APLIKASI
FUZZY LOGIC
UNTUK PENGENDALI
PENERANGAN RUANGAN BERBASIS MIKROKONTROLER
ATMEGA8535
1. Penjelasan project
Suatu penerangan ruang diperlukan oleh manusia untuk mengenali objek secara visual. Penerangan mempunyai pengaruh terhadap fungsi sebuah ruangan. Oleh karena itu diperlukan lampu sebagai sumber penerangan utama yang dapat menunjang fungsi ruangan. Umumnya untuk pengaturan penerangan ruangan digunakan prinsip on-off. Pengaturan penerangan dengan prinsip on-off hanya berdasarkan pada kondisi gelap terang ruangan, tanpa menghiraukan kontribusi dari luar. Hal ini sering mengakibatkan ketidaknyamanan dan ketidakefisienan penggunaan energi listrik. Oleh karena itu diperlukan pengaturan penerangan yang dihasilkan lampu.
Prinsip kendali yang digunakan adalah kendali fuzzy. Sistem inferensi fuzzy yang digunakan pengendali penerangan ruangan ini adalah Metode Mamdani. Komposisi aturan menggunakan operator OR (union), sedangkan untuk defuzzifikasi digunakan metode MOM (Mean of Maximum). Sebagai pengendali utama pada sistem menggunakan miktokontroller ATmega8535 dengan input dari sensor cahaya (LDR). Output dari pendendali selanjutnya ditampilkan LCD M1632 sebagai penampil dan sebagai input rangkaian pengatur tegangan. Sistem ini bekerja di dalam ruangan (in door) menggunakan maket rumah dengan tiga ruangan sebagai model.
Dalam pengujian perangkat keras dan lunak, diketahui bahwa sistem pengendalian penerangan ruangan ini dapat menghemat energi. Dari pengujian sensor cahaya diperoleh hubungan antara luminansi dan tegangan yang mendekati linier, sehingga pengendalian dengan mikrokontroler ATmega8535 dapat bekerja dengan baik.
DASAR TEORI
1.1. Intensitas Penerangan (Iluminasi)
Intensitas penerangan (E) adalah pernyataan kuantitatif untuk intensitas cahaya (I) yang menimpa atau sampai pada permukaan bidang. Intensitas penerngan disebut pula iluminasi atau kuat penerangan.
Dengan menganggap sumber penerangan sebagai titk yang jaraknya (h) dari bidang penerangan, maka iluminasi (E) dalam lux (lx) pada suatu titik pada bidang penerangan adalah:
Pada skema dibawah ini X sebagai sumber cahaya, sehingga besarnya E pada titik P dan Q adalah:
Gambar 2.1. Skema perumusan iluminasi (E)
1.2. Fuzzy Logic
Fuzzy logic pertama kali dikenalkan kepada publik oleh Lotfi Zadeh, seorang
profesor di University of California di Berkeley. Fuzzy logic digunakan untuk menyatakan hukum operasional dari suatu sistem dengan ungkapan bahasa, bukan dengan persamaan matematis. Banyak sistem yang terlalu kompleks untuk dimodelkan secara akurat, meskipun dengan persamaan matematis yang kompleks. Dalam kasus seperti itu, ungkapan bahasa yang digunakan dalam Fuzzy logic dapat
membantu mendefinisikan karakteristik operasional sistem dengan lebih baik. Ungkapan bahasa untuk karakteristik sistem biasanya dinyatakan dalam bentuk implikasi logika, misalnya aturan Jika - Maka.
