ELECTRIC TWO WHEELED VEHICLE
KAJIAN PERHITUNGAN STATIKA – KINEMATIKA
DAN PEMBUATAN PROTOTYPE
PROYEK AKHIR
Diajukan sebagai salah satu syarat
untuk memperoleh gelar
Ahli Madya
Disusun Oleh : PUJI SUYUDI NIM : I 8109037
PROGRAM DIPLOMA TIGA TEKNIK MESIN PRODUKSI
FAKULTAS TEKNIK UNIVERSITAS SEBELAS MARET
SURAKARTA
MOTTO DAN PERSEMBAHAN
MOTTO
1. Janganlah kamu pikirkan kata – kata penusuk hati yang mengalir karena
sedikit kesalahan didalam langkahmu, tetapi pikirkanlah apa yang harus
kamu perbuat untuk menutupi dan memberbaiki langkahmu itu.
2. Terciptanya manusia dengan satu mulut, dua telinga, dua mata, dua
tangan dan dua kaki itu, sesungguhnya agar manusia lebih untuk
mendengar, melihat, dan melakukan segala kebijakan, tanpa harus
bernyanyi dengan kata – kata yang tak berarti dari mulutnya.
3. Sejenakkanlah dirimu dari kesibukan waktumu untuk sekedar menunduk
dan bertutur syukur kepada Sang Penciptamu dan Pencipta segala
nikmatmu.
PERSEMBAHAN
Laporan ini kupersembahkan kepada:
1. Ayah dan bunda ku tersayang, yang selalu menuntunku dalam menapaki
kehidupan. Hati yang penuh lapang dan kasih sayang semua telah kau
berikan dengan ketulusan. Terimakasih ku hanturkan dari anandamu ini.
2. Semua anak Teknik Mesin Produksi 09. Kalian adalah sahabatku yang
berharga, dan aku merasa terhormat memiliki teman seperti kalian.
Tolong maafkan aku, bila aku pernah meninggalkan lubang di pagar hati
KATA PENGANTAR
Segala puji bagi Tuhan Yang Maha Esa yang telah memberikan rahmat
dan hidayah-Nya sehingga penulis dapat menyelesaikan laporan proyek akhir
dengan judulElectric Two Wheeled Vehicle – KajianPerhitungan Statika -
Kinematika dan Pembuatan Prototipe. Hal ini ditempuh sebagai salah satu
langkah menambah ilmu pengetahuan dan teknologi khususnya dibidang teknik
mesin.
Dalam rangka memenuhi salah satu syarat kelulusan tingkat Diploma di
Jurusan Teknik Mesin Produksi, Fakultas Teknik, Universitas Sebelas Maret
Surakarta, makaselaku mahasiswa dapat mengambil kesempatan dalam proyek
akhir untuk menerapkan dan menguji ilmu yang diperoleh dibangku perkuliahan.
Laporan ini disusun berdasarkan hasil proyek akhir dari tanggal 27 Februari
sampai dengan 27 Juni 2012.
Atas terselesaikannya laporan proyek akhir ini, maka penulis
mengucapkan terimakasih kepada :
1. Bapak Ubaidillah, S.T., M.Scselaku pembimbing Iproyek akhir.
2. Bapak Prof. Muhammad Nizam, S.T., M.T., Ph.D selaku pembimbing
IIproyek akhir.
3. Bapak Heru Sukanto, S.T., M.T. selaku Ketua program D III Teknik
Mesin UNS.
4. Bapak Jaka Sulistya Budi, S.T, M.T. selaku koordinator proyekakhir.
5. Seluruh laboran dan rekan mahasiswa jurusan Teknik Mesin Produksi
serta seluruh pihak yang tidak dapat saya sebutkan satu persatu.
Dalam penulisan laporan dengan judulElectric Two Wheeled Vehicle –
KajianPerhitungan Statika - Kinematika dan Pembuatan Prototipe, penulis
menyadari masih banyak kekurangan. Oleh karena itu kritik dan saran yang
membangun untuk kesempurnaan laporan ini sangat diharapkan dan dapat
berguna dan bermanfaat.
Surakarta, Juli 2012
ELECTRIC TWO WHEELED VEHICLE belakangi pembuatan proyek ini adalahkeinginan untuk membuat sebuah alat transportasi baru yang tidak menggunakan bahan bakar minyak. Salah satu cara mengatasiketergantungan terhadap BBM adalah penggunaan kendaraan dengan energi listrik. Electric two wheeled vehicle adalah kendaraan dengan menggunakan tenaga listrik dan memiliki desain yang unik.
Laporan proyek akhir akan membahas tentang kajian perhitungan statika , kinematika dan pembuatan prototype Electric Two Wheeled Vehicle .Bagian-bagian dari kendaraan ini adalah roda, rangka dalam, rangka tengah, lengan ayun,
roller, dan suspensi. Sistem mekanik merupakan salah satu bagianyang mempunyai peran yang sangat penting untuk kenyamanan berkendara. Komponen kelistrikan terdiri dari kit(dinamo brushless), baterai, kontroler, charger, dan grip gas.
DAFTAR ISI
HALAMAN JUDUL ... i
HALAMAN PENGESAHAN ... ii
SALINAN BERITA ACARA PENDADARAN... iii
MOTTO DAN PERSEMBAHAN... iv
I.5. Luaran ProyekAkhir ... 4
I.6. Manfaat Proyek Akhir ... 4
BAB IIDASAR TEORI ... 5
II.1.Tinjauan Pustaka. ... 5
II.2.Analisa Statika dan Kinematika... 10
II.3.Proses Manufaktur ... 14
II.3.1.Proses Permesinan Mesin Bubut ... 14
II.3.2.Proses Permesinan Mesin Las ... 18
II.3.3.Proses Permesinan Mesin Bor ... 20
BAB IIIPERENCANAAN PROSES KERJA ... 21
III.1.Flow Chart ... 22
III.2.Peralatan Manufaktur ... 23
BAB IV PEMBUATAN DAN PEMBAHASAN... 32
IV.1.Sistem Mekanis. ... 32
IV.2.Proses Pembuatan ... 33
IV.3.Analisa Statika dan Kinematika ... 44
IV.3.1.Analisa Statika... 44
IV.3.2.Analisa Kinematika ... 63
IV.4.Perhitungan Waktu Proses Produksi ... 65
BAB V PENUTUP ... 73
IV.1. Kesimpulan... 73
IV.2. Saran ... 74 DAFTAR PUSTAKA
DAFTAR GAMBAR
Gambar 1.1 Desain dan konstruksi dari Ernest Fraquelli, 1935... 2
Gambar 2.1 Monowheel ... 5
Gambar 3.19 Peralatan keselamatan kerja ... 31
Gambar 4.1 Nama komponen Electric Two Wheeled Vehicle ... 32
Gambar 4.2 Mengelassambungan roda ... 34
Gambar 4.3 Melapisi danmengelingrodadengankaret ban sepeda ... 35
Gambar 4.4 Desain rangka dalam ... 35
Gambar 4.5 Menyatukan dua bagian rangka ... 36
Gambar 4.6 Proses penekukanrangka ... 36
Gambar 4.7 Proses pengelasanpadasetiaptekukan... 36
Gambar 4.8 Menggerinda bekas daripengelasan ... 37
Gambar 4.9 Prosespengeboran... 37
Gambar 4.10 Rangka Tengah ... 37
Gambar 4.11 Pemasangan landasan(flangedesk)... 38
Gambar 4.12 Sambungan las flangedesk dan rangka tengah ... 38
Gambar 4.13 Roller... 39
Gambar 4.14 Proses pemotongan nylon ... 39
Gambar 4.16 Membubutprofil “U” ... 40
Gambar 4.17 Membubutprofil “V” ... 40
Gambar 4.18 Sketsalenganayun ... 40
Gambar 4.19 Mengelasrumah bush ... 41
Gambar 4.20 Pengelasan box baterai... 41
Gambar 4.21 Proses pemberian epoxy ... 42
Gambar 4.22 Pengecatan rangka ... 42
Gambar 4.23 Posisi tumpuan roller ... 44
Gambar 4.24 Posisi pegas ... 47
Gambar 4.25 Lengan ayun bagian atas ... 48
Gambar 4.26 Lengan ayun bagian depan ... 53
Gambar 4.27 Lengan ayun motor ... 58
DAFTAR TABEL
BAB I PENDAHULUAN
1.1 Latar Belakang Masalah
Pada pembuatan suatu kendaraan telah memperhatikan segala aspek mulai
dari fungsi, kenyamanan,kestabilan, kecepatan, dan sebagainya. Dari beberapa
aspek tersebut, maka timbul pemikiran bentuk kendaraan jenis baru yang memiliki
ciri khas. Hemat energi adalah suatu fokus riset dan pengembangan perusahaan
alat transportasi. Suatu sistem energi dikatakan efisien apabila yang mempunyai
kerugian minimal dalam kaitan dengan produksi panas dan suara gaduh. Efisiensi
mungkin ditingkatkan dengan menggunakan suatu sistem pengarah elektrik. (Hart,
2011)
Electric Two Wheeled Vehicle adalah kendaraan yang terdiri dari dua roda
luar yang besar yang benar-benar mencakup semua bagian rangka. Rangka berada
didalam roda, dan biasanya dihubungkan dengan rangka tengah yang diberi
tempat duduk. Roda luar dapat bergerak maju karena reaksi torsi yang dihasilkan
dari motor penggerak dan eksentrisitas pusat gravitasi dari rangka. Pada dasarnya
Electric Two Wheeled Vehicle memiliki konsep yang mirip dengan diwheel.Salah
satu desain yang tercatat adalah yang dibuat oleh Mr. Otto pada tahun 1870.
