STUDI LITERATUR
2.1
Estimasi Waktu Perjalanan Bus
Tantangan dalam pelayananBus Rapid Transit(BRT) di daerah perkotaan yaitu
in-frastruktur yang masih berbagi dengan pengguna jalan lain. Meskipun di beberapa titik telah memiliki jalur khusus, namun melakukan estimasi waktu di daerah perko-taan cukup sulit dilakukan terlebih banyak faktor yang mempengaruhi keadaan lalu lintas dalam operasi layanan BRT. Berdasarkan permasalahan tersebut, banyak peneliti melakukan pendekatan untuk memecahkan masalah dalam melakukan esti-masi waktu perjalanan.
Penelitian yang dilakukan oleh Cathey & Dailey (2003) menggunakan kompo-nen tracker atau probe dari Automatic Vehicle Location (AVL) untuk melakukan
prediksi waktu perjalanan bus. Penggunaan AVL untuk mendapatkan lokasi, waktu dan jadwal. Dalam melakukan estimasi waktu perjalanan, sebuah kerangka kerja untuk melakukan monitoring bus secarareal-timedengan menggunakan AVL juga
pernah dilakukan oleh Pu et al. (2009) dan Yoo et al. (2005). Pu et al. (2009) men-jelaskan dalam melakukan estimasi waktu perjalanan data dari AVL menghasilkan data secara real-time dan memiliki nilai yang bermanfaat. Hal ini didukung oleh
Yoo et al. (2005) bahwa data AVL yang berbasis GPS mempunyai nilai efektif yang tinggi dan bertujuan untuk melakukan estimasi waktu perjalanan. Data dari AVL
berbasis GPS memiliki nilai yang berharga dan bermanfaat dapat digunakan untuk melakukan penghitungan estimasi waktu perjalanan yang akurat secara real-time
(Biagioni et al., 2011). Dalam beberapa tahun terakhir, banyak studi yang dilakukan untuk membuat estimasi waktu perjalanan yang lebih akurat pada daerah perkotaan. Berbagai metode diajukan mulai darihistorical based model, regression linear,
time-series model, filter algorithm, knowledge based, artifical neural network,
pat-tern recognition. Stathopoulos & Karlaftis (2003) dan Pu et al. (2009) melakukan
estimasi waktu perjalanan dengan menggunakan relasi antara kecepatan dan waktu pada segment dengan menggunakan multivariate time series model. Stathopoulos
& Karlaftis (2003) menggunakan teknik Autoregressive integrated moving
aver-age (ARIMA) sedangkan Pu et al. (2009) menggunakan teknik Bayesian dalam
melakukan pengkinian data dari kombinasi data kecepatan historis dan kecepatan aktual mobil yang digunakan untuk melakukan estmasi waktu perjalanan layanan bus.
Teknik filter juga digunakan oleh Cathey & Dailey (2003) dalam melakukan es-timasi waktu, namum teknik ini membutuhkan informasi kecepatan sebelumnya / historis dan kecepatan aktual pada saat sekarang (current state) untuk menentukan
dan meningkatkan akurasi dari estimasi. Penggunaan teknik algoritma yang lebih rumit dengan menggunakanKnowledge Basedmempunyai hasil yang menjanjikan
untuk estimasi waktu perjalanan. Menurut Lee et al. (2009) pengunaanknowledge
his-toris dan arus lalu lintas saat ini. Sebagai sistem pembelajaran yang ditentukan (supervised learning system), tentunyaneural network membutuhkan data training
sebelum dapat menghasilkan estimasi waktu.
Pendekatan dengan menggunakan time-series model dilakukan oleh Pu et al.
(2009), Sun et al. (2007) dan Yoo et al. (2005). Sun et al. (2007) mengajukan kom-binasi antara kecepatan historis dan kecepatan aktual menghasilkan estimasi waktu lebih akurat. Teknik penghitungan data denganlinear regressiondigunakan
semen-tara Pu et al. (2009) mengusulkan metode Bayes dalam melakukan penghitungan kecepatan sedangkan Yoo et al. (2005) menggunakan teknik linear dari kecepatan rata-rata padalink segmentjalan untuk melakukan estimasi waktu. (Biagioni et al.,
2011) melakukan ekstrasi dari hasil GPS dan jadwal bus untuk dapat melakukan estimasi waktu perjalanan bus. Hal yang sama dilakukan oleh Jimenez-Meza et al. (2013) dengan menggunakan hasil ekstrasi data GPS berupa jarak, kecepatan dan
level of service(LOS) jalan. Dari kedua studi diatas menggunakan data GPS
kemu-dian melakukan ekstrasi untuk memperoleh informasi yang dapat digunakan untuk mengestimasi waktu perjalanan/kedatangan yang akurat.