Pada teori himpunan klasik yang disebut juga dengan himpunan crisp (himpunan tegas) hanya dikenal dua kemungkinan dalam fungsi keanggotaannya, yaitu kemungkinan termasuk keanggotaan himpunan (logika 1) atau kemungkinan berada di luar keanggotaannya (logika 0). Namun dalam teori himpunan fuzzy tidak hanya memiliki dua kemungkinan dalam menentukan sifat keanggotaannya tetapi memiliki derajat kenaggotaan yang nilainya antara 0 dan 1. fungsi yang menetapkan nilai ini dinamakan fungsi keanggotaan yang disertakan dalam himpunan fuzzy. 2.7.1. Notasi Himpunan Fuzzy
Misalkan U adalah kumpulan obyek yang secara umum dinyatakan dengan {u}. U disebut semesta pembicaraan dan u mewakili elemen-elemen dari U. Suatu himpunan fuzzy F dalam semesta pembicaaraan U dapat direpresentasikan oleh suatu fungsi keanggotaan (membership function) |J,F yang mewakili nilai dalam interval
[0,1 ] untuk tiap u dalam U dinyatakan sebagai \xv = U -> [0,1]
Himpunan fuzzy F dalam U biasanya dinyatakan sebagai himpunan pasangan berurutan u dan derajat keanggotaan.
F = {(u,nf(u))|ueU}... (2.4)
Jika U kontinyu, himpunan fuzzy F dapat ditulis sebagai:
Jika U diskrit, himpunan fuzzy F dinyatakan sebagai:
1.2.1. Operasi Himpunan Fuzzy
Jika A dan B adalah dua buah himpunan Fuzzy dalam semesta pembicaraan
U dengan fungsi keanggotaan |J,A (U) dan |J,B (U), maka pada kedua himpunan Fuzzy
tersebut dapat berlaku operasi : 1. Kesamaan (equality)
Dua buah himpunan Fuzzy A dan B dapat dinyatakan sama jika :
HA(u) = HB(u); untuk semuau EU... (2.7)
2. Gabungan (union)
Fungsi keanggotaan dari gabungan dua buah himpunan Fuzzy A dan B,
HAUB, dapat dinyatakan sebagai :
HAUB(u) = max{|j,A(u),|j,B(u)}; untuk semuau e U... (2.8)
3. Irisan (intersection)
Fungsi keanggotaan dari irisan dua buah himpunan Fuzzy A dan B, [IAHB,
HAnB(u) = min{|j,A(u),|j,B(u)}; untuk semuau G U... (2.9)
4. Komplemen (complement)
dinyatakan sebagai :
1.2.2. Pengendali Fuzzy Logic
Tujuan utama dalam system pengendali adalah mendapatka keluaran (outpu) sebagai respon dari masukan (input). Dalam kendali dengan cara klasik, melibatkan formula-formula matematika yang cukup rumit. Hal ini berbeda dengan kendali fuzzy. Pengendali Fuzzy merupakan suatu sistem kendali yang berdasar pada basis pengetahuan manusia didalam melakukan kendali terhadap suatu proses. Konsep matematika yang mendasari logika fuzzy sangat sederhana dan mudah dimengerti. Pendekatan fuzzy melibatkan aturan-aturan yang dinyatakan dalam kata-kata dan tidak memerlukan presisi yang tinggi serta ada toleransi untuk data yang kurang tepat. Struktur dasar sebuah pengendali Fuzzy diperlihatkan pada Gambar 2.9
.
1.2.3. Fuzzifikasi
Fuzzifikasi yaitu suatu proses untuk mengubah suatu masukan dari bentuk tegas (crisp) menjadi fuzzy (variabel linguistik) yang biasanya disajikan dalam bentuk himpunan-himpunan fuzzy dengan suatu fungsi kenggotaannya masing-masing.
