Fakultas Ilmu Komputer
2070
Sistem Notifikasi Kondisi Angin Menggunakan Metode
Fuzzy
untuk
Keselamatan Pelayaran
Kresna Wiska Kafila1, Dahnial Syauqy2, Tibyani3
Program Studi Teknik Komputer, Fakultas Ilmu Komputer, Universitas Brawijaya Email: 1[email protected], 2[email protected] 3[email protected]
Abstrak
Kecelakaan kapal menjadi masalah yang selalu terjadi setiap tahunnya. Dari data investigasi kecelakaan pelayaran – KNKT tahun 2010-2016 tercatat 337 korban meninggal dan 474 korban luka – luka. Data tersebut belum termasuk nelayan kecil yang tidak terdaftar dan terdata. Faktor yang menyebabkan terjadinya kecelakaan laut adalah kondisi angin yang kencang. Angin kencang tersebut mengakibatkan peningkatan tinggi gelombang laut. Pada penelitian ini menggunakan 2 parameter yaitu kecepatan angin dari modul rotary encoder dan arah angin dari modul dual axis. Parameter tersebut kemudian diolah menggunakan metode fuzzy. Hasil keluaran dari sistem adalah notifikasi tingkat keselamatan berdasarkan pembacaan parameter yaitu aman, waspada dan berbahaya. Berdasarkan pengujian, sistem ini memiliki tingkat akurasi 95,37% pada kecepatan angin, memiliki rata – rata perbedaan derajat 4,29018o pada arah angin, serta memiliki kesesuaian antara keluaran fuzzy sistem
dengan keluaran yang diharapkan.
Kata kunci: arah angin, fuzzy , kecelakaan kapal, kecepatan angin, keselamatan nelayan
Abstract
A ship accident is an issue that happens every year. From the investigation data of cruise accident – KNKT 2010-2016 recorded 337 victims died and 474 wounded. The data does not include unregistered and unrecorded fishermen. Factors that cause the occurrence of cruise accidents is a strong wind conditions. The strong winds causes an increase in sea wave height. In this research using two parameters these are wind speed of the rotary encoder module and wind direction of dual axis module. The parameters are then processed using the fuzzy method. The output of the system is a safety level notification based on parameter readings these are safe, alert and dangerous. Based on testing, the system has an accuracy of 95.37% at wind speed, has an average difference of degree 4,29018o in wind
direction, and has a match result between the fuzzy system output with the expected output.
Keywords: fisherman's safety, fuzzy, ship accident, wind speed, wind direction,
1. PENDAHULUAN
Kecelakaan kapal menjadi masalah yang selalu terjadi setiap tahunnya. Jumlah nelayan yang mengantungkan hidupnya dari berlayar tergolong cukup banyak, mengingat indonesia adalah kepulauan maritim. Banyaknya hasil laut menjadikan mata pencaharian ini akan selalu dieksplorasi. Namun mengingat indonesia memiliki kondisi angin yang berubah – ubah, menjadikan risiko kecelakaan kapal dan nelayan meningkat. Dari data investigasi kecelakaan pelayaran – KNKT tahun 2010-2016 tercatat 337 korban meninggal dan 474 korban luka – luka. Data tersebut belum termasuk nelayan kecil
yang tidak terdaftar dan terdata. (Investigasi, 2016)
Akibat yang ditimbulkan dari permasalahan ini adalah meningkatnya jumlah korban serta kapal yang mengalami kecelakaan. Dengan meningkatnya jumlah angka kecelakaan maka tingkat keamanan dan keselamatan akan menurun. Dari sisi nelayan ikan, hal tersebut akan berdampak pada penurunan produktivitas. Hal tersebut tentu sangat merugikan dan membuat kegiatan nelayan menjadi tidak aman dan tidak efektif.
Nelayan biasanya mendapatkan pengumuman dari BMKG terkait dengan keadaan cuaca serta kondisi angin dan tinggi gelombang, namun dengan sistem seperti itu maka informasi tidak tersampaikan secara real time. Akan lebih mudah kalau nelayan mengetahui secara langsung kondisi yang terjadi sebelum berlayar. Oleh karena itu diperlukan sebuah alat yang dapat mengetahui kondisi serta menentukan tingkat keamanan untuk melakukan aktivitas di laut.