Namun, konsep diwheel belum mendapat pengakuan secara luas kecuali karena
hobi.
Perancangan diwheel modern telah digunakan hanya pada suatu lembaga
noncommercial berskala kecil sebagai proyek dan atraksi. Penggunaan yang
terdekat denga prinsip diwheel diaplikasi komersil adalah prototipe Andr Costa,
Pemenang ke-3 Kompetisi Desain Peugeot. Rincian disain belum dibuat didepan
umum. Tetapi dilain pihak ada kabar desain konsep yang diuraikan disuatu
keterangan Peugeot diwheel bukanlah suatu diwheel yang benar, karena adanya
penyeimbang dengan dua yang lapisan bertindak sebagai roda/kemudi medan.
Produksi diwheel yang pertama menggunakan desain dan konstruksi dari
Ernest Fraquelli pada tahun 1935 dan dipatenkan tahun 1947,telah ada sejumlah
upaya untuk memanfaatkan keunikan dinamika yang ditawarkan oleh diwheel
perbedaan dari diwheel yang sebelumnya, maka pada perancangan ini meninjau
ulang dari sistem dinamika yang tetap sama dan sesuai dengan teknik kontrol pada
desain sebelumnya.
Gambar 1.1 Desain dan konstruksi dari Ernest Fraquelli, 1935
(http://www.ask.com/encyclopedia/strange_vehicles diakses 7/23/2012 2:45PM)
Bagian paling penting dari electric two wheeled vehicle adalah sistem
mekanik karena modus kegagalan yang utama apabila terjadi suatu kecelakaan
yang fatal terjadi pada sistem mekanik. Selain memberikan keamanan bagi
pengemudi, sistem mekanik juga terdiri dari semua komponen dasar yang
membuat electric two wheeled vehicle dapat bergerak.
Dengan memperhatikan segala aspek mulai dari fungsi, kenyamanan,
kestabilan, kecepatan, hemat energi, dan bebas polusi, maka ini akan memberi
sebuah aspek dalam kendaraan suatu bentuk kendaraan jenis baru yang memiliki
ciri khas. Kendaraan tersebut dinamakan Electric Two Wheeled Vehicle.
Kendaraan ini memiliki konsep kinematika dan dinamika gerak yang khas yang
berbeda dengan kendaraan pada umumnya.
Atas dasar diatas, maka pada proyek akhir ini mengangkat judul Electric
1. Perancangan
Sebelum melakukan eksekusi proyek dilaksanakan, terlebih dahulu merancang
alat dengan membuat sketsa alat dan mendesain dengan autocad.
2. Pembelian part
Setelah melakukan perancangan maka dapat diketahui part apa saja yang akan
digunakan, dan beberapa part dibeli saat dalam proses pembuatan.
3. Pembuatan
Setelah part terkumpul maka alat dapat mulai dikerjakan.
4. Pengujian kinerja alat yang telah dibuat.
Setelah alat selesai dibuat dapat dilakukan pengujian kinerja alat.
5. Penyempurnaan
Setelah melakukan pengujian apabila terdapat beberapa error maka harus
dilakukan perbaikan.
1.2 Rumusan Masalah
Rumusan masalah dalam proyek akhir ini adalah sebagai berikut
1. Bagaimana merancang dan membangun Electric Two Wheeled Vehicle.
2. Bagaimana menganalisa statika, kinematika dasar dan dinamika dasar pada
Electric Two Wheeled Vehicle.
1.3 Tujuan Proyek Akhir
Adapun tujuan proyek akhir dalam proyek akhir ini adalah sebagai berikut
1. Untuk merancang dan membangun Electric Two Wheeled Vehicle.
2. Untuk menganalisa statika, kinematika dasar dan dinamika dasar pada
Electric Two Wheeled Vehicle.
1.4 Batasan Masalah
Adapun batasan masalah dalam proyek akhir ini adalah sebagai berikut
1. Perhitungan statika,kinematika dasar dan dinamika dasar pada keadaan
diam (statis)
2. Perhitungan kekuatan material tidak dilaporkan pada laporan ini.
3. Tidak dilakukan perhitungan sistem pengereman pada laporan ini.
4. Tidak dilakukan perhitungan defleksi rangka.
5. Getaran rangka diabaikan.
1.5 Luaran Proyek Akhir
Adapun luaran proyek akhir dalam proyek akhir ini adalah sebagai berikut
1. Prototipe berupa Electric Two Wheeled Vehicle.
2. Laporan proyek akhir.
1.6 Manfaat Proyek Akhir
Adapun manfaat proyek akhir dalam proyek akhir ini adalah memperoleh
pengetahuan dan pemahaman mengenai perancangan kendaraan serta
menciptakan suatu unit rekayasa yang efektif dan efisien dibandingkan
kendaraan sejenis yang telah ada. Menerapkan ilmu yang sudah diperoleh
selama kuliah dengan mengaplikasikannya dalam suatu bentuk karya nyata
dalam sebuah Electric Two Wheeled Vehicle dan melatih ketrampilan dalam
proses produksi yang meliputi bidang perancangan, pengelasan dan
BAB II DASAR TEORI
2.1 Tinjauan Pustaka
Pada pembuatan suatu kendaraan telah memperhatikan segala aspek mulai
dari fungsi, kenyamanan,kestabilan, kecepatan, dan sebagainya. Dari beberapa
aspek tersebut, maka timbul pemikiran bentuk kendaraan jenis baru yang memiliki
ciri khas. Hemat energi adalah suatu fokus riset dan pengembangan perusahaan
alat transportasi. Suatu sistem energi dikatakan efisien apabila yang mempunyai
kerugian minimal dalam kaitan dengan produksi panas dan suara gaduh. Efisiensi
mungkin ditingkatkan dengan menggunakan sumber energi listrik. (Hart, 2011)
2.1.1 Jenis Kendaraan Darat Listrik a. Monowheel
Monowheel adalah satu roda mirip dengan unicycle. Namun, bukannya
duduk di atas roda, pengendara duduk baik di dalam atau di sampingnya. Roda
adalah cincin, biasanya didorong oleh roda yang lebih kecil menekan bibir
dalamnya. Kebanyakan hanya untuk satu penumpang saja, meskipun untuk dua
penumpang sudah dibangun.
Gambar 2.1 Monowheel
Pertama kali monowheels dibangun di akhir abad 19, sebagian besar
dibangun pada abad ke-20 dan telah menggunakan penggerak motor. Beberapa
pembangun modern yang mengacu pada kendaraan sebagai monocycles ,
meskipun istilah yang juga kadang-kadang digunakan untuk menggambarkan
unicycles bermotor. Sekarang monowheels umumnya dibangun dan digunakan
untuk tujuan kesenangan dan hiburan.
b. Diwheel
Diwheel adalah kendaraan yang terdiri dari dua roda luar yang besar yang
ditahan oleh rangka dalam yang menahan roda luar dengan energi penggeraknya
adalah listrik. Rangka dalam bebas berputar pada roda , yang di dukung oleh as
roda pada umumnya atau roller yang berputar pada bagian dalam permukaan roda.
Desain khas diwheel membuatnya menjadi bentuk dari alat transportasi baru.
Salah satu desain yang tercatat adalah yang dibuat oleh Mr. Otto pada tahun 1870.
Produksi diwheel yang pertama menggunakan desain dan konstruksi dari
Ernest Fraquelli pada tahun 1935 dan dipatenkan tahun 1947,telah ada sejumlah
upaya untuk memanfaatkan keunikan dinamika yang ditawarkan oleh two
Diwheel. Pada tahun 2011 sebuah diwheel modern selesai dibangun dengan
menggunakan sistem elektronik dan robotik.