1.2.4. Basis Aturan (Rule Base)
Basis aturan berisi aturan-aturan fuzzy yang digunakan untuk pengendalian sistem. Aturan-aturan ini dibuat berdasarkan logika dan intuisi manusia, serta berkaitan erat dengan jalan pikiran dan pengalaman pribadi yang membuatnya. Jadi tidak salah bila dikatakan bahwa aturan ini bersifat subjektif, tergantung dari ketajaman yang membuat. Aturan yang telah ditetapkan digunakan untuk menghubungkan antara variabel-variabel masukan dan variabel-variabel keluaran. Aturan ini berbentuk 'JIKA - MAKA' (IF - THEN), sebagai contoh adalah : Aturan 1 : JIKA x adalah A1 DAN y adalah B1 MAKA z adalah C1 Aturan 2 : JIKA x adalah A2 DAN y adalah B2 MAKA z adalah C2. Aturan i : JIKA x adalah Ai DAN y
adalah Bi MAKA z adalah Ci Dengan :
Ai (i = 1,2,3,.) adalah himpunan Fuzzy ke i untuk variabel masukan x Bi (i = 1,2,3,.) adalah himpunan Fuzzy ke i untuk variabel masukan y Ci (i = 1,2,3,.) adalah himpunan Fuzzy ke i untuk variabel keluaran z
2. GAMBAR RANGKAIAN DAN PENJELASANNYA
2.1. Mikrokontroler ATmega8535
Mikrokontroller ATmega8535 merupakan mikrokontroller generasi AVR (Alf and Vegard's Risk processor). Mikrokontroller AVR memiliki arsitektur RISC (Reduced Instruction Set Computing) 8 bit, dimana semua instruksi dikemas dalam
Gambar 2.1. Diagram Blok Fungsional ATmega8535 (diambil dari data sheet ATmega8535)
Gambar 2.1. memperlihatkan bahwa ATmega8535 memiliki bagian sebagai berikut
1.Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, dan Port D. 2.ADC 10 bit sebanyak 8 saluran.
3.Tiga buah Timer/Counter dengan kemampuan pembandingan. 4.CPU yang terdiri atas 32 buah register.
5.Watchdog Timer dengan osilator internal. 1. SRAM sebesar 512 byte.
2. Memori Flash sebesar 8 Kb dengan kemampuan Read While Write. 3. Unit interupsi internal dan eksternal.
4. Port antarmuka SPI.
5. EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 512 byte yang dapat diprogram saat operasi.
6. Antarmuka komparator analog.
7. Port USART untuk komunikasi serial dengan kecepatan maksimal 2,5 Mbps. 8. Sistem mikroprosessor 8 bit berbasis RISC dengan kecepatan maksimal 16
MHz.
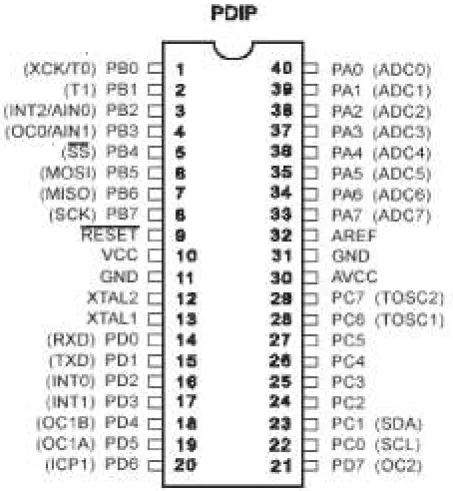
Konfigurasi pin ATmega8535 dapat dilihat pada Gambar 2.18. Secara fungsional konfigurasi pin ATmega8535 sebagai berikut :
1. VCC merupakan pin yang berfungsi sebagai pin masukan catu daya. 2. GND merupakan pin ground.
3. Port A (PA0..PA7) merupakan pin I/O dua arah dan pin masukan ADC.
4. Port B (PB0..PB7) merupakan pin I/O dua arah dan pin fungsi khusus untuk Timer/Counter, Komparator analog, dan SPI.
5. Port C (PC0..PC7) merupakan pin I/O dua arah dan pin khusus untuk TWI, Komparator analog, dan Timer Oscilator.
6. Port D (PD0..PD7) merupakan pin I/O dua arah dan pin khusus untuk Komparator analog, Interupsi eksternal, dan Komunikasi serial.
7. RESET merupakan pin yang digunakan untuk me-reset mikrokontroller. 8. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal.
