggi 220 VAC. Rangkaian driver TRIAC dapat dilihat pada Gambar 3.5.
Pengaktifan TRIAC melalui driver ini adalah dengan pulsa low yang berasal dari
port 1.5 s/d port 1.7 mikrokontroler. Jika ada pulsa low (0 volt) pada pin kaki 2, maka akan
terjadi beda potensial antara pin kaki 1 dan 2. Hal ini mengakibatkan arus mengalir dan
dioda dalam MOC3040 memancarkan cahaya sehingga bilateral switch ON. Arus yang
mengalir dari pin kaki 6 ke 4 akan mengaktifkan TRIAC menjadi ON, sehingga TRIAC
dapat mengalirkan arus.
Rangkaian diver tipe MOC3040 memiliki tegangan LED sebesar 1,6 Volt, arus LED
sebesar 10 mA, dan Vcc sebesar 5 Volt [13]. Untuk mencari resistor pada rangkaian driver
LED LED CC I V V
R= − (3.1)
Ω = − = 340 01 , 0 6 , 1 5 A V V
Karena nilai resistor sebesar 340 Ω tidak ada di pasaran, maka yang digunakan adalah
resistor sebesar 330 Ω.
MOC3040 bukan sebagai solid state relay atau pengendali lampu dimmer untuk
mengendalikan laju data dua arah. Fungsi resistor 330 ohm pada MOC3040 adalah untuk
pembatas arus pada trigger dalam mengendalikan laju data dan membatasi arus yang
mengalir melalui dioda. Untuk tegangan rendah, arus yang mengalir maksimum 30 mA. Jika
hambatan dioda dalam MOC3040 diabaikan dan tegangan masukan (Vin) dari
mikrokontroler sebesar 5 Volt, maka arus yang mengalir dapat dihitung sebagai berikut [13]:
R V I = in
(3.2) mA A V 15 , 15 15 015 , 0 330 5 = = Ω =
Arus 15,15 mA bagi mikrokontroler sudah dianggap besar, sehingga pengaktifan MOC3040
dengan active low agar mikrokontroler tidak melakukan sourcing.
Driver MOC3040 dalam perancangan ini merupakan penguat awal, sehingga
diperlukan penguat akhir yang berfungsi agar tegangan keluran yang dihasilkan untuk beban
stabil. Penguat akhir ini pada dasarnya adalah rangkaian seri RC yang ditambahkan
komponen TRIAC sebagai pengatur tegangan pada beban. Rangkaian penguat akhir untuk
T R I A C
2 2 0 V S O U R C E V O L T A G E
1
2
1 u F / 4 0 0 V
R 6
3 3 0 M O C 3 0 4 0
1 2
6 4
R 3 4 7 / 1 V A
2 2 0 / 1 A
R 9
3 3 0
B E B A N P 1 . 7
V C C
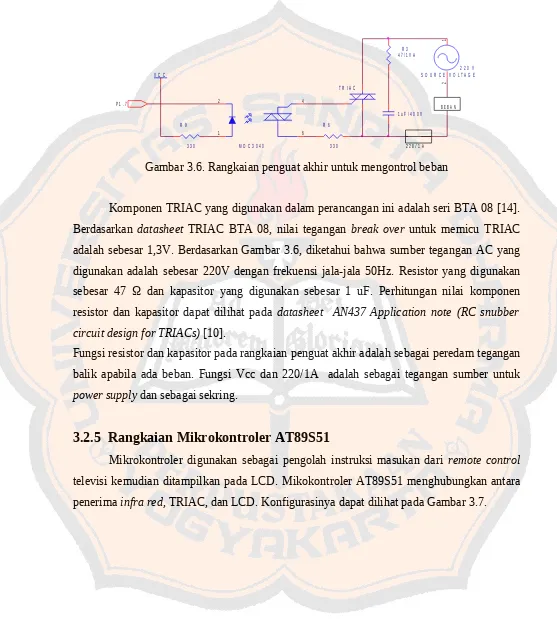
Gambar 3.6. Rangkaian penguat akhir untuk mengontrol beban
Komponen TRIAC yang digunakan dalam perancangan ini adalah seri BTA 08 [14].
