Abstrak— Pada tugas akhir ini membahas tentang manajemen daya listrik pada sistem kendaraan listrik dengan dua sumber listrik. Kendaraan listrik yang dibahas menggunakan sumber listrik yang berasal dari baterai 144V 40 Ah dan sel surya dengan daya puncak 670 Watt. Sistem kelistrikan kendaraan listrik menggunakan tegangan DC bus 500 V. Motor yang digunakan dalam pengujian ini adalah jenis Interior Permanent Magnet Synchronous Motor (IPMSM) dengan daya rating 5 kW. Pengaturan kecepatan motor menggunakan sistem Field Oriented Control. Konverter multi-input bi-directional yang digunakan merupakan paralel antara konverter bi-directional(dua arah) dengan konverter uni-directional(satu arah). Konverter bi-directional digunakan untuk mengatur tegangan dari sumber baterai. Sedangkan konverter uni-directional digunakan untuk mendapatkan daya maksimum dari sel surya. Pada konverter uni-directional sel surya menggunakan metode Maximum Power Point Tracking(MPPT) Hill Climbing. Hasil dari simulasi menunjukkan bahwa konverter mampu mengatur aliran daya dari baterai maupun sel surya baik saat driving maupun regenerative braking kendaraan listrik.
Kata Kunci—konverter multi-input bi-directional, regenerative braking, MPPT Hill Climbing, IPMSM.
I. PENDAHULUAN
ENDARAAN listrik membutuhkan sistem penyimpanan energi yang ringan dan efisiensi yang baik. Oleh karena itu, penelitian saat ini menuju ke sistem hybrid yang dapat mengkombinasikan beberapa sumber energi. Sebagian besar penelitian saat ini menggunakan baterai yang dikombinasikan dengan sel surya untuk mendapatkan kualitas yang tinggi, lebih handal dan efisiensi daya. Pada sistem dengan energi penyimpanan berupa baterai, kemampuan aliran daya secara dua arah merupakan kunci kemampuan dari suatu sistem penyimpanan. Lebih jauh lagi, beberapa sumber daya input memiliki kemampuan menyuplai beban secara individual ataupun secara bersamaan. Konverter DC-DC dua arah yang dioperasikan dengan penyimpanan energi seperti baterai menjadi pilihan yang menjanjikan untuk suatu sistem listrik, termasuk kendaraan listrik hybrid[1]. Hal ini tidak hanya mengurangi biaya dan meningkatkan efisiensi, tetapi juga meningkatkan kinerja sistem. Dalam aplikasi kendaraan listrik, baterai penyimpanan energi menyerap energi regenerasi yang dihasilkan oleh sistem tersebut. Selain itu konverter DC-DC dua arah yang ditunjukkan oleh Gambar 1 juga diperlukan untuk menarik daya dari baterai untuk
meningkatkan ke tegangan yang lebih tinggi saat kendaraan mulai bergerak, akselerasi dan mendaki bukit[1]. Dengan kemampuan untuk membalik arah aliran arus dan daya, konverter DC-DC dua arah semakin berkembang penggunaannya untuk mencapai transfer daya dari beberapa sumber daya DC secara dua arah.
Gambar 1. Konverter DC-DC dengan sistem dua arah
Dalam aplikasi energi terbarukan, Konverter DC-DC dengan dua input dapat digunakan untuk menggabungkan berbagai jenis sumber energi[2-4]. Untuk aplikasi kendaraan listrik dibutuhkan sebuah konverter DC-DC multi-input dengan sistem bi-directional[5]. Konverter DC-DC multi-input dengan sistem bi-directional adalah inti yang menghubungkan sumber daya dan elemen penyimpanan dan mengatur aliran daya. Pada tugas akhir ini akan membahas tentang konverter DC-DC multi-input dengan sistem bi-directional dengan sistem regeneratif.