9. AVCC merupakan pin masukan tegangan untuk ADC. 10. AREF merupakan pin masukan tegangan referensi ADC.
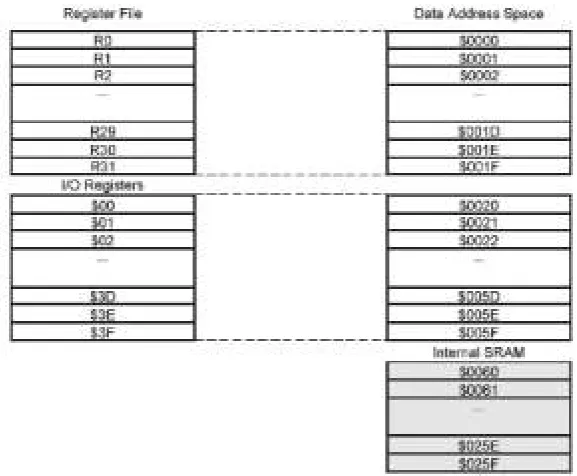
2.2. Peta Memori
ATmega8535 memiliki ruang pengalamatan memori data dan memori
program yang terpisah. Memori data terbagi menjadi 3 bagian, yaitu 32 buah register umum, 64 buah register I/O, dan 512 byte SRAM Internal.
Gambar 2.2. Konfigurasi Memori Data ATmega8535 (diambil dari data sheet ATmega8535)
Memori program yang terletak dalam Flash PEROM tersusun dalam word karena setiap instruksi memiliki lebar 16-bit atau 32-bit. AVR ATmega8535 memiliki 4 Kbyte x 16-bit Flash PEROM dengan alamat mulai dari $000 sampai $FFF. AVR memiliki 12-bit Program Counter (PC) sehingga mampu mengalamati isi Flash.
(diambil dari data sheet ATmega8535)
ATmega8535 juga memiliki memori data berupa EEPROM 8-bit sebanyak 512 byte. Alamat EEPROM dimulai dari $000 sampai $1FF. 2.3.4. Status Register (SREG)
Status Register merupakan register berisi status yang dihasilkan pada setiap operasi yang dilakukan ketika suatu instruksi dieksekusi. SREG merupakan bagian dari inti CPU mikrokontroller.
Gambar 2.22. Status Register ATmega8535 (diambil dari data sheet ATmega8535) a. Bit 7 - I : Global Interrupt Enable
Bit yang harus diset untuk meng-enable interupsi. b. Bit 6 - T : Bit Copy Storage
Instruksi BLD dan BST menggunakan bit-T sebagai sumber atau tujuan dalam operasi bit. Suatu bit dalam sebuah register GPR dapat disalin ke bit T menggunakan instruksi BST, dan sebaliknya bit-T dapat disalin kembali ke suatu bit dalam register GPR menggunakan instruksi BLD.
c. Bit 5 - H : Half Carry Flag d. Bit 4 - S : Sign Bit
Bit-S merupakan hasil operasi EOR antara flag-N (negative) dan flag-V (two's complement overflow).
e. Bit 3 - V : Two's Complement Overflow Flag
Bit akan diset bila suatu operasi menghasilkan bilangan negatif. g. Bit 1 - Z : Zero Flag
Bit akan diset bila hasil operasi yang diperoleh adalah nol. h. Bit 0 - C : Carry Flag
Bit akan diset bila suatu operasi menghasilkan carry.
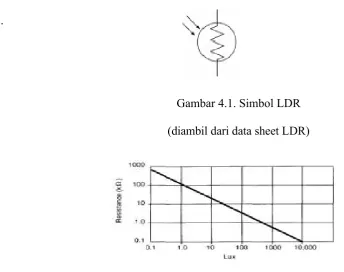
4. LDR
LDR (Light Dependent Resistant) merupakan suatu jenis tahanan yang sangat peka terhadap cahaya. Sifat dari tahanan LDR ini adalah nilai tahanannya akan berubah apabila terkena sinar atau cahaya. Apabila tidak terkena cahaya nilai tahanannya akan besar dan sebaliknya apabila terkena cahaya nilai tahanannya akan menjadi kecil. LDR terbuat dari bahan cadmium selenoide atau cadmium sulfide. Film cadmium sulfide mempunyai tahanan yang besar jika tidak terkena sinar dan apabila terkena sinar tahanan tersebut akan menurun. LDR banyak digunakan karena mempunyai ukuran kecil, murah dan sensitivitas tinggi. Simbol LDR seperti ditunjukan pada Gambar 2.22, sedangkan Gambar 2.23 menunjukkan grafik hubungan antara resiatansi dan iluminasi
.
