i
TUGAS AKHIR – TM 091486PREDIKSI SISA UMUR PADA ROTATING MACHINERY DENGAN METODE ANFIS
(ADAPTIVE NEURO-FUZZY INFERENCE SYSTEMS)
MOHAMMAD TAUFAN NRP. 2106 100 147
Dosen Pembimbing Dr. Muh. Nur Yuniarto
JURUSAN TEKNIK MESIN Fakultas Teknologi Industri
Institut Teknologi Sepuluh Nopember Surabaya 2010
[Halaman ini sengaja dikosongkan]
FINAL PROJECT– TM 091486
REMAINING USEFUL LIFETIME PREDICTION OF ROTATING MACHINERY USING ANFIS
(ADAPTIVE NEURO-FUZZY INFERENCE SYSTEMS)
MOHAMMAD TAUFAN NRP. 2106 100 147
Advisor
Dr. Muh. Nur Yuniarto
MECHANICAL ENGINEERING Faculty of Industrial Technology
Sepuluh Nopember Institute of Technology Surabaya 2010
[Halaman ini sengaja dikosongkan]
PREDIKSI SISA UMUR PADA ROTATING MACHINERY DENGAN METODE ANFIS
(ADAPTIVE NEURO-FUZZY INFERENCE SYSTEMS)
TUGAS AKHIR
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
pada
Program Studi S-1 Jurusan Teknik Mesin Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember
Oleh :
MOHAMMAD TAUFAN NRP. 2106 100 147
Disetujui oleh Tim Penguji Tugas Akhir : 1. Dr. M. Nur Yuniarto
NIP. 197506301998021001 ...(Pembimbing I) 2. Ir. Bambang Pramujati, MSc. Eng., Ph.D
NIP. 196912031994031001 ... (Penguji I) 3. Ir. Witantyo, M.Eng.Sc
NIP. 196303141988031002 ... (Penguji II) 4. Ir. Sudiyono Kromodihardjo, M.Sc. Ph.D
NIP. 195208011978031005 ... (Penguji III) SURABAYA
Agustus, 2010
[Halaman ini sengaja dikosongkan]
PREDIKSI SISA UMUR PADA ROTATING MACHINERY DENGAN METODE ANFIS (ADAPTIVE NEURO-FUZZY
INFERENCE SYSTEMS)
Nama Mahasiswa : Mohammad Taufan
NRP : 2106.100.147
Jurusan : Teknik Mesin FTI – ITS Dosen Pembimbing: Dr. Muhammad Nur Yuniarto
Abstrak
Prognosa kerusakan pada sebuah rotating machinery menjadi aspek penting dalam penerapan maintenance karena terjadinya kerusakan dapat mengakibatkan turunnya produktifitas sebuah perusahaan. Pengukuran getaran adalah salah satu metode yang cukup baik untuk mengetahui kondisi mesin karena getaran merupakan indikator kondisi mekanikal dan indikator awal dari adanya cacat pada suatu mesin secara menyeluruh. Penerapan Artificial Intelligence dalam pemrosesan data getaran untuk prognosa kerusakan semakin meningkat. Hal ini disebabkan karena keputusan yang dihasilkan tidak subjektif dan performa prediksinya lebih baik. Prastowo (2006) memanfaatkan JST (Jaringan Syaraf Tiruan) dalam memprediksi sisa umur dari sebuah mesin, akan tetapi error yang terjadi dirasa masih cukup besar. Untuk itu diperlukan sebuah metode lain yang diharapkan memiliki performa lebih baik.
Di dalam penelitian ini akan dilakukan prediksi sisa umur pakai dari sebuah rotating machinery dengan metode ANFIS (Adaptive Neuro-Fuzzy Inference Systems) menggunakan program Matlab. Data getaran yang diambil menggunakan sensor getaran pada rentang waktu tertentu akan digunakan untuk memprediksi degradasi unjuk kerja dari suatu mesin. Data getaran inilah yang akan digunakan untuk data training dan testing pada ANFIS. Tipe membership function segitiga, lonceng dan trapezoidal akan dibandingkan dalam proses training dan testing
menggunakan sistem hybrid dan backpropagation. Pengaruh penambahan jumlah membership function sebanyak 2 buah juga akan dilihat pada proses tersebut.
Dari penelitian ini diketahui bahwa ANFIS dengan sistem pembelajaran hybrid menghasilkan average error yang lebih baik daripada backpropagation. Uji coba dengan data testing didapatkan bahwa ANFIS mampu memprediksi sisa umur pakai dari data yang diinputkan kepadanya. Testing error ketika menggunakan membership function tipe segitiga sebesar 0.002.
Pengaruh penambahan 2 membership function pada sistem hybrid akan memperbesar error sedangkan pada backpropagation akan menurunkan error.
Kata kunci : Rotating Machinery, Prognostic, Prediksi sisa umur, Vibration monitoring, Anfis
REMAINING USEFUL LIFETIME PREDICTION OF ROTATING MACHINERY USING ANFIS (ADAPTIVE
NEURO-FUZZY INFERENCE SYSTEMS)
Name : Mohammad Taufan
NRP : 2106.100.147
Departement : Teknik Mesin FTI – ITS Academic Supervisor : Dr. Muhammad Nur Yuniarto
Abstract
The failure prognosis on a rotating machinery becomes an important aspect in the implementation of maintenance because of this failure can lead productivity degradation of a company.
Vibration measurement is one method that is good enough to know the machine condition because vibration is an indicator of mechanical condition and early indicator of the defects in a machine. Application of Artificial Intelligence in failure prognosis is increasing. It is because the decisions are not subjective and better prediction performance. Prastowo (2006) using ANN (Artificial Neural Network) in predicting remaining useful lifetime of a machine, but the error that occurred is too high. So, it needs a method which is expected to have better performance.
In this paper, will be conducted the remaining useful lifetime prediction of a rotating machinery using ANFIS (Adaptive Neuro-Fuzzy Inference Systems) method. Vibration data taken using the vibration sensor at a certain time span will be used to predict the performance degradation of a machine condition. Vibration data is to be used for training data and testing on ANFIS. Triangular, trapezoidal and bell type membership function will be compared in the process of training and testing using backpropagation and hybrid learning system. Effect of addition in number of membership functions will also be seen in the process.
ANFIS with the hybrid learning system produces an average error better than backpropagation. Testing with the testing data showed that the ANFIS is able to predicts its remaining useful lifetime. Testing errors when using triangular type membership function is 0.002. Effect of the addition of two membership functions in the hybrid learning system is error will increase while the backpropagation will decrease it.
Keywords : Rotating Machinery, Prognostic, Remaining Useful Lifetime, Vibration monitoring, Anfis
KATA PENGANTAR
Segala puji hanya milik Allah. Kita memuji, memohon pertolongan dan ampunan-Nya, bertaubat dan berlindung kepada- Nya dari kejahatan diri dan keburukan amal perbuatan kita.
Barangsiapa yang diberi petunjuk oleh Allah maka tiada yang dapat menyesatkannya dan barangsiapa yang disesatkan oleh-Nya maka tiada yang dapat menunjukinya. Saya bersaksi bahwa tiada Tuhan yang berhak disembah kecuali Allah, tiada sekutu bagi- Nya. Dan saya bersaksi bahwa Muhammad adalah hamba dan utusan-Nya. Semoga shalawat dan salam tetap tercurah atas beliau, seluruh keluarga, para sahabat dan para pengikutnya yang setia sampai akhir zaman.
Puji syukur penulis panjatkan kehadirat Allah Subhanahu wa Ta’Ala karena berkat rahmat-Nyalah penulis dapat menyelesaikan tugas akhir yang berjudul “Prediksi Sisa Umur Pada Rotating Machinery Dengan Metode ANFIS (Adaptive Neuro-Fuzzy Inference Systems)”. Tugas akhir ini disusun sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknik di Institut Teknologi Sepuluh Nopember, Surabaya. Pada kesempatan ini, penulis ingin menyampaikan rasa terima kasih kepada:
1. Ibu, bapak serta kakak-kakak yang selalu memberikan doa dan dukungannya.
2. Bapak Dr. Muh. Nur Yuniarto selaku dosen pembimbing tugas akhir yang telah yang secara tidak langsung mengajarkan arti pentingnya sebuah kerja keras, tanggung jawab, dan konsekuensi.
3. Bapak Ir. Bambang Pramujati, M.Sc.Eng., Ph.D., Bapak Ir.
Witantyo, M.Eng.Sc., dan Bapak Ir. Sudiyono Kromodihardjo, M.Sc. Ph.D selaku tim penguji tugas akhir yang telah banyak memberikan masukan kepada penulis sehingga tugas akhir ini menjadi lebih sempurna.
4. Semua dosen Jurusan Teknik Mesin FTI ITS, yang telah memberikan ilmu pengetahuannya, semoga Allah membalas jasa dan budi baikmu.
5. Rekan-rekan satu angkatan, M49, yang telah banyak mengukir prestasi di tingkat lokal, nasional, maupun internasional. Saya sangat bangga menjadi bagian dari angkatan ini.
6. Rekan-rekan Manufacture Study Club: Purna, Yani, Dede, Ariawan, Andra, Izul, Prita, Niken, Intan, Linna, Edo, Andra, Niga, dan semuanya.