II. SISTEMKONVERTERMULTI-INPUT BI-DIRECTIONAL
A. Konfigurasi Sistem
Konfigurasi sistem seperti ditunjukkan pada Gambar 2 merupakan gambar dari sistem kelistrikan pada tugas akhir ini. Skema di bawah ini terdiri dari pemodelan baterai, panel surya, konverter DC-DC, Inverter 3 fasa, motor dan kontrol kecepatan. Pada tugas akhir ini sumber dari sistem menggunakan baterai lithium ion yang memiliki performa yang bagus sebagai sumber listrik pada kendaraan listrik, baterai lithium ion ini memiliki tegangan nominal sebesar 144 V dengan kapasitas 40 Ah. Dan untuk sumber tambahan digunakan panel surya dengan tegangan nominal sebesar 114.6 V dengan arus nominal 6A. Beban yang digunakan adalah sebuah motor sinkron dengan permanen magnet dengan daya keluaran 5 kW, dengan rating tegangan 3 fasa 220/380. Oleh karena itu digunakan inverter 3 fasa dengan sistem Vector Control dengan pengaturan kecepatan motor. Kendaraan listrik yang akan digunakan sebagai referensi
Denny Novian Mustoko, Dedet Candra Riawan, dan Arif Musthofa.
Jurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS)
Jl. Arief Rahman Hakim, Surabaya 60111
E-mail: [email protected], [email protected]
adalah jenis ATV-F-3050D-AB. Dalam penelitian ini akan memodifikasi kendaraan tersebut menjadi kendaraan listrik.
Berikut adalah spesifikasi dari kendaraan ATV-F-3050D-AB.
SPECIFICATIONS : ATV-3050D-AB ENGINE INFO
Engine type : 110cc 4-stroke,single cylinder Displacement : 110cc
Cooling : air-cooled
Max horsepower : 5.0kW/7,500r/min
Max torque : 7.0N.m/5,500r/min (N.m/r/min)
Engine oil : 0.9L
B. Pemodelan Konverter DC-DC Multi-input Bi-directional Konverter multi-input bi-directional ini merupakan paralel antara dua buah konverter elektronika daya dimana salah satunya memiliki kemampuan bi-directional dan yang lain uni-directional. Gambar 3 menunjukkan skema konverter yang akan digunakan.
Untuk konverter non isolated bi-directional digunakan rangkaian konverter DC-DC 2 kuadran(Two Quadrant DC-DC Chopper)
Untuk konverter uni-directional(satu arah) digunakan rangkaian boost DC-DC dengan Hill Climbing MPPT.
1) Konverter DC-DC Two quadrant
Konverter jenis ini dapat beroperasi dengan dua arah berbeda. Mode boost ketika baterai harus menyuplai arus ke beban. Sedangkan mode buck ketika beban terdapat arus balik dan menyuplai daya ke baterai. Gambar 4 menunjukkan rangkaian konverter DC Chopper 2 kuadran.
Mode boost = = (1) = 1 − (2) Mode buck = = (3) = (4)
Pada Gambar 4, switch S1 merupakan switch saat konverter beroperasi sebagai boost, sedangkan S2 merupakan switch utama saat konverter beroperasi sebagai buck. Pada konverter ini digunakan sebagai pengatur tegangan DC di beban. Nilai tegangan pada sisi beban dan baterai dapat diatur dengan mengatur duty cycle dari switch.
2) Konverter Boost DC-DC dengan Hill Climbing MPPT Konverter yang digunakan pada sel surya merupakan konverter Boost DC-DC konvensional dengan pengaturan MPPT. Pada Gambar 5 menunjukkan rangkaian konverter boost DC-DC konvensional untuk sel surya.
Sedangkan pada Gambar 6 menunjukkan metode MPPT Hill Climbing[8] yang diterapkan pada konverter boost untuk sel surya.
Dan pada Gambar 7 merupakan rangkaian keseluruhan konverter multi-input bi-directional yang digunakan.
Gambar. 2. Konfigurasi sistem.
Gambar.5. Konverter Boost DC-DC untuk sel surya Gambar. 4. Two quadrant DC-DC chopper.
Gambar.6. Konverter Boost DC-DC untuk sel surya dengan metode MPPT Hill Climbing
menunjukkan posisi rotor.
