8
KONTROL PID PENGATURAN TEMPERATUR INKUBATOR SEBAGAI SARANA BELAJAR KONTROLER PID DIGITAL
Arif Johar Taufiq 11
1 Prodi Teknik Elektro, Fakultas Teknik, Universitas Muhammadiyah Purwokerto Jl. Raya Dukuwaluh PO BOX 202, Purwokerto, Jateng
*Email: arifjt@ump.ac.id atau arifjt@gmail.com
Abstrak
Telah dilakukan implementasi kontrol PID untuk pengontrolan temperatur inkubator menggunakan board Arduino Uno. Hal ini dilakukan untuk mempermudah bagi mahasiswa tingkat awal teknik elektro mempelajari kontrol PID digital melalui praktek implementasi kontrol PID. Mula-mula dilakukan identifikasi plant inkubator untuk melihat watak tanggapan plant kemudian dilakukan pemilihan parameter PID dan penerjemahan rumus matematis kontrol PID digital ke bahasa pemrogram C Arduino. Unjuk kerja pengontrolan diamati secara online melalui tampilan grafik dan data text port serial komputer. Berdasarkan tampilan grafik tanggapan real time dan data text mahasiswa dapat melihat cara kerja kontrol PID pada pengontrolan plant inkubator.
Kata kunci: Arduino Uno, PID Digital, Inkubator, parameter PID
1. PENDAHULUAN
Pengendalian PID sampai saat ini masih banyak digunakan di dunia industri pengontrolan proses: industri kimia, pulp, makanan minyak dan gas bahkan mendominasi hampir 97% (Setiawan, 2002). Kelebihan kontrol PID yaitu: sederhana, pemakaian yang luas dan cukup handal (Cominus dan Munro, 2002). Teori tentang sistem kontrol PID secara umum diajarkan di semester 4-6 perkuliahan. Penjelasan teori yang abstrak kurang dapat dipahami dengan mudah, untuk itu diperlukan implementasi nyata pendamping teori dalam bentuk praktek yang dapat dicoba oleh mahasiswa sendiri. Pemahaman mahasiswa akan sangat terbantu jika terdapat contoh sistem kendali PID. Penjelasan teori sistem kontrol akan langsung dinyatakan dalam wujud nyata alat yang dapat dipraktekkan dan dapat dilihat tanggapanya secara waktu nyata. Dalam penelitian ini dilakukan implementasi pengendalian temperatur ruang dalam inkubator dengan kendali PID yang dapat dicoba pemilihan parameter dan dilihat tangggapannya sehingga mahasiswa mengetahui cara kerja kendali PID.
2. METODOLOGI
Metodologi yang dilakukan dalam penelitian ini adalah: studi literatur, perancangan perangkat keras, perancangan perangkat lunak dan pengujian. Berdasarkan Ogata (2010) sistem yang berkaitan dengan temperatur maka sistem plant dapat dimodelkan dalam bentuk sistem orde 1 seperti hanya rangkaian Resistor dan Capacitor. Model rumusan plant inkubator yang terbentuk diuji simulasi untuk mendapatkan grafik tanggapan sistem untuk mengetahui watak sistem plant tersebut.
2.1 Sistem Plant dan Bagian Kontrol
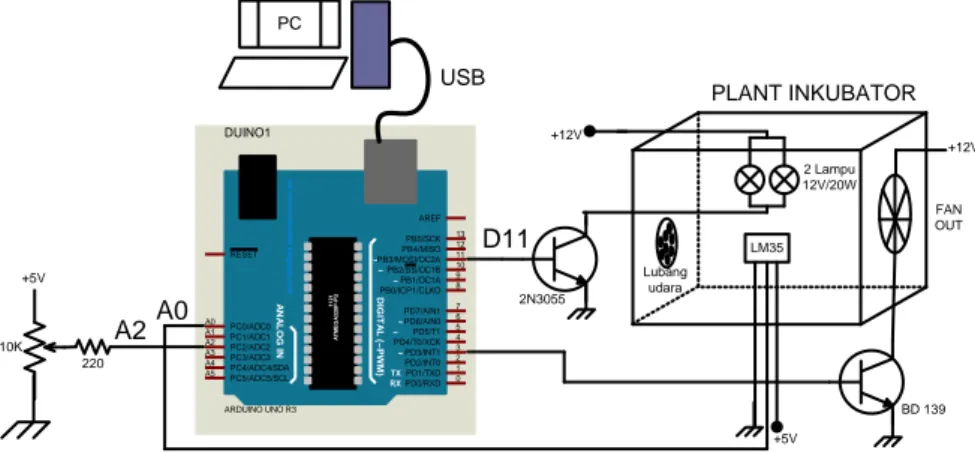
Sistem plant yang digunakan adalah model inkubator mini dengan dengan ukuran (13 cm x 21 cm x 13 cm), untuk pemanas digunakan Lampu 12V/18W dua buah, serta sistem pendingin berupa kipas CPU ukuran 8 cm yang berfungsi membuang udara panas didalam inkubator.