Berdasarkan datasheet TRIAC BTA 08, nilai tegangan break over untuk memicu TRIAC
adalah sebesar 1,3V. Berdasarkan Gambar 3.6, diketahui bahwa sumber tegangan AC yang
digunakan adalah sebesar 220V dengan frekuensi jala-jala 50Hz. Resistor yang digunakan
sebesar 47 Ω dan kapasitor yang digunakan sebesar 1 uF. Perhitungan nilai komponen
resistor dan kapasitor dapat dilihat pada datasheet AN437 Application note (RC snubber
circuit design for TRIACs) [10].
Fungsi resistor dan kapasitor pada rangkaian penguat akhir adalah sebagai peredam tegangan
balik apabila ada beban. Fungsi Vcc dan 220/1A adalah sebagai tegangan sumber untuk
power supply dan sebagai sekring.
3.2.5 Rangkaian Mikrokontroler AT89S51
Mikrokontroler digunakan sebagai pengolah instruksi masukan dari remote control
televisi kemudian ditampilkan pada LCD. Mikokontroler AT89S51 menghubungkan antara
MOC3040 1 2 6 4 P1.7 VCC JP2 1 2 3 4 MOC3040 1 2 6 4 R5 330 TRIAC JP3 1 2 3 4 TRIAC R6 330 220/1A TRIAC R1 47/1VA 220/1A R7 330 220/1A R2 47/1VA R8 330 P1.5 R3 47/1VA R9 330 C1 1uF/400V P1.6 MOC3040 1 2 6 4 JP1 1 2 3 4 C2 1uF/400V R4 330 C3 1uF/400V
Gambar 3.5. Rangkaian driver TRIAC
TRIAC 100nF 220/1A C1 1uF/400V 220/1A 33pF R4 330 220/1A AT89S51 9 18 19 29 30 31 1 2 3 4 5 6 7 8 21 22 23 24 25 26 27 28 10 11 12 13 14 15 16 17 39 38 37 36 35 34 33 32 RST XTAL2 XTAL1 PSEN ALE/PROG EA/VPP P1.0 P1.1 P1.2 P1.3 P1.4 P1.5 P1.6 P1.7 P2.0 P2.1 P2.2 P2.3 P2.4 P2.5 P2.6 P2.7 P3.0/RXD P3.1/TXD P3.2/INTO P3.3/INT1 P3.4/TO P3.5/T1 P3.6/WR P3.7/RD P0.0 P0.1 P0.2 P0.3 P0.4 P0.5 P0.6 P0.7 3
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
JP1 1 2 3 4 R6 330 LCD R2 47/1VA R1 47/1VA OUT VCC R3 47/1VA 1 TRIAC VCC 2 JP2 1 2 3 4 22K MOC3040 1 2 6 4 10K 1 3 2 11.092 VCC R7 330 GP1U5 TRIAC 8.2K 47/16 R5 330 MOC3040 1 2 6 4 10uF R8 330 GND 33pF MOC3040 1 2 6 4 C3 1uF/400V VCC JP3 1 2 3 4 R9 330 C2 1uF/400V
start
Inisialisasi port mikrokontroler
Tombol program (+)
Tombol program (-)
Tombol volume (+)?
Matikan beban
end Tampilan LCD
T
Y
Y T
Y T
Pengaturan waktu
Pengaturan beban
Gambar 3.8. Flowchart Program Utama
Pemograman mikrokontroler digunakan untuk mengolah instruksi masukan dari
penerima (receiver). Flowchart program utama ditunjukkan pada Gambar 3.8. Proses yang
pertama kali dilakukan adalah membaca instruksi masukan dari remote control televisi.
Kode instruksi masukan disimpan pada flash memory yang berkapasitas 4 Kbyte. Pada
proses ini, terjadi inisialisasi port mikrokontroler yang digunakan remote control televisi
televisi aktif, dilakukan pengecekan tombol program (+). Jika user menginginkan
pengecekan tombol program (+), maka remote control televisi akan mengatur beban.