− = +
(5)
= ∫ (6)
Dimana adalah torsi motor, adalah torsi beban, momen inersia dari beban berputar, pasang kutub, koefisien gesek dan kecepatan sudut.
Dalam pemodelan FOC, dibutuhkan Transformasi Park. Transformasi Park berfungsi untuk mengubah sistem 3 fasa AC ke dalam sistem 2 fasa DC sehingga akan membantu proses pengendalian sistem.Berikut adalah persamaan yang dibutuhkan:
= × cos × + cos − × + cos − × (7)
= × − sin × − sin − × − sin − × (8)
D. Pemodelan Baterai Lithium Ion
Baterai lithium ion yang digunakan adalah model BP4840A/40AH yang merupakan keluaran dari pabrik G-Power yang berkedudukan di Guangdong, China. Baterai lithium ion ini memiliki tegangan nominal sebesar 48 V dan kapasitas 40Ah ditunjukkan pada Tabel 1. Baterai tersebut kemudian akan diseri 3 untuk mendapatkan tegangan nominal baterai sebesar 144.3 V dengan kapasitas 40Ah.
Tabel 1.
Parameter baterai lithium ion model G-BP4840A/40AH[6]
Parameter Nilai*
Spesifikasi 48.1V/40Ah
Kapasitas (Ah) 40
Tegangan nominal (V) 48.1
Tegangan charge cut-off (V) ≤54.6
Tegangan discharge cut-off (V) ≥39.0
Arus charging ≤0.5C
Arus kerja 0.5C
Arus discharge maksimum 2C
Resistansi internal(mΩ) ≤50
Berikut adalah spesifikasi panel surya model SPR-X21-335. Tabel 2.
Spesifikasi panel surya[7]
Parameter Nilai*
Modul SPR-X21-335
Jumlah sel 96
Daya nominal (Watt) 335
Toleransi daya (%) +5/-0
Nilai Tegangan (Vmp) 57.3
Nilai Arus (Imp) 5.85
Tegangan Open Circuit (Voc) 67.9
Arus short Circuit (Isc) 6.23
Daya rata-rata (Watt) 343
Koefisien temperatur dari Isc (mA/oC) 3.5 Koefisien temperatur dari Voc (mV/oC) -167.4 F. Pemodelan Motor IPMSM
Motor IPMSM yang digunakan pada penelitian ini merupakan hasil analisis dari salah satu paper referensi[9]. Tabel 3 menunjukkan parameter dari motor.
Tabel 3.
Spesifikasi motor IPMSM
Parameter Nilai* Torsi maksimum 7.66 Nm Kecepatan maksimum 6200 rpm R 1.45 Ω Lq 11.04 mH Ld 3.74 mH λpm 0.0858 Wb J 99.6 kg.m2 ×10-6 Jumlah kutub 4
III. SIMULASIDANANALISIS
Pengujian yang dilakukan terdapat empat pengujian yaitu: 1. Pengujian sistem dengan variasi keadaan intensitas
cahaya matahari 600 W/m2, 800 W/m2, 1000 W/m2 2. Pengujian torsi dengan beban bervariasi
3. Pengujian kecepatan referensi yang bervariasi 4. Pengujian regenerative braking
A. Pengujian Sistem dengan Intensitas Cahaya Bervariasi Pengujian ini bertujuan untuk mengamati kemampuan sistem untuk mengatur aliran daya dengan daya dari sel surya yang berubah. Pada Gambar 9 adalah kurva intensitas cahaya yang diberikan pada pengujian ini. Bagian 1 menunjukkan intensitas cahaya turun dari 1000 W/m2 menjadi 800 W/m2. Bagian 2 menunjukkan intensitas cahaya turun dari 800 W/m2 menjadi 600 W/m2. Pengujian pada subbab ini menggunakan referensi kecepatan sebesar 170 rpm,torsi beban 4 Nm dan State Of Charge(SOC) baterai dalam keadaan 90 %.