Gambar 2.2 Diwheel (http://sites.mecheng.adelaide.edu.au/robotics/robotics diakses 7/23/20122:59 PM)
Bagian paling penting dari Diwheel adalah sistem mekanik karena sistem
ini adalah modus kegagalan yang utama apabila terjadi suatu kecelakaan yang
terdiri dari semua komponen dasar yang membuat Diwheel dapat
bergerak. Namun, konsep Diwheel belum mendapat pengakuan secara luas kecuali
karena hobi.
c. Sepeda Motor Listrik
Sepeda motor listrik adalah kendaraan tanpa bahan bakar minyak yang
digerakkan oleh dinamo dan akumulator. Seiring dengan mencuatnya
masalah pemanasan global dan kelangkaan BBM maka kini produsen kendaraan
berlomba-lomba menciptakan kendaraan hibrid, dan sepeda motor listrik termasuk
salah satu di dalamnya. Sampai sekarang di Indonesia telah tersedia tipe dengan
kecepatan 60 km/jam, dilengkapi rem cakram, lampu penerangan dekat dan jauh,
lampu sein, lampu rem serta klakson.
Gambar 2.3 Sepeda Motor Listrik
(http://victorpramusanto272.wordpress.com/green-technology/ diakses 7/23/2012 3:19 PM)
Jarak tempuh terjauh yang dapat dicapai oleh sepeda motor listrik di
Indonesia pun telah meningkat secara signifikan menjadi 80km dan untuk jarak
tempuh sedemikian hanya perlu mengeluarkan biaya Rp. 900. Sedang untuk jalan
menanjak kendaraan mampu hingga sudut kemiringan sampai 30 derajat. Waktu
yang diperlukan untuk mengisi penuh akumulator adalah 8 jam dan akumulator
dapat diisi kapan saja tanpa menunggu habis.
d. Mobil Listrik
Mobil listrik adalah mobil yang digerakkan dengan motor listrik,
menggunakan energi listrik yang disimpan dalam baterai atau tempat penyimpan
ke-20, tapi kemudian popularitasnya meredup karena teknologi mesin pembakaran
dalam yang semakin maju dan harga kendaraan berbahan bakar bensin yang
semakin murah. Krisis energi pada tahun 1970-an dan 1980-an pernah
membangkitkan sedikit minat pada mobil-mobil listrik, tapi baru pada tahun
2000-an lah para produsen kendara2000-an baru menaruh perhati2000-an y2000-ang serius pada
kendaraan listrik. Hal ini disebabkan karena harga minyak yang melambung tinggi
pada tahun 2000-an serta banyak masyarakat dunia yang sudah sadar akan
buruknya dampak emisi gas rumah kaca. Sampai bulan Novemver 2011,
model-model kendaraan listrik yang tersedia dan dijual dipasaran beberapa negara adalah
Tesla Roadster, REVAi, Renault Fluence Z.E., Buddy, Mitsubishi i MiEV,
Tazzari Zero, Nissan Leaf, Smart ED, Wheego Whip LiFe, Mia listrik, dan BYD
e6. Nissan Leaf, dengan penjualan lebih dari 20.000 unit di seluruh dunia (sampai
November 2011), dan Mitsubishi i-MiEV, dengan penjualan global lebih dari
17.000 unit (sampai Oktober 2011).
Gambar 2.4 Mobil listrik (http://www.solopos.com/2012/berita- pilihan/mobil-listrik-2014-mobil-listrik-diproduksi-masal-189430 diakses 7/23/2012 3:22 PM)
Mobil listrik memiliki beberapa kelebihan potensial jika dibandingkan
dengan mobil berbahan bakar minyak. Yang paling utama adalah mobil listrik
tidak menghasilkan emisi seperti kendaraan bermotor. Selain itu, mobil jenis ini
juga mengurangi emisi gas rumah kaca karena tidak membutuhkan bahan bakar
luar negeri pun berkurang, karena bagi beberapa negara maju seperti Amerika
Serikat dan banyak negara Eropa, kenaikan harga minyak dapat memukul
ekonomi mereka. Bagi negara berkembang, harga minyak yang tinggi semakin
memberatkan neraca pembayaran mereka, sehingga menghambat pertumbuhan
ekonomi.
Meskipun mobil listrik memiliki beberapa keuntungan potensial seperti
yang telah disebutkan di atas, tapi penggunaan mobil listrik secara meluas
memiliki banyak hambatan dan kekurangan. Sampai pada tahun 2011, harga
mobil listrik masih jauh lebih mahal bila dibandingkan dengan mobil bermesin
pembakaran dalam biasa dan kendaraan listrik hibrida karena harga baterai ion
litium yang mahal. Meskipun begitu, saat ini harga baterai mulai turun karena
mulai diproduksi dalam jumlah besar. Faktor lainnya yang menghambat
tumbuhnya penggunaan mobil listrik adalah masih sedikitnya stasiun pengisian
untuk mobil listrik, ditambah lagi ketakutan pengendara akan habisnya isi baterai
mobil sebelum mereka sampai di tujuan.
Beberapa pemerintah di beberapa negara di dunia telah menerbitkan
beberapa insentif dan aturan untuk menanggulangi masalah ini, yang tujuannya
untuk meningkatkan penjualan mobil listrik, untuk membiayai pengembangan
teknologi mobil listrik sehingga harga baterai dan komponen mobil bisa semakin
efisien. Pemerintah Amerika Serikat telah memberikan dana hibah sebesar US$2,4
miliar untuk pengembangan mobil listrik dan baterai. Pemerintah China
mengumumkan bahwa mereka akan menyediakan dana sebesar US$15 milyar
untuk memulai industri mobil listrik di negaranya. Beberapa pemerintah lokal dan
nasional di banyak negara telah menerbitkan kredit pajak, subsidi, dan banyak
2.2 Analisa Statika dan Kine matika a. Analisa Statika
Roda pada electric two wheeled vehicle ditopang oleh empat buah lengan
ayun. Lengan ayun ini masing-masing menerima gaya yang diakibatkan oleh
beban yang diberikan oleh pengemudi dan rangka. Masing-masing lengan ayun
bertumpu pada sebuah sendi yang ditempelkan pada rangka. Dan roda ditahan
oleh roller. Gaya yang terjadi tersebut berasal dari reaksi yang diberikan oleh
shock breaker karena adanya beban yang berasal dari pengemudi dan rangka.
Gaya yang terjadi pada shock breaker dapat diketahui dengan
menggunakan hukum Hooke sesuai dengan persamaan 2.1 ,yaitu :
R=− .∆ (2.1)
Keterangan :
k = tetapan pegas
F = gaya
x = selisih panjang pegas setelah dikenai beban
Untuk mengetahui konstanta pegas dilakukan pengukuran langsung pada shock
breaker karena ada empat gaya yang belum diketahui. Jadi untuk mengetahui
shock breaker tersebut dilakukan pengukuran langsung dengan mengambil lima
sample beban yang berbeda dan kemudian diambil nilai rata-rata sehingga
diketahui konstanta pegas. Dan setelah itu dilakukan perhitungan gaya pada
masing-masing lengan ayun dengan pengukuran secara langsung juga.
Perhitungan statika dilakukan dengan cara mencari besarnya gaya yang
terdapat pada tumpuan masing-masing lengan ayun. Dari empat buah lengan
ayun,tiga buah lengan ayun memiliki tumpuan yang sama,yaitu pada tumpuan
sendi dan tumpuan pada roller yang menahan roda. Sedangkan satu buah lengan
ayun memiliki tumpuan sendi dan tumpuan pada motor penggerak. Semua
tumpuan mempunyai fungsi yang sama yaitu menahan gaya yang diakibatkan dari
Gaya yang dihitung adalah gaya yang mengenai tumpuan roll yaitu gaya
F1, F2 , F3 dan F4.
Gambar 2.5 Gaya luar pada roda
Untuk analisa gaya luar yang bekerja pada setiap lengan ayun digunakan
prinsip kesetimbangan benda tegar. Kesetimbangan benda tegar dapat diperoleh
dengan menetapkan gaya pada sumbu x , y dan z sama dengan nol. Dan mome n
pada sumbu x , y dan z sama dengan nol. Sesuai dengan persamaan 2.2 , 2.3 dan
2.4 dapat diketahui kesetimbangan benda tegar (Beer dan Johnston , 2007).
∑ ¶̊= 0 (2.2)
∑ R = 0 (2.3)
∑ R̊= 0 (2.4)
Keterangan :
∑ ¶̊= jumlah momen pada titik acuan x
∑ R= jumlah yang bekerja pada sumbu y
∑ R̊= jumlah yang bekerja pada sumbu x W
F2
F3 F1
Dengan menggunakan persamaan tersebut dapat diketahui gaya luar pada
masing-masing roller yang menahan lengan ayun.
Untuk analisa gaya dalam yang terjadi pada masing-masing lengan ayun
menggunakan persamaan kesetimbangan benda tegar. Gaya yang bekerja pada
masing-masing tumpuan sesuai dengan gambar pada tabel 2.1.