Penelitian sebelumnya yang dilakukan oleh Prima Nadia yaitu pengaruh angin terhadap tinggi gelombang pada struktur bangunan breakwater di tapak paderi kota bengkulu. Dalam penelitian ini menghasilkan hubungan antara kecepatan angin dengan tinggi gelombang. Data yang diambil adalah data yang telah didapatkan dari BMKG berupa data sekunder. (Prima Nadia, 2013)
Penelitian lain juga dilakukan oleh Dzulkarnain dengan judul rancang bangun sistem monitoring kecepatan angin dan arah angin untuk sistem kepelabuhanan. Dalam penelitian tersebut menghasilkan rangkaian sistem monitoring kecepatan dan arah angin yang digunakan untuk sistem perkelabuhan, dengan tingkat kesalahan 0,35% dibandingkan anemometer model AM-4221. (Dzukarnain, 2016)
Penelitian lainnya yang berkaitan dengan klasifikasi pernah dilakukan adalah sistem monitoring luapan air pada selokan menggunakan metode fuzzy yang dilakukan oleh Aulia. Sistem ini dapat memonitoring selokan yang meluap dengan menggunakan sensor ultrasonik untuk mendeteksi ketinggian air dan sensor G1/2 untuk mengetahui kecepatan air. (Anwar, 2017)
Berdasarkan kemiripan usur yang diteliti, maka metode ini dijadikan sebagai metode dasar untuk menghasilkan keluaran yang dihasilkan dari beberapa unsur masukan. Berdasarkan semua latar belakang yang sudah dijelaskan sebelumnya, maka dari itu peneliti berencana
untuk melakukan penelitian yang berkaitan dengan keselamatan pelayaran dengan menggunakan metode fuzzy.
2. PERANCANGAN DAN IMPLEMENTASI
Pada tahap perancangan terbagi menjadi dua bagian, yaitu perancangan perangkat keras dan perancangan perangkat lunak.
Perancangan perangkat keras meliputi, pembuatan skema rangkaian dan desain perancangan prototipe sistem, sedangkan pada perancangan perangkat lunak meliputi perancangan proses fuzzy serta perancangan keluaran pada android. Diagram blok yang digunakan sebagai perancangan perangkat keras daat dilihat pada Gambar 1.
Gambar 1. Diagram Blok
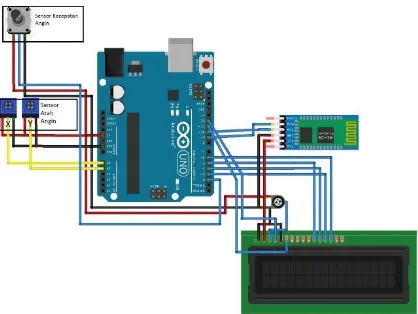
Perangkat keras yang digunakan pada sistem ini adalah Arduino Uno sebagai mikrokontroller. Input yang digunakan adalah modul rotary encoder dan modul dual axis. Modul rotary encoder digunakan untuk mengetahui kecepatan angin sedangkan modul dual axis digunakan sebagai penunjuk arah angin. Gambaran perancangan pin sistem dapat dilihat pada Gambar 2 berikut.
Gambar 2. Skema Perancangan Perangkat Keras
Tabel 1. Koneksi Pin Perangkat Keras
Perancangan perangkat lunak pada sistem ini dilakukan di Arduino IDE dan App Inventor. Pada Arduino IDE code dibuat untuk dapat membaca, mengolah dan menentukan keluaran pada sistem. Pada pembacaan sensor code dibuat untuk dapat mengambil data dan mengubah data menjadi data yang sesuai dengan sistem. Pada modul rotary encoder data digital dari inframerah dirubah menjadi data kecepatan dengan satuan knot. Sedangkan pada modul dual axis data berupa hasil potensiometer yang merupakan data analog yang harus dikonversi menjadi data digital. Pada bagian keluaran modul bluetooth HC-05 digunakan sebagai media transmisi yang menghubungkan bluetooth dan android.