2.2
Intelligent Transportation Systems (ITS)
Sentralisasi kontrol sistem dapat membantu dalam menjalankan BRT secara lan-car dan efisien. Sistem manajemen dan sentralisasi dapat memberikan keuntungan
dalam melakukan respon yang cepat terhadap perubahan permintaan dari penumpang, efisiensi dalam menjaga jarak bus, mencegah terjadinya tumpukan bus pada suatu halte, dan sistem performa evaluasi (Wright & Hook, 2007).
Teknologi memiliki peranan yang penting dalam area transportasi publik. ITS seperti AVL, memberikanreal-time informasi sistem dapat membantu operasi dan
efisien dalam menjalankan BRT melayani penumpang. Salah satu point
Intelli-gent Transportation System(ITS) adalah meningkatkan kualitas pelayanan terhadap
penumpang dengan memberikan layanan informasi kepada penumpang. Salah satu kontrol sistem yaitu menggunakanAutomated Vehicle Location(AVL) dengan
menga-mati bus sepanjang jalur koridor. Sistem kontrol terpusat menggunakan AVL se-hinga dapat mengatur pergerakan bus agar persebaran bus dapat diamati (Cachulo et al., 2012).
Pada ITS menurut Chen et al. (1999) terdapat 32 layanan pengguna (user
ser-vice) yang dijadikan standar yang dibagi kedalam lima kelompok yaitu Advanced
Traffic Management Systems (ATMS), Advanced Traveller Information Systems (ATIS), Advanced Vehicle Control Systems (AVCS), Advanced Public Transpora-tion Systems (APTS) dan Commercial Vehicle OperaTranspora-tions (CVO). Pada penelitian ini peneliti berfokus kepada ATIS sebagai sumber informasi bagi penumpang dalam merancang perjalanan.
2.3
Advanced Traveller Information System (ATIS)
Dalam ATIS sendiri terdapat lima komponen parameter, salah satu diantaranya informasi mengenai sebelum melakukan perjalanan (pre-trip information).
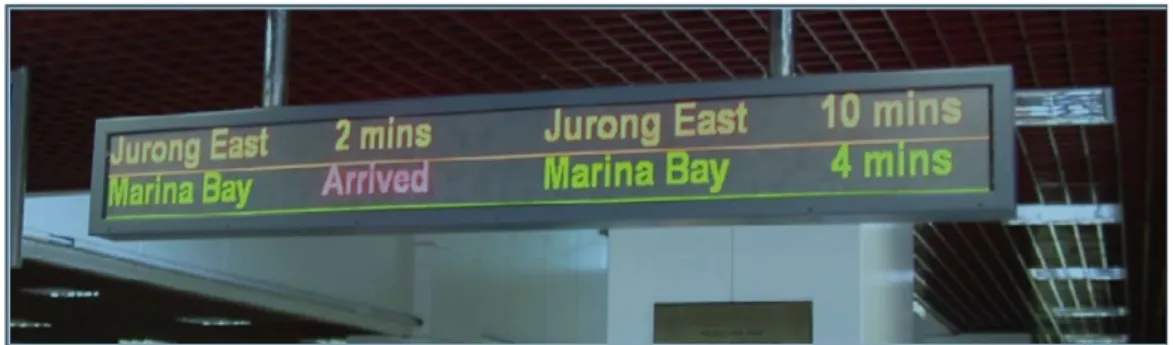
Kon-sep dari ATIS adalah memberikan informasi berguna dan seluas-luasnya kepada pengguna mengenai kondisi lalu lintas. Hal ini berguna untuk mempersiapkan waktu, rute dan tipe transportasi yang akan digunakan. Sistem ini membantu un-tuk meningkatkan efisien pada moda transportasi. Sistem manajemen monitoring dapat diolah untuk menunjukan estimasi waktu tempuh perjalanan sebuah bus dari setiap halte. Hal ini dapat membantu penumpang dalam memperkiraan waktu per-jalanan pada saat menggunakan transportasi umum khususnya bus. Informasi yang diberikan berupa waktu estimasi bus datang pada halte tersebut dan estimasi per-jalanan sampai halte tujuan. Hal ini bermanfaat bagi penumpang mengurangi waktu tunggu yang tidak tahu waktu kedatangannya seperti contoh Variable Message Signs (VMS) pada gambar 2.1
Gambar 2.1: Contoh informasi waktu perjalanan bagi penumpang (Wright & Hook, 2007)
2.4
Automatic Vehicle Location (AVL)
Dalam proses monitoring suatu BRT membutuhkan informasi lokasi dari bus yang sedang beroperasi. Hal ini bertujuan untuk melakukan kontrol dan sistem monitor-ing yang terpadu untuk menjalankan BRT. AVL melakukan penentuan posisi atau lokasi dari suatu obyek kendaraan dan mengirimkan informasi ke suatu server. Data yang didapat dari alat AVL dikirim melalui jaringan dan disimpan didalam database. Dalam beberapa penelitian teknologi GPS sebagai salah satu metode lokasi sistem yang paling banyak digunakan. Keuntungan penggunaan GPS pada AVL dapat memberikan informasi yang cukup akurat dengan menggunakan teknologi satelit atau jaringan telekomunikasi (Mintsis et al., 2004). Kerugian dari penggunaan GPS adalah kemungkinkan gangguan sinyal jika transmisi dihalangi oleh bangunan be-ton yang tinggi dan transmitter berada dibawah jalan layang sehingga menghalangi sinyal.