Gambar 4.1.1. Grafik hubungan antara resistansi dan iluminasi (diambil dari data sheet LDR)
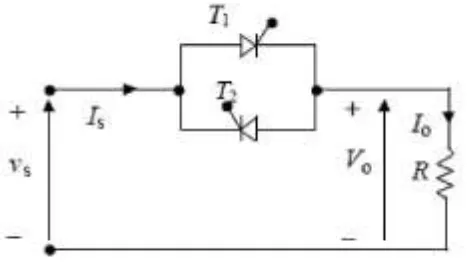
5 Triac
Pengaturan terhadap lampu listrik dapat dilakukan dengan pemotongan gelombang sinusoida. Pemotongan terhadap gelombang sinus menyebabkan nilai efektif arus berkurang sehingga lampu menjadi redup. Pemotongan gelombang sinus dapat dilakukan menggunakan thyristor. Peredup menggunakan thyristor untuk mengontrol gelombang penuh satu fasa yang menentukan kuantitas pemotongan gelombang sinusoida. Prinsip dari kontrol sudut fasa untuk gelombang penuh satu fasa dapat dijelaskan berdasarkan rangkaian pada Gambar 2.24. Energi mengalir ke beban dikontrol dengan menunda sudut pemicuan thyristor T1 dan sudut pemicuan thyristor T2. Selama tegangan masukan setengah siklus positif, daya yang mengalir dikontrol oleh beberapa sudut tunda dari thyristor T1, dan thyristor T2 mengontrol daya selama tegangan masukan setengah siklus negatif. Pulsa-pulsa yang dihasilkan pada T1 dan T2terpisah 180°.
Gambar 5.1. Rangkaian pengontrol gelombang penuh satu fasa Bentuk
Gambar 2.25. Bentuk gelombang pengontrol gelombang penuh satu fasa
SCR (Sillicon Controlled Rectifier) dan TRIAC (Bidirectional triode thyristor) adalah alat thyristor yang paling sering digunakan (Petruzella 2002: 264).
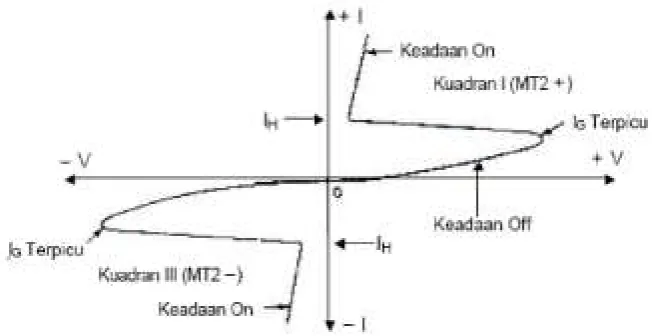
Triac dapat bersifat konduktif dalam dua arah. Dalam hal ini dapat dianggap sebagai dua buah thyristor yang terhubung invers-paralel dengan koneksi gerbang seperti ditunjukkan pada Gambar 5.1.1. Triac mempunyai tiga terminal; terminal utama 2 (MT2), terminal utama 1 atau (MT1), dan gerbang (G). Gambar 5.1.2.
Gambar 5.1.1. Rangkaian ekivalen triac
Gambar 5.1.2. Simbol triac
Jika terminal MT2 positif terhadap MT1, triac dapat di-on-kan dengan memberikan sinyal gerbang positif antara G dan MT1. Jika terminal MT2 negatif
terhadap MT1 maka triac dapat di-on-kan dengan memberikan sinyalpulsa negatif antara G dan MT1. Tidak perlu memiliki kedua sinyal gerbang positif dan negative dan triac dapat dihidupkan baik oleh sinyal gerbang positif maupun negative.