7. Tim sukses : Titin, Niken, Fani,Oke’dkk. Tanpa kalian saya bukan apa-apa. Hahahah..
8. Keluarga Mahasiswa Mesin, Himpunan Mahasiswa Mesin, klub pers Dimensi, M*ITS Autosport, Mesin Music Club, Lembaga Bengkel Mahasiswa Mesin, Lembaga Dakwah Ash- shaff. Tempat saya ”belajar” tentang organisasi dan kekeluargaan.
Akhir kata, salah dan khilaf adalah fitrah manusia. Penulis menyadari bahwa tugas akhir ini masih memiliki banyak kekurangan. Oleh karena itu, kritik dan saran sangat penulis harapkan demi kesempurnaan tugas akhir ini. Akhir kata, semoga laporan tugas akhir ini dapat bermanfaat untuk kita semua.
DAFTAR ISI
HALAMAN JUDUL i
LEMBAR PENGESAHAN v
ABSTRAK vii
KATA PENGANTAR xi
DAFTAR ISI xiii
DAFTAR GAMBAR xv
DAFTAR TABEL xviii
BAB I PENDAHULUAN 1
1.1 Latar Belakang 1
1.2 Perumusan Masalah 4
1.3 Tujuan Penelitian 4
1.4 Manfaat Penelitian 5
1.5 Batasan Masalah 5
BAB II TINJAUAN PUSTAKA 7
2.1 Kegagalan 7
2.2 Analisa Getaran 8
2.3 Penelitian-penelitian Terdahulu Tentang
Analisa getaran Pada Rotating Machinery 8 2.4 ANFIS (Adaptive Neuro-Fuzzy Inference
Systems) 16
2.4.1 Struktur ANFIS 16
2.4.2 Proses Pembelajaran Pada ANFIS 19
BAB III METODOLOGI PENELITIAN 21
3.1 Diagram Alir Penelitian 21
3.2 Studi Pustaka 22
3.3 Perumusan Masalah 23
3.4 Mengumpulkan Data Sekunder 23
3.5 Proses FFT dengan Software Matlab 23
3.6 Preprocessing Jaringan 23
3.7 Penyusunan FIS dan Set Input Membership 23 Function
3.8 Input Data Training ke ANFIS 23
3.9 Testing ANFIS 24
3.10 Eksperimen Validasi/Checking ANFIS 24
3.11 Analisa Pembahasan 24
3.12 Kesimpulan dan Saran 24
BAB IV PERMODELAN ANFIS 27
4.1 Data yang Digunakan 27
4.2 Analisa Data yang Digunakan 34 4.3 Struktur dan Permodelan ANFIS 42
4.3.1 Fuzzifikasi dan Set Membership
Function untuk Penentuan Sisa Umur 43 4.3.2 Rule Evaluation Fuzzifikasi Untuk
Penentuan Sisa Umur 44
BAB V TRAINING DAN VALIDASI ANFIS 51
5.1 Input Data Training 51
5.2 Testing ANFIS 64
5.3 Perbandingan Performa Prediksi
Menggunakan ANFIS dan JST 73
BAB VI PENUTUP 75
6.1 Kesimpulan 75
6.2 Saran 76
DAFTAR PUSTAKA 77
LAMPIRAN-LAMPIRAN 79
DAFTAR GAMBAR
Halaman
Gambar 2.1 Gambar 2.2(a) Gambar 2.2(b) Gambar 2.3 Gambar 2.4 Gambar 2.5 Gambar 2.6 Gambar 2.7 Gambar 2.8 Gambar 2.9
Gambar 3.1 Gambar 4.1 Gambar 4.2 Gambar 4.3 Gambar 4.4 Gambar 4.5 Gambar 4.6(a) Gambar 4.6(b) Gambar4.6(c)
Kurva Potential Failure to Failure (Moubray,1997)
Data Getaran Time Domain (Roky,2006)
Data Getaran Frequency Domain (Roky,2006)
Hasil Program Analisa Sinyal Menggunakan FFT (Roky,2006) Contoh Spektrum Getaran (Lee,2004) Performance Degradation (Lee,2004) Program Prediksi Sisa Umur Menggunakan JST (Prastowo,2006) Diagram Penelitian Tentang Analisa Getaran Pada Rotating Machinery Arsitektur ANFIS orde I (Jang,1997) Proses Pembelajaran Hibrid Pada ANFIS
Diagram Alir Penelitian Sistem Cooling Waterpump 2A Spektrum MIBV
Spektrum MIBV Gabungan Histogram Peak MIBV
Sinyal Spektrum Misalignment (Girdhar,2004)
Angular Misalignment Parallel Misalignment
Combination Angular and Parallel Misalignment
7 9 9 10 12 13 14 15 17 19
21 27 28 32 33 35 35 36 36
Gambar 4.7 Gambar 4.8 Gambar 4.9 Gambar 4.10 Gambar 4.11 Gambar 4.12 Gambar 4.13 Gambar 4.14 Gambar 4.15 Gambar 4.16 Gambar 4.17 Gambar 5.1 Gambar 5.2(a) Gambar 5.2(b) Gambar 5.2(c) Gambar 5.3(a) Gambar 5.3(b) Gambar 5.3(c) Gambar 5.4
Gambar 5.5
Efek Misalignment pada Poros Kopling
Dimensi pada bearing
Flowchart permodelan ANFIS
Fuzzifikasi dan Membership Function untuk power spektrum
Fuzzifikasi dan Membership Function untuk frekuensi
Rule penentuan sisa umur Program ANFIS GUI
Setting parameter untuk grid partisi pada anfis
Training data pada ANFIS Struktur ANFIS
Surface Viewer
Hubungan iput-output pada struktur ANFIS
Hybrid training ANFIS dengan membership function trimf
Hybrid training ANFIS dengan membership function gbell
Hybrid training ANFIS dengan membership function trapmf
Backpropagation training ANFIS dengan membership function trimf Backpropagation training ANFIS dengan membership function gbell Backpropagation training ANFIS dengan membership function trapmf Pengaruh penambahan 2 buah MF dalam proses training data menggunakan sistem pembelajaran hybrid
Pengaruh penambahan 2 buah MF 37 39 42 43 44 45 46 47 48 49 49 51 52 53 53 56 56 57 62
63
Gambar 5.6 Gambar 5.7
dalam proses training data menggunakan sistem pembelajaran hybrid
Testing pada hybrid ANFIS dengan membership function trapmf
Testing pada backpropagation ANFIS dengan membership function trapmf
64 65
[Halaman ini sengaja dikosongkan]
DAFTAR TABEL & GRAFIK
Halaman Tabel 2.1
Tabel 2.2
Tabel 2.3
Tabel 2.4
Tabel 4.1 Tabel 5.1 Tabel 5.2
Tabel 5.3 Table 5.4
Tabel 5.5 Tabel 5.6
Gejala-gejala Kegagalan Yang Timbul Pada Pompa (Beebe,2004) Validasi Data Independen
Menggunakan Sistem Hibrid (Abet,2009)
Perbandingan kinerja Antara Sistem Fuzzy Dengan Jaringan Syaraf tiruan (Dewi,2006)
Proses Pembelajaran Hibrid pada ANFIS (Jang,1997)
Penamaan Sinyal Testing
Training data menggunakan sistem pembelajaran hybrid(34 MF)
Training data menggunakan sistem pembelajaran backpropagation (34 MF)
Training data menggunakan sistem pembelajaran hybrid (56 MF)
Training data menggunakan sistem pembelajaran backpropagation (56 MF)
Testing data pada hybrid anfis (3 4 MF)
Perbandingan performa prediksi
8 11
16
19
34 54 57
59 60
66 68
[Halaman ini sengaja dikosongkan]
BAB I PENDAHULUAN
1.1 Latar Belakang
Rotating machinery memegang peranan penting pada proses produksi berbagai industri di dunia. Kondisi komponen- komponen mesin ini sangat menjadi perhatian khusus oleh pihak perusahaan, karena jika terjadi kerusakan dapat mengakibatkan turunnya produktifitas. Oleh sebab itu sangat penting untuk melakukan diagnosa dan prognosa kerusakan pada sebuah rotating machinery sebelum kerusakan terjadi, sehingga bisa direncanakan metode dan waktu pelaksanaan maintenance yang lebih tepat.
Prognosa adalah suatu proses penting dalam reliability, availability, maintainability dan safety suatu mesin. Tujuan utama dari sistem prognosa adalah untuk mengestimasikan sisa umur pakai (remaining useful life) dari sebuah mesin yang berguna untuk mengetahui sisa waktu sebelum terjadi kegagalan pada mesin tersebut (Jardin,2006).
Ada berbagai metode yang dapat digunakan untuk mengukur kondisi mesin, seperti vibration analysis, oil analysis, temperature measurement, pressure measurement, flow rate measurement, dan lain-lain. Pengukuran vibrasi mesin adalah salah satu metode yang cukup baik untuk mengetahui kondisi mesin karena getaran merupakan indikator kondisi mekanikal dan indikator awal dari adanya cacat (defect) pada suatu mesin secara keseluruhan. Semakin tinggi getaran yang terjadi mengindikasikan penurunan kondisi dari mesin tersebut.
Produktifitas juga tidak akan menurun karena mesin tetap beroperasi ketika dilakukan pengambilan data getaran. Dari hasil pengukuran vibrasi secara rutin akan didapatkan data vibrasi berupa time domain, yang selanjutnya akan dirubah menjadi frekuensi domain.