Tahapan awal penelitian dilakukan adalah identifikasi plant dengan cara melakukan perekaman tanggapan lup terbuka sistem dengan cara menyalakan pemanas (Lampu) 100% dan mencatat kenaikan suhu di dalam inkubator. Model plant dirumuskan sebagai sistem orde 1 sbb:
9 D IG IT A L (~ P W M ) A N A L O G IN ATMEGA328 P-P U 11 21 ~ ~ ~ ~ ~ ~ m ic ro c o n tro la n d o s .b lo g s p o t.co m TX RXPD0/RXD 0 PD1/TXD 1 PD2/INT0 2 PD3/INT1 3 PD4/T0/XCKPD5/T1 4 5 PD6/AIN0 6 PD7/AIN1 7 PB0/ICP1/CLKOPB1/OC1A 8 9 PB2/SS/OC1B 10 PB3/MOSI/OC2A 11 PB4/MISO 12 PB5/SCK 13 AREF PC5/ADC5/SCL A5 PC4/ADC4/SDA A4 PC3/ADC3 A3 PC2/ADC2 A2 PC1/ADC1 A1 PC0/ADC0 A0 RESET DUINO1 ARDUINO UNO R3 LM35 10K +5V 2N3055 +12V PC 2 Lampu 12V/20W PLANT INKUBATOR A0 A2 D11 220 USB BD 139 +12V FAN OUT Lubang udara +5V
Gambar 1. Plant Inkubator dan Sistem Kontrol 2.2 Kendali PID
Dalam Ogata (2010) kendali PID dirumuskan sbb:
(sumber: Ogata, 2010) Gambar 2. Kendali PID
Plant dalam hal ini adalah inkubator dikendalikan dengan kendali PID sehingga sinyal error
selisih antara acuan dan luaran yang diproses secara proporsional, integral dan diferensial untuk menentukan sinyal kontrol yang akan diberikan ke plant kembali. Karena sistem diproses dengan komputer/mikrokontroler maka diperlukan ADC dan ADC untuk menjembatani sinyal analog ke sinyal digital dan sebaliknya.
(sumber: Ibrahim, 2006) Gambar 3. Kendali Digital
Rumus Kendali PID Digital Proporsional UP(z) = KP E(z) (2) Integral
E(z) 1 z 2 1) T(z K (z) U I I (3) Diferensial E(z) Tz 1 -z K (z) UD D (4)10 2.3 Board Arduino Uno
Board Arduino Uno adalah sistem berbasis mikrokontroler ATMega328 yang sudah diisi
bootloader untuk memudahkan pengisian program dan menjalankankan program sebagai eksperiman dalam sistem minimim mikrokontroler. Board Arduino Uno juga dilengkapi dengan komunikasi serial sehingga dapat dilakukan pengamatan, penyimpana data ke komputer. Mikrokontroler dalam Board Arduino difungsikan sebagai pengontrol sistem yang telah diisi dengan dengan algoritma kendali PID.
Kemasan IC ATMega328 didalamnya sudah tersedia dan mencakup untuk masukan, luaran digital dan analog (ADC, DAC/PWM), juga pewaktu. Sehingga lebih praktis untuk digunakan dalam bereksperimen berbagai program pengendalian ataupun aplikasi lainnya.
Potongan program algoritma kendali PID ditulis dalam program arduino sbb:
E=Set-AktualTemp; //error
E_d = E - E_1; //error diferensial E_i = E + E_1; //error integral UProp = KP*E; //out P
UDif= (KD/Ts) * (E_d); //out D UInt = UInt_1 + KI*Ts/2*(E_i); //out I UPID=(UProp + UDif + UInt); //out PID
Notasi E adalah Error, KD merupakan parameter diferensial, KI merupakan parameter integral. Hasil perhitungan PID atau variabel UPID berupa nilai yang kemudian di skala sesuai luaran PWM Arduino yaitu antara 0-255. Jika nilai perhitungan PID positif 0 s/d 255 digunakan untuk menyalakan lampu tingkat panas sesuai dengan nilai PID tersebut. Dan jika nilai variable UPID bernilai negatif juga di skala dalam range 0 s/d -255 untuk semakin kencang memutar kipas untuk membuang udara panas dalam inkubator.