Tabel 2.1 Reaksi pada sambungan (Beer.dkk,2007)
Dengan berpedoman pada tabel 2.1 , maka gaya dalam yang terjadi pada setiap
Gambar 2.6 Gaya dalam yang bekerja pada lengan ayun (Hibbeler,2010)
Dari gaya dalam yang terjadi pada masing-masing lengan ayun dapat diketahui
besarnya gaya normal,gaya geser dan momen bending yang terjadi pada masing –
masing lengan ayun dan dapat digambarkan ke dalam free body diagram.
b. Analisa Kinematika
Analisa sistem kinematika gerak dasar dilakukan untuk mengetahui
besarnya waktu yang diperlukan untuk mencapai kecepatan maksimum.
Gambar 2.7 Gambar roda besar dan motor
Dengan diketahui putaran per menit,dapat menghitung kecepatan sudut
pada motor,maka dapat diketahui kecepatan sudut maksimum roda sesuai dengan
persamaan 2.5 sebagai berikut,
ƺ.6 ƺƺ.6=
ǰƺ
ǰ (2.5)
Setelah diketahui kecepatan sudut maksimum roda,maka dapat diketahui
ǰƺ.6= ǰƺ.6 dǰ (2.6)
Dengan diketahuinya daya motor dan kecepatan sudut motor maksimum makad
dapat menghitung Torsi motor dengan menggunakan persamaan 2.7
(Hibbeler,1997) :
= ɲ ɲƺ.6 (2.7)
Setelah diketahui torsi motor maka dapat diketahui Torsi Roda dengan
menggunakan persamaan 2.8,
ƺ= ƺ (2.8)
Kemudian dihitung momen inersia pada roda sesuai dengan persamaan 2.9
ǰ=Č 1 − d (2.9)
Setelah diketahui momen inersia,sesuai dengan persamaan 2.10,maka dapat
menghitung percepatan sudut maksimum roda.
ǰ= ǰ ǰƺ.6 (2.10)
Kemudian dengan diketahui percepatan sudut sesuai dengan persamaan 2.11,maka
dapat menghitung percepatan maksimum roda.
aǰƺ.6= ǰƺ.6 dǰ (2.11)
Setelah percepatan maksimum diketahui,dengan menggunakan persamaan 2.12
maka dapat mmenghitung waktu maksimum untuk mencapai kecepatan
maksimum.
ɲĖ̊=Ėƺ.6
ƺ.6 (2.12)
2.3 Proses Manufaktur
a. Proses Permesinan Mesin Bubut
Proses bubut merupakan suatu proses pembentukan benda kerja dengan
mesin bubut. Mesin bubut adalah mesin perkakas dengan gerak utama
berputar.Gerak berputar inilah yang menyebabkan terjadi penyayatan oleh alat
potong (tool) terhadap benda kerja.Dengan demikian, prinsip kerja dari mesin
bubut adalah gerak potong yang diilakukan oleh benda kerja yang berputar
(rotasi) pada kedudukan spindel dengan penyayatan oleh pahat yang bergerak
translasi dan dihantarkan pada benda kerja. Pada mesin perkakas bubut ini
a. Gerakan berputaryaitu bentuk gerakan rotasi dari benda kerja pada kedudukan
spindel.
b. Gerakan memanjang yaitu bentuk gerakan apabila arah pemotongan sejajar
dengan sumbu kerja. Gerakan ini disebut juga dengan gerakan pemakanan.
c. Gerakan melintangyaitu bentuk gerakan apabila arah pemotongan tegak lurus
terhadap sumbu kerja. Gerakan ini disebut dengan gerakan melintang atau
pemotongan permukaan.
Gambar 2.8 Gerakan pemakanan pada mesin bubut (Fretz, 1978)
b Jenis-Jenis Pengerjaan Yang Dapat Dilakukan Dengan Mesin Bubut Bentuk-bentuk pekerjaan yang dapat dilakukan dalam proses membubut
dapat dilihat pada gambar di bawah :
Gambar 2.9 Bentuk pengerjaan pada mesin bubut (Fretz, 1978)
a. Pembubutan Muka (Facing) yaitu proses pembubutan yang dilakukan pada
tepi penampangnya atau gerak lurus terhadap sumbu benda kerja, sehingga
diperoleh permukaan yang halus dan rata.
b. Pembubutan tirus (Taper) yaitu proses pembuatan benda kerja berbentuk
konis. Dalam pelaksanaan pembubutan tirus dapat dilakukan denngan tiga
cara, yaitu memutar eretan atas (perletakan majemuk), pergerseran kepala
lepas (tail stock), dan menggunakan perlengkapan tirus (tapper atachment).
c. Pembubutan chamfering yaitu pembubutan yang dilakukan pada sisi sisa
sayatan pahat agar tidak tajam. Pembubutan ini dapat dilakukan dengan
menggeser tool post arah melintang dan memenjang.
d. Pembubutan cutoff yaitu pembubutan yang dilakukan untuk memotong benda
kerja. Pembubutan ini dapat dilakukan dengan menggeser toolpost ke arah
melintang dengan memakai pahat ulir.
e. Pembubutan ulir (Threading) yaitu pembubutan ini dilakukan dengan
menggunakan pahat ulir.
f. Pembubutan borring yaitu proses pembubutan ini bertujuan untuk
memperbesar lubang dengan menggunakan pahat bubut dalam.
g. Pembubutan drilling yaitu pembubutan denggan menggunakan mata bor yang
dipasang pada tailstock. Sehingga akan dihasilkan lubang pada benda kerja.
Pembubutan drilliing ini merupakan pembubutan awal sebelum pembubutan
borring.
h. Pembubutan knurling yaitu pembubutan yang dilakukan pada benda kerja
untuk membuat profil pada permukaan benda kerja. Pembubutan ini
c. Parameter-Parameter Pada Permesinan Bubut
Gambar 2.10 Parameter pahat bubut (Fretz, 1978)
Sudut tatal pada pahat bubut +12-15°
Sudut bebas pahat bubut + 10-13°
a. Kecepatan potong biasanya dinyatakan dalam isitilah m/menit, yaitu
kecepatan dimana pahat melintasi benda kerja untuk mendapatkan hasil yang
paling baik pada kecepatan yang sesuai. Kecepatan potong dipengaruhi oleh
dua faktor, yaitu: 1) kekerasan dari bahan yang akan dipotong, dan 2) jenis
alat potong yang digunakan. Kecepatan potong harus disesuaikan dengan
kecepatan putaran spindel mesin bubut. Untuk keperluan ini digunakan
persamaan 2.13 sebagai berikut: (Fretz, 1978)
1000 n . .Do
v = p (2.13)
Keterangan :
V = kecepatan potong (mm/min)
Do= diameter awal benda kerja (mm)
N = kecepatan putaran (rpm)
b. Asutan (feed)
Asutan (feed) adalah pergerakan titik sayat alat potong per satuan putaran
benda kerja. Dalam pembubutan feed dinyatakan dalam mm/putaran. Asutan
c. Jumlah langkah pemakanan
Pembubutan memanjang dihitung dengan menggunakan persamaan 2.14
(Fretz, 1978) :
Pembubutan permukaan dihitung dengan menggunakan persamaan 2.15
(Fretz, 1978) :
Pembubutan memanjang dihitung dengan menggunakan persamaan 2.16
(Fretz, 1978) :
Pembubutan permukaan dihitung dengan menggunakan persamaan 2.17
Sr = feed motion (mm/rev)
n = kecepatan putaran (rpm)
2.3.2 Proses Permesinan Mesin Las a. Pengertian Pengelasan
Pengelasan merupakan penyambungan dua bahan atau lebih yang
didasarkan pada prinsip-prinsip proses difusi, sehingga terjadi penyatuan bagian
bahan yang disambung. Kelebihan sambungan las adalah konstruksi ringan, dapat
menahan kekuatan yang tinggi, mudah pelaksanaannya, serta cukup ekonomis.
Namun kelemahan yang paling utama adalah terjadinya perubahan struktur mikro
bahan yang dilas, sehingga terjadi perubahan sifat fisik maupun mekanis dari
bahan yang dilas.
Cara yang paling utama digunakan untuk memanasi logam yang dilas
adalah arus listrik. Arus listrik dibangkitkan oleh generator dan dialirkan melalui
kabel ke sebuah alat yang menjepit elektroda diujungnya, yaitu suatu loga m
batangan yang dapat menghantarkan listrik dengan baik.Ketika arus listrik
dialirkan, elektroda disentuhkan ke benda kerja dan kemudian ditarik ke belakang
sedikit, arus listrik tetap mengalir melalui celah sempit antara ujung elektroda
dengan benda kerja.Arus yang mengalir ini dinamakan busur (arc) yang
dapat mencairkan logam.