Dalam kondisi aktualnya, kerusakan yang terjadi pada sebuah mesin sangatlah kompleks, sehingga sangat sulit untuk mencari model matematik dari sebuah mesin yang dapat digunakan sebagai parameter dalam melakukan diagnosa dan prognosa kerusakan. Selain itu hubungan antara kerusakan dan gejala kerusakan terkadang juga terlalu kompleks. Sehingga hasil dari diagnosa mengandung ketidakpastian (fuzzines) yang cukup tinggi (Ping Yang dan Sui – sheng Liu, 2005). Metode artificial intelligent gabungan antara fuzzy logic dengan neural network (JST) atau yang lebih dikenal dengan istilah ANFIS (Adaptive Neuro-Fuzzy Inference System) banyak sekali diaplikasikan untuk mengatasi permasalahan diatas. Fuzzy logic memiliki kelebihan dalam memodelkan aspek kualitatif dari pengetahuan manusia dan proses pengambilan keputusan dengan menerapkan basis aturan (rules). Sedangkan Jaringan syaraf tiruan (JST) memiliki kelebihan dalam mengenali pola, belajar dan berlatih dalam menyelesaikan suatu permasalahan tanpa memerlukan permodelan matematik. Selain itu jaringan syaraf tiruan dapat bekerja berdasarkan data historis yang diinputkan kepadanya dan dapat memprediksi kejadian yang akan datang berdasarkan data- data tersebut.
Penelitian mengenai analisa vibrasi pada rotating machinery sudah banyak dilakukan. Mas’udi (2009) melakukan penelitian tentang diagnosa kerusakan pada rotating machinery menggunakan JST (Jaringan Syaraf Tiruan). Dengan melakukan eksperimen, Mas’udi memvariasikan beberapa jenis kerusakan seperti misalignment, unbalance, bad bearing, bad gear serta kombinasinya yang akan digunakan sebagai data training untuk JST agar dapat mendiagnosa kerusakan secara otomatis.
Kemampuan JST dalam mendiagnosa/mengenali jenis-jenis kerusakan yang terjadi sangat dipengaruhi oleh banyaknya data training. Oleh sebab itu, semakin banyak sinyal yang ditraining akan semakin bagus. Namun disisi lain, jaringan syaraf tiruan memiliki kelemahan. Yaitu masih membutuhkan waktu yang relatif cukup lama dan sering mengalami keterlambatan dalam
mengidentifikasi dan mendiagnosa kerusakan yang terjadi pada sebuah sistem yang kompleks (Ping Yang dan Sui – sheng Liu, 2005). JST yang disusun oleh Mas’udi mampu mengidentifikasi kerusakan dengan tingkat toleransi error 10-7. Akan tetapi performa dalam mengidentifikasi kerusakan ini dirasa masih perlu ditingkatkan untuk mendapatkan suatu sistem prediksi yang lebih handal.
Kemudian Abet (2009) melakukan pengembangan penelitian dengan menggunakan data yang sama seperti Mas’udi. Metode yang digunakan oleh Abet adalah ANFIS (Adaptive Neuro-Fuzzy Inference Systems) dimana metode ini adalah gabungan dari sistem fuzzy logic dan JST. Dari perbandingan kedua penelitian yang dilakukan, didapat kesimpulan bahwa performa ANFIS lebih baik dibanding JST dalam mendiagnosa kerusakan. Hal ini dikarenakan kelebihan ANFIS yang mempunyai metode pembelajaran hybrid, yaitu pembelajaran arah maju (forward pass) dengan menggunakan metode Galat Kuadrat Terkecil (Recursive Least Square Estimator) atau sering disebut RLSE dan pembelajaran arah mundur (backward pass) yang menggunakan metode turunan (gradient descent) atau yang lebih dikenal dengan istilah backpropagation. Pada arah maju, parameter premis dibuat tetap. Dengan menggunakan metode RLSE, parameter konsekuen diperbaiki berdasarkan pasangan data masukan-keluaran. Metode RLSE dapat diterapkan karena parameter konsekuen yang diperbaiki adalah parameter linier. Metode RLSE akan mempercepat proses belajar. Setelah parameter konsekuen didapat, masukan dilewatkan jaringan adaptif kembali dan hasil keluaran jaringan adaptif ini dibandingkan dengan keluaran sebenarnya. Pada arah mundur, parameter konsekuen dibuat tetap.
Kesalahan (error) yang terjadi antara keluaran jaringan adaptif dan keluaran sebenarnya dipropagasikan mundur dengan menggunakan gradient descent untuk memperbaiki parameter premis.
Prastowo (2006) melakukan penelitian tentang prediksi sisa umur pakai mesin Cooling Waterpump 2A PT. PJB UP. Gresik
dengan menggunakan metode JST (Jaringan Syaraf Tiruan). Dari hasil plot frekuensi domain oleh FFT dari sinyal learning waveform MIBV(Motor Inboard Vertical) diketahui bahwa Jaringan syaraf tiruan yang disusun Prastowo mampu memprediksi sisa umur pakai dengan tingkat toleransi error 10-7. Penelitian Prastowo masih perlu dikembangkan, dimana performa dalam memprediksi sisa umur pakai dirasa penting untuk ditingkatkan. Untuk itu, dalam penelitian ini akan dilakukan sebuah pengembangan ANFIS menggunakan input getaran untuk melakukan prediksi sisa umur pakai dari rotating machinery.
1.2 Perumusan Masalah
Dari uraian diatas, maka dapat diambil perumusan masalah untuk dalam penelitian ini adalah :
1. Bagaimana menyusun struktur ANFIS (Adaptive Neuro - Fuzzy inference system) yang dapat digunakan untuk memprediksi sisa umur pakai efektif dari sebuah rotating machinery berdasarkan data sekunder berupa data getaran.
2. Bagaimana memvalidasi output ANFIS yang telah disusun sehingga dapat menjamin kemampuan dari metode tersebut.
3. Bagaimana perbandingan performa prediksi sisa umur menggunakan ANFIS dengan JST.
1.3 Tujuan Penelitian Tujuan Penelitian ini adalah :
1. Membuat sistem prognosa otomatis yang mampu memprediksi sisa umur efektif dari komponen mekanikal menggunakan ANFIS (Adaptive Fuzzy Neuro-inference system).
2. Menguji tingkat validasi output ANFIS (Adaptive Fuzzy Neuro-inference system) yang telah disusun sehingga dapat menjamin kemampuan dari metode tersebut.
3. Membandingkan sistem hybrid ANFIS dengan sistem backpropagation dalam memprediksi sisa umur.
4. Membandingkan pengaruh penggunaan tipe membership funcion trimpf (segitiga), gbell (lonceng) dan trapezoidal dalam memprediksi sisa umur.
5. Mengembangkan penelitian tentang aplikasi artifical intelligance dalam bidang maintenace, khususnya untuk condition monitoring via vibrasi.
1.4 Manfaat Penelitian
Manfaat dari penelitian ini adalah :
1.
Mampu memprediksi sisa umur pakai efektif dari sebuah komponen mesin agar dapat disusun metode pemeliharaan yang tepat sehingga bisa meningkatkan kapasitas produksi dan mengurangi biaya perbaikan.2.
Mengurangi faktor subjektifitas manusia dalam penentuan keputusan mengenai sisa umur pakai sebuah mesin.1.5 Batasan Masalah
Batasan masalah dan asumsi yang digunakan untuk menganalisa antara lain:
1. Data yang digunakan adalah data sekunder dari lapangan pada sistem Cooling Waterpump 2A PT.PJB UP. Gresik.
2. Penyusunan ANFIS menggunakan software Matlab 7.1.
3. Penentuan sisa umur efektif berdasarkan hasil output ANFIS yang telah disusun.
“Halaman ini sengaja dikosongkan”
BAB II
TINJAUAN PUSTAKA
2.1 Kegagalan
Kegagalan/failure adalah ketidakmampuan dari suatu komponen, sub-sistem, atau sistem untuk melakukan fungsinya pada performansi standar menurut desainnya.
Kinerja standar dari suatu sistem, sub-sistem, peralatan atau komponen berkaitan dengan apa yang harus kita capai dan evaluasi kita terhadap kemampuan desain dan keandalan intrinsik dari sistem, sub-sistem, peralatan, atau komponen tersebut.
Dari hasil penelitian John Moubray, pada bukunya
yang berjudul “RCM II”, diketahui bahwa keandalan
(reliability) dari suatu komponen mesin akan turun seiring
dengan waktu operasi dari komponen mesin tersebut. Dari
kurva Potensial Failure to Failure (P-F) penelitian dari
Moubray dapat dilihat fenomena kerusakan yang terjadi
sepanjang fungsi interval waktu. Dari mulai awal terjadinya
kerusakan(titik P) sampai fungsi operasional dari peralatan
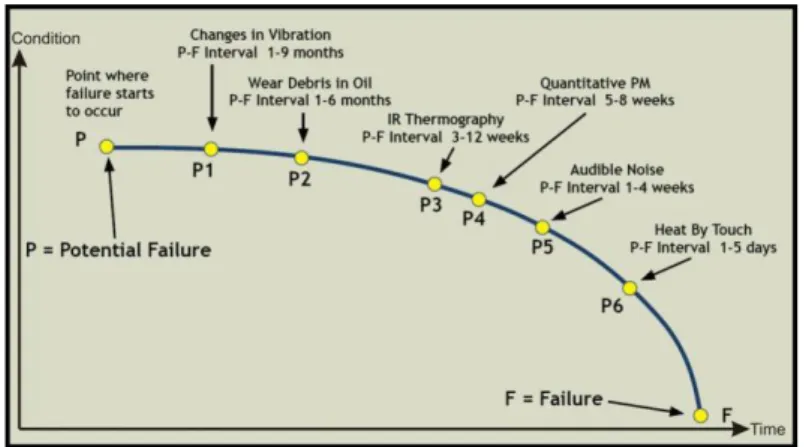
tersebut tidak berfungsi bisa diamati. Dari gambar 2.1
diketahui pula bahwa getaran mesin mengindikasikan
kerusakan sejak awal yaitu 9 bulan sebelum kerusakan
fungsional terjadi yaitu pada titik P1. Indikasi selanjutnya
yang muncul seperti adanya geram pada pelumas,
kebisingan, lalu overheating.
