BAHASA isyarat adalah bahasa yang mengutamakan komunikasi
Teks penuh
Gambar
Dokumen terkait
Upaya yang dilakukan Gerakan untuk Kesejahteraan Kaum Tunarungu (GERKATIN) dan praktisi bahasa isyarat belum memperlihatkan hasil yang maksimal, sehingga diperlukan
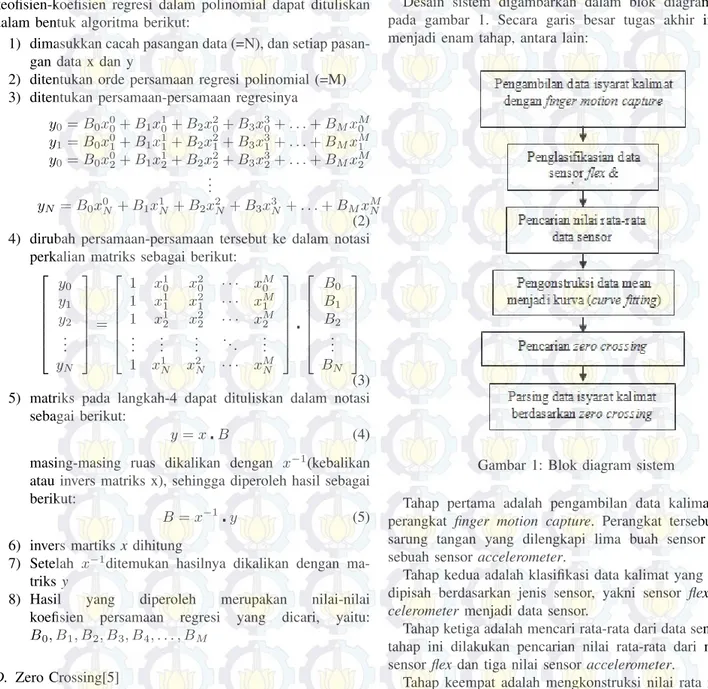
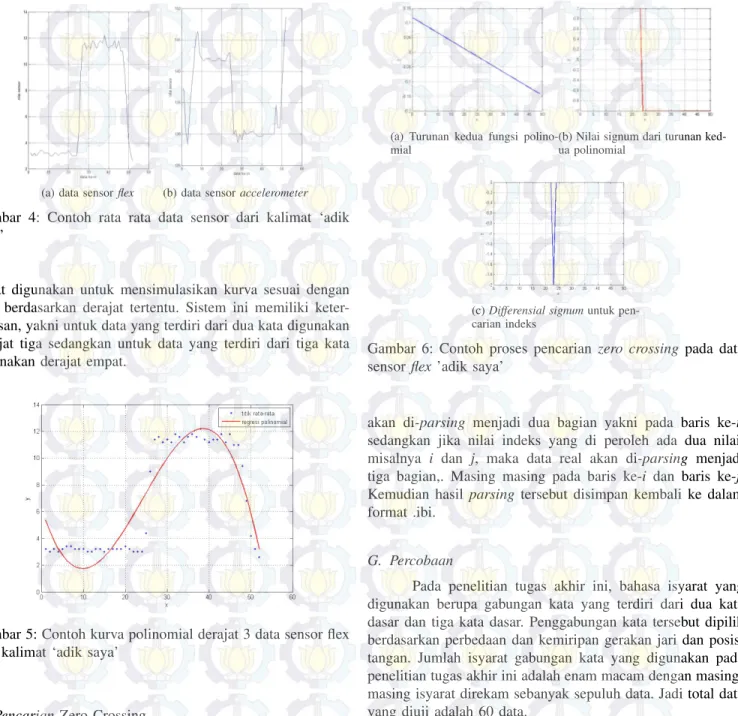
Dalam penelitian ini mencoba untuk mengembangkan sistem pengenalan bahasa isyarat Indonesia berbasis sensor yang diharapkan dapat memperbaiki akurasi, yaitu dengan
Dalam penelitian ini, akan dikembangkan program aplikasi untuk pembelajaran bahasa isyarat dengan menggunakan sensor Kinect untuk mendeteksi gerakan tangan dan kemudian membandingkan
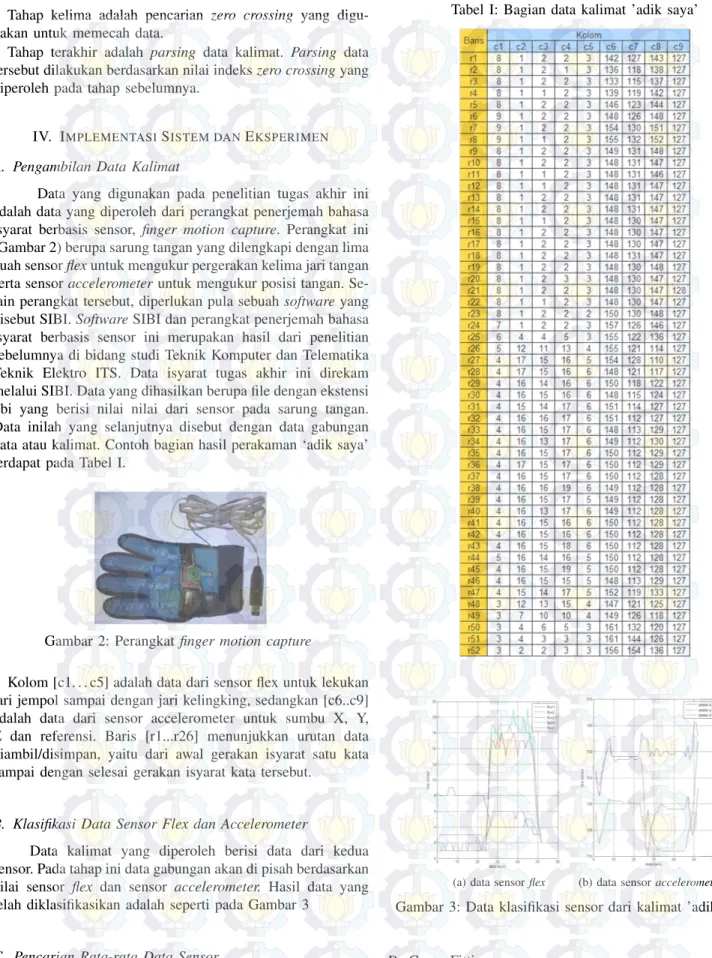
Sarung tangan Sistem Isyarat Bahasa Indonesia untuk kata bergerak [10][11] Dalam penelitian ini dikembangkan sistem pengenalan bahasa isyarat Indonesia berbasis sensor yang
Kemahiran ini memberi penekanan kepada aktiviti menyatakan dan melakukan apa yang diisyaratkan, memperluaskan perbendaharaan kata secara umum, membentuk frasa asas
Kemahiran ini memberi penekanan kepada aktiviti menyatakan dan melakukan apa yang diisyaratkan, memperluaskan perbendaharaan kata secara umum, membentuk frasa asas Bahasa Malaysia
Kemahiran ini memberi penekanan kepada aktiviti menyatakan dan melakukan apa yang diisyaratkan, memperluaskan perbendaharaan kata secara umum, membentuk frasa asas Bahasa
Kurangnya media yang mengedukasi tentang bahasa isyarat tangan di Indonesia menyebabkan minimnya minat masyarakat yang mau mempelajari bahasa isyarat tangan agar dapat
