Pada bab ini akan dibahas mengenai pengujian dan analisa pada hardware yang telah dirancang. Tujuan dari pengujian dan analisa ini adalah untuk mengetahui apakah hardware tersebut telah berfungsi dengan benar dan sesuai rencana atau tidak. Pengujian dan analisa ini dilakukan secara bertahap, diawali dengan pengujian hardware programmer, kemudian dilanjutkan dengan pengujian proyek sederhana
5.1. Analisis Permasalahan
Setelah hardware programmer selesai dirancang, maka sebelum dicoba untuk mendownload program, terlebih dahulu mengukur tegangan I/O pada hardware programmer tersebut. Mengingat tegangan I/O pada hardware programmer ini harus sama dan sesuai dengan tegangan pada schematicnya, maka dari itu diperlukan suatu alat untuk mengukur tegangan tersebut yaitu dengan AVO meter.
5.2. Pengujian Sensor Garis
Sensor garis dalam simulasi mobil automatis sangatlah penting, karena itu rangkaian pertama yang diuji adalah sensor garis ini.
Pengujian sensor garis dilakukan dengan cara meletakkan sensor pada background dengan warna hitam dan putih. Jika ketika diletakkan di atas warna
hitam maka lampu indicator akan mati, dan ketika berada di atas warna putih maka lampu indicator akan tetap menyala
Pengujian 1:
Sensor diletakkan di atas warna hitam:
Gambar 5.1 kondisi lampu indicator ketika sensor berada di atas warna hitam
Pengujian ini berhasil karena lampu indicator mati ketika sensor diletakkan di atas warna hitam
Pengujian 2:
Sensor diletakkan di atas warna putih:
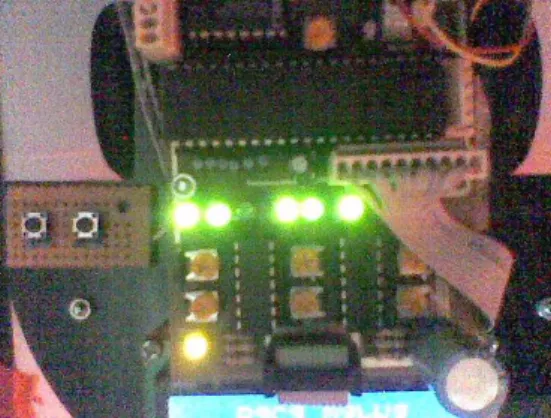
Gambar 5.2 kondisi lampu indicator ketika sensor berada di atas warna putih
Pengujian ini berhasil karena lampu indicator menyala ketika sensor diletakkan di atas warna putih
Dengan pengujian-pengujian di atas diketahui bahwa sensor dapat berjalan dengan baik
5.3. Pengujian Sensor Warna
Pengujian sensor warna dilakukan untuk mengetahui apakah sensor sudah bisa membedakan warna atau belum, untuk dapat mengetahui apakah sensor sudah berjalan dengan baik maka dilakukan pengecekan dengan meletakkan sensor pada tiga kertas yang berbeda.
Pengujian dilakukan dengan dua kondisi berbeda, kondisi pertama pengujian dilakukan di dalam ruangan tertutup, sedangkan kondisi kedua pengujian dilakukan di ruangan terbuka.
Pengujian 3:
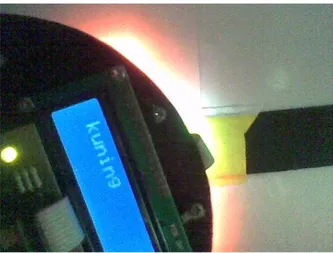
Sensor warna diletakkan di atas kertas berwarna kuning:
Pengujian 4:
Sensor warna diletakkan di atas warna hijau:
Gambar 5.4 sensor warna diletakkan di atas warna hijau
Pengujian 5:
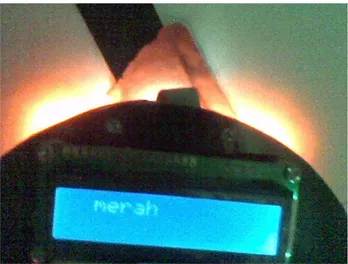
Sensor warna diletakkan di atas warna merah:
Gambar 5.5 sensor warna diletakkan di atas warna merah
Melaului pengujian dengan kondisi ruangan tertutup nilai yang didapat dari sensor warna ini adalah sebagai berikut :
Tabel 5.1 Pembacaan Sensor Warna di dalam ruangan tertutup Pengujian Ke-1 Pengujian Ke-2 Pengujian Ke-3 Pengujian Ke-4 Pengujian Ke-5 Merah 93 97 93 106 98 Kuning 197 196 193 183 192 Hijau 77 79 82 83 83
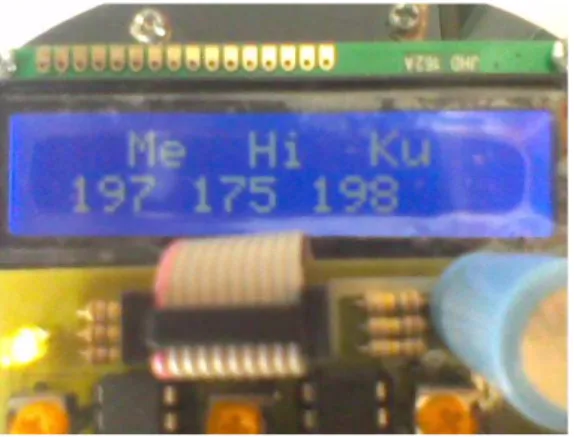
Karena nilai-nilai di atas sudah memiliki perbedaan yang cukup jauh maka sensor warna yang dibuat sudah dapat membedakan warna-warna yang ada. Berikut ini hasil salah satu pembacaan warna:
Gambar 5.6 hasil pembacaan sensor warna pengujian di ruang tertutup
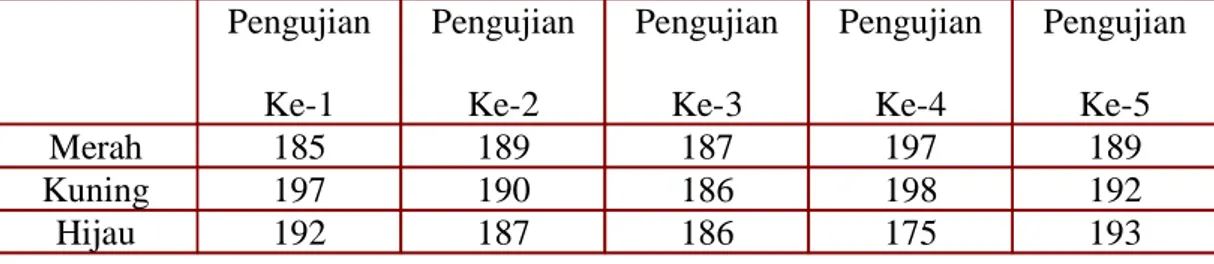
Sedangkan melalui pengujian dengan kondisi ruang terbuka nilai yang didapat dari sensor warna ini adalah sebagai berikut :
Tabel 5.2 Pembacaan Sensor Warna di ruang terbuka Pengujian Ke-1 Pengujian Ke-2 Pengujian Ke-3 Pengujian Ke-4 Pengujian Ke-5 Merah 185 189 187 197 189 Kuning 197 190 186 198 192 Hijau 192 187 186 175 193
Karena nilai-nilai yang didapatkan tidak memiliki perbedaan yang dapay dijadikan acuan maka sensor warna yang dibuat tidak bisa membedakan
warna-warna yang ada dengan tepat jika terlalu banyak cahaya di lingkungan sekitarnya. Berikut salah satu hasil dari pembacaan sensor warna pada ruang terbuka :
Gambar 5.7 hasil pembacaan sensor warna di ruang terbuka
5.4. Studi Kasus
Setelah semua rangkaian berfungsi dengan baik selanjutnya dilakukan pengujian mobil secara keseluruhan untuk memastikan bahwa semua rangkaian terhubung dan dapat berjalan dengan baik.
Pengujian ini dilakukan beberapa tahap, tahap pertama yang dilakukan adalah pengujian sensor garis, kemudian pengujian sensor warna
Kasus I:
Mobil diletakkan di atas garis lurus
Mobil
Gambar 5.8 mobil ditempatkan di atas garis lurus.
Pengujian pertama mobil diletakan di sebelah kiri lintasan, pada detik 1-3 mobil melakukan belok kanan tajam, dan pada detik 4-7 mobil melakukan belok kanan ringan, setelah itu mobil dapat melaju lurus.
Pengujian kedua mobil diletakan di sebelah kanan lintasan, pada detik 1-3 mobil melakukan belok kiri tajam, dan pada detik 4-7 mobil melakukan belok kiri ringan, setelah itu mobil dapat melaju lurus.