Gambar 2.1 Kurva Potential Failure to Failure (Moubray, 1997)
2.2 Analisa Getaran
Vibration analysis adalah metode yang paling sering digunakan dalam condition monitoring pada berbagai rotating machinery terutama pompa (Beebe,2004). Hal ini dikarenakan getaran merupakan indikator kondisi mekanikal yang baik dan indikator awal dari adanya cacat (defect) pada suatu mesin secara keseluruhan. Hal ini ditunjukkan dalam tabel berikut.
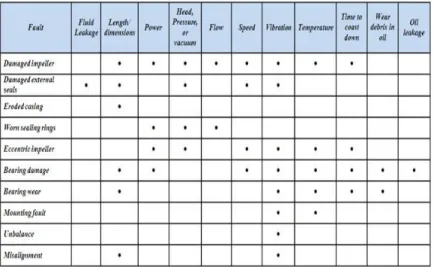
Tabel 2.1 Gejala-gejala kegagalan yang timbul pada pompa
(Beebe, 2004)
Tabel 2.1 diatas adalah tabel dari berbagai macam kegagalan pada pompa dan gejala-gejala yang yang ditimbulkannya. Dari tabel tersebut bisa dilihat bahwa getaran menjadi indikator untuk mayoritas kegagalan pada pompa. Hal ini menunjukan bahwa getaran merupakan indikator kondisi mekanikal yang paling baik untuk mendiagnosa kegagalan.
2.3 Penelitian-Penelitian Terdahulu Tentang Analisa Getaran Pada Rotating Machinery
Roky (2006) melakukan penelitian tentang diagnosa
kegagalan pada mesin cooling waterpump 2A PT. PJB UP
Gresik menggunakan metode analisa getaran. Dari hasil
pengukuran getaran pada pompa didapatkan data getaran
dalam basis time domain. Data getaran time domain adalah
adalah gabungan dari banyak sekali sinyal getaran pada
suatu waktu tertentu, dimana setiap sinyal getaran pada
grafik waveform mempunyai fungsi matematis sendiri-
sendiri. Data ini belum bisa digunakan untuk mencari jenis kerusakan yang terjadi beserta penyebabnya. Oleh karena itu Roky meneliti bagaimana caranya data getaran dari time domain tersebut dirubah ke basis frekuensi domain untuk mencari jenis kerusakan yang terjadi. Dalam hal ini Roky menggunakan metode Fast Fourier Transform (FFT).
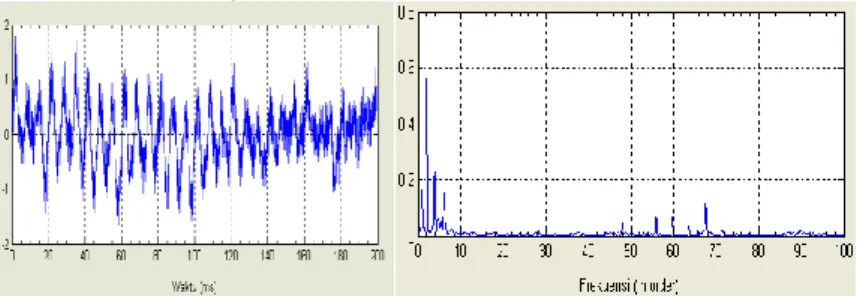
Gambar 2.2 mengilustrasikan perbedaan antara data getaran time domain dengan frekuensi domain.
(a) (b)
Gambar 2.2 (a) Data getaran time domain , (b) Data getaran frequency domain (spektrum) (Roky,2006)
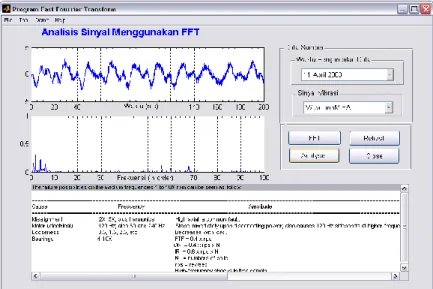
FFT adalah suatu algoritma, dimana dapat membedakan frekuensi-frekuensi getaran/vibrasi pada suatu mesin yang sedang beroperasi. Dengan proses FFT yang terdapat pada software Matlab, maka akan dihasilkan grafik spectrum yang menunjukan besarnya amplitudo pada setiap frekuensi. Outputan FFT dibandingkan dengan tabel karakteristik getaran untuk mencari jenis kerusakan dan kemungkinan penyebabnya.
Hasil ini membutuhkan kemampuan dan
pengalaman yang cukup banyak dari analisatornya. Selain
itu, hasil analisanya sangat subyektif oleh faktor manusia
yang menganalisa dan waktu yang dibutuhkan juga relatif
lama. Hasil akhir penelitian dari Roky dapat dilihat pada gambar 2.3 dibawah.
Gambar 2.3 Hasil program analisa sinyal menggunakan FFT (Roky, 2006)
Abet (2009) melakukan penelitian tentang diagnosa
kerusakan pada rotating machinery menggunakan ANFIS
(Adaptive Neuro Fuzzy Inference Systems). Dengan
melakukan eksperimen, Abet Mardani memvariasikan
beberapa jenis kerusakan seperti misalignment, unbalance,
bad bearing, bad gear serta kombinasinya yang akan
digunakan sebagai data training untuk ANFIS agar dapat
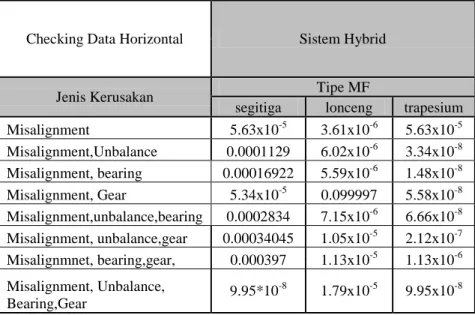
mendiagnosa kerusakan secara otomatis. Dari simulasi
menggunakan ANFIS toolbox menggunakan sistem hybrid,
didapatkan data sebagai berikut :
Tabel 2.2 Validasi data independent menggunakan sistem hybrid (Abet,2009)
Checking Data Horizontal Sistem Hybrid
Jenis Kerusakan Tipe MF
segitiga lonceng trapesium Misalignment 5.63x10-5 3.61x10-6 5.63x10-5 Misalignment,Unbalance 0.0001129 6.02x10-6 3.34x10-8 Misalignment, bearing 0.00016922 5.59x10-6 1.48x10-8 Misalignment, Gear 5.34x10-5 0.099997 5.58x10-8 Misalignment,unbalance,bearing 0.0002834 7.15x10-6 6.66x10-8 Misalignment, unbalance,gear 0.00034045 1.05x10-5 2.12x10-7 Misalignmnet, bearing,gear, 0.000397 1.13x10-5 1.13x10-6 Misalignment, Unbalance,
Bearing,Gear 9.95*10-8 1.79x10-5 9.95x10-8
Dari data diatas dapat diketahui bahwa error terkecil
didapatkan pada menggunakan tipe fungsi keanggotaan
trapezoidal. Dan nilai error terkecil didapakan pada saat
sinyal kerusakan misalignment, unbalance, bearing, dan
gear. Hal ini ditunjukkan dengan nilai error yang paling
kecil pada 2 tipe fungsi keanggotaan. Yaitu pada tipe trimpf
(segitiga) sebesar 9.9596*10
-8dan tipe trapezoidal sebesar
9.9598*10
-8. Dari data diatas dapat diketahui bahwa error
hasil checking menggunakan data struktur ANFIS hasil
pengukuran vertikal hampir semuanya mendeteksi sinyal
yang diinputkan sebagai data kerusakan. Hal ini ditunjukkan
dengan average checking error yang lebih kecil dari nilai toleransi error yang telah ditentukan yaitu 10
-6.
Sisa umur pakai pada suatu komponen mesin adalah rentang waktu dari kondisi saat ini hingga komponen tersebut mengalami kegagalan. Untuk menentukan sisa umur pakai biasanya dilakukan monitoring pada kondisi mesin. Degradasi unjuk kerja suatu mesin pada umumnya dapat terlihat sebelum terjadinya kegagalan. Dengan memonitor tren dari degradasi unjuk kerja suatu mesin maka akan dapat direncanakan suatu tindakan yang tepat sebelum terjadinya kegagalan. Monitoring tren dari degradasi unjuk kerja memerlukan adanya proses learning/training dan pengenalan pola (pattern recognition).