Implementasi fuzzy sugeno pada sistem memerlukan beberapa library. Library digunakan untuk dapat menjalankan sistem sesuai dengan perancangan sebelumnya. Library pertama yang digunakan adalah library timeone yang berguna untuk mengubah data masukan modul rotary encoder menjadi kecepatan. Sedangkan proses fuzzifikasi dimulai dari menentukan himpunan anggota input dan output fuzzy. Setelah itu penentuan rule yang sudah ditentukan. Bagian akhir dari fuzzy adalah defuzzifikasi. Hasil dari defuzzifikasi tersebut kemudian dikirim untuk menjadi data output pada LCD dan bluetooth.
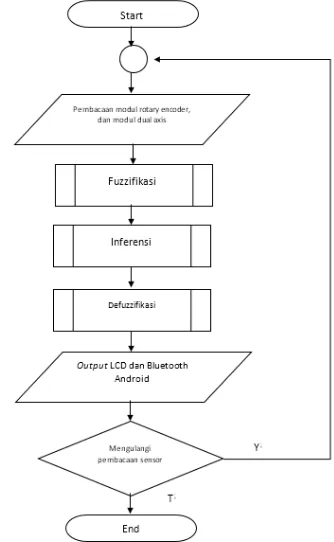
Penerapan metode fuzzy pada sistem ini menggunakan beberapa proses sampai mendapatkan hasil keluaran yang diinginkan. Proses fuzzy sama dengan perhitungan secara manual. Terdiri dari pembuatan himpunan input dan output, pembuatan rule, inferensi, dan defuzifikasi. Proses fuzzy merupakan sebuah proses yang berurutan dan tidak dapat dijalankan
tanpa hasil dari proses sebelumnya. Gambar 3 merupakan proses yang terjadi pada fuzzy.
Gambar 3. Alur Sistem Logika Fuzzy
Fuzzyfikasi merupakan proses merubah bilangan real menjadi fungsi keanggotaan fuzzy. Pada proses ini masukan dan keluaran dijabarkan menjadi sebuah fungsi keanggotaan. Pada keluarannya terbagi menjadi aman, waspada dan bahaya.
Variabel kecepatan angin memiliki 4 himpunan fuzzy, yaitu tidak berangin, pelan, sedang, dan kuat. Gambar 4 merupakan representasi mengenai fungsi keanggotaan dari variabel kecepatan angin.
Gambar 4. Fungsi Keanggotaan Variabel Kecepatan Angin
Gambar 5. Fungsi Keanggotaan Variabel Arah Angin
Pada proses fuzzy perlu dibuat beberapa aturan yang dsebut rule. Rule berisi beberapa kondisi yang mungkin terjadi beserta reaksi dari adanya kondisi tersebut. Rule yang digunakan pada sistem ini ada pada Tabel 2 berikut.
Tabel 2. Aturan Fuzzy
Defuzzifikasi merupakan proses yang dilakukan setelah melakukan implikasi dan mendapatkan nilai α. Setelah mendapat niali α, nilai tersebut dipetakan pada himpunan keluaran. Dengan menggunakan metode height method yaitu dengan mengambil nilai yang mimiliki keanggotaan terbanyak dan menjadikannya sebagai keluaran fuzzy.
Contoh dari penerapan deffuzifikasi adalah sebagai berikut.
aman = max(rule0, rule1, rule2, rule3)
waspada = max(rule4, rule5, rule6, rule7)
bahaya = max(rule8, rule9, rule10, rule11)
Defuzzifikasi=max(aman,waspada,bahaya)
Keluaran sistem menggunakan bluetooth akan dikoneksikan ke perangkat android. Perangkat android ini nanti akan menampilkan data berupa kecepatan angin, arah angin, dan keluaran dari hasil defuzzifikasi. Aplikasi android dibuat menggunakan appinventor2. Pengguna nantinya akan memilih perangkat bluetooth sistem dan kemudian terkoneksi.
Setelah terkoneksi maka data akan dikirim menggunakna komunikasi serial.
Setelah tahap perancangan selanjutnya tahap implementai. Implementasi dilakukan sesuai dengan perancangan yang sudah dilakukan sebelumnya. Implementasi pada perangkat keras dapat dilihat pada Gambar 6.