Gambar 5.1.3. Karakteristik triac <>
PERANCANGAN ALAT
Gambar 5.2. Blok diagram sistem Pengendalian Penerangan satu Ruangan Interaksi user dengan sistem dapat dilihat dari input yang diberikan yaitu dengan menekan switch 1. Setelah switch 1 ditekan, input dari sensor cahaya diolah oleh pengendali dengan metode fuzzy logic. Output dari pendendali selanjutnya ditampilkan oleh penampil dan sebagai input rangkaian pengatur tegangan. Lampu akan menyala sesuai dengan input yang diberikan oleh rangkaian pengatur tegangan. Variabel keluaran dari proses yaitu intensitas cahaya yang dihasilkan lampu akan berbaur dengan cahaya dari sumber luar menghasilkan iluminasi ruang Selanjutnya iluminasi ruang diukur oleh sensor cahaya yang kemudian menghasilkan sinyal sebagai masukan umpan balik bagi pengendali. Pengendali akan terus mengolah sinyal masukan dan menghasilkan suatu nilai keluaran sehingga terbentuk suatu sistem kendali loop tertutup. Sistem akan berhenti bekerja apabila user menekan switch 1.
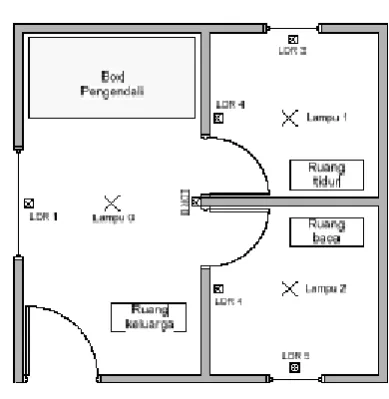
ruang tidur menggunakan lampu dengan daya 5 watt, sedangkan ruang baca menggunakan lampu dengan daya 15 watt. Karena penelitian yang dilakukan menggunakan model, maka atrandar kuat penerangan tidak terpenuhi. Iluminasi yang dihasilkan berdasar lampu yang terpasang, terukur untuk ruang keluarga, ruang ruang tidur, dan ruang baca adalah 300, 70, dan 200 lux. Denah maket rumah ditunjukkan
oleh Gambar 3.2, sedangkan
Gambar 3.3 menunjukkan
maket rumah tampak depan.
Gambar 3.3. Maket Rumah Tampak Depan
3.3. Perancangan Perangkat Keras
bagian pengendali berbasiskan mikrokontroler ATmega8535, rangkaian penampil, rangkain Solid State Relay (SSR). Blok diagram system perangkat keras ditunjukkan pada gambar 3.4, sedangkan gambar rangkaian keseluruhan terlampir.
3.3.1. Sensor Cahaya
Rangkaian sensor cahaya yang digunakan pada pengendali penerangan ruangan ditunjukkan pada Gambar 3.5. Sebagai sensor cahaya adalah LDR (Light Dependent Resistor) yang berfungsi untuk mendeteksi besarnya iluminasi di dalam ruangan. Pengendali penerangan ruangan ini menggunakan enam buah LDR sebagai transducer yg mengubah energi cahaya ke energi listrik yang selanjutnya akan diolah mikrokontroller. LDR 0 dan LDR 1 diletakkan di ruang 0, LDR 2 dan 3 diletakkan di ruang 1, sedangkan LDR 4 dan LDR 5 diletakkan di ruang 2. Masing-masing ruangan menggunakan 2 sensor. Sensor pertama diletakkan di dekat lampu, hal ini bertujuan supaya iluminasi yang diukur sebagian besar bersumber dari lampu. Sedangkan sensor kedua diletakkan dekat dengan sumber luar.
Gambar 3.5. Rangkaian sensor cahaya
3.3.2. Rangkaian Penampil
merupakan modul penyaji kristal cair matrik titik dengan pengendali di dalamnya. Pengendali ini mempunyai sebuah ROM/RAM pembangkit karakter di dalamnya dan RAM data tampilan. Semua fungsi tampilan dikendalikan oleh instruksi-instruksi.