Gambar. 9. Kurva intensitas cahaya dalam pengujian
Pada Gambar 10 menunjukkan respon keluaran daya aktual dari sel surya dan daya referensi sel surya dari metode MPPT Hill Climbing. Tabel 4 menunjukkan perbandingan antara daya referensi dengan daya aktual dari sel surya.
Gambar 10. Kurva respon daya aktual sel surya(biru) dan daya referensi(merah)
Tabel 4.
Daya keluaran aktual sel surya dengan daya referensi dengan intensitas cahaya berbeda
Intensitas cahaya Daya referensi Daya aktual
1000 W/m2 ± 680 Watt ± 660 Watt
800 W/m2 ± 540 Watt ± 520 Watt
600 W/m2 ± 400 Watt ± 380 Watt
Gambar 11 menunjukkan daya yang dikeluarkan baterai, sel surya dan daya yang diserap oleh motor. Dari Gambar 11, kita dapat melihat ketika daya yang dihasilkan dari sel surya berkurang maka dari baterai akan secara otomatis akan menaikkan daya yang dikeluarkan. Hal ini akan menyebabkan proses discharge pada baterai akan berlangsung lebih cepat seperti ditunjukkan pada Gambar 12. Dengan semakin banyak daya yang dikeluarkan oleh baterai maka kurva SOC akan semakin curam
Gambar 11. Daya baterai(hijau), Daya sel surya(biru) dan
daya diserap oleh motor(merah) dengan variasi intensitas cahaya
Gambar 12. Kurva SOC baterai dengan variasi intensitas
cahaya
B. Pengujian Sistem dengan Torsi Beban Bervariasi
Pengujian ini bertujuan untuk mengetahui respon sistem terhadap torsi beban yang berubah. Ada dua pengujian yang dilakukan pada subbab ini adalah dengan torsi beban 4 Nm dan 7 Nm. Saat torsi 4 Nm menunjukkan bahwa kendaraan sudah berjalan normal. Saat torsi berubah dari 4 Nm ke 7 Nm, kendaraan listrik diasumsikan sedang melewati tanjakan. Pengujian pada subbab ini menggunakan kecepatan referensi 200 rpm dan intensitas cahaya 800 W/m2 dan SOC 90%.
Gambar 13. Kurva respon torsi motor(biru) dan torsi
beban(merah) dengan perubahan torsi dari 4 Nm ke 7 Nm
Gambar 14. Respon kecepatan motor(biru) terhadap
kecepatan referensi(merah) pada pengujian torsi bervariasi
Berdasarkan kurva pada Gambar 13 dan Gambar 14 respon torsi motor dan kecepatan motor steady state pada waktu kurang dari 0.2 detik.
Gambar 15. Daya sel surya(biru), Daya baterai(hijau), Daya yang diserap motor(merah) dengan pengujian torsi bervariasi
Gambar 16. Kurva SOC baterai dengan pengujian torsi bervariasi
C. Pengujian Sistem dengan Kecepatan Bervariasi
Pengujian ini dilakukan untuk mengetahui bagaimana respon sistem terhadap kecepatan referensi yang berubah. Pada subbab ini, diasumsikan kendaraan mengalami percepatan untuk menaikkan kecepatan awalnya dari 170 rpm ke 200 rpm. Pada pengujian ini, torsi beban konstan pada 4 Nm dan SOC baterai dalam keadaan 90 %.
Berikut pada Gambar 17 menunjukkan respon kecepatan motor dengan kecepatan referensi yang berubah. Dari keadaan awal diam menjadi kecepatan 170 rpm dibutuhkan waktu 0.2 detik. Begitu pula pada proses akselerasi dari kecepatan 170 rpm menuju 200 rpm, respon sistem mampu menyesuaikan dalam waktu 0.2 detik.