Setelah beban diatur, akan dilukakan pengecekan lagi untuk tombol program (-). Jika user
menginginkan pengecekan tombol program (-), maka beban akan mati dan selesai. Jika user
tidak menginginkan pengecekan tombol program (-), maka akan kembali ke proses
pengecekan tombol program (+) dan menunggu sampai ada masukan lagi dari user. Pada
saat pengecekan tombol program (+) jika user tidak menginginkan pengecekan tombol
program (+), maka akan terjadi pengecekan lagi untuk tombol volume (+). Jika user
menginginkan pengecekan tombol volume (+), maka akan terjadi proses pengaturan waktu
dan terjadi pengecekan tombol program (-). Untuk proses pengecekan tombol program (-)
selanjutnya akan sama seperti cara kerja diatas. Jika user tidak menginginkan pengecekan
tombol volume (+), maka akan kembali ke proses pengecekan tombol program (+) dan
menunggu sampai ada masukan lagi dari user.
3.3.1 Pengolahan Data Beban
Instruksi-instruksi masukan yang digunakan pada perancangan ini adalah tombol
program (+) dan tombol program (-). Semua instruksi yang digunakan telah dikodekan
dalam bentuk bilangan hexadecimal dan disimpan pada flash memory, misalnya untuk kode
instruksi pada tombol program (+) adalah 90H. Tombol program (+) berfungsi untuk
memilih beban agar beban dapat ON. Tombol program (-) berfungsi untuk memilih beban
start
Tombol program (+)
Variabel aktifkan (+1)
Pengaktifan beban Tombol
program (-)
Variabel aktifkan (-1)
Non aktifkan beban
Tampilan LCD
Y
T T
Y
Gambar 3.9. Flowchart Tombol Program (+) dan Tombol Program (-) untuk
pengaturan beban
Pada pengaturan beban ini pertama kali jika user menekan tombol program (+), maka
akan terjadi penambahan beban yang akan diaktifkan. Setelah beban tersebut aktif, maka
akan ditampilkan pada tampilan LCD dan setelah itu akan kembali ke pengecekan tombol
program (+) dan menunggu sampai ada masukan lagi dari user. Jika user tidak menekan
tombol program (+), maka beban pertama akan langsung ON dan setelah itu akan terjadi
pengecekan untuk tombol program (-). Jika user memilih tombol program (-), maka akan
terjadi pengurangan untuk pengaktifan beban. Setelah beban yang dipilih aktif, maka akan
ditampilkan pada LCD dan akan kembali ke pengecekan tombol program (+) dan menunggu
sampai ada masukan lagi dari user. Jika user memilih tombol program (-), maka akan
ditampilkan pada LCD dan akan kembali ke pengecekan tombol program (+) dan menunggu
start
ON beban 1? Aktifkan beban 1 Tampilkan beban 1
Tampilan LCD
end ON beban 2?
ON beban 3?
Aktifkan beban 2
Aktifkan beban 3
Tampilkan beban 2
Tampilkan beban 3
Y
Y
Y T
T
Gambar 3.10. Flowchart Pengaktifan beban
Gambar 3.10 menunjukkan flowchart untuk mengaktifakan beban. Proses kerjanya
pertama kali jika user ingin menghidupkan beban satu, maka beban satu akan ON dan akan
ditampilkan pada LCD. Jika user tidak ingin menghidupkan beban satu, maka akan terjadi
pengecekan pada beban dua. Untuk beban dua dan beban tiga proses kerjanya sama seperti
start
OFF beban 1? Non aktifkan beban 1
Tampilkan beban 1
Tampilan LCD
end OFF beban 2?
OFF beban 3?
Non aktifkan beban 2
Non aktifkan beban 3
Tampilkan beban 2
Tampilkan beban 3
Y
Y
Y T
T
Gambar 3.11. Flowchart Non aktifan beban
Gambar 3.11 menunjukkan flowchart untuk non aktifakan beban. Jika user ingin
mematikan beban satu, maka beban satu akan OFF dan akan ditampilkan pada LCD. Jika
user tidak ingin mematikan beban satu, maka akan terjadi pengecekan pada beban dua.
Untuk beban dua dan beban tiga proses kerjanya sama seperti beban satu.
3.3.2 Pengolahan Data Waktu
Pengolahan data waktu merupakan lanjutan dari pengolahan data beban. Pada
pengolahan data waktu ini, yang digunakan adalah tombol volume (+) dan volume (-).