Bagian penting lain dari Arduino adalah analog masukan A0 dan A2 yang difungsikan sebagai masukan sinyal analog yang berasal dari sensor suhu LM 35 dan masukan A2 yang berupa masukan dari tegangan untuk referensi suhu yang diinginkan dalam pengendalian. Sedangkan luaran analog menggunakan port digital dengan fasilitas PWM (Pulse Width Modulation) pada luaran port digital 11 dan 3.
3. HASIL DAN PEMBAHASAN
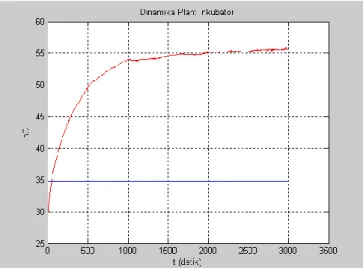
Untuk mendapatkan rumusan model plant, sistem disusun seperti pada Gambar 1. Alat yang difungsikan adalah sensor suhu LM53, pemanas Lampu dan mikrokontroler sebagi pengendali dan konfigurasinya adalah lup terbuka. Mikokontroler diprogram untuk menyalakan lampu nyala 100% dan mencatat kenaikan suhu tiap detik melalui sensor suhu LM35, hasil grafik yang didapat sbb:
11
Berdasarkan data grafik didapat konstanta K yang merupakan nilai suhu maksimal yaitu = 55oC dan tetapan waktu , yaitu waktu yang diperlukan untuk mencapai temperatur 63,2% dari suhu maksimal, yaitu tercatat dinilai 49,6 detik. Sehingga rumasan plant adalah sbb:
𝐺(𝑝) = 55 49,6 𝑆 + 1
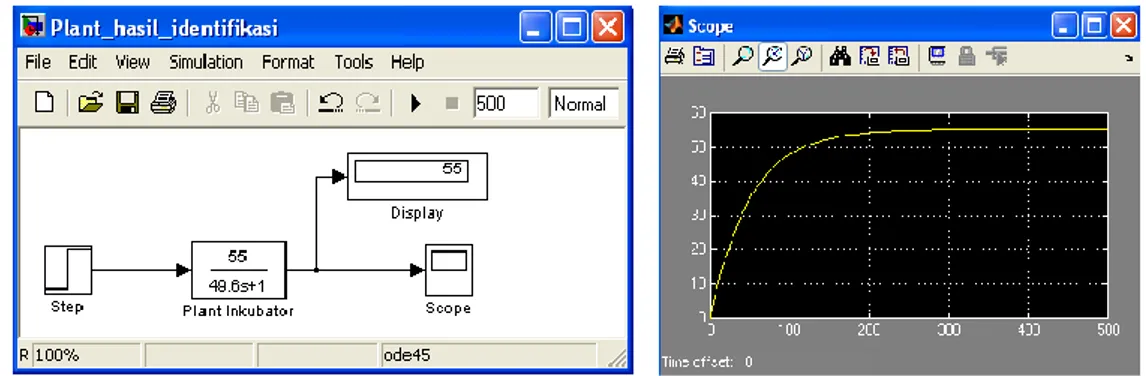
Pengujian model plant yang telah didapat dengan program Matlab menghasilkan tampilan yang sama dengan data percobaan, berarti rumusan model plant dapat dipakai untuk acuan analisis pengendalian nantinya. Hasil simulasi pengujian rumusan model plant dengan program Matlab didapat grafik yang sama dengan hasil perekaman data uji tanggapan lup terbuka terlihat pada Gambar 5.
Gambar 5. Simulasi model dan grafik tanggapan
3.1. Percobaan Kendali Jenis P
Untuk kendali jenis Proporsional maka disetting parameter D=0, I=0 dan parameter P diisikan dengan nilai penguatan proporsional yang diinginkan. Misalkan diisi dengan P= 100 didapat hasil seperti pada Gambar 6 sesuai dengan teori bahwa kendali jenis P masih menyisakan kesalahan keadaan tunak, data percobaan temperatur yang diinginkan 33oC dari nilai suhu awal 29oC naik mendekati ke suhu 32,5oC masih menyisakan kesalahan keadaan tunak rata-rata sebesar 0,7.
Gambar 6. Tanggapan kendali jenis P dengan P=100 3.2. Percobaan Kendali Jenis PD
Pada percobaan kendali jenis PD untuk P=30 dan D=5 menghasilkan tanggapan pada Gambar 7. Pengamatan selama 441 detik sistem tidak dapat menuju luaran yang diinginkan, kesalahan sangat besar dengan IAE (Integral Absolute Error) =2140,8 dan rata rata kesalahan 4,8.