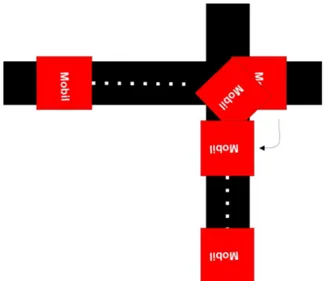
Kasus 2:
Mobil diletakkkan di atas lintasan yang memiliki perempatan
Gambar 5.9 mobil belok kanan ketika menghadapi perempatan
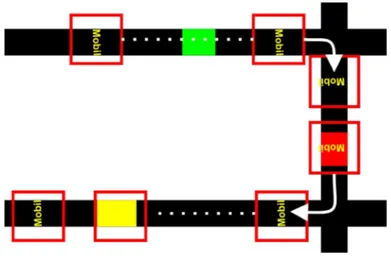
Pengujian ketiga ini meletakkan mobil pada lintasan yang memiliki perempatan. Ketika mobil menghadapi perempatan, aksi motor adalah sebagai berikut:
No. Aksi Motor Keterangan
1 Maju Mobil dimajukan sejenak. 2 Stop Motor berhenti sejenak
3 Belok kanan tajam Motor kanan berhenti, motor kiri maju cepat 4 Belok kanan sedang Motor kanan maju sedikit, motor kiri maju
sedang
5 Maju Motor kanan maju, motor kiri maju
Dari percobaan di atas mobil mampu menghadapi lintasan yang memiliki perempatan. Mobil mampu berbelok kanan tajam ketika menghadapi perempatan, lalu berbelok kanan sedang sehingga memposisikan mobil ke tengah.
Kendala dari pengujian ini, tidak selalu mobil dapat melakukan belok kanan sedang.
Berikut ini hasil dari pengujian I dan III:
(a) (b)
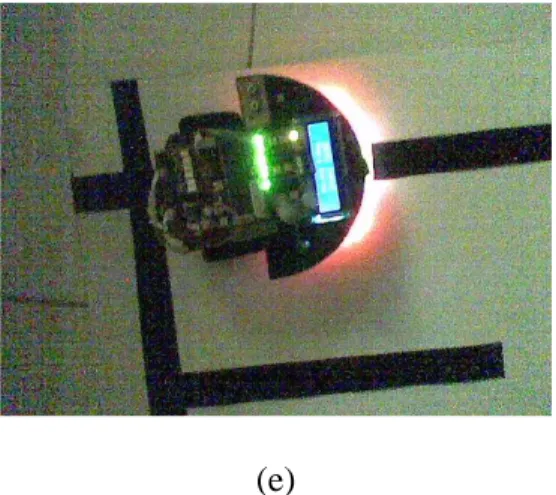
(e)
Gambar 5.10 Posisi Mobil di Pengujian I dan III
Penjelasan :
Gambar (a) adalah posisi awal dimana mobil ditempatkan di sebelah kanan garis
Gambar (b) adalah posisi saat mobil mulai memasuki jalur Gambar (c) adalah posisi saat mobil berhasil berada di lintasan
Gambar (d) adalah posisi ketika mobil menemui perlintasan, dan berhasil belok kanan.
Gambar (e) adalah posisi mobil berhasil melaju lurus sesaat setelah mobil berbelok ke kanan
Berikut ini hasil dari pengujian II dan III:
(a) (b)
(c) (d)
(e) (f) Gambar 5.11 Posisi mobil di Pengujain II dan III
Dari pengujian-pengujian di atas dapat diketahui bahwa mobil sudah dapat berjalan dengan baik di atas lintasan lurus.
Penjelasan :
Gambar (a) adalah posisi awal dimana mobil ditempatkan di sebelah kiri garis
Gambar (b) adalah posisi saat mobil mulai memasuki jalur Gambar (c) adalah posisi saat mobil berhasil berada di lintasan
Gambar (d) adalah posisi ketika mobil menemui perlintasan, kemudian berhenti sejenak.
Gambar (e) adalah posisi mobil mulai berbelok ke kanan
Gambar (f) adalah posisi mobil berhasil melaju kembali setelah berbelok.
Kasus 3 :
Mobil diletakkan di atas garis yang memiliki pertigaan :
Gambar 5.12 Mobil Ditempatkan di Rute Yang Mempunyai Pertigaan
Pengujian keempat ini meletakkan mobil pada lintasan yang memiliki pertigaan. Ketika mobil menghadapi pertigaan, mobil tidak akan menghiraukan pertigaan tersebut sehingga mobil akan tetap melaju
Berikut ini hasil dari pengujian keempat :
(a) (b)
(c) (d) Gambar 5.13 Hasil Pengujian Keempat
Penjelasan :
Gambar (a) : adalah posisi awal mobil
Gambar (b) : mobil mulai melaju di atas jalur lurus
Gambar (c) : /mobil menghadapi pertigaan tapi tidak melakukan apa-apa, sehingga mobil tetap melaju lurus
Gambar (d) : mobil melaju lurus setelah menghadapi pertigaan.
Dari hasil pengujian keempat diketahui bahwa mobil tidak dapat mengenali pertigaan, sehingga mobil tetap melaju lurus.
Kasus 5:
Gambar 5.14 Mobil Ditempatkan di Rute yang Memiliki Tikungan Ke Kanan
Gambar 5.15 Mobil ditempatkan Di Rute Yang Memiliki Tikungan Ke Kiri
Pengujian kelima ini meletakkan mobil pada lintasan yang memiliki tikungan baik tikungan ke kanan maupun tikungan ke kanan. Ketika mobil menghadapi tikungan ke kanan, mobil tidak akan menghiraukan tikungan tersebut sehingga mobil akan tetap melaju.
