RANCANG BANGUN OTOMATISASI POMPA MOTOR DC DAN SOLENOID VALVE
PADA ALAT UKUR TEKANAN DARAH DAN DENYUT NADI
Taufik Agus Budiyanto 11306141023 Fisika FMIPA UNY 1. Sensor Mpx 2100gp
95 0.5 5.066 0.001
Untuk peramaan fungsi transfernya didapat dari gradient dari grafik hubungan antara beasarnya tegangan dengan besarnya tekanan. Untuk nilainya dapat dilihat pada grafik dibawah ini:
Dari grafik diatas kita dapat mengetahui persamaan fungsi transfernya yaitu y = 0.0534x - 0.0028. dari fungsi tersebut dapat diketahui bahwa nilai tekanan akan selalu linear terhadap perubahan tegangannya.
2. Penguat instrumentasi (ad620)
out sensor(mV) gain(mV)
0.534 225
3. Band pass filter
Selain low-pass filter ( sinyal yang lewat hanya frekuensi rendah ), jenis umum lainnya yaitu high-pass filter( sinyal yang lewat hanya frekuensi tinggi ), band-reject (blok sinyal tertentu) dan band-pass (menolak frekuensi tinggi dan rendah, hanya melewatkan sinyal sekitar frekuensi menengah). Yang paling sederhana band-pass filter dapat dibuat dengan menggabungkan Low-pass filter dengan High-pass filter.
Pada alat yang saya buat mengunakan Band pass filter skema rangkaian dapat dilihat pada gambar dibawah ini:
Sebelum menentukan nilai R1, R2,C1 dan C2 alangkah baiknya kita mencari fungsi transfer dari komponen diatas sehingga kita dapat meramalkan nilai R dan C nya, untuk penurunan rumus fungsi transfernya dapat dilihat di bawah ini:
Sehungga,
Dari rumus diatas kita dapat memprediksikan nilai dari R dan C nya dengan menggunakan
MATLAB. Adapun untuk program dan hasil plotnya dapat dilihat dibawah ini:
Program
function[] = bandpassfilter () % komponen
R1 = 10e3; R2 = 120e3; C1 = 47e-6; C2 = 22e-9;
w = logspace(1,5,500);
H = -(R2*C1*j*w)./((R2*C2*j*w+1).*(R1*C1*j*w+1)); b = abs(H);
D = angle(H)*180/pi; figure;
subplot(2,1,1);
h = semilogx(w,C ,'r'); set(h,'LineWidth',1.4); ylabel('|H(j\omega)| (dB)'); title('Bandpass Filter'); box off; set(h,'LineWidth',1.4);
ylabel('\angleH(j\omega) (Deg)'); %box off;
grid on;
ylim([min(D) max(D)]); xlim([0 w(end)]);
xlabel('Frekuensi (rad/s)');
%================================================ f = linspace(0,3000,500);
w = f*2*pi;
H =-2*(j*w+500)./(j*w + 1000); figure;
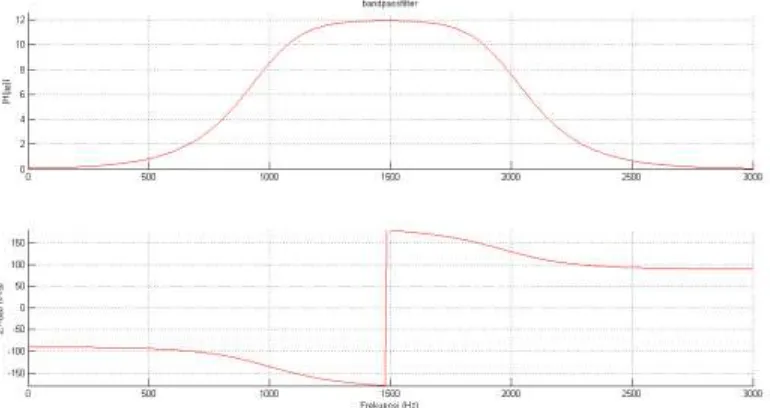
subplot(2,1,1); h = plot(f,b ,'r'); set(h,'LineWidth',1.4); ylabel('|H(j\omega)|'); title('bandpassfilter'); box off; set(h,'LineWidth',1.4);
ylabel('\angleH(j\omega) (Deg)'); box off;
grid on;
ylim([min(D) max(D)]); xlim([0 f(end)]);
Figure1
Besarnya H(jw) dan phase H(jw) berdasarkan rumus transfer fungsinya
Figure 2 ( respon frekuensi skala linear )
4. Coupling AC