Teknologi GPS menghasilkan layanan berupa Location Based Service (LBS) menggunakan Geographic Information System (GIS) untuk melakukan kontrol dan pengawasan terdahap suatu obyek. Kegunaan dari LBS bersamaan dengan AVL dapat mengetahui letak dari suatu bus sehingga dapat memprediksi waktu tiba pada halte terdekat (Cathey & Dailey, 2003). Studi mengenai simulasi korelasi hubungan antara dua buah kendaraan dalam mengemudi di jalan juga dilakukan oleh Gunawan (2012). Informasi-informasi yang dikirimkan tidak hanya berupa lokasi melainkan
kecepatan, jarak yang ditempuh sehingga dapat disimulasikan kondisi lalu lintas yang dilewati oleh bus tersebut. Hal ini terjadi karena kondisi jalur bus yang pada beberapa titik masih menggunakan sharing dengan jalur jalan untuk umum.
2.5
Global Positioning Systems (GPS)
GPS pada mulanya bernama NAVSTAR GPS (Navigation Satellite Timing and Ranging Global Position System) yang dikelola oleh NAVSTAR GPS Joint Program pada angkatan udara Amerika Serikat. Awalnya GPS digunakan untuk kepentingan militer, namun saat ini hampir 90% pengguna adalah masyarakat umum.
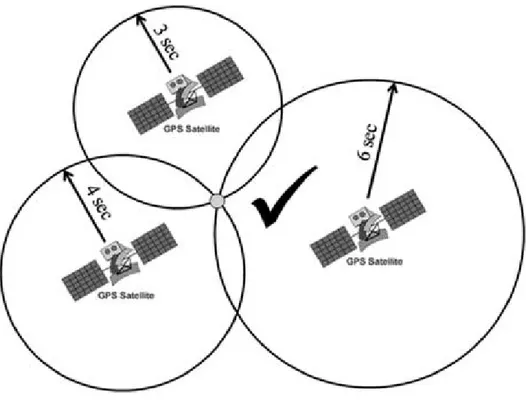
GPS terdiri dari tiga komponen yaituspace segment(satellite),control segment
(infrastruktur danmonitoring) danuser segment(pengguna sinyal GPS). Pada
gam-bar 2.2, hasil dari GPS adalah koordinat sistem yaitu berupa lintang (latitude),
bu-jur (longitude) dan ketinggian (altitude). Meskipun pada pengaplikasian ketinggian
jarang digunakan kecuali untuk presisi yang lebih tinggi. Koordinat sistem saat ini menggunakan World Geodetic System 1984 (WGS-84). Latitude atau lintang adalah garis horizontal yang membagi bumi menjadi 2 bagian utara dan selatan. Garis tengah berupa garis ekuator yang memiliki panjang sekitar 110.57 km dan akan semakin mengecil mendekati kutub. Longitude atau bujur adalah garis yang membagi bumi secara vertikal membuat bagian barat dan timur, dibatasi oleh garis meridian Greenwhich.