Gambar 6. Implementasi Perangkat Keras Sistem
Sedangkan implementasi perangkat lunak keluaran pada android sistem dapat dilihat pada Gambar 7.
Gambar 7. Implementasi Perangkat Lunak Keluaran Pada Android
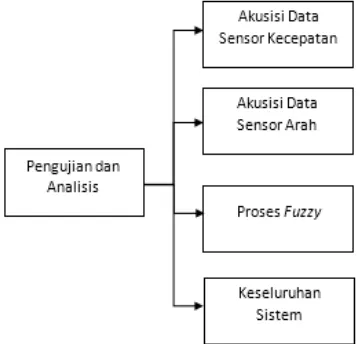
3. PENGUJIAN DAN ANALISIS
Gambar 8. Pohon Pengujian dan Analisis
3.1 Pengujian Akusisi Data Sensor Kecepatan
Tujuan dari dilakukannya pengujian ini adalah menguji data yang diambil dari sensor kecepatan yaitu modul rotaryencoder. Keluaran yang dihasilkan dari pembacaan sensor adalah 1 dan 0 yang kemudian dirubah menjadi satuan knot. Pengujian dilakukan dengan menggunakan kipas angin.
Pengujian dilakukan menggunakan kipas angin sebagai acuan kecepatan dan menggunakan anemometer sebagai pembanding kecepatan angin. Hasil dari pengujian akusisi data sensor kecepatan angin dapat dilihat pada Tabel 3 berikut.
Tabel 3. Hasil Pengujian Sensor Kecepatan Angin
Pada Tabel 3 dapat diketahui bahwa sensor berhasil menangkap kecepatan angin yang dihasilkan oleh kipas angin. Sensor dapat menangkap data dengan perbedaan yang tidak jauh dari anemometer. Dari data yang ada pada
Tabel 3 dapat dilihat error rata-rata yang dimiliki prototype adalah sebesar 4,63%.
3.2 Pengujian Akusisi Data Sensor Arah Angin
Tujuan dari pengujian ini adalah mengetahui hasil dari pembacaan modul dual axis, serta mengetahui nilai error yang terjadi pada saat pengujian. Hasil dari pembacaan sensor akan dibandingkan dengan nilai derajar yang sebenarnya. Penjelasan lebih lengkap dapat dilihat pada bagian prosedur.
Pada pengujian data sensor arah angin ini, akan dilakukan dengan cara menempatkan prototype ditengah 8 arah angin. Setiap 45o akan
dibuat sebuah garis yang mewakili satu arah angin yang lurus dari prototype menuju kipas angin. Data yang akan diambil adalah data koordinat dari X dan Y serta hasil keluaran sensor berupa arah angin. Data tersebut nantinya akan dibandingkan dengan derajat dan nilai dari arah angin yang sudah tentukan. Berikut ini merupakan hasil dari pengujian yang dilakukan pada akusisi data arah angin pada tabel 4.2 berikut.
Tabel 4. Hasil Pengujian Sensor Kecepatan Angin
yang dikeluarkan oleh sistem. Rata – rata perbedaan derajat adalah 4,29018o.
3.3 Pengujian Proses Fuzzy
Pada pengujian ini dilakukan pengujian terhadap metode fuzzy yang digunakan pada sistem. Fuzzy yang digunakan pada sistem adalah fuzzy sugeno. Tujuan dari pengujian ini adalah untuk mengetahui hasil dari keluaran nilai fuzzy dari sistem dan keluaran fuzzy dari nilai keluaran yang diharapkan.
Pada pengujian ini, prosedur yang dilakukan adalah melakukan input secara manual tanpa menggunakan sensor pada sistem. Hasil dari keluaran sistem nantinya akan dibandingkan dengan hasil keluaran yang diitung menggunakan perhitungan manual. Pengambilan data dilakukan sebanyak 12 kali yang mewakili setiap kondisi pada rule yang telah dibuat pada aturan fuzzy.
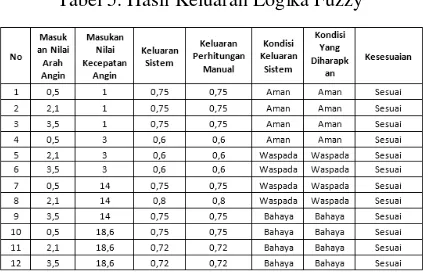
Berikut ini adalah hasil dari pengujian proses fuzzy yang dilakukan oleh sistem pada Tabel 5.