Gambar 17. Respon kecepatan motor(biru) terhadap
kecepatan referensi(merah) pada pengujian kecepatan bervariasi
Gambar 18. Respon torsi motor(biru) terhadap torsi
beban(merah) pada pengujian kecepatan bervariasi
Gambar 19. Daya sel surya, Daya baterai, Daya yang diserap
motor(merah) dengan pengujian kecepatan bervariasi
Gambar 20. Kurva SOC baterai dengan pengujian kecepatan
bervariasi
D. Pengujian Sistem saat Kondisi Regenerative Braking Pengujian ini untuk mengetahui kemampuan sistem dalam kondisi regenerative braking. Terdapat dua keadaan saat regenerative braking yaitu:
1. Kendaraan listrik diasumsikan pada jalan turunan sehingga memerlukan pengereman untuk tetap mempertahankan kecepatannya.
2. Kendaraan listrik diasumsikan melakukan pengereman sampai kendaraan berhenti
1) Pengujian Regenerative Braking dengan Kondisi Kendaraan Listrik Melewati Turunan
Pada kondisi ini diasumsikan dengan memberikan torsi negatif pada sistem. Gambar 21 menunjukkan torsi beban yang diberikan pada sistem turun dari 4 Nm menjadi -3 Nm. Pengujian mengunakan kecepatan referensi 200 rpm, intensitas cahaya pada sel surya 800 W/m2 dan SOC baterai dalam keadaan 90%.
Gambar 21. Respon torsi motor(biru) terhadap torsi
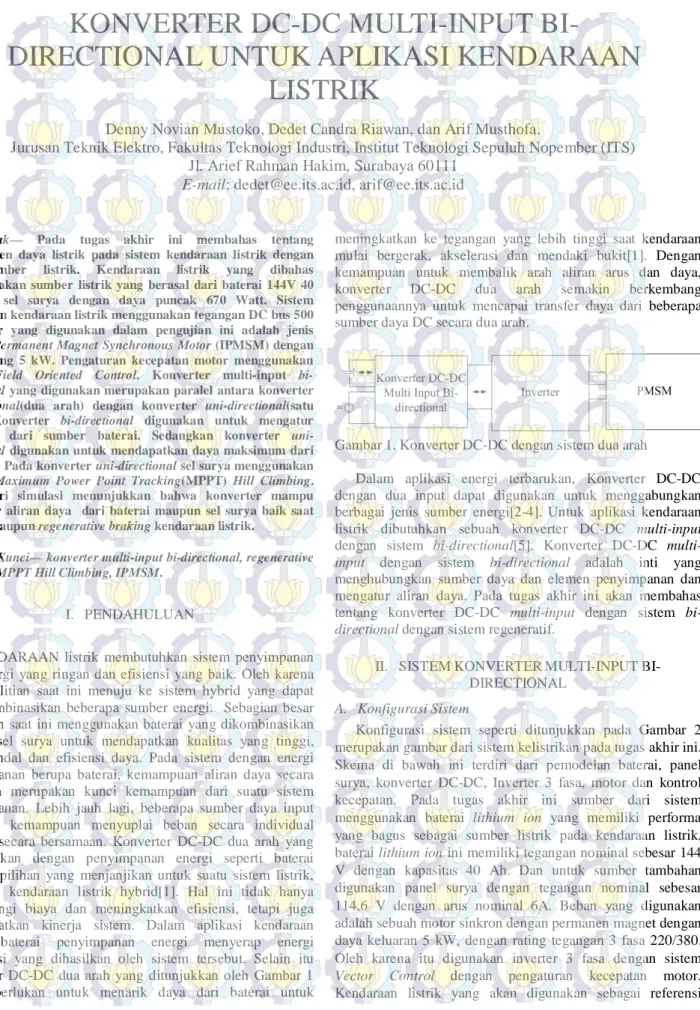
Gambar 22. Kurva respon kecepatan aktual motor(biru) terhadap kecepatan referensi(merah) pada kondisi regenerative braking
Pada kondisi ini, motor akan akan beralih fungsi menjadi generator sehingga akan menyuplai daya ke baterai. Daya yang dihasilkan motor pada keadaan regenerative ini adalah sebesar ±550 Watt. Daya dari sel surya sebesar ±520 Watt juga akan membantu proses charge ke baterai. Daya baterai, daya sel surya dan daya dari motor saat beroperasi sebagai generator dapat dilihat pada Gambar 23. Pada Gambar 24 menunjukkan kurva SOC pada baterai saat terjadi regenerative braking. Dengan kondisi SOC awal baterai sebesar 90%.