Gambar 2.11 Prinsip Kerja Las Listrik (Smith, 1992)
Gambar 2.11 Jenis-jenis sambungan las (Smith, 1992)
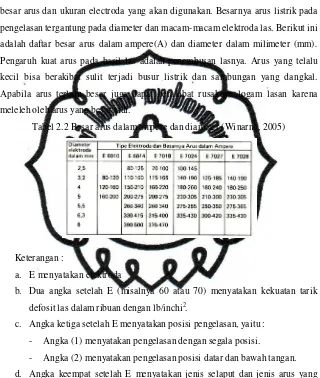
b. Me milih besar arus listrik
Agar hasil pengelasan baik, kuat, dan hemat ada baiknya menentukan
besar arus dan ukuran electroda yang akan digunakan. Besarnya arus listrik pada
pengelasan tergantung pada diameter dan macam-macam elektroda las. Berikut ini
adalah daftar besar arus dalam ampere(A) dan diameter dalam milimeter (mm).
Pengaruh kuat arus pada hasil las adalah penembusan lasnya. Arus yang telalu
kecil bisa berakibat sulit terjadi busur listrik dan sambungan yang dangkal.
Apabila arus terlalu besar juga dapat berakibat rusaknya logam lasan karena
meleleh oleh arus yang besar tadi.
Tabel 2.2 Besar arus dalam ampere dan diameter (Winarno, 2005)
Keterangan :
a. E menyatakan elektroda
b. Dua angka setelah E (misalnya 60 atau 70) menyatakan kekuatan tarik
defosit las dalam ribuan dengan lb/inchi2.
c. Angka ketiga setelah E menyatakan posisi pengelasan, yaitu :
- Angka (1) menyatakan pengelasan dengan segala posisi.
- Angka (2) menyatakan pengelasan posisi datar dan bawah tangan.
d. Angka keempat setelah E menyatakan jenis selaput dan jenis arus yang
2.3.3 Proses Permesinan Mesin Bor
Mesin bor adalah suatu jenis mesin gerakanya memutarkan alat pemotong
yang arah pemakanan mata bor hanya pada sumbu mesin tersebut (pengerjaan
pelubangan). Sedangkan Pengeboran adalah operasi menghasilkan lubang
berbentuk bulat dalam lembaran-kerja dengan menggunakan pemotong berputar
yang disebut bor dan memiliki fungsi untuk membuat lubang, membuat
lubangbertingkat, membesarkan lubang, chamfer.
a. Bagian–Bagian Mesin Bor
Mesin bor yang digunakan pada pembuatan electric two-wheeled vehicle
adalah mesin bor meja. Mesin bor meja adalah mesin bor yang diletakkan diatas
meja. Mesin ini digunakan untuk membuat lubang benda kerja dengan diameter
kecil (terbatas sampai dengan diameter 16 mm). Prinsip kerja mesin bor meja
adalah putaran motor listrik diteruskan ke poros mesin sehingga poros berputar.
Selanjutnya poros berputar yang sekaligus sebagai pemegang mata bor dapat
digerakkan naik turun dengan bantuan roda gigi lurus dan gigi rack yang dapat
mengatur tekanan pemakanan saat pengeboran. Bagian-bagian utama mesin bor
meja antara lain:
a. Motor penggerak
b. Transmisi penggerak
c. Pencekam benda kerja
d. Eretan
e. Pencekan mata bor
b. Kecepatan Potong Pengeboran
Kecepatan potong ditentukan dalam satuan panjang yang dihitung
berdasarkan putaran mesin per menit.Atau secara defenitif dapat dikatakan bahwa
kecepatan potong adalah panjangnya bram yang terpotong per satuan waktu.
Berikut ini adalah tabel kecepatan potong dan kecepatan pemakanan untuk bahan
Tabel 2.3 Kecepatan Potong Dan Kecepatan Pemakanan
(Scharkus dan Jutz, 1996)
Diameter Mata Bor (mm) Ø5 Ø10 Ø15 Ø20 Ø25
Kec. Pemakanan (mm/rev) 0.1 0.18 0.25 0.28 0.31
Kec. Potong (mm/min) 15 18 22 26 29
Dari tabel di atas maka dapat untuk menghitung waktu yang di perlukan dalam
proses pengeboran dengan persamaan 2.18 seperti dibawah ini (Scharkus dan Jutz,
1996) :
T= Ȃ9Ȃ.) ,,2
n (2.18)
Untuk perhitungan waktu pengerjaan sesuai dengan persamaan 2.19 seperti
dibawah ini,
Total waktu perngerjaan = ( Tm . i ) + TS + TU (2.19)
Keterangan :
Itotal = panjang pengeboran atau tebal bahan (mm)
Sr = kecepatan pemakanan (mm/rev)
d = diameter mata bor (mm)
n = kecepatan putaran (rpm)
Tm = waktu permesinan
TS = waktu setting
TU = waktu pengukuran
BAB III
PERENCANAAN PROSES KERJA
III.1 Flow Chart Perencanaan dan Proses Kerja
Keterangan flow chart
Memulai mengerjakan proyek akhir dengan melakukan studi literatur
tentang two wheeled vehicle, setelah melakukan studi literatur melakukan
perencanaan mekanikal, dengan demikian dapat dilakukan sketsa prototip dan
pemilihan komponen-komponennya. Setelah disketsa lalu digambar global secara
3D, setelah digambar maka dapat dikalkulasi, jika disetujui maka digambar secara
detail secara 2D. Setelah desain disetujui dan komponen terkumpul maka sudah
dapat dilakukan perakitan, setelah rangka jadi maka komponen elektrikal dapat
dirakit. Setelah semua terpasang maka dapat dilakukan uji prototype, jika sudah
sesuai yang diinginkan maka memulai mengerjakan laporan, jika masih terjadi
error maka harus dianalisa ulang pada perancangan mekanikal. Setelah semua
selesai maka mendapatkan hasil prototype dan laporan.
3.2 Peralatan Manufaktur a. Peralatan Yang Digunakan
Alat-alat yang digunakan dalam mengerjakan proyek akhir adalah Mesin
las, Mesin bubut, Mesin bor, Mesin gerinda potong, Mesin gerinda, Pemotong
plat, Penekuk plat, Ragum, Alat ukur (jangka sorong, mistar), Penyiku, Penitik,
Penggores, Palu, Kikir, Gunting plat, Kunci – kunci (ring, pas), Peralatan
keselamatan kerja
b. Penjelasan 1. Mesin las
Las busur atau umumnya disebut dengan las listrik adalah suatu proses
penyambungan logam dengan menggunakan tenaga listrik sebagai sumber
panas. Jenis sambungan dengan las listrik ini adalah sambungan tetap
2. Mesin bubut
Mesin Bubut adalah suatu Mesin perkakas yang digunakan untuk
memotong benda yang diputar. Bubut sendiri merupakan suatu proses
pemakanan benda kerja yang sayatannya dilakukan dengan cara memutar
benda kerja kemudian dikenakan pada pahat yang digerakkan secara translasi
sejajar dengan sumbu putar dari benda kerja. Gerakan putar dari benda kerja
disebut gerak potong relatif dan gerakkan translasi dari pahat disebut gerak
umpan.
Gambar 3.3 Mesin bubut
3. Mesin bor
Mesin bor adalah suatu jenis mesin gerakanya memutarkan alat pemotong
yang arah pemakanan mata bor hanya pada sumbu mesin tersebut (pengerjaan
pelubangan). Sedangkan Pengeboran adalah operasi menghasilkan lubang
berbentuk bulat dalam lembaran-kerja dengan menggunakan pemotong
berputar yang disebut bor. Untuk pembuatan electric two wheleed vehicle
menggunakan bor tangan dan bor duduk.
4. Mesin gerinda potong
Fungsi utama mesin gerinda potong adalah untuk memotong suatu benda
dengan jumlah banyak dan lebih cepat. Dalam pembuatan electric two wheleed
vehicle inimesin gerinda potong banyak bigunakan untuk memotong besi pipa
untuk rangka tengah.
Gambar 3.5 Mesin gerinda potong
5.Mesin gerinda
Mesin gerinda merupakan proses menghaluskan permukaan yang
digunakan pada tahap finishing dengan daerah toleransi yang sangat kecil
sehingga mesin ini harus memiliki konstruksi yang kokoh. Dalam pembuatan
electric two wheleed vehicle ini menggunakan mesin gerinda dan gerinda
tangan.
Gambar 3.6 Gerinda tangan
6. Pemotong plat
Pemotong plat adalah suatu alat yang dimana berfungsi untuk memotong
Gambar 3.7 Pemotong plat
7. Penekuk plat
Alat yang digunakan untuk membuat bentuk bersudut pada benda kerja
logam yang tipis.
Gambar 3.8 Penekuk plat
8. Ragum
Ragum adalah suatu alat penjepit untuk menjepit benda kerja yang akan
dikikir,dipahat,digergaji,di tap,di sney,dan lain-lain. Dengan memutar tangkai
(handle) ragum, maka mulut ragum akan menjepit atau membuka/melepas
benda kerja yang sedang dikerjakan. Bibir mulut ragum harus dijaga jangan
sampai rusak akibat terpahat,terkikir dan lain sebagainya
9. Alat ukur (Jangka sorong dan mistar)
a. Jangka sorong adalah alat untuk mengukur panjang, tebal, kedalaman lubang dan diameter luar dalam suatu benda dengan batas ketelitian 0,1
mm. Jangka sorong mempunyai dua rahang, yaitu rahang tetap dan rahang
sorong. Pada rahang tetap terdapat skala utama dan pada rahang sorong
terdapat skala nonius atau skala vernier. Skala nonius ini panjangnya 9 mm
yang terbagi menjadi 10 skala dengan tingkat ketelitian 0,1 mm.
