78
DISAIN ALGORITMA
MODEL PREDICTIVE CONTROL (MPC) PENGENDALIAN
SISTEM TATA UDARA PRESISI
Nana Sutarna
Jurusan Teknik Elektro , Politeknik Negeri Jakarta Email : [email protected]
ABSTRACT
The model system of precision air condition is modeled as a multivariable system with two outputs namely temperature and humidity and two inputs namely motor rotation speed and valve opening. In this model there is a problem of coupling between the input and output. Model Predictive Control (MPC) is one way to overcome the problem of coupling in multivariable systems. MPC controllers are designed without the constraints to determine a reliable algorithm. From the simulation results it appears that the controlling parameters is best horizon Hp = 10, Hu = 4, the weighting matrix R = 0.1, and Q = 3. With this parameter the output response follow the set point signal
Keywords: Precision Air Systems Administration, MPC, Hp, Hu, Q and R
ABSTRAK
Model sistem tata udara presisi dimodelkan sebagai sebuah sistem multivariable dengan dua output yaitu temperature dan kelembaban dan dua input yaitu kecepatan putaran motor dan bukaan valve. Pada model ini ada masalah coupling diantara input dan outputnya. Model Predictive Control (MPC) adalah salah satu cara untuk mengatasi masalah coupling dalam sistem multivariable. Pengendali MPC dirancang tanpa constraints untuk menentukan agoritma yang handal. Dari hasil simulasi nampak bahwa parameter-parameter pengendali yang terbaik adalah horizon Hp=10, Hu=4, matrik pembobotan R=0.1, dan Q=3. Dengan parameter ini respon keluarannya mengikuti sinyal set point
Nana Sutarna, Disain Algoritma Model…
79
PENDAHULUAN
Mayoritas peralatan informasi teknologi searusnya ditempatkan pada ruang khusus yang tidak dipengaruhi oleh fluaktuatif suhu lingkungan. Oleh karena itu biasanya peralatan tersebut berada di suatu ruangan yang disebut ruang datacom. Dampak yang timbul dari kondisi suhu dan kelembaban udara yang fluktuatif pada ruang datacom sangat rentan terhadap
thermal shutdown, corrosion dan short circuit yang dapat menyebabkan kerusakan pada peralatan. Untuk itu diperlukan pengendalian yang optimal pada sistem tata ruang udara yang presisi agar kelembaban dan suhu di dalam ruang
datacom dapat dijaga konstan.
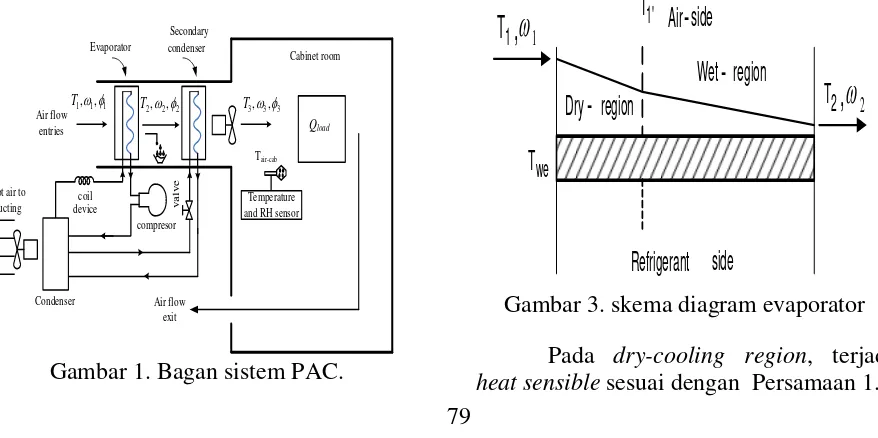
Precision Air Conditioning (PAC) atau sistem tata udara presisi menghasilkan dua keluaran yang harus dijaga konstan yaitu suhu dan kelembaban, yang berasal dari dua variabel masukan antara lain putaran motor kompressor dan bukaan katup aliran refrigerant, sistem ini adalah multivariabel yang dikenal dengan istilah MIMO (Multiple Input Multi Output).
1) Gambaran Blok Diagram PAC
PAC untuk sistem peralatan telekomunikasi dikondisikan pada suhu (T) 220C dan kelembabannya () 50%. Sistem kerja PAC mengacu ke sistem kerja refrigerator, seperti terlihat pada Gambar 1.
Evaporator
Secondary condenser
Temperature and RH sensor Air flow
Gambar 1. Bagan sistem PAC.
Model matematik untuk sistem PAC secara umum terbagi dua yaitu prinsip konservasi energi dan konservasi massa. Mengacu pada Gambar 2 diasumsikan suhu udara T2
dan moisture content 2 yang dihasilkan oleh evaporator bercampur sempurna dengan udara dan meninggalkan koil pendingin. Kemudian suhu udara T3 dan
moisture content 3 yang meninggalkan kondenser sekunder merupakan hasil proses panas pada suhu ruang lemari.