Dari gambar diatas dapat diketahui bahwa setelah sinyal melewati pembagi tegangan, sinyal tersebut merupakan sinyal AC. Dalam praktikum praktikan menggukan CRO, untuk mengetahui bahwa sinyal tersebut adalah sinyal AC praktikan meletakan coupling pada CRO ke ground, selanjutnya mengatur posisi garis yang terdapat pada layar CRO ketengah-tengah layar dan tengah-tengah layar tersebut dianggap 0V atu gnd, selanjutnya mengarahkan coupling pada CRO ke AC sehingga mengalami osilasi sehingga osilasinya sperti gambar di bawah ini
( )
w = logspace(1,5,500);
H = (R2*C1*j*w)./((R2*C1*j*w).*((R1^2)*C1*j*w+R1)); b = abs(H);
C = 20*log10(b); D = angle(H)*180/pi; figure;
subplot(2,1,1);
h = semilogx(w,C ,'r'); set(h,'LineWidth',1.4); ylabel('|H(j\omega)| (dB)'); title('COUPLING AC');
box off; grid on;
xlim([0 w(end)]); subplot(2,1,2);
h = semilogx(w,D ,'r'); set(h,'LineWidth',1.4);
ylabel('\angleH(j\omega) (Deg)');
5. Pompa Motor DC dan valve
Karena untuk motor DC torsi sebanding dengan arus yang ada pada Ic (T = K * ic
dengan K adalah konstanta ), Sementara dalam mode aktif, persamaan yang
berkaitan ic ke Vin dapat ditemukan (catatan VBE = VBE (on/1)), sehingga
( )
( )
jika kita meningkatkan Vin, ib meningkat yang berarti meningkat ic dan VCEmenurun
Untuk Vin >> VBE dan VCE = VCE (sat): daerah saturasi,motor mencapai kecepatan maksimum.
Jika kita mengikuti model mekanik motor DC yang diasumsikan satu satunya torsi
diterapkan pada poros motor adalah bahwa poros inersia (Jm) dan redaman
(B) kita dapat menghitung fungsitransfer kecepatan (w) dibandingkan ΔV = Vin- VBE
̇
( )
( ) ( )
Menurut transfer fungsi hubungan steady state antara kecepatan dan tegangan dalam hal ini tidak ada kondisi beban maka:
6. Funsi transfer total
function[] = bandpassfilter () % komponen
w = logspace(0,4,500);
I = -(R2*C1*j*w)./((R2*C2*j*w+1).*(R1*C1*j*w+1)); J = -(R3*C1*j*w)./((R3*C3*j*w+1).*(R1*C1*j*w+1)); H = I+J;
b = abs(H); C = 20*log10(b); D = angle(H)*180/pi; figure;
subplot(2,1,1);
box off; grid on;
ylim([min(C) max(C)]); xlim([0 w(end)]); subplot(2,1,2);
h = semilogx(w,D ,'r'); set(h,'LineWidth',1.4);
ylabel('\angleH(j\omega) (Deg)'); %box off;
grid on;
ylim([min(D) max(D)]); xlim([0 w(end)]);
xlabel('Frekuensi (rad/s)');
Untuk GS diatas di gabung dengan GS 5( GStotal)=
function[] = bandpassfilter () % komponen
C2 = 22e-9;
w = logspace(-2,4,500);
I = -(R2*C1*j*w)./((R2*C2*j*w+1).*(R1*C1*j*w+1)); J = -(R3*C1*j*w)./((R3*C3*j*w+1).*(R1*C1*j*w+1)); K = (R2*C1*j*w)./((R2*C1*j*w+1));
H = (I+J)+K; b = abs(H); C = 20*log10(b); D = angle(H)*180/pi; figure;
subplot(2,1,1);
h = semilogx(w,C ,'r'); set(h,'LineWidth',1.4); ylabel('|H(j\omega)| (dB)'); title('Bandpass Filter'); box off; set(h,'LineWidth',1.4);
ylabel('\angleH(j\omega) (Deg)'); %box off;
grid on;
ylim([min(D) max(D)]); xlim([0 w(end)]);