Gambar 3.10 Jangka sorong
b. Mistar pada umumnya memiliki skala terkecil 1 mm atau 0,1 cm. Mistar mempunyai ketelitian sebesar setengah dari skala terkecil yang dimiliki
oleh mistar
Gambar 3.11 Mistar
(http://okbozz.com/products_pictures/penggaris_besi.jpg
diakses 7/27/2012 1:19 PM)
10. Penyiku
Penyiku adalah alat untuk mengetahui tingkat kesikuan suatu sudut benda
Gambar 3.12 Penyiku
11. Penitik
Penitik adalah alat yang digunakan untuk membuat lobang pada benda
kerja. Penitik terbuat dari besi yang ujungnya runcing membentuk sudut 30-90
derajat. Dan cara pemakaiannya adalah pegang penitik dengan tangan kiri,
tempatkan pada benda. Penitik harus tegak lurus dengan bahan. Penitik
dipukul satu kali dengan pemukul yang ringan, serta periksa posisinya jika
sudah tepat baru dipukul dengan kuat agar didapatkan titik yang jelas, dengan
syarat jangan terlalu keras
Gambar 3.13 Penitik
(http://lh4.ggpht.com/-cGkZvvGVPg4/Tz87TEIYmhI/AAAAAAAAASM/viHe
Dt7j4XE/clip_image008%25255B3%25255D.jpg diakses
12. Penggores
Penggores adalah alat yang digunakan untuk menandai ukuran pada benda
kerja atau bahan yang akan diolah.
Gambar 3.14 Penggores
(http://3.bp.blogspot.com/-
7noHswz0Rvk/TbcecssJ-HI/AAAAAAAAB4E/ERLV7Egsrr0/s1600/scribers.gif
diakses 7/27/2012 1:34 PM)
13. Palu
Palu adalah alat yang digunakan untuk membuka atau memasang suku
cadang dengan cara pemukulan/dipukul. Kepala palu dipasang dengan
pegangannya pada dua arah untuk mempermudah pemegangan. Bahan standar
palu biasanya baja keras tetapi banyak juga palu yang dibuat dari bahan lain
misalnya plastik, karet, dan lain lain.
Gambar 3.15 Palu
14. Kikir
Kikir adalah alat yang digunakan untuk mempertajam suatu benda seperti
gergaji atau untuk memperhalus suatu benda kerja. Kikir terdapat beberapa
bentuk antara lain : kikir persegi, kikir persegi panjang, kikir segitiga, kikir
Gambar 3.16 kikir
15. Gunting plat
Gunting plat digunakan untuk menggunting plat tipis yang tidak mungki n
dilakukan dengan mesin potong plat.
Gambar 3.17 Gunting plat
16. Kunci
Kunci-kunci digunakan untuk mengencangkan atau mengendurkan baut
yang akan dipasang atau dilepas pada suatu benda.
17. Peralatan keselamatan kerja
Peralatan keselamatan kerja mutlak digunakan agar user atau orang
disekelilingnya aman dan mengurangi resiko kecelakaan kerja.
BAB IV
PEMBUATAN DAN PEMBAHASAN
4.1 Sistem Mekanis
Electric Two Wheeled Vehicle adalah kendaraan roda dua dengan posisi
roda sejajar dan terletak pada satu sumbu roda, yang digerakkan oleh motor
(dinamo brushless) dan sumber tenaganya dari sebuah batery lithium yang dapat
diisi ulang sehingga tidak menggunakan bahan bakar minyak. Berikut adalah
gambar dari Electric Two Wheeled Vehicle dan nama komponen-komponennya:
Gambar 4.1 Nama komponen Electric Two Wheeled Vehicle
a. Roda (Wheel)
Roda adalah bagian penting dalam kendaraan ini, selain memiliki fungsi
sebagai pengggerak juga sebagai tempat dimana rangka dalam bertumpu. Peran
roda bagian dalam dan yang luar adalah untuk menyediakan kontak gerakan putar
antara rangka yang bagian dalam dan sistem pengarah Electric Two Wheeled
Vehicle dan sebagai pondasi pendukungan beban.
b. Rangka dalam
Rangka dalam berbentuk segienam berfungsi sebagai ruji-ruji roda luar yang
ditahan oleh lengan ayun dan suspensi serta roller. Rangka dalam bagian kiri dan
c. Rangka tengah
Rangka tubular terbuat dari pipa baja lunak(mild steel) yang
ditekuk(bending) dan dilas dengan landasan (flangedesk) yang telah diberi lubang
untuk sambungan baut dengan rangka segienam. Rangka ini menopang beberapa
komponen seperti : jok, sabuk pengaman, baterai, dan kemudi.
d. Lengan ayun
Lengan ayun menahan rangka segienam dengan roda yang ditahan oleh
roller sehingga roda masih dapat berputar secar bebas. Lengan ayun tersebut
diletakkan sesuai dengan sudut tertentu sehingga gaya yang ditahan seimbang.
Pada ujung lengan ayun terdapat roller yang menahan yang memiliki alur tertentu
sehingga menahan roda agar roda luar tidak tergelincir keluar.
e. Motor pe nggerak
Pada electric two wheeled vehicle penggeraknya terdiri dari dua dinamo
brushless bertenaga listrik dari baterai dengan kontrol kemudi sesuai dengan
sepeda listrik. Masing-masing motor listrik ditahan oleh lengan ayun yang
sistemnya sama seperti pada kendaraan bermotor, dengan sistem suspensi untuk
menjaga kontak motor dengan roda luar.
f. Sistem pengereman
Pada electric two wheeled vehicle menggunakan rem cakram denga n
sistem pengereman mekanik yang terdiri dari tuas rem yang dihubungkan dengan
kabel ke piringan cakram. Rem ini berfungsi untuk menghentikan putaran motor
sehingga kendaraan berhenti melaju.
4.2 Proses Pembuatan
Hal utama yang perlu diperhatikan sebelum melakukan proses produksi
adalah persiapan. Persiapan merupakan bagian terpenting didalam mewujudkan
sebuah rancangan menjadi sebuah produk yang bisa digunakan. Dengan
melakukan persiapan diharapkan apa yang akan dikerjakan dalam proses produksi
dapat berjalan dengan lancar dan efisien waktu.
Agar dalam proses produksi dapat berjalan dengan lancar dan efisien
waktu pada pembuatan electric two wheeled vehicle memiliki urutan langkah
1. Membuat roda
2. Membuat rangka dalam
3. Membuat rangka tengah
4. Membuat roller
5. Membuat lengan ayun
6. Membuat tempat baterai
7. Mengecat
a. Pembuatan roda
Roda berfungsi sebagai alat untuk menggerakan electric two wheeled
vehicle ni agar bisa melaju dan berbelok seperti alat transportasi pada umumnya.
Langkah pembuatan roda ini meliputi :
1. Menyiapkan alat dan bahan yang akan digunakan.
2. Memotong pipa almunium sesuai ukuran.
3. Membentuk profil lingkaran menggunakan mesin roll sesuai dengan desain.
Pada proses rol ini diserahkan kepada bengkel spesialis rol.
4. Memotong sisa pengerolan kemudian mengelas sambungan pipa dengan las
asitelin.
Gambar 4.2 Mengelas sambungan roda
5. Melapisi roda dengan karet ban sepeda dengan cara mengelem dan mengeling
Gambar 4.3 Melapisi dan mengeling roda dengan karet ban sepeda.
b. Pembuatan rangka dalam
Gambar 4.4 Desain rangka dalam
Dalam pembuatan Electric Two Wheeled Vehicle pengerjaan pertama
adalah pembuatan rangka, karena rangka merupakan bagian utama. Langkah
pengerjaan rangka adalah sebagai berikut :
1. Menyiapkan alat dan bahan yang akan digunakan.
2. Memotong material besi kotak dengan ukuran dan profil pemotongan sesuai
gambar desain.
3. Menyatukan dua bagian rangka dalam dengan cara mengelas titik pada
beberapa sisi supaya pada saat menekuk hasil penekukan dua rangka ini
ukurannya dapat identik.
Gambar 4.5. Menyatukan dua bagian rangka
4. Menekuk satu persatu bagian tekukan sehingga membentuk rangka dalam.
Gambar 4.6 Proses penekukan rangka
5. Mengelas setiap tekukan pada proses pembuatan rangka.
6. Menggerinda bekas sisa–sisa dari pengelasan supaya bagian yang dilas tampak
rapi
Gambar 4.8 Menggerinda bekas dari pengelasan
7. Mengelas dudukan lengan ayun pada rangka Dalam pengelasan ini di
butuhkan ketelitian ,karena harus mempresisikan dengan rangka pada sisi
yang lain.