Tombol volume (+) dan volume (-) berfungsi sebagai pewaktuan beban. Flowchart volume
start
Tombol volume (+)
Tampilan LCD
Pengaktifan waktu beban
Tombol volume (-)
Variabel pengaturan waktu
(+1)
Variabel pengaturan waktu
(-1)
Non aktifan waktu beban
T
Y Y
T
Gambar 3.10. Flowchart volume (+) dan volume (-) sebagai pengaturan waktu pada beban
Pada pengaturan waktu ini jika user menekan tombol volume (+), maka akan terjadi
penambahan waktu yang akan diatur. Setelah waktu tersebut ON, maka akan ditampilkan
pada tampilan LCD dan setelah itu akan kembali ke pengecekan tombol volume (+) dan
menunggu sampai ada masukan lagi dari user. Jika user tidak menekan tombol volume (+),
maka akan langsung ON waktu pada beban pertama dan setelah itu akan terjadi pengecekan
untuk tombol volume (-). Jika user memilih tombol volume (-), maka akan terjadi
pengurangan waktu untuk beban. Setelah waktu yang dipilih telah diatur, maka akan
ditampilkan pada LCD dan akan kembali ke pengecekan tombol volume (+) dan menunggu
sampai ada masukan lagi dari user. Jika user memilih tombol volume (-), maka akan
ditampilkan pada LCD dan akan kembali ke pengecekan tombol volume (+) dan menunggu
Gambar 3.11. menujukkan flowchart pengaktifan waktu pada beban. Jika user ingin
meghidupkan beban satu, maka akan terjadi proses pengaturan waktu. Jika user tidak ingin
meghidupkan beban satu, maka akan terjadi pengecekan untuk menghidupkan waktu pada
beban dua. Proses berikutnya untuk menghidupkan waktu pada beban dua dan tiga sama
seperti menghidupkan waktu pada beban satu.
start
On timer beban 1?
On timer beban 1?
On timer beban 1?
Y
Y
Y T
T
T
end
Pengaturan waktu
Gambar 3.11. Flowchart pengaktifan waktu pada beban
Gambar 3.12. menujukkan flowchart pengaturan waktu untuk pengaktifan waktu
pada beban. Jika tombol volume (+) yang dipilih oleh user, maka beban yang dipilih akan
diproses untuk diatur waktu hidupnya (ON) setiap kenaikkan 10 menit sampai perbandingan
waktu maksimal selama 60 menit. Jika waktu yang dipilih lebih dari 60 menit, maka
pengaturan waktu akan kembali menjadi 00. Jika waktu yang dipilih user tidak lebih dari 60
start
Tombol volume (+)
increment waktu 10 menit Y
T
end
Compare waktu 70 menit
Waktu menjadi 00 Y
T
Gambar 3.12. Flowchart pengaturan waktu untuk pengaktifan waktu pada beban
start
OFF timer beban 1?
OFF timer beban 2?
OFF timer beban 3?
Y
Y
Y T
T
T
end
Pengaturan waktu
Gambar 3.13. Flowchart non-aktifan waktu pada beban
Gambar 3.13. menujukkan flowchart non-aktifan waktu pada beban. Jika user ingin
mematikan beban satu, maka akan terjadi proses pengaturan waktu. Jika user tidak ingin
dua. Proses berikutnya untuk mematikan waktu pada beban dua dan tiga sama seperti
mematikan waktu pada beban satu.
start
Tombol volume (-)
dicrement waktu 10 menit
Y
T
end
Compare waktu 00 menit
Waktu menjadi 60 menit
Y T
Gambar 3.14. Flowchart pengaturan waktu untuk non-aktifan waktu pada beban
Gambar 3.14. menujukkan flowchart pengaturan waktu untuk non-aktifan waktu
pada beban. Jika tombol volume (-) yang dipilih oleh user, maka beban yang dipilih akan
diproses untuk diatur waktu matinya (OFF) setiap penurunan 10 menit sampai perbandingan
waktu maksimal selama 00 menit. Jika waktu yang dipilih kurang dari 00 menit, maka
pengaturan waktu akan kembali menjadi 60 menit. Jika waktu yang dipilih user tidak
kurang dari 00 menit, maka pewaktuan beban akan selesai sampai waktu yang diingikan.
3.3.3
Tampilan Pada LCD
Penggunaan LCD adalah sebagai penampil. Untuk dapat menampilkan beban dan
pewaktuan beban, LCD terlebih dahulu harus diberi inisialisasi. Proses inisialisasi LCD
terdiri dari tiga instruksi yaitu function set, display ON/OFF control dan entry mode set.