Cohen (1995) memprediksikan unjuk kerja dari sebuah gearbox dari sebuah material handling system.
Dimana dengan menempatkan sensor getaran akan dapat diketahui unjuk kerja dari gearbox tersebut. Dari data getaran yang didapat kemudian diproses sehingga akan diketahui degradasi unjuk kerja dari gearbox tersebut.
Gambar dari data getaran dapat diilustrasikan pada gambar
2.4. berikut
Gambar 2.4 Contoh Spektrum Getaran (Lee et al, 2004) Gambar 2.4 diatas adalah contoh data getaran berbasis waktu (waveform) dari tiga sumbu (vertikal, horizontal dan aksial) pada bantalan spindel sebuah mesin CNC. Salah satu metode yang dapat digunakan untuk memproses data getaran untuk dapat memprediksi sisa umur pakai dari suatu mesin atau time series prediction adalah dengan membuat jaringan syaraf. Dari susunan jaringan syaraf tiruan tersebut diharapkan akan dapat diketahui degradasi unjuk kerja dari suatu mesin. Hal tersebut dapat diilustrasikan pada gambar 2.5.
Gambar 2.5 Performance Degradation (Lee et al., 2004) Pada gambar diatas, semakin besar confidence value (CV) menunjukkan bahwa mesin akan semakin sering mengalami kegagalan (failure) dan sebaliknya.
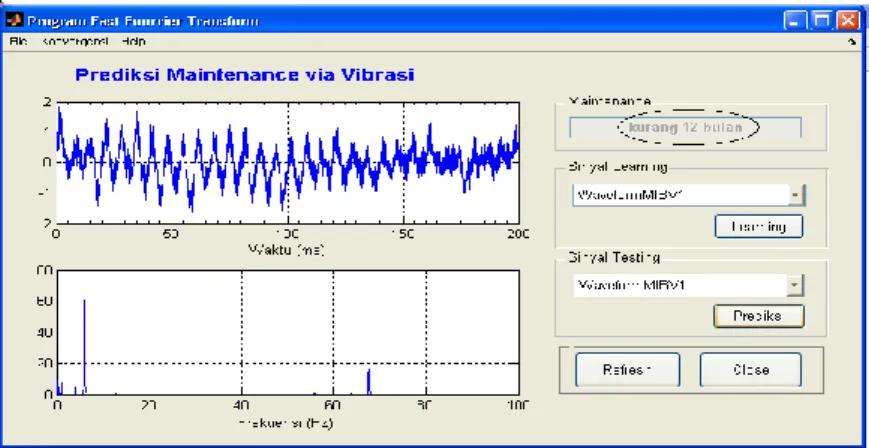
Prastowo (2006) untuk melakukan penelitian tentang prediksi sisa umur pakai mesin Cooling Waterpump 2A PT.
PJB UP. Gresik dengan metode jaringan saraf tiruan.
Metode jaringan syaraf tiruan (JST) ini memiliki kelebihan
dalam mengenali, belajar, dan berlatih dalam menyelesaikan suatu permasalahan tanpa memerlukan pemodelan matematik sehingga dapat mereduksi asumsi-asumsi matematik seperti asumsi linearitas atau asumsi matematik lainnya. Dalam proses belajarnya, sinyal-sinyal dari jaringan pada Feed-forward Backpropagation Neural Network tidak hanya bergerak menuju ke satu arah akan tetapi dapat juga berbalik arah yang nantinya dapat digunakan sebagai feedback dari output yang diperoleh. Berikut hasil akhir penelitian dari Prastowo.
Gambar 2.6 Hasil program prediksi sisa umur menggunakan JST (Prastowo,2006)
Dari hasil plot frekuensi domain oleh FFT dari sinyal learning waveform MIBV(Motor Inboard Vertical) diketahui bahwa Jaringan saraf tiruan yang disusun Anugrah prastowo mampu memprediksi sisa umur pakai, yaitu dengan hasil akhir ”Maintenance kurang 12 bulan”.
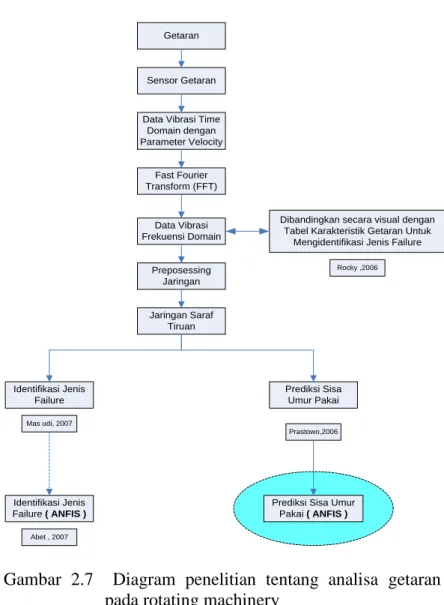
Dari rangkaian penelitian yang sudah dilakukan
diatas, diagram penelitiannya dapat dilihat pada gambar 2.7.
Getaran
Sensor Getaran
Data Vibrasi Time Domain dengan Parameter Velocity
Fast Fourier Transform (FFT)
Data Vibrasi Frekuensi Domain
Preposessing Jaringan
Jaringan Saraf Tiruan
Identifikasi Jenis Failure
Prediksi Sisa Umur Pakai
Mas udi, 2007
Prastowo,2006
Dibandingkan secara visual dengan Tabel Karakteristik Getaran Untuk
Mengidentifikasi Jenis Failure Rocky ,2006
Identifikasi Jenis Failure ( ANFIS )
Abet , 2007
Prediksi Sisa Umur Pakai ( ANFIS )
Gambar 2.7 Diagram penelitian tentang analisa getaran pada rotating machinery
Dari penelitian-penelitian sebelumnya dapat
diketahui bahwa jaringan syaraf tiruan dapat digunakan
untuk melakukan diagnosa dan prediksi sisa umur pada
suatu komponen mesin secara otomatis. Metode ANFIS juga dapat digunakan untuk melakukan diagnosa kerusakan dengan performa yang lebih baik dibanding jaringan syaraf tiruan.
2.4 ANFIS (Adaptive Neuro-Fuzzy Inference System)
ANFIS adalah gabungan dari dua sistem yaitu sistem logika fuzzy dan jaringan syaraf tiruan. Sistem ANFIS berdasar pada sistem inferensi fuzzy yang dilatih menggunakan algoritma pembelajaran yang diturunkan dari sistem jaringan syaraf tiruan.
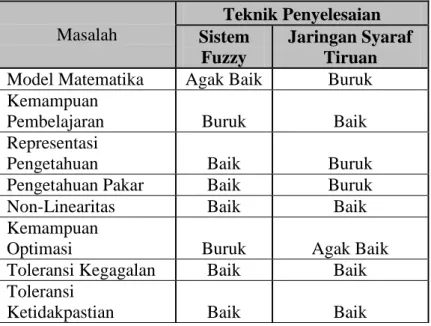
Berikut ditunjukkan perbandingan kinerja antara sistem fuzzy dengan jaringan saraf tiruan:
Tabel 2.3 Perbandingan kinerja antara sistem fuzzy dengan jaringan syaraf tiruan (Dewi,2006)
Masalah
Teknik Penyelesaian Sistem
Fuzzy
Jaringan Syaraf Tiruan Model Matematika Agak Baik Buruk Kemampuan
Pembelajaran Buruk Baik
Representasi
Pengetahuan Baik Buruk
Pengetahuan Pakar Baik Buruk
Non-Linearitas Baik Baik
Kemampuan
Optimasi Buruk Agak Baik
Toleransi Kegagalan Baik Baik Toleransi
Ketidakpastian Baik Baik
Operasi Waktu Nyata Baik Agak Baik
Dengan demikian sistem ANFIS memiliki semua kelebihan yang dimiliki oleh sistem inferensi fuzzy dan jaringan syaraf tiruan.2.4.1 Struktur ANFIS
Struktur ANFIS orde I ditunjukkan dalam gambar 2.14.
Pada gambar tersebut terdapat 5 lapisan dengan fungsi yang berbeda untuk tiap lapisannya. Lambang kotak menyatakan simpul adaptif, artinya nilai parameternya bisa berubah dengan pembelajaran. Sedangkan lambang lingkaran menyatakan simpul non adaptif yang nilainya tetap.
Gambar 2.8 Arsitektur ANFIS orde I (Jang, 1997)
Berikut penjelasan tentang lapisan-lapisan yang terdapat dalam struktur ANFIS :
1. Lapisan 1
Semua simpul pada lapisan ini adalah simpul adaptif
(parameter dapat berubah) dengan fungsi simpul :
untuk i = 1,2, atau untuk I = 3,4 Dengan x dan y adalah masukan pada simpul i.
A
1-2dan B
1-2adalah fungsi keanggotaan masing-masing simpul. Simpul O
1,iberfungsi menyatakan derajat keanggotaan tiap masukan terhadap himpunan fuzzy A dan B.
2. Lapisan 2
Semua simpul pada lapisan ini adalah non adaptif (parameter tetap). Fungsi simpul ini adalah mengalikan setiap sinyal masukan yang akan datang. Fungsi simpul :
Tiap keluaran simpul menyatakan derajat pengaktifan (firing strength) tiap aturan fuzzy. Banyaknya simpul pada lapisan ini menunjukkan banyaknya aturan yang dibentuk. Fungsi perkalian yang digunakan adalah interpretasi opaerator AND.