Gambar 23. Daya sel surya(biru), Daya baterai(hijau), Daya
yang diserap motor(merah) dengan pengujian regenerative braking
Gambar 24. Kurva SOC baterai saat regenerative braking
Pada proses regenerative braking, daya yang dihasilkan motor sebagai generator ±560 Watt dengan daya yang dihasilkan sel surya sebesar ±520 Watt. Daya charge yang diterima oleh baterai sebesar ±1060 Watt.
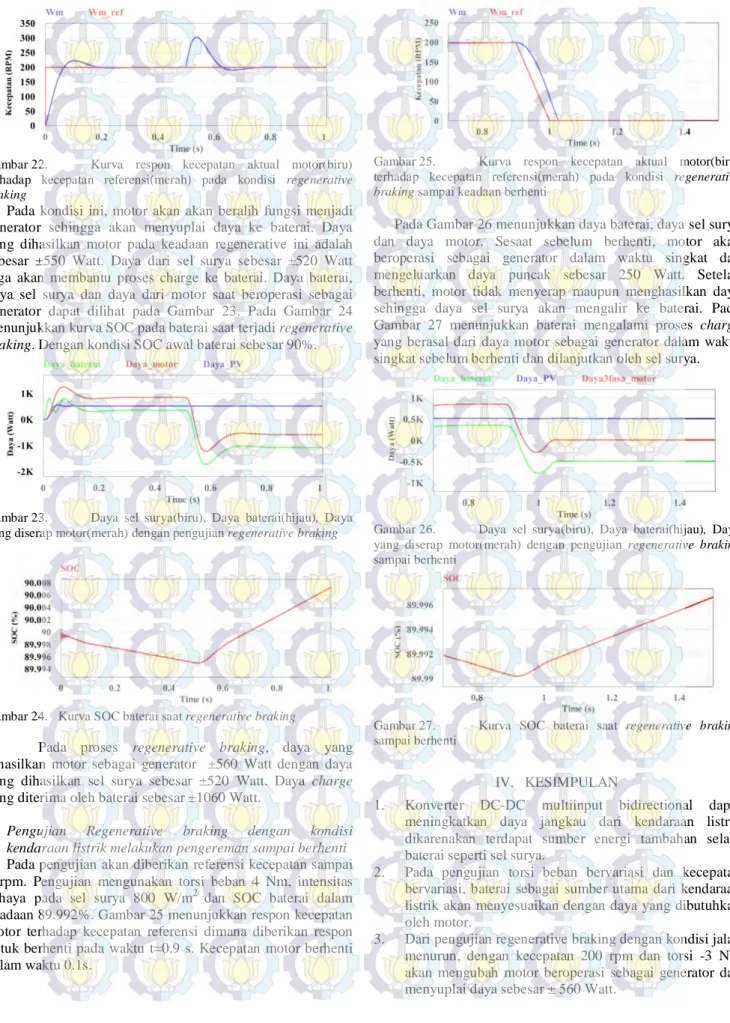
2) Pengujian Regenerative braking dengan kondisi kendaraan listrik melakukan pengereman sampai berhenti Pada pengujian akan diberikan referensi kecepatan sampai 0 rpm. Pengujian mengunakan torsi beban 4 Nm, intensitas cahaya pada sel surya 800 W/m2 dan SOC baterai dalam keadaan 89.992%. Gambar 25 menunjukkan respon kecepatan motor terhadap kecepatan referensi dimana diberikan respon untuk berhenti pada waktu t=0.9 s. Kecepatan motor berhenti dalam waktu 0.1s.