Evaporator
Gambar 2. Model suhu dan kelembaban pada kondenser sekunder
a) Model Evaporator
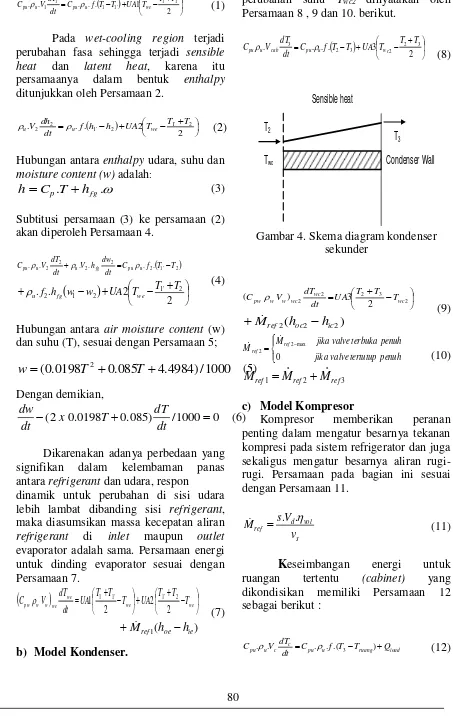
Pada bagian evaporator wilayah suhu terbagi dua, yaitu dry-cooling region dan
wet-cooling region, seperti ditunjukkan oleh Gambar 3.
T
1'T
1,
T
2,
Wet
-
region
Dry
-
region
T
weGambar 3. skema diagram evaporator Pada dry-cooling region, terjadi
80
Pada wet-cooling region terjadi perubahan fasa sehingga terjadi sensible heat dan latent heat, karena itu persamaanya dalam bentuk enthalpy
ditunjukkan oleh Persamaan 2.
Hubungan antara enthalpy udara, suhu dan
moisture content (w) adalah:
akan diperoleh Persamaan 4.
1' 2 dan suhu (T), sesuai dengan Persamaan 5;
1000
Dengan demikian,
0
Dikarenakan adanya perbedaan yang signifikan dalam kelembaman panas antara refrigerant dan udara, respon
dinamik untuk perubahan di sisi udara lebih lambat dibanding sisi refrigerant, maka diasumsikan massa kecepatan aliran
refrigerant di inlet maupun outlet
evaporator adalah sama. Persamaan energi untuk dinding evaporator sesuai dengan Persamaan 7.
b) Model Kondenser.
Mengacu pada Gambar 4 di bawah , perubahan suhu Twc2 dinyatakan oleh
Persamaan 8 , 9 dan 10. berikut.
Twc Condenser Wall
Gambar 4. Skema diagram kondenser sekunder
c) Model Kompresor
Kompresor memberikan peranan penting dalam mengatur besarnya tekanan kompresi pada sistem refrigerator dan juga sekaligus mengatur besarnya aliran rugi-rugi. Persamaan pada bagian ini sesuai dengan Persamaan 11.
s
Keseimbangan energi untuk ruangan tertentu (cabinet) yang dikondisikan memiliki Persamaan 12 sebagai berikut :
Nana Sutarna, Disain Algoritma Model…
81 dimana V adalah volume ruang cabinet,
load
Q adalah beban sensible di ruang
cabinet.
W W
Mf dt dW
Vc u
u 3 4
4
. .
.
(13)dimana M adalah beban uap lembab yang dihasilkan di ruang cabinet.
Permasalahan yang ada pada sistem multivariable diantaranya variabel masukan saling mempengaruhi terhadap keadaan keluarannya., kondisi ini akan berpengaruh terhadap nilai acuan yang diharapkan. Pengendali Model Predictive Control (MPC) merupakan adalah salah satu pengendali yang mampu mengatasi permasalahan tersebut. MPC banyak digunakan pada bidang industri karena mempunyai kelebihan dan mampu mengatasi pengendalian pada kondisi keadaan variable yang kompleks dibandingkan dengan pengendali konvensional
2) Prisnip Dasar MPC
Model Predictive Control (MPC) atau sistem kendali prediktif termasuk dalam konsep perancangan pengendali berbasis model proses, dimana model proses digunakan secara eksplisit untuk merancang pengendali dengan cara meminimumkan suatu fungsi kriteria. Struktur dasar dari pengendali MPC dapat dilihat pada Gambar 5. Metodologi semua jenis pengendali yang termasuk kedalam kategori MPC dapat dikenali oleh strategi berikut:
a) Keluaran proses yang akan datang untuk rentang horizon Hp yang ditentukan yang dinamakan sebagai
prediction horizon, diprediksi pada setiap waktu pencuplikan dengan menggunakan model proses.
b) Serangkaian sinyal kendali dihitung dengan mengoptimasi suatu fungsi kriteria yang ditetapkan sebelumnya. Fungsi kriteria tersebut umumnya berupa suatu fungsi kuadratik dari kesalahan antara sinyal keluaran terprediksi dengan trayektori acuan.
c) Sinyal kendali u(k|k) dikirim ke proses, sedangkan sinyal kendali terprediksi berikutnya dibuang, karena pada pencuplikan berikutnya y(k+1)
sudah diketahui nilainya.