3. Lapisan 3
Setiap simpul dalam lapisan lapisan ini adalah simpul non adaptif yang menampilkan fungsi derajat pengaktifan ternormalisasi (normalized Firing Strength) yaitu rasio keluaran simpul ke-I pada lapisan sebelumnya, dengan bentuk simpul :
Apabila dibentuk lebih dari 2 aturan, fungsi dapat diperluas
dengan membagi dengan jumlah total W untuk semua
aturan.
4. Lapisan 4
Setiap simpul pada lapisan ini adalah simpul adaptif dengan fungsi simpul :
Dengan W
iadalah derajat pengaktifan ternormalisasi dari lapisan 3 dan parameter p, q, r menyatakan parameter konsekuen yang adaptif.
5. Lapisan 5
Fungsi lapisan ini adalah untuk menjumlahkan semua masukan. Fungsi simpul :
Jaringan adaptif dengan lima lapisan diatas ekivalen dengan sistem inferensi fuzzy Takagi-Sugeno-Kang ( TSK ) atau yang lebih dikenal dengan sugeno.
2.4.2 Proses Pembelajaran Pada ANFIS
ANFIS mempergunakan algoritma belajar hibrida, yaitu menggabungkan metode Least-squares estimator (LSE) dan error backpropagation (EBP). Dalam struktur ANFIS metode EBP dilakukan pada lapisan 1, sedangkan metode LSE dilakukan di lapisan 4.
Gambar 2.9 Proses pembelajaran hibrid pada ANFIS (Jang, 1997)
Pada lapisan 1 parameternya merupakan parameter dari fungsi keanggotaan himpunan fuzzy sifatnya nonlinear terhadap keluaran sistem. Prosess belajar pada parameter ini menggunakan metode EBP untuk memperbaharui nilai parameternya. Sedangkan pada lapisan ke 4, parameter merupakan parameter linear terhadap keluaran sistem, yang menyusun basis kaidah fuzzy. Proses belajar untuk memperbaharui pada lapisan ini menggunakan metode LSE.
Proses belajar pada ANFIS dapat dilihat pada gambar 2.15 dan tabel 2.4.
Tabel 2.4. Proses pembelajaran hybrid pada ANFIS (Jang,
1997)
“Halaman ini sengaja dikosongkan”
BAB III
METODOLOGI PENELITIAN
3.1 Diagram Alir Penelitian
Metodologi penelitian digambarkan dalam flowchart gambar 3.1.
Studi Pustaka
Perumusan Masalah
Penyusunan FIS dan Set input Membership Function Mengumpulkan data sekunder
dari lapangan
Menginputkan data training ke ANFIS Proses FFT Matlab
Preprocessing Data Start
A
Error < RSME atau Iterasi Maksimum
YES NO
A
Testing Jaringan
Analisa dan Pembahasan - Analisa hasil performa prediksi ANFIS - Perbandingan hasil performa prediksi menggunakan ANFIS dengan JST
Kesimpulan dan Saran
Stop
Gambar 3.1 Diagram Alir Penelitian
3.2 Studi Pustaka
Pada tahap studi pustaka dilakukan kajian secara teoritis mengenai metode-metode yang dapat mendukung untuk penyelesaian permasalahan dalam penelitian ini. Studi pustaka yang digunakan dapat diperoleh dari buku, jurnal, internet atau penelitian sebelumnya. Tinjauan Pustaka memberikan pengetahuan mendasar bagi peneliti untuk meneliti obyek penelitian, sehubungan dengan itu maka dilakukan studi pustaka mengenai:
1. Prediksi sisa umur efektif pada sebuah mesin khususnya dengan input getaran.
2. Pengolahan sinyal digital dengan menggunakan Fast Fourier Transform.
3. Adaptive Neuro-Fuzzy Inference System (ANFIS) yaitu gabungan antara metode logika fuzzy dengan Jaringan Saraf Tiruan (JST)
3.3 Perumusan Masalah
Perumusan Masalah dalam penelitian ini adalah bagaimana melakukan prediksi sisa umur efektif mesin secara otomatis menggunakan Adaptive Neuro-Fuzzy Inference System (ANFIS) serta menguji tingkat validasi output jaringan yang telah disusun sehingga dapat menjamin kemampuan dari metode tersebut.
3.4 Mengumpulkam Data Sekunder
Data yang akan diolah adalah data sekunder yang diperoleh dari PT. PJB UP Gresik. Data tersebut berupa data getaran berbasis time-domain.
3.5 Proses FFT dengan software Matlab
Data sekunder yang diperoleh diplot menjadi grafik waveform. Untuk dapat dianalisa lebih lanjut, maka grafik waveform tersebut perlu diubah menjadi grafik spectrum. Untuk mengubah grafik waveform menjadi spectrum digunakan Transformasi Fourier (FFT) dengan bantuan software Matlab.
3.6 Preprocessing Jaringan
Pada tahap preprocessing jaringan ini dilakukan normalisasi data getaran yang diperoleh dari FFT agar dapat digunakan sebagai input dari anfis sebagai data training.
3.7 Penyusunan FIS dan Set input Membership Function Pada tahap ini akan dibuat model Fuzzy inference System (FIS) tipe Sugeno dengan menggunakan Matlab. Pembuatan model fuzzy sugeno meliputi pembuatan membership fuction, membangun rule-rule dan transformasi ke anfis.
3.8 Input Data Training ke Anfis
Data yang telah didapatkan kemudian digunakan sebagai input ANFIS sebagai data training dan testing. Pada proses training dilakukan pencarian bobot (weight) yang tepat dan
pemilihan fungsi aktifasi yang tepat. Parameter yang disetting dalam proses training anfis adalah jumlah iterasi yang diinginkan dan toleransi error yang diinginkan.
3.9 Validating Anfis
Hasil training dari Anfis dapat dievaluasi dengan eksperimen validasi. Eksperimen validasi dapat berupa testing pada jaringan yang telah ditraining sebelumnya. Dengan menentukan besar error tertentu maka akan diketahui apakah anfis yang telah disusun valid atau tidak. Jika error RMSE (Root Mean Square Error) maka anfis berhasil mengidentifikasi kerusakan komponen. Nilai RMSE merupakan ukuran performance untuk melihat kemampuan dari jaringan untuk menggeneralisasi informasi yanag didapatkan. Nilai RSME yang ditentukan adalah 10-6.
3.10 Testing Anfis
Setelah dilakukan eksperimen validasi, maka langkah selanjutnya adalah melakukan testing dengan menginputkan data baru terhadap anfis yang telah disusun. Pada tahap ini akan dapat diketahui apakah anfis yang telah disusun dapat digunakan untuk memprediksi sisa umur efektif dari suatu komponen mekanikal atau tidak.
3.11 Analisa Pembahasan
Setelah dilakukan eksperimen validasi dan testing, kemudian dilakukan analisa dan pembahasan dari hasil prediksi sisa umur efektif yang diperoleh dari output anfis. Selanjutnya performa hasil prediksi menggunakan ANFIS ini akan dibandingkan dengan JST hasil penelitian Prastowo.
3.12 Kesimpulan dan Saran
Dari hasi analisa data dan pembahasan yang dilakukan maka dapat diambil kesimpulan dan rekomendasi saran-saran
pengembangan dari penelitian ini akan diberikan demi kesempurnaan penelitian selanjutnya.
“Halaman ini sengaja dikosongkan”
BAB IV
PERMODELAN ANFIS
4.1 Data yang Digunakan
Dalam tugas akhir ini digunakan data sekunder. Data sekunder yang digunakan berupa data record getaran dari sistem Cooling Waterpump 2A yang terdiri atas motor, kopling dan pompa. Data sekunder yang diperoleh adalah data getaran berupa domain waktu (waveform) dan data domain frekuensi (spectrum).
Record data getaran tersebut diperoleh melalui pengambilan data tiap bulan pada sepuluh titik pengukuran yaitu:
1. MOH (Motor Outboard Horizontal) 2. MOV (Motor Outboard Vertikal) 3. MIH (Motor Inboard Horizontal) 4. MIV (Motor Inboard Vertikal) 5. MIA (Motor Inboard Aksial) 6. PIH (Pompa Inboard Horizontal) 7. PIV (Pompa Inboard Vertikal) 8. POH (Pompa Outboard Horizontal) 9. POV (Pompa Outboard Vertikal) 10. POA (Pompa Outboard Aksial)
Gambar 4.1 Sistem Cooling Waterpump 2A (PT. PJB, 2006)
Data yang akan digunakan untuk training jaringan adalah data MIBV (Motor Inboard Vertikal). Pemilihan ini didasarkan pada :
1. Adanya 12 data berurutan yang menunjukkan adanya tren yang semakin naik. Dimana hal tersebut mengindikasikan adanya gejala failure yang akan terjadi.