Aksi yang terjadi saat mobil menghadapi tikungan sama dengan saat mobil menghadapi pertigaan, yaitu mobil tidak menghiraukan tikungan tersebut sehingga mobil tetap melaju lurus.
Kasus 6 :
Mobil ditempatkan pada lintasan yang memiliki perbedaan warna di dalamnya:
Gambar 5.16 mobil ditempatkan di rute yang memiliki perbedaan warna
Pada pengujian ini mobil ditempatkan pada lintasan yang memiliki perbedaan warna, ketika mobil melaju melintasi warna hijau mobil sudah bisa melaju dengan baik. Saat melintasi warna merah mobil dapat berhenti selama 6 detik. Ketika melintasi warna kuning mobil sudah bisa mengurangi kecepatan.
Berikut ini adalah gambar hasil dari pengujian saat mobil melintasi jalur yang terdapat warna merah di dalamnya:
(c)
Gambar 5.17 Hasil Pengujian Saat Mobil Melalui Jalur Berwarna
Penjelasan :
Gambar (a) adalah gambar saat mobil diletakkan di dalam jalur Gambar (b) adalah saat mobil dapat melaju mengikuti jalur yang ada
Gambar (c) adalah gambar saat mobil melintasi permukaan berwarna merah, yang kemudian mobil melakukan aksi berhenti sejenak selama 7 detik kemudian melaju kembali.
Kendala dari pengujian ini adalah ketika mobil melewati warna kuning mobil terkadang mendeteksi sebagai warna putih. Sehingga aksi yang diberikan terkadang tidak tepat.
Berikut ini nilai yang didapat dari pengujian sensor warna di ruang tertutup : Tabel 5.4 Besarnya Tegangan Sensor Warna Saat Melintasi Warna
No Warna
Vp
Ruang Tertutup Ruang Terbuka
1 Putih 3.32 V 3.46 V
2 Hitam 0.58 V 3.03 V
4 Kuning 3.82 V 3.87 V
5 Hijau 1.54 V 3.42 V
Setelah didapatkan tegangan dari sensor warna, tegangan tersebut dikirim ke ADC sehingga didapatkan nilai sebagai berikut :.
Tabel 5.5 Besarnya Tegangan ADC Sensor Warna
No Warna
VADC
Ruang Tertutup Ruang Terbuka
1 Putih 170 mV 177 mV
2 Hitam 30 mV 155 mV
3 Merah 97 mV 197 mV
4 Kuning 196 mV 198 mV
5 Hijau 79 mV 175 mV
Untuk dapat dibaca oleh microcontroller tegangan ADC tersebut diirubah dalam bentuk bit, dan didapatkan data tersebut
Tabel 5.6 Nilai Bit Untuk Masing-Masing Warna
No Warna
Bit
Ruang Tertutup Ruang Terbuka
1 Putih 10101010 10110001 2 Hitam 00011110 10011011 3 Merah 01100001 11000101 4 Kuning 11000100 11000110 5 Hijau 01001111 10101111 Kasus 7 :
Mobil ditempatkan di atas lintasan, dengan kondisi seperti gambar di bawah ini :
Gambar 5.18 Mobil Ditempatkan di Rute yang Memiliki garis Finish
Pada pengujian ini mobil ditempatkan pada lintasan yang memiliki garis finish, kondisi finish terpenuhi jika hanya sensor garis kiri terluar dan kanan terluar yang aktif, sedangkan yang lain tidak.
Berikut ini hasil dari pengujian saat mobil melaju di lintasan dan melintasi garis finsih
(c)
Gambar 5.19 Posisi Mobil Saat Melintasi Rute yang Memiliki Finish
Penjelasan :
Gambar (a) : posisi mobil saat mulai start Gambar (b) : mobil mulai melaju melintasi rute Gambar (c) : mobil berhenti saat melintasi garis finish
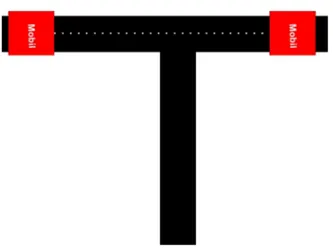
Garis finish pada rute adalah rute yang berbentuk seperti di bawah ini:
Gambar 5.20 Bentuk Garis Finish
Dengan bentuk rute di atas, dapat dikatakan bahwa mobil akan berhenti jika hanya sensor garis kiri terluar dan kanan terluar yang aktif sedangkan yang lain tidak aktif, berikut ini kondisi mobil saat melintasi rute di atas :
Gambar 5.21 Kondisi Mobil Saat melintasi Finish