Awal proses inisialisasi adalah dengan memberikan logika rendah pada port RS
kode yang akan digunakan. Instruksi ini disebut fuction set yang bertujuan agar LCD
mengetahui batas instruksi yang dikirimkan berikutnya. Perancangan ini menggunakan
panjang kode sebesar sebesar 4 bit dengan cara memberikan kode 03FH pada LCD.
Display ON/OFF control berfungsi untuk mengaktifkan display dan kursor dengan
memberikan kode 00DH pada LCD. Entry mode set berfungsi untuk mengerakkan kursor,
kode 04H untuk geser kiri dan 006H untuk geser kanan.
Untuk menampilkan karakter ke LCD, RS diberi logika tinggi (RS=’1’) dan R/W
diberi logika rendah (R/W=’0’) terlebih dahulu. Flowchart inisialisasi LCD dapat dilihat
pada Gambar 3.16. Setelah proses inisialisasi, LCD dapat digunakan untuk menampilkan
instruksi dari mikrokontroler. Gambar 3.15 adalah flowchart untuk menampilkan instruksi
dan kode pada LCD. Beban pada baris pertama LCD ditampilkan terlebih dahulu setelah
instruksi dan kode ditampilkan. Setelah itu user memilih beban yang akan ditampilkan dan
mengatur waktu beban yang ingin ditampilkan.
START
END KIRIM DATA 03FH
FUNCTION SET
KIRIM DATA 0DH DISPLAY ON/OFF
CONTROL
KIRIM DATA 004H atau 006 H ENTRY SET
MODE
SET PORT RS (RS=1)
CLEAR PORT R/W R/W=0
TAMPILKAN KARAKTER INSTRUKSI dan DATA
A
A
start
end Inisialisasi LCD
Tampilkan beban pada baris pertama LCD
Tampilkan waktu untuk beban 2
Tampilkan waktu untuk beban 3
Kembali ke beban 1 Tampilkan waktu untuk
beban 1
Pilih beban ? Beban 2 ? Beban 3 ?
Pilih beban ? Pilih beban ?
Beban 1 ?
Pilih beban ?
Y
T
T
Y
Y
T
T
Y
Y
T
T
Y
T
Y
BAB IV
HASIL DAN PEMBAHASAN
Bab ini menjelaskan beberapa pengujian dan pengamatan yang telah diambil, beserta
pembahasannya untuk mengetahui kesesuaian alat yang dibuat dengan perancangan.
Pengujian akan meliputi hasil kerja alat secara keseluruhan.
4.1 Hasil Akhir Perancangan
Dari perakitan perangkat keras dan pemrograman perangkat lunak telah dihasilkan
suatu peralatan yang berfungsi untuk mengendalikan ON/OFF lampu menggunakan remote
control televisi, seperti ditunjukkan pada Gambar 4.1. Be
![Gambar 2.1. Lebar pulsa dan lebar jeda pada Pulse-Coded Signal [4]](https://thumb-ap.123doks.com/thumbv2/123dok/1705606.2080557/24.612.10.585.168.691/gambar-lebar-pulsa-lebar-jeda-pulse-coded-signal.webp)
![Gambar 2.2. Lebar pulsa dan lebar jeda pada Space-Coded Signal [4]](https://thumb-ap.123doks.com/thumbv2/123dok/1705606.2080557/25.612.19.592.90.620/gambar-lebar-pulsa-lebar-jeda-space-coded-signal.webp)
![Gambar 2.4. Lebar header dan kode remote control [4]](https://thumb-ap.123doks.com/thumbv2/123dok/1705606.2080557/26.612.24.586.160.697/gambar-lebar-header-dan-kode-remote-control.webp)
![Gambar 2.5. Bentuk sinyal pulse modulation [5]](https://thumb-ap.123doks.com/thumbv2/123dok/1705606.2080557/27.612.18.598.163.685/gambar-bentuk-sinyal-pulse-modulation.webp)
![Tabel 2.2. Contoh kode remote control televisi merek SONY [5]](https://thumb-ap.123doks.com/thumbv2/123dok/1705606.2080557/28.612.23.589.143.687/tabel-contoh-kode-remote-control-televisi-merek-sony.webp)