2. Dari keterangan yang diperoleh di lapangan diketahui bahwa komponen yang sering mengalami kerusakan adalah bantalan.
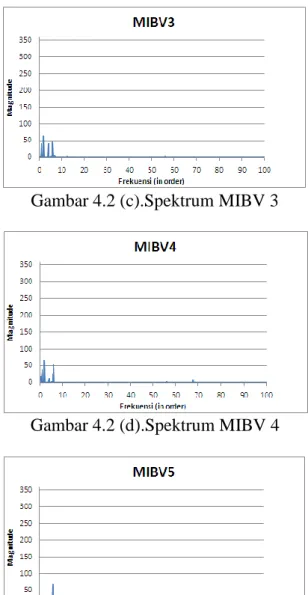
Adapun bentuk masing-masing spektrum dari MIBV ke-1 sampai 12 ditunjukan oleh gambar 4.2 dibawah ini :
Gambar 4.2 (a).Spektrum MIBV 1
Gambar 4.2 (b).Spektrum MIBV 2
Gambar 4.2 (c).Spektrum MIBV 3
Gambar 4.2 (d).Spektrum MIBV 4
Gambar 4.2 (e).Spektrum MIBV 5
Gambar 4.2 (f).Spektrum MIBV 6
Gambar 4.2 (g).Spektrum MIBV 7
Gambar 4.2 (h).Spektrum MIBV 8
Gambar 4.2 (i).Spektrum MIBV 9
\Gambar 4.2 (j).Spektrum MIBV10
Gambar 4.2 (k).Spektrum MIBV 11
Gambar 4.2 (l).Spektrum MIBV 12
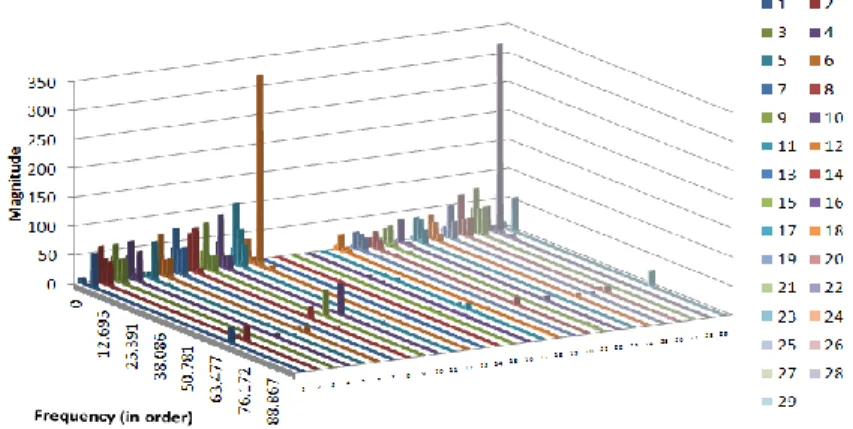
Gambar 4.3 Spektrum MIBV gabungan
Dari MIBV ke-1 sampai 29 yang ditunjukkan oleh gambar diatas, dapat dilihat bahwa adanya tren peak getaran yang semakin naik. Hal ini mengindikasikan terjadinya gejala failure dan penurunan kondisi pada mesin. Berikut adalah data MIBV lapangan yang diperoleh berupa 29 data spektrum getaran yang digambarkan sebagai histogram dari amplitudo dominannya.
Gambar 4.4 Histogram Peak MIBV
Setiap data spektrum memiliki 513 titik (titik sampel) dan data tersebut akan digunakan sebagai acuan untuk memprediksikan sisa umur pakai dari data-data getaran selanjutnya. Dari 29 data yang diperoleh tersebut dibagi menjadi dua yaitu :
1. Data training: sebagai data training akan digunakan data ke-1 sampai data ke-12.
2. Data testing: sebagai data testing akan digunakan data ke- 13 sampai data ke-29).
Pada proses training sinyal input tersebut (data spektrum) diberi nama dengan sisa umur pakai mesin sebagai berikut:
Tabel 4.1 Penamaan Sinyal Training
Sinyal MIBV yang pertama diberi nama kurang 12 bulan, kemudian sinyal kedua diberi nama kurang 11 bulan dan seterusnya. Dimana yang dimaksud adalah waktu untuk melakukan perawatan (sisa umur) kurang 12 bulan, 11 bulan, dan seterusnya. Setelah semua data di-training dengan ANFIS yang telah disusun dan telah dapat mencapai error jaringan yang telah ditentukan, maka langkah selanjutnya adalah melakukan validasi terhadap ANFIS yang telah disusun. Proses validasi ini dilakukan dengan melakukan testing dengan menggunakan data 1 tahun setelah dilakukan perawatan.
4.2 Analisa Data yang Digunakan
Dari tiap spektrum MIBV, sebagian besar menunjukan peak pada 2xRPM. Diagnosa dari sinyal spektrum pada pengukuran di titik MIBV adalah adanya indikasi misalignment pada poros yang menghubungkan pompa dan motor. Selain itu
apabila dilihat dari gambar contoh spektrum dibawah ini, kondisi diatas juga berarti ada indikasi misalignment.
Gambar 4.5 Sinyal Spektrum Misalignment (Girdhar,2004)
Pada contoh gambar diatas terlihat bahwa misalignment ditunjukkan dengan adanya peak spektrum pada 2xRPM dengan amplitudo yang lebih tinggi daripada 1xRPM. Gambar 4.5 menunjukkan jenis-jenis misalignment yang umum terjadi.
Gambar 4.6 (a). Angular Misalignment
Gambar 4.6 (b). Parallel Misalignment
Gambar 4.6 (c). Combination Angular/Parallel Misalignment
Gambar 4.6(a) merupakan gambar jenis angular misalignment. Pada angular misalignment ini, signature vibrasi umumnya akan muncul pada frekuensi yang sama dengan kecepatan putar (RPM) dari poros. Frekuensi tersebut seringkali disebut dengan 1x RPM. Hal ini dikarenakan saat terjadi angular misalignment kedua permukaan kopling akan membentuk sudut dengan besar tertentu. Apabila kopling tersebut berputar maka akan muncul getaran pada frekuensi yang sebanding dengan putaran poros kopling, disebabkan adanya siklus kontak-lepas-
kontak-lepas dari permukaan kopling. Hal inilah nantinya juga yang menyebabkan munculnya amplitude pada frekuensi 1xRPM.
Gambar 4.6(b) merupakan gambar jenis parallel misalignment. Pada parallel misalignment ini, maka akan muncul spektrum getaran pada frekuensi 2xRPM, dengan amplitudo yang lebih tinggi daripada 1xRPM. Hal tersebut adalah karakteristik utama dari indikasi/gejala adanya paralel/offset misalignment.
Ketika misalignment yang terjadi semakin parah maka akan terjadi peak amplitudo pada putaran harmonisnya (3xRPM sampai 8xRPM).
Gambar 4.7 Efek Misalignment pada Poros Kopling (Girdhar,2004)
\
Gambar 4.7 diatas menunjukkan bahwa pada saat terjadi misalignment pada poros kopling, maka dalam 1 siklus terjadi 2 kali hantaman yang menyebabkan getaran. Hal inilah yang membuktikan bahwa pada kondisi misalignment terjadi spektrum
yang tinggi pada 2xRPM. Terjadinya misalignment pada poros selalu mengakibatkan terjadinya unbalance, hal ini diindikasikan dengan amplitudo yang besar pada 1x RPM. Selain itu, terjadinya misalignment mengakibatkan peningkatan gaya-gaya yang terjadi pada bearing dan seal. Apabila seal bocor maka sistem pelumasan bearing akan mengalami kontaminasi dari partikel-partikel asing ataupun air. Kontaminasi pada pelumasan ini dapat mempengaruhi fungsi-fungsi dari pelumas sebagai pendingin dan pencegah keausan. Hal-hal tersebut dapat mempengaruhi umur dari bearing tersebut.
Bearing yang digunakan pada Cooling Waterpump 2A adalah SKF 6318 yang memiliki spesifikasi sebagai berikut :
Bd = 36 mm Pd = 140 mm N = 8
= 00
Untuk mengetahui adanya indikasi kerusakan pada bearing, maka perlu dilakukan perhitungan empat frekuensi utama dari bearing. Empat frekuensi utama tersebut yaitu :
1. Fundamental Train Frequency (FTF) : Frekuensi ini menunjukan kondisi dari cage ball bearing.
2. Ball Spin (BS) Frequency : Frekuensi ini menunjukkan kondisi dari bola pada bearing.
3. Outer Race (OR) Frequency : Frekuensi ini menunjukkan kondisi dari cincin luar dari bearing.
4. Inner Ring (IR) Frequency : Frekuensi ini menunjukkan kondisi dari cincin dalam dari bearing.
Formula dari keempat frekuensi diatas dapat dirumuskan sebgai berikut :
FTF = 1 cos
2 Pd
Bd
rps
(4.1)
BS = 2
2
cos
2 1 Pd
rps Bd Bd
Pd
(4.2)
OR =
N FTF
(4.3)IR =
N rps FTF
(4.4)Dimana:
rps = revolutions per second of inner race Bd = ball diameter
Pd = pitch diameter N = number of balls = contact angle
Gambar 4.8 Dimensi Pada Bearing
Gambar 4.8 diatas mengilustrasikan Pitch Diameter(Pd), Number of Balls(N), Sudut Kontak( ) dan Ball Diameter(Bd). Ball bearing yang tidak memiliki thrust load diasumsikan memiliki sudut kontak nol. Pada putaran mesin sebesar 1470 rpm (24,5 rps), maka akan diperoleh empat frekuensi utama dari bantalan SKF 6318 sebagai berikut:
FTF =
cos 0
140 1 36 2
5 , 24
= 9,1 HzBS = cos 0
140 1 36 5 , 36 24 ( 2
140 2
2
= 44,48 Hz OR =
8 9 , 1
= 72,8 Hz IR =
8 24 , 5 9 , 1
= 123,2 Hz
Dari perhitungan dan grafik spektrum yang diperoleh terlihat adanya indikasi dari kerusakan bearing.