8. Mengebor rangka dengan diameter 8 mm untuk pasangan dengan flangedesk.
Gambar 4.9 Proses pengeboran
c. Pembuatan rangka tengah
Rangka tengah terbuat dari pipa baja karbon yang ditekuk(bending) dan
diberi landasan (flangedesk) yang telah diberi lubang untuk sambungan baut
dengan rangka segienam. Rangka ini menopang beberapa komponen seperti : jok,
sabuk pengaman, baterai, dan kemudi.Pembuatan rangka dalam ini meliputi :
1. Menyiapkan alat dan bahan.
2. Memotong besi pipa Ø3/4inch dengan panjang 170 cm
3. Mengerol pipa sesuai desain. Pada proses rol ini diserahkan kepada bengkel
spesialis rol.
4. Memasang landasan(flangedesk) pada rangka dengan sambungan baut
Gambar 4.11 Pemasangan landasan(flangedesk)
5. Mengelas pipa yang sudah diroll ke landasan(flangedesk)
d. Pembuatan roller
Gambar 4.13 Roller
Langkah pembuatan roller
1. Menyiapkan alat dan bahan yang akan digunakan
2. Memotong nilon dengan ukuran yang tersedia 80 mm. sebanyak 6
potongan.
Gambar 4.14 Proses pemotongan nylon
3. Membubut facing sehingga panjang roller 70mm kemudian
membuat lubang bengan bor hingga diameter 10mm sampai
tembus
4. Membuat alur “U” terlebih dahulu untuk awalan sebelum membuat
alur “V” pada roller.
Gambar 4.16 Membubut profil “U”
5. Membuat alur “V” sesuai gambar desain
Gambar 4.17 Membubut profil “V”
6. Membubut dalam untuk rumah bearing hingga diameter 23mm
e. Pembuatan lengan ayun
Gambar 4.18 Sketsa lengan ayun Langkah-langkah pembuatan lengan ayun, meliputi :
2. Memotong besi kotak 10x30 mm ,dengan ukuran panjang 380 mm
kemudian mengebor.
3. Mengelas rumah bush kedalam lengan ayun.
Gambar 4.19 Mengelas rumah bush
f. Pembuatan kotak baterai
Gambar 4.20 Pengelasan box baterai
Langkah – langkah pembuatan kotak baterai adalah sebagai berikut :
1. Menyiapkan alat dan bahan.
2. Memotong plat lembaran 1 mm sesuai pola dan ukuran desain kotak baterai
untuk bagian wadah dan tutupnya.
3. Memberi tanda menggunakan mistar dan penggores pada bagian plat yang
akan ditekuk.
4. Menekuk plat sesuai dengan tanda dengan mesin penekuk plat.
6. Mengelas bagian wadah dan tutupnya dengan diberi engsel.
7. Menggerinda sudut-sudut yang tajam supaya rapi.
g. Proses Pengecatan
Langkah-langkah proses pegecatan antara lain :
1. Menyiapkan alat dan bahan
2. Mengamplas semua bagian yang akan dicat. Pengamplasan bertujuan untuk:
a. Menghilangkan korosi dan kotoran yang menempel pada rangka
b. Membuat permukaan yang akan dicat menjadi rata
3. Mencuci sampai bersih komponen yang akan dicat.
4. Mengeringkan (menjemur) komponen yang akan dicat.
5. Memberi lapisan cat dasar dengan epoxy.
Gambar 4.21 Proses pemberian epoxy
6. Setelah kering mendempul kemudian bagian yang kurang rata.
7. Mengamplas kembali dempul yang sudah kering sampai rata.
8. Mengecat semua komponen sesuai dengan warna desain.
Gambar 4.22 Pengecatan rangka
h. Proses perakitan
Perakitan merupakan tahap terakhir dalam proses perancangan dan
pembuatan suatu mesin atau alat, dimana suatu cara atau tindakan untuk
menempatkan dan memasang bagian–bagian dari suatu alat yang akan digabung
menjadi satu kesatuan menurut pasangannya, sehingga akan menjadi alat yang
siap digunakan sesuai dengan fungsinya.
Beberapa hal yang harus diperhatikan sebelum memulai perakitan
komponen, antara lain :
1. Menyiapkan semua alat–alat bantu untuk proses perakitan.
2. Komponen siap dipakai atau dipasangkan.
3. Mengetahui jumlah komponen yang akan dirakit.
4. Mengetahui cara pemasangan dan urutan perakitan komponen denga n
benar.
Komponen – komponen yang dirakit, antara lain :
1. Rangka dalam
2. Rangka tengah
3. Lengan ayun
4. Shock breaker / suspensi
5. Roller
6. Roda (kanan dan kiri)
7. Sistem rem (handle, kabel rem, kaliper dan cakram)
8. Komponen kelistrikan (baterai, kontrol, handel gas, dan kit/motor)
9. Jok set
10.Boardesk
Langkah Perakitan
Langkah – langkah perakitan electric two wheeled vehicle :
1. Menyiapkan rangka (rangka dalam dan rangka tengah) yang akan dirakit.
2. Merakit roller kedalam lengan ayun.
3. Merakit lengan ayun kedudukan rangka yang sudah disiapkan.
4. Memasang shock breaker pada lengan ayun dan rangka.
7. Memasang jok set.
8. Memasang komponen kelistrikan (handle gas, kontrol, baterai dan
kabel-kabel).
9. Memasang komponen pengereman (handle rem, kabel rem, cakram da n kaliper).
4.3 Analisa Statika dan Kine matika
4.3.1 Analisa Statika
Statika dihitung dengan cara membagi gaya yang diterima dari ke empat
lengan ayun. Masing-masing lengan ayun dihitung masing-masing gaya pegasnya.
Perhitungan gaya pada pegas dihitung dengan menggunakan hukum Hooke sesuai
dengan persamaan 2.1 R=− .∆ Keterangan :
k = tetapan pegas
F = gaya
x = selisih panjang pegas setelah dikenai beban
Konstanta pegas diketahui dari percobaan uji pegas. Pegas yang di uji sesuai
dengan urutan seperti pada gambar.
Untul pengukuran gaya pada pegas menggunakan persamaan 2.1muntuk beban
diambil 5 sampel beban yang berbeda. Jenis pegas yang diukur sama,maka
konstanta pegas juga sama.
1. Percobaan 1
Beban 1 = 45 kg = 450 N
Panjang awal sebelum dikenai beban = 126 mm
Panjang setelah dikenai beban = 120,8 mm
K1 = 86,54 N/mm
2. Percobaan 2
Beban 2 = 52 kg = 520 N
Panjang awal sebelum dikenai beban = 126 mm
Panjang setelah dikenai beban = 119,4 mm
K2 = 78,79 N/mm
3. Percobaan 3
Beban 3 = 60 kg = 600 N
Panjang awal sebelum dikenai beban = 126 mm
Panjang setelah dikenai beban = 116,2 mm
K3 = 61,22 N/mm
4. Percobaan 4
Beban 4 = 65 kg = 650 N
Panjang awal sebelum dikenai beban = 126 mm
Panjang setelah dikenai beban = 114,1 mm
K4 = 54,62 N/mm
5. Percobaan 5
Beban 5 = 64 kg = 640 N
Panjang awal sebelum dikenai beban = 126 mm
Penjang setelah dikenai beban = 114,9 mm
Dari kelima percobaan tersebut,kemudian dihitung konstanta rata-rata dari kelima
variabel tersebut dengan rumus sebagai berikut :
ǰĖrĖ ǰĖrĖ = =
=s ,= s, o Č, =, = ,
=
= 67.77 /11
Konstanta pegas digunakan untuk menghitung gaya yang mengenai lengan ayun.
Untuk mencari gaya yang mengenai lengan ayun diperlukan panjang pemendekan
pegas. Panjang pemendekan pegas diukur dari selisih panjang sebelum dinaiki
pengemudi dengan setelah dinaiki pengemudi.
1. Panjang pegas pada saat keadaan terpasang dan tanpa pengemudi
Gambar 4.24 Posisi pegas
Panjang awal pegas 1 = 123,8 mm
Panjang awal pegas 2 = 123,4 mm
Panjang awal pegas 3 = 120,9 mm
Panjang awal pegas 4 = 124,6 mm
2. Panjang pegas pada saat keadaan terpasang dan tanpa pengemudi
Panjang pegas 1 setelah dibebani pengemudi = 125,5 mm
Panjang pegas 2 setelah dibebani pengemudi = 113,15 mm
Panjang pegas 3 setelah dibebani pengemudi = 110,1 mm
Panjang pegas 4 setelah dibebani pengemudi = 118,45 mm
Pegas 1
Pegas 4
Pegas 3
3. Pemendekan pegas setelah dikenai beban ∆ Č= 1,7 11
∆ = 10,25 11 ∆ 2= 10,8 11 ∆ = 6,15 11
Setelah diketahui pemendekan pegas. Maka dapatdiketahui besarnya gaya yang
bekerja pada pegas tersebut dengan menggunakan hukum Hooke pada persamaan
2.1 sebagai berikut.