Tabel 5. Hasil Keluaran Logika Fuzzy
Pada hasil dari pengujian ini yang ada pada Tabel 5 dapat dilihat keluaran dari kedua pengujian, yaitu keluaran dari sistem dan hail dari perhitungan manual. Hasil dari keluaran sistem memiliki nilai yang sama dengan hasil dari perhitungan manual. Dengan demikian maka sistem sudah sesuai dalam melakukan perhitungan fuzzy. Dengan menggunakan 12 masukan yang memiliki kondisi yang berbeda, sistem dapat memberikan hasil keluaran yang sama dengan keluaran yang diharapkan.
3.4 Pengujian Keseluruhan Sistem
Tujuan dari dilakukanny apengujian ini adalah untuk menguji keseluruhan kerja sistem. Yaitu dengan mengkondisikan sistem dengan kejadian yang mungkin terjadi pada kondisi nyata lingkungan prototype.
Pada pengujian ini sistem akan diberikan masukan dari sensor dan nantinya akan didihitung oleh perhitungan fuzzy yang dilakukan oleh sistem. Hasil akhir dari perhitungan tersebut akan dibandungkan dengan perhitungan manual. Perbedaan pengujian ini dan pengujian logika fuzzy sebelumnya adalah pada pengujian ini masukan yang digunakan berasal dari sensor dan bukan masukan secara manual seperti pada pengujian sebelumnya. Berikut ini adalah hasil dari pengujian proses fuzzy yang dilakukan oleh sistem pada Tabel 6.
Tabel 6. Hasil Pengujian Keseluruhan Sistem
Pada Tabel 6 terdapat hasil dari pengujian yang dilakukan pada sistem. Sistem menggunakan data masukan dari sensor dan mengolah data masukan tersebut pada proses fuzzy dan menghasilkan keluaran berupa notifikasi. Pembacaan sensor arah angin yang dilakukan pada sistem sesuai dengan arah angin yang diharapkan. Sedangkan pengujian terhadap kecepatan angin memiliki perbedaan antara hasil pembacaan sensor dan hasil pengukurna menggunakan anemometer, namun perbedaan tersebut tidak signifikan. Sedangkan pada hasil pengolahan fuzzy, hasil yang dikeluarkan oleh sistem memiliki hasil yang berbeda pada pengujian 3. Hal tersebut terjadi karena pada saat pengujian dilakuakn terdapat perbedaan pembacaan pada kecepatan angin, sehingga nilai fuzzy sistem berbeda dengan nilai pada saat perhitungan manual.
4. KESIMPULAN
Setelah melakukan pembuatan dan pengugujian pada sistem notifikasi kondisi angin menggunakan metode fuzzy untuk keselamatan pelayaran, dapat diambil kesimpulan dan saran yang dapat digunakna untuk pengembangan penelitian selanjutnya. Kesimpulan penulis antara lain sebagai berikut.
menggunakan rotary encoder optocoupler sebagai pembacaan putaran yang dihasilkan oleh angin. Hasil keluaran sistem kemudian dibandingkan dengan hasil dari pembacaan anemometer untuk dapat mengetahui tingkat akurasi sensor. Pada hasil pengujian hasil dari pembacaan sensor memiliki tingkat error 4,63% saat dibandingkan dengan anemometer setelah melakukan pengujian pada beberapa kondisi. Dengan demikian maka sensor memiliki tingkat akurasi sebesar 95,37%.
2. Proses yang dilakukan pada perancangan pembacaan arah angin adalah dengan menggunakan modul dual axis sebagai arah angin yang dihasilkan oleh angin. Sensor ini menggunakan dua buah potensio yang masing – masing berfungsi sebagai sumbu x dan y. Arah angin terbagi dalam beberapa kondisi yaitu depan, serong depan, samping, serong belakang, dan belakang. nilai tersebut yang nantinya digunakan untuk masukan pada saat sistem menjalankan fuzzy. Pada saat dilakukan pengujian, sistem menghasilkan keluaran yang sesuai dengan arah angin yang diharapkan. Namun sistem memiliki perbedaan derajat dengan derajat arah yang diharapkan. Rata – rata dari perbedaan tersebut adalah 4,29018o.