Kerusakan ini dapat dilihat pada spektrum MIBV ke-12 kisaran frekuensi outer ringi (OR), yaitu 72,8 Hz (3x RPM) yang mempunyai peak value dikisaran 0,10447 mm/s. Amplitudo pada kisaran frekuensi tersebut merupakan indikasi terjadinya kerusakan pada bearing.
Akan tetapi dari grafik spektrum MIBV ke-12 dapat diketahui bahwa terdapat amplitudo yang tinggi pada frekuensi 143,5553 Hz (6xRPM). Peak tersebut
muncul dikarenakan adanya excessive clearance pada sambungan kopling. Jumlah baut pada sambungan kopling berjumlah 6. Pada saat misalignment yang terjadi semakin parah, maka clearance pada sambungan kopling akan semakin besar. Akibatnya terjadi impact pada keenam baut saat kopling berputar, yang direpresentasikan dengan munculnya peak spectrum pada 6xRPM.
Diagnosa dari sinyal spektrum pada pengukuran di titik MIBV adalah adanya indikasi misalignment.
Dapat diambil kesimpulan bahwa misalignment merupakan rootcause(akar permasalahan), karena mengakibatkan terjadinya indikasi kerusakan bearing dan excessive clearance pada sambungan kopling.
4.3. Struktur dan Pemodelan ANFIS
Permodelan anfis yang digunakan dalam penelitan ini menggunakan anfis yang diprogram menggunakan matlab.
Adapun tahapan yang digunakan seperti pada Gambar 4.9 dibawah.
Set Membership Fuction (MF)
Fuzzification
Rule Evaluation
Training Data ke Anfis
Root Mean Square Error (RMSE)
Start
End Set Training Anfis : - Jumlah Epoch (iterasi) - Target Error
Metode Backpropagation Neural Network Sistem Hybrid
Anfis
Set dan bandingkan : - Jumlah MF(n), dan n+2
- Type MF : Trimf, trapezoidal, gbellmf
Gambar 4.9 Flowchart permodelan anfis
4.3.1 Fuzzifikasi dan Set Membership Function Untuk Penentuan Sisa Umur
Untuk penentuan membership function awal menggunakan tipe fungsi keangotaan gbell dan dengan input frekuensi dan amplitudo (power spektrum), maka akan didapatkan kurva membership function sebagai berikut :
Gambar 4.10 Fuzzikasi dan Membership function untuk power spektrum
Gambar 4.11 Fuzzikasi dan Membership function untuk frekuensi 4.3.2 Rule Evaluation Fuzzifikasi Untuk Penentuan Sisa Umur Tahap kedua setelah fuzzifikasi adalah rule evaluation.
Dalam tahapan ini digunakan aturan IF……THEN…… dengan penghubung AND. Karena power spektrum memiliki 3 fuzzy value dan frekuensi memiliki 4 fuzzy value maka rule evaluation mengikuti aturan 3 x 4 rule. Sehingga terdapat 12 rule seperti pada gambar 4.12 dibawah :
Gambar 4.12 Rule penentuan sisa umur
Training Data ke Anfis
Untuk proses training anfis ditunjukkan pada gambar 4.13 dibawah.
Gambar 4.13 Program ANFIS GUI
Secara umum penggunaan anfis memiliki 3 tahapan, yaitu : 1. Load data
Baik data training, checking untuk validasi maupun data data testing.
2. Generate FIS
Pada tahap ini digunakan grid partisi untuk men-generate FIS.
Dimana grid partisi merupakan pemilihan type membership funtion, jumlah membership function dan tipe output yang diinginkan. Dalam tugas akhir ini akan diinginkan output linier.
Berikut tampilan grid partisi dari program anfis.
Gambar 4.14 Setting parameter untuk grid partisi pada anfis.
3. Training FIS
Pada tahap ini akan dipilih proses training untuk FIS yang telah dibuat. Dalam tugas akhir ini akan dibandingkan antara metode pembelajaran backpropagation dengan hybrid. Namun sebelumnya dilakukan setting parameter untuk menentukan error toleransi dan maksimum iterasi yang diinginkan.
Maksimum iterasi menunjukan jumlah iterasi maksimum yang boleh dilakukan selama proses training. Iterasi akan dihentikan apabila nilai iterasi melebihi maksimum iterasi yang ditetapkan. Error yang ingin dicapai mengindikasikan sampai sejauh mana proses training berhasil. Setelah parameter telah ditetapkan, maka dilakukan proses training dan akan menghasilkan error tertentu. Proses training dinyatakan berhasil jika error yang terjadi memenuhi batas error yang telah
ditetapkan. Jika error yang terjadi besar berarti training gagal sehingga perlu dilakukan perubahan pada jaringan. Untuk tugas akhir ini akan diset toleransi error 10-6 dan jumlah iterasi 100 untuk masing-masing sisa umur. Pada gambar 4.15 dibawah ditunjukkan proses training pada program anfis.
Gambar 4.15 Training data pada anfis
Setelah proses training selesai, maka akan didapatkan sebuah struktur anfis yang dapat digunakan untuk memprediksi sisa umur berdasarkan pola input data yang diberikan. Stuktur anfis ini merupakan struktur FIS sugeno yang telah mengalami proses training. Karena pada saat proses belajar (training) terjadi perubahan-perubahan parameter pada fungsi keanggotaannya.
Pada gambar 4.16 dibawah ditunjukkan struktur anfis dalam mengidentifikasi sisa umur 1 bulan.
Gambar 4.16. Struktur anfis
Gambar 4.17. Surface viewer
Pada Gambar 4.17 ditunjukkan surface viewer yang memberikan informasi tentang hubungan input-output dari anfis yang akan digunakan dalam memprediksi sisa umur.
4. Tes checking dan testing anfis
Hasil training dari Anfis dapat dievaluasi dengan eksperimen validasi. Eksperimen validasi (checking) dapat berupa testing pada jaringan yang telah ditraining sebelumnya. Dengan menentukan besar error tertentu maka akan diketahui apakah anfis yang telah disusun valid atau tidak. Jika error RMSE (Root Mean Square Error) maka anfis berhasil memprediksi sisa umur komponen. Nilai RMSE merupakan ukuran performance untuk melihat kemampuan dari jaringan untuk memproses informasi yang didapatkan. Nilai RSME yang ditentukan adalah 10-6.
BAB V
TRAINING DAN VALIDASI ANFIS
5.1 Input Data Training
Data yang akan digunakan sebagai data input I anfis adalah power spektrum. Karena power spektrum merepresentasikan besarnya getaran yang terjadi. Sedangkan sebagai input 2 adalah frekuensi, dimana frekuensi dapat merepresentasikan letak dari masing-masing penyebab getaran.
Gambar 5.1 Hubungan input -output pada struktur anfis Dengan menggunakan program anfis yang telah dibuat, akan dibandingkan performance dari sistem pembelajaran backpropagation dengan hybrid pada anfis dalam mengenali sinyal dalam memprediksi sisa umur saat proses training dan validasi. Pada proses ini akan dibandingkan pengaruh 3 tipe membership function (MF) yaitu gbell (lonceng), trimf (segitiga) dan trapezoidal (trapesium) dengan 3 4 MF. Lalu akan dibandingkan juga pengaruh penambahan membership function sebanyak 2 buah pada masing-masing model anfis yang telah dibuat.
Output dari anfis toolbox ini adalah Root Mean Square Error (RMSE). Error yang terjadi menunjukkan tingkat keakurasian struktur anfis yang telah disusun dalam mengenali pola data yang merepresentasikan sisa umur. Adapun contoh proses traning anfis dengan metode pembelajaran hybrid untuk
masing-masing tipe membership function terlihat pada gambar 5.2 (a), 5.2(b), 5.2 (c) dibawah ini :
Gambar 5.2(a). Hybrid training anfis dengan membership function trimf (segitiga)
Gambar 5.2(b). Hybrid training anfis dengan membership function gbell(lonceng)
Gambar 5.2(c). Hybrid training anfis dengan membership function trapmf (trapesium)
Kurva biru menunjukkan konvergensi Root Mean Square Error (RMSE) dari data training. Kurva konvergensi ini digunakan untuk mengevaluasi hasil dari proses training yang dilakukan. Dari grafik konvergensi dapat dilihat juga bahwa jaringan memiliki tren descending (semakin menurun). Apabila penurunan pada RMSE sudah tidak signifikan, proses training bisa dihentikan. Pada gambar 5.2(a) dan 5.2(c) terlihat bahwa proses hybrid training dengan menggunakan type membership function segitiga dan trapesium langsung dapat mencapai error minimalnya pada iterasi ke 2. Pada gambar 5.2(b), proses hybrid training dengan menggunakan type membership function lonceng dapat mencapai error minimalnya pada iterasi ke 25. Karena anfis yang telah disusun telah dapat mencapai error yang diinginkan, ini berarti jaringan telah mempelajari data dengan baik sehingga siap untuk digunakan dalam memprediksi sisa umur.
Dari data training menggunakan sistem pembelajaran menggunakan sistem pembelajaran hybrid dengan 3 4 membership function diperoleh data seperti pada table 5.1 dibawah.
Tabel 5.1 Training data menggunakan sistem pembelajaran hybrid (3 4 MF)