Model
Optimizer
Masukan yang Akan Datang Masukan dan Keluaran
Lampau TerprediksiKeluaran
Trayektori Acuan
Kesalahan Prediksi Constraint Fungsi Kriteria
+
-Gambar 5. Struktur Pengendali MPC
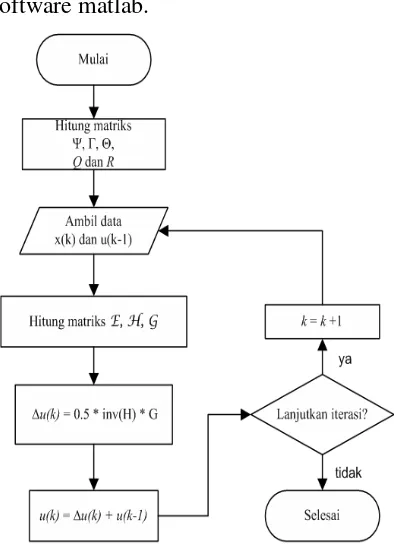
METODOLOGI.
Pola diagram alir dalam perhitungan kendali perhitungan udara presisi pada MPC ditunjukkan pada Gambar 6, dengan tools mengunakan software matlab.
82
a) Pengendalian dengan perubahan
nilai Prediction Horizon (Hp).
Bentuk grafik hasil pengendalian MPC dengan nilai Prediction Horizon (Hp), yang berbeda dapat ditunjukkan pada Gambar 7(a) ,7(b) dan 7(c)
Gambar 7(a) Sinyal keluaran y1 dan y2 dengan parameter Hp=4; Hu=2; Q=1;
R=1.
Gambar 7(b). Sinyal keluaran y1 dan y2 pada dengan parameter Hp=10;
Hu=2; Q=1; R=1.Hp=10
Gambar 7 ( c) . Sinyal keluaran y1 dan y2 dengan parameter , Hp=20; Hu=2; Q=1;
R=1.pada Hp=20
Jika nilai Hp diperbesar terus maka sinyal output akan dinaikkan terus sampai menuju nilai set point yang ditetapkan. Seperti tampak pada keluaran y1. Sebaliknya jika keluaran sudah mencapai nilai set point, tetapi jika nilai Hp terus diperbesar, maka nilai keluaran dipaksa di tekan pada nilai set point nya. Hal ini dapat dilihat pada keluaran y2.
Jika pengamatan di fokuskan pada keluaran y1 dengan perubahan nilai Hp yang semakin diperbesar, nampak waktu naiknya (rise time) semakin diperbaiki. Pada saat Hp=4 waktu naik sekitar 60 detik dan pada saat Hp=10 waktu naiknya semakin cepat sebesar 15 detik.
Nana Sutarna, Disain Algoritma Model…
83
b) Pengendalian dengan perubahan
Nilai Control Horizon (Hu)
Gambar Grafik perbandingan hasil Pengendalian MPC, dengan perubahan Perbedaan Nilai Control Horizon (Hu), dapat ditunjukkan oleh Gambar 8(a), 8(b) dan 8(c).
Gambar 8 (a) Sinyal kendali u1 dan u2 Dengan parameter Hu=4; Hp=10; Q=1;
R=1.
Gambar 8 (b) Sinyal kendali u1 dan u2 dengan parameter Hu=8; Hp=10; Q=1;
R=1.
Jika dibandingkan Gambar 8(a) dengan Gambar 8(b) perhatikan sinyal kendali u1.
Sinyal kendali u1 nampak semakin lebih halus, dan pada sisi keluaran y2 juga ada peredaman keluaran terhadap nilai seting pointnya jika bilai Hu terus diperbesar.
c) Pengendalian dengan perubahan
Matriks Bobot R
Perbandingan hasil pengendalian MPC dengan perubahan bobot matriks R dapat ditunjukkan oleh gambar 9(a),9(b) dan 9(c).