3. Pada proses perancangan fuzzy pada sistem, sistem menggunakan fuzzy sugego. Proses fuzzy dimulai dari fuzzifikasi, inferensi, dan defuzzifikasi. Sistem menggunakan dua masukan berupa arah angin dan kecepatan angin. Pada masukan arah angin, masukan ini memiliki 3 himpunan yaitu depan samping dan belakang. sedangkan pada masukan keceatan angin memiliki 4 himpunan, yaitu tidak berangin, pelan, sedang dan kuat. Keluaran dari fuzzy ini adalah sebuah peringatan aman, waspada atau bahaya. Pada fuzzy ini memiliki rule sebanyak 12. Hasil dari keluaran sistem adalah nilai fuzzy dan peringatan dengan nilai keanggotaan tertinggi. Perbandingan antara hasil keluaran sistem dan hasil dari perhitungan manual memiliki nilai error 0%, sehingga sistem memiliki keluaran yang sama dengan perhitungan manual. Dengan demikian maka sistem berhasil melakukan implementasi metode fuzzy.
DAFTAR PUSTAKA
Anwar, A. T. W., 2017. Implementasi Sistem Monitoring Luapan Air Pada Selokan Menggunakan Metode Fuzzy. Malang: Fakultas Ilmu Komputer Universitas Brawijaya.
Dean Rudityo Aji, M. N. C., 2015. Analisa Karakteristik Kecepatan Angin dan Tinggi Gelombang Menggunakan Data Satelit Altimetri. Surabaya: Institut Teknologi Sepuluh Nopember.
Dzukarnain, 2016. Rancang Bangun Sistem Monitoring Kecepatan Angin Dan Arah Angin Untuk Sistem Kepelabuhanan, Tanjungpinang: Universitas Maritim Raya Ali Haji.
Ery Safrianti, F. H. S., 2010. Perancangan Alat Ukur Kecepatan dan Arah Angin. Pekanbaru: Jurusan Elektro Fakultas Teknik Universitas Riau.
Gatut Susanta, H. S., 2011. Akankah Indonesia Tengelam Akibat Pemanasan Global. Jakarta: Penebar Plus.
Haerani, E., 2014. Analisa Kendali Logika Fuzzy
Dengan Metode Defuzzifikasi Coa
(Center Of Area), Bisektor, Mom (Mean
Of Maximum), Lom (Largest Of
Maximum), Dan Som (Smallest Of Maximum). Pekanbaru: Universitas Islam Negeri Sultan Syarif Kasim Riau.
Hanifan, A., 2011. Perancangan Sistem Informasi Cuaca Maritim Untuk Para Nelayan Jawa Timur Dengan Media Komunikasi Short Message Service, Surabaya: Department of Engineering Physics, Faculty of Industrial Technology ITS Surabaya Indonesia .
Investigasi, K. S. K., 2016. Data Investigasi Kecelakaan Pelayaran Tahun 2010-2016, Jakarta: Komite Nasional Keselamatan Transportasi.
Lizda Iswari, F. W., 2005. Alat Bantu Sistem Inferensi Fuzzy Metode Sugeno Orde
Informatika, Fakultas Teknologi Industri, Universitas Islam Indonesia.
Moh Ibnu, M., 2009. Belajar Mikrokontroller
PIC16F84. Yogyakarta: Gava Media
Yogyakarta.
Prima Nadia, M. A. B., 2013. Pengaruh Angin
Terhadap Tinggi Gelombang Pada
Struktur Bangunan Breakwater di Tapak
Paderi Kota Bengkulu. Bengkulu:
Fakultas Teknik UNIB.
Ratna Dewi, A. P., 2013. Pendugaan Tinggi
Gelombang Berdasarkan Kecepatan
Angin Pada Zona Alur Pelayaran
Diperairan Tanjungpinang,
Tanjungpinang: Universitas Maritim Raja Ali Haji.
Sari, N. E., 2011. Prediksi Cuaca Berbasis
Logika Fuzzy Untuk Rekomendasi