Gambar 2.2: Teknologi GPS dalam melakukan posisi (Ogaja, 2011)
2.6
Bus Rapid Transit (BRT)
Bus Rapid Transit (BRT) adalah mode transportasi berupa bus yang memiliki kuali-tas yang baik bercirikan kendaraan yang nyaman, bergerak dengan cepat dan berbiaya efektif untuk perjalanan masyarakat perkotaan dengan jalur khusus serta memiliki layanan yang terjadwal dan pelayanan yang baik bagi penggunanya. Pada imple-mentasi terdapat lima karakteristik yang dijadikan acuan untuk penerapan BRT sis-tem yang baik, yaitu infrastruktur, operasional, bisnis dan organisasi, teknologi dan marketing dan layanan pelanggan. (Wright & Hook, 2007)
rendah, rendahnya polusi suara, biaya tiket yang dinamis, sinyal prioritas pada persimpangan jalan dan penerapan sistem manajemen melalui sentralisasi kontrol menggunakan aplikasi dariIntelligent Transporation System(ITS) seperti AVL dan
ATIS. Dengan salah satu pengaplikasian AVL dengan menggunakan GPS sistem seperti yang ada pada gambar 2.3. Dalam BRT, waktu perjalanan dan kecepatan
Gambar 2.3: Teknologi GPS menggunakan biaya yang efektif untuk melakukan tracking (Wright & Hook, 2007)
commercial saling berhubungan satu sama lain. Commercial speed lebih
pent-ing dibandpent-ingkan dengan kecepatan maksimum bus. Kecepatan commercial BRT
kepada jumlah persimpangan yang dilewati, teknologi yang digunakan dan jarak antar halte.
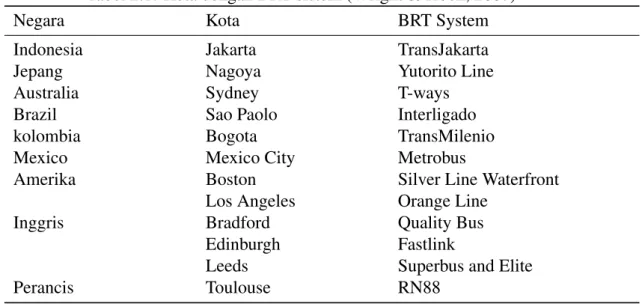
Beberapa implementasi BRT yang ada pada sistem transportasi di dunia dapat dilihat pada tabel 2.1 dan salah satunya adalah sistem BRT TransJakarta.
Tabel 2.1: Kota dengan BRT sistem (Wright & Hook, 2007)
Negara Kota BRT System
Indonesia Jakarta TransJakarta Jepang Nagoya Yutorito Line Australia Sydney T-ways Brazil Sao Paolo Interligado kolombia Bogota TransMilenio Mexico Mexico City Metrobus
Amerika Boston Silver Line Waterfront Los Angeles Orange Line
Inggris Bradford Quality Bus Edinburgh Fastlink
Leeds Superbus and Elite Perancis Toulouse RN88
2.7
Arsitektur Website Tiga Layer
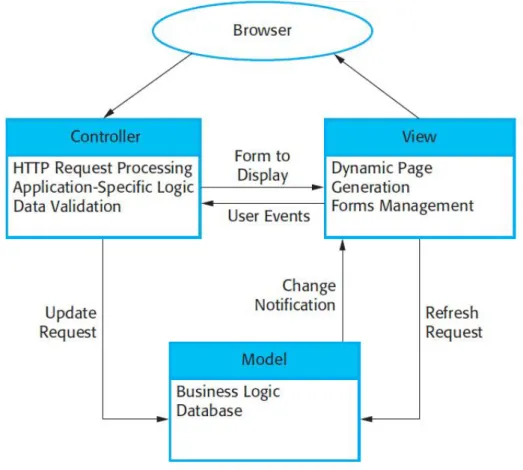
Dalam rekayasa piranti lunak, arsitektur web berbasis client-server architecture
yang terdiri dari presentasi, pengolahan aplikasi dan manajemen data yang secara fisik terpisah. Secara fungsional sistem melayani user dari berbagai server. Ke-untungannya adalah layanan dapat digunakan pada jaringan yang tersebar secara luas dan secara spesifik hanya melayani sesuai dengan kebutuhan pengguna. Pada arsitektur client-server terdapat tiga bagian yaitu server, yang bertugas melayani
permintaan dari user, client yang meminta layanan dan jarigan sebagai media untuk mengakses layanan yang ada. Hubungan secara logika dengan pola pengemban-gan MVC dimana manajemen data pada model, proses aplikasi pada control dan presentasi pada view/web browser yang terlihat pada gambar 2.4.