R= .∆
Gaya yang bekerja pada masing-masing pegas : RČ= 115,209
R = 694,63 R2= 731,916 R = 416,785
Gaya yang bekerja pada pegas digunakan untuk mencari besarnya gaya pada
masing tumpuan dan gaya luar yang bekerja. Gaya yang diterima
masing-masing lengan ayun dihitung dengan menggunakan prinsip statika struktur.
a. Pada lengan ayun bagian atas
Pada lengan ayun bagian atas dihitung gaya mengenai tumpuan pada roller
dan lengan ayun.
a. Gaya luar
R = 115,209
R6=R cos 87° = 115,209 cos 87° = 6,03 R =R sin 87° = 115,209 sin 87° = 115,05
6= cos 42° = sin 42°
6 = cos 85° = sin 85°
∑ ¶ = 0 R 60 11+ 320 = 0
=−21,57
= sin 85°
−21,57 = sin 85° = Č,=
ins=°
6 = cos 85°
=−21,65 cos 85°
=−1,887
∑ R = 0 +R − = 0
−21,57 + 115,05 − = 0
= 115,05 − 21,57
= 93,48
= sin 42°
93,48 = sin 42°
=o2, s in °
= 139,7
6= cos 42°
6= 139,7 cos 42°
= 103,82 ∑ R̊= 0
6− R 6+ 6− = 0
103,83 − 6,03 + (−1,887 )− = 0
= 103,83 − 6,03 + (−1,887 )
= 95,91
b. Gaya Dalam
̊=− 6
=− 6 (desak)
=−103,82
=−103,82
̊=−
=−
=−93,48
=−93,48
¶̊=− .
= 0
¶ =− . 0 ¶ = 0
= 60 11
¶ =− . 60 11
=−93,48 . 60 11
=−5608,8 11
Potongan Q-Q kiri
̊=− 6+R6
=−103,82 + 6,03
=−97,79
=−97,79
̊=− +R
=− +R
=−93,48 + 115,05
= 21,57
¶̊=− . + (R −60 11 )
= 60 11
¶ =− . + (R − 60 11 )
¶ =−93,48 . 60 11+ (115,05 60 11 − 60 11 ) =−93,48 . 60 11+ 0
=−5608,8 11
= 320 11
¶ =− . + (R − 60 11 )
Free Body Diagram
NFD
b. Pada lengan ayun bagian depan
Pada lengan ayun bagian depan dihitung gaya mengenai tumpuan pada roller
dan lengan ayun.
Gambar 2.26 Lengan ayun bagian depan
a. Gaya luar
R = 694,643
R6=R cos 78° = 694,643 cos 78° = 144,42 R =R sin 78° = 694,643 sin 78° = 679,46
6= cos 35°
= sin 35°
6 = cos 86°
b. Gaya Dalam
· Potongan P-P Kiri
̊=− 6
=− 6 (desak)
=−788,43
=−788,43
̊=
=
= 552,06
= 552,06 ¶̊= .
= 0 ¶ = . 0 ¶ = 0
= 60 11 ¶ = . 60 11
= 552,06 . 60 11
· Potongan Q-Q kiri
̊=− 6+R6
=− 6+R6
=−788,43 + 144,42
=−644,01
=−644,01
̊= − R
= − R
= 552,06 − 679,46
=−127,4
=−127,4
¶̊= . − (R − 60 11 )
= 60 11
¶ = . −(R − 60 11 )
¶ = 552,06 . 60 11 − (648,5 60 11 − 60 11 ) = 552,06 . 60 11+ 0
= 33123,6 11
= 320 11
¶ = . − (R − 60 11 )
Free Body Diagram
NFD
c. Pada lengan ayun motor
Pada lengan ayun penyangga motor dihitung gaya mengenai tumpuan pada
roller dan lengan ayun.
Gambar 2.27 Lengan ayun motor
· Gaya luar
R= 731,926 Rcos 50° = 470,47 Rsin 50° = 560,68 a= 130 11
= 80 11
Gaya yang terjadi pada kasus tersebut dapat diselesaikan dengan menggunakan
hukum Newton
∑ ¶= 0 Titik C sebagai acuan,maka :
∑ ¶ = 0
Rsin 50°( ) +Rcos 50°(a)− sin 25° + + cos 25° a = 0 44854,41 + 61160,64− 169,05 + 117,82 = 0
106015,05− 51,23 = 0
=Č, ,Č=,,=
=Č, 2 = 2069,39
∑ R̊= 0
6− Rcos 50°− cos 25° = 0
6 = 470,47 + 2069,39 (cos 25°)
= 2353,62 ∑ R = 0
+Rsin 50°− sin 25° = 0
=−560,68 + 2069,39 (sin 25°)
= 308,46
· Gaya dalam
· Potongan P-P Kiri
̊=− 6
=− 6
=−2353,62
=−2353,62
=−
=−308,46
=−308,46
¶̊=− + 6(a)
= 0 ¶ = 0
= 80 11,k= 130 11
¶ =−308,46 80 11 + 2353,62 (130 11) = 281293,8 11
· Potongan Q-Q kiri
̊=− 6+Rcos 50°
=− 6+Rcos 50°
=−2353,62 + 470,47
=−1883,15
=−1883,15
̊=− +Rsin 50°
=− +Rsin 50°
=−308,46 + 560,68
= 252,22
¶̊=− − Rsin 50°( − ) + 6(a)
= 80
¶ =−308,46 80 11 − 560,68 (0) + 2353,62 (130 11) = 281293,8 11
= 400
¶ =− − Rsin 50°( − ) + 6(a)
=−308,46 400 11 −560,68 (400 11) + 2353,62 (130 11)
= 3033 11
· Free Body Diagram
NFD
SFD
d. Pada Lengan Ayun belakang
Pada lengan ayun bagian belakang dihitung gaya mengenai tumpuan pada
roller dan lengan ayun.
Gambar 2.28 Lengan ayun belakang
a. Gaya luar
R = 416,785
R6=R cos 62° = 416,785 cos 62° = 195,67 R =R sin 62° = 416,785 sin 62° = 367,99
6= cos 80°
= sin 80°
6 = sin 63°
= cos 63°
∑ ¶ = 0 R 260 11 − 320 = 0
= 298,99
298,99 = cos 63°
= os,oo e 2°
= 658,59
6 = sin 63°
= 298,99 sin 63°
= 586,8
∑ R = 0 − +R + = 0 −298,99 + 367,99 + = 0
=−69
= sin 80°
−69 = sin 80° = o
ins,°
=−70,06
6 = cos 80°
6 =−70,06 cos 80°
=−12,17
∑ R̊= 0
6+R6− 6+ = 0
b. Gaya dalam
· Potongan Q-Q Kanan
̊=− 6
=− 6 (desak)
=−586,8
=−586,8
̊=−
=−
=−298,99
=−298,99 ¶̊= .
= 0 ¶ = . 0 ¶ = 0
= 60 11 ¶ = . 60 11
= 298,99 . 60 11
· Potongan P-P kanan
̊=− 6+R6
=− 6+R6
=−586,8 − 195,67
=−391,13
=−391,13
̊=− +R
=− +R
=−298,99 + 195,67
=−103,32
¶̊= . − (R − 60 11 )
= 60 11
¶ = 298,99 . 60 11 − (195,67 60 11 − 60 11 ) ¶ = 298,99 . 60 11 − 0
= 17939,4 11
= 320 11
¶ = . − (R − 60 11 )
c. Free Body Diagram
NFD
SFD
4.3.2 Analisa Kinematika
Analisa sistem kinematika gerak dasar dilakukan untuk mengetahui
besarnya waktu yang diperlukan untuk mencapai kecepatan maksimum.
Asumsi :
1. Berat dua buah roda sebesar 10 kg
2. Berat rangka dalam,rangka tengah,motor penggerak,roller,lenga n
ayun,pengemudi dan komponen yang ada di dalamnya sebesar 150 kg
3. Diameter luar roda 1,5 m
4. Diameter motor penggerak 16 cm = 0,16 m
5. Besar putaran motor 330 Rpm (kecepatan tanpa beban diukur denga n
menggunakan tachometer)
6. Daya motor sebesar 350 watt (diketahui dari spesifikasi sistem kontrol)
Dengan diketahui putaran per menit,maka dapat menghitung kecepatan sudut pada
motor :
330 Rpm = 5,5 Rps
Setelah itu diubah kedalam bentuk radian :
ɲƺ.6= 330
ǰ rĖ ɲ t r