0 20 40 60 80 100 120 29 29.5 30 30.5 31 31.5 32 32.5 33 Tanggalan kendali P,(100) S u h u ( d e ra ja t) Waktu (detik)
12
Gambar 7. Tanggapan kendali jenis PD (P=30;D=5) 3.3. Percobaan Kendali Jenis PI
Parameter kendali disetting ke nilai P=30; I=0,01 dan D=0 untuk membentuk kendali jenis PI didapatkan hasil tanggapan kendali untuk pengamatan selama 15 menit seperti pada Gambar 8 dengan waktu Response time 164 detik cukup lama dibandingkan dengan kendali jenis PID dengan IAE 2357 dengan rerata kesalahan 3,02.
Gambar 8. Tanggapan kendali jenis PD (P=30;D=5) 3.4. Percobaan Kendali Jenis PID
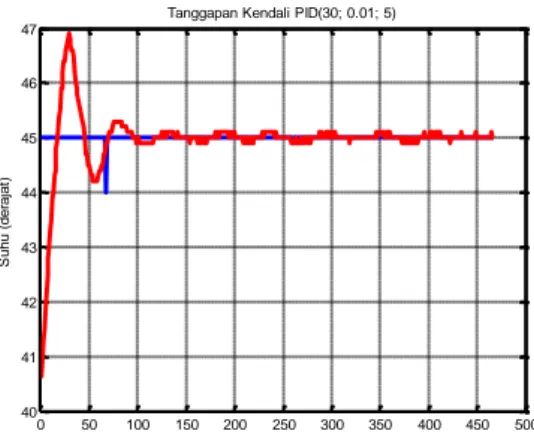
Percobaan kendali jenis PID parameter kita isikan secara lengkap, dengan metode penalaan parameter PID secara try and error didapat parameter terbaik yaitu: P=30, I=0,01 dan D=5. Hasil tanggapan kendali jenis PID disajikan dalam Gambar 9. Pengamatan selam 467 detik didapat hasil:
time response 17,5 detik kesalahan rata-rata 0,2 dengan IEA = 94,4 cukup bagus dibandingkankan dengan jenis kendali P, PD maupun PI.
Gambar 9 Tanggapan kendali jenis PID (P=30, I=0,01, D=5)
Berdasarkan hasil percobaan mahasiswa dapat belajar sifat kendali PID melalui tanggan luaran sistem kendali inkubator dengan berbagai kombinasi jenis kendali dan efek pemilihan parameter PID.
0 50 100 150 200 250 300 350 400 450 26 28 30 32 34 36 38 40 42 44 46 Tanggapan Kendali PD(30; 5) t(detik) S u h u ( d e ra ja t) 0 100 200 300 400 500 600 700 800 25 30 35 40 45 50 55
Tanggapan Kendali PI(30; 0,01)
t(detik) S u h u ( d e ra ja t) 0 50 100 150 200 250 300 350 400 450 500 40 41 42 43 44 45 46 47
Tanggapan Kendali PID(30; 0.01; 5)
t(detik) S u h u ( d e ra ja t)
13
Kendali P mempunyai sifat menyisakan kesalahan keadaan tunak, kesalahan ini dapat diperkecil dengan menaikkan gain parameter P. Sifat kendali PD hampir sama dengan kendali jenis P. Kendali jenis PI mempunyai sifat hampir sama dengan kendali jenis PID dengan tanggapan awal agak lambat, over shot yang berlebihan. Tetapi seiring berjalannya waktu luaran mendekati target yang diinginkan. Kendali jenis PID menggabungkan kelebihan masing masing unsur PID tetapi diperlukan usaha penalaan yang tepat untuk menghasilkan tanggapan yang bagus. Beberapa metode yang dapat dicoba antara lain metode penalaan Ziegler-Nichols, Cohen Coon, dsb. Hasil percobaan kendali PID dengan nilai parameter yang ada menghasilkan unjuk kerja yang paling bagus dari kendali lainnya. 4. DAFTAR PUSTAKA
Hitu Bansal, Lini Mathew2, Ashish Gupta., 2015., Controlling of Temperature and Humidity foran Infant Incubator Using Microcontroller., International Journal of Advanced Research in
Electrical,Electronics and Instrumentation Engineering, Vol. 4, Issue 6, June 2015. Ibrahim, Dogan., 2006, Microcontroller Based Applied Digital Control, John & Wiley Sons, England
Ogata, K., 2010, Modern Control Engineering Fifth Edition, Pearson Education Inc, Prentice Hal,l New Jersey