Gambar 25. Kurva respon kecepatan aktual motor(biru)
terhadap kecepatan referensi(merah) pada kondisi regenerative braking sampai keadaan berhenti
Pada Gambar 26 menunjukkan daya baterai, daya sel surya dan daya motor. Sesaat sebelum berhenti, motor akan beroperasi sebagai generator dalam waktu singkat dan mengeluarkan daya puncak sebesar 250 Watt. Setelah berhenti, motor tidak menyerap maupun menghasilkan daya sehingga daya sel surya akan mengalir ke baterai. Pada Gambar 27 menunjukkan baterai mengalami proses charge yang berasal dari daya motor sebagai generator dalam waktu singkat sebelum berhenti dan dilanjutkan oleh sel surya.
Gambar 26. Daya sel surya(biru), Daya baterai(hijau), Daya
yang diserap motor(merah) dengan pengujian regenerative braking sampai berhenti
Gambar 27. Kurva SOC baterai saat regenerative braking
sampai berhenti
IV. KESIMPULAN
1. Konverter DC-DC multiinput bidirectional dapat meningkatkan daya jangkau dari kendaraan listrik dikarenakan terdapat sumber energi tambahan selain baterai seperti sel surya.
2. Pada pengujian torsi beban bervariasi dan kecepatan bervariasi, baterai sebagai sumber utama dari kendaraan listrik akan menyesuaikan dengan daya yang dibutuhkan oleh motor.
V. SARAN
1. Untuk pengaturan kecepatan motor IPMSM dapat menggunakan MTPA(Maximum Torque per Ampere) karena nilai dari referensi arus stator sumbu-d dengan mengetahui nilai torsi yang dibutuhkan maka akan didapatkan pengaturan optimal dari arus sumbu-d dapat meminimalkan total arus stator.
2. Pada proses regenerative perlu diperhatikan arus charge yang masuk ke dalam baterai jangan sampai melebihi rating dari baterai. Hal ini dapat diatasi dengan cara metode Current Control dan penambahan dynamic braking
UCAPANTERIMAKASIH
“Penulis Denny Novian M mengucapkan terima kasih kepada Dosen pembimbing yang telah membimbing dalam mengerjakan tugas akhir ini, Alumni jurusan Teknik Elektro yang telah memberi dukungan finansial melalui beasiswa selama 2010-2012, Direktorat Pendidikan Tinggi, Departemen Pendidikan dan Kebudayaan Republik Indonesia yang telah memberikan dukungan finansial melalui Beasiswa Bidik Misi tahun 2013-2014”.
DAFTARPUSTAKA
[1] Diego Feroldi, EnricRoig, Maria Serra, Jordi Riera, “Energy Management Strategies For Fuel Cell-Hybrid Vehicles ,” .
[2] Y.-C. Liu, Y.-M.Chen and S.-H. Lin, “Double-Input PWM DC/DC converter for high-low voltage sources,” Proc. IEEE Int. Telecommun. Energy Conf., 2003, pp. 27–32.
[3] Y. L. Juan and H. Y. Yang, “Hybrid Power System with A Two-Input Power Converter,” in WSEAS Transactions on Circuit and Systems, Volume 12, Issue 5, May 2013.
[4] Yuvaraj V, Roger Rozario, S.N.Deepa, “Implementation and Control of Multi–Input Power Converter for Grid Connected Hybrid Renewable Energy Generation System,” in Student Pulse Vol. 3, Issue 6, June 2011.
[5] HinaNaaz , B.T.Deshmukh,” Control Of Multi Input DC/DC Converter Using Battery And Ultra Capacitor,” in International Journal of Advances in Engineering & Technology, May 2012.
[6] Wanxiang EV Co., Ltd, “Battery Spesification”
[7] SUNPOWER, “Solar Module Spesification,” Document No. 505915 Rev A
[8] Fangrui Liu, Yong Kang, Yu Zhang and Shanxu Duan, “Comparison of P&O and Hill Climbing MPPT,” IEEE page 804-807
[9] Hyunbae Kim and Robert D. Lorenz, “Using On-Line Parameter Estimation to Improve Efficiency of IPM Machine Drives,”