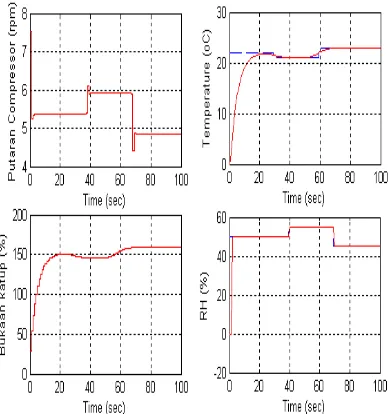
Gambar 9 (a). Grafik keluaran dengan parameter R= 0.5; Hp=10; Hu=4; Q=1;
Gambar 9(b) Grafik keluaran dengan parameter b. R= 0.1; Hp=10; Hu=4;
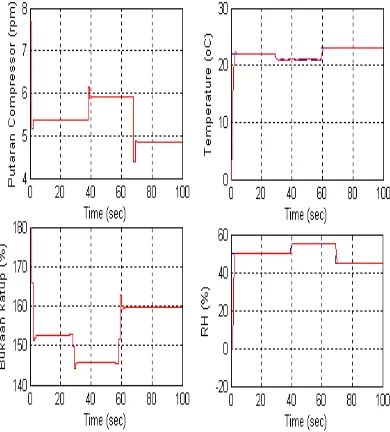
84 Gambar 9(c). Grafik keluaran dan
masukan pada R=0.05
Bandingkan Gambar 8(a) dengan Gambar 9(c) perubahan yang nampak jelas adalah pada keluaran y1, respon rise time keluarannya lebih cepat. Sedang keluaran y2 nampak diredam dan dipertahankan pada nilai acuannya. Jika bobot matriks R terus diperkecil lagi, response rise time nya semakin halus.
d) Pengendalian dengan perubahan
Matriks Bobot Q
Perbandingan hasil pengendalian MPC Dengan perubahan Matriks Bobot Q, dapat ditunjukkan oleh Gambar 10(a) dan 10(b).
Gambar 10(a). Grafik Keluaran dengan parameter Q=3; R= 0.1; Hp=10; Hu=4;
Gambar 10 (b) Garfik keluaran dengan parameter Q=5; R= 0.1; Hp=10; Hu=4
Jika dibandingkan Gambar 9(a) dan 10(b) dengan Gambar 10(b) respon kecepatan keluaran y1 semakin cepat menuju nilai acuan, sedang keluaran y2 diredam dan dipertahankan pada nilai optimumnya, yaitu pada nilai acuannya. Jika nilai bobot matriks Q diperbesar lagi, pengaruh terhadap keluaran baik y1 maupun y2 tidak begitu signifikan.
KESIMPULAN
Dari hasil pembahasan di atas dapat disimpulkan bahwa, Pengendali MPC dapat meredam overshoot dan sinyal keluaran mengikuti setting point, nilai bobot matrik R dan Q terbaik pada nilai R=0.1 dan Q=3. Kemudian nilai
Prediction Horizon dan Control Horizon
pada model PAC nilai terbaik Hp=10 dan Hu=4.
DAFTAR PUSTAKA.
[1] Yunus A. Cengel, Michael A.Boles,
Thermodynamics: An Engineering Approach, Second edition. (New York: McGraw-Hill, 1994), hal. 693.
Nana Sutarna, Disain Algoritma Model…
85 [3] Lars Finn Sloth Larsen. “Model Based
Control of Refrigeration Systems.”
Ph.D. Thesis, Central R & D Danfoss A/S DK-6430 Nordborg, Denmark November 2005, hal. 2.9 – 2.11.
[4] Potter & Somerton - Chapter 12: Mixtures and Solutions - Part 2 The Psychrometric Chart & Air-Conditioning Processes (Potter - Sections 12.6 & 12.7)
[5] Raul Anton, Hans Jonsson, and Björn Palm, Modeling of air conditioning for cooling of data centers, journal IEEE, 2002 Inter Society Conference on Thermal Phenomena.
[6] Qi Qi, Shiming Deng, Multivariable Control-Oriented Modeling of Direct Expansion (DX) Air Conditioning (A/C) System, International Journal of Refrigeration 2008, Jounal homepage:
www.elsevier.com.
[7] J.Howard A, Jtaylor Beard, Chris Bolton, Simplified Analytical Modeling of an Air Conditioner with Positive Displacement Compressor, journal IEEE, 1996.
[8] C P Underwood, Analysing Multivariable Control of Refrigerantion Plant Using Matlab/Simulink, Seventh International IBPSA Conference, Rio de Janeiro, Brazil, 2001.
[9] Aries Subiantoro, Diktat kuliah system Kendali Adaptif, Control System Research group, Jurusan Elektro FTUI, 2002.
[10] P.E. Wellstead and M.B. Zarrop, Self-Tuning Systems, Control and Signal Processing, 1991, John Willey & Sons, Baffins Lane, Chichester England. [11] Maciejowski, Predictive Control with
Constraints, 2002, Prentice Hall, Harlow England.
[12] Richard J. vaccaro, Digital control A State-Space Approach, 1995, McGraw-Hill, Singapore.