M1632 merupakan Modul LCD Matrix dengan konfigurasi 16 karakter dan 2 baris dengan setiap karakternya dibentuk oleh 8 barispixel dan 5 kolompixel (1 baris pixel terakhir adalah kursor). Gambar 3.6. menunjukkan Modul LCD M1632. Dan
Gambar 3.7. menunjukkan hubungan antara layar LCD dengan HD44780 yang merupakan mikrokontroller pengendali LCD dan mempunyai kemampuan untuk mengatur proses scanning pada layar.
Gambar 3.7. Hubungan HD44780 dengan LCD (diambil dari data sheet HD44780)
Rangkaian ini berfungsi untuk menampilkan informasi sebagai berikut: 1. Nama alat
Setelah sistem dihubungkan dengan jala-jala PLN, pada baris pertama LCD akan menampilkan " KENDALI LAMPU " dan baris kedua akan menampilkan "dgn LOGIKA FUZZY"
2. Identitas pembuat
1,5 detik setelah menampilkan nama alat, LCD akan menampilkan " N E T I K A " pada baris pertama dan "== U N N E S ==" pada baris kedua.
3. Hasil pengukuran iluminasi, output dari pengendali fuzzy, dan periode pemicuan PWM (Pulse Width Modulation)
Jika switch 1 ditekan maka sistem akan berjalan sehingga LCD dapat menampilkan hasil pengukuran iluminasi, output dari pengendali fuzzy, dan periode pemicuan PWM (Pulse Width Modulation). Baris pertama LCD menampilkan hasil pembacaan iluminasi sensor pada ruang 0 (LDR 0 dan LDR 1) yang telah dikonversi menjadi bentuk digital. Baris kedua akan menampilkan output pengendali fuzzy yang berupa nilai tegangan pengaturan, dan menampilkan periode pemicuan PWM yang merupakan hasil konversi dari output pengendali fuzzy. Apabila switch 0 ditekan sekali, LCD akan menampilkan informasi hasil pengukuran iluminasi, output pengendali fuzzy, dan periode pemicuan PWM dari ruang 1. Namun jika switch 0 ditekan dua kali, LCD akan menampilkan informasi dari ruang 2.
Gambar 3.8. Rangkain LCD M1632 3.3.3. Modul pengatur tegangan
Sebagai pengatur tegangan, digunakan rangkaian Solid State Relay (SSR) yang pada prinsipnya adalah penggabungan antara rangkaian optocoupler yang menggunakan Zero Crossing Circuit di dalam MOC 3041 dan TRIAC. Gambar 3.9 menunjukkan gambar rangkaian SSR, sedangkan cara kerja rangkaian ini adalah sebagai berikut:
Jika ada logika 1 pada input (IN) rangkaian ini, maka transistor BD139 akan aktif dan sambungan Collector dan Emitter seolah-olah seperti saklar tertutup sehingga arus akan lewat dari power suply melewati MOC kaki 1 dan 2. Hal ini akan mengakibatkan dioda yang berada didalam MOC 3041 aktif dan transistor yang berada di dalam MOC3041 juga aktif. Keadaan ini akan mengakibatkan arus dari jala-jala 220VAC mengalir ke kaki Gate TRIAC dan akan memicu TRIAC tersebut. Pemicuan ini mengakibatkan kaki MT1 dan MT2 akan terhubung dan jala-jala 220VAC akan mengalir melalui beban. Hal ini berakibat beban ON. C 10nF/400V pada rangkaian ini berfungsi untuk mengurangi arus yang sangat besar saat beban mulai ON.
ataupun logika 1 tersebut dikendalikan oleh mikrokontroler.
Gambar 3.9. Rangkaian Solid State Relay 3.3.4. Mikrokontroler ATmega8535
Rangkaian ini bekerja sebagai unit pengendali agar sistem bekerja sesuai dengan algoritma program.
Bagian input mikrokontroler di dalam rangkaian ini pin 0 - 5 Port A terhubung dengan rangkaian sensor, sehingga system dapat mengolah besarnya tegangan menjadi informasi besarnya iluminasi yang terukur oleh sensor.
Gambar 3.10 . Rangkaian mikrokontroller ATmega8535
3. PROGRAM DAN PENJELASANNYA
Perangkat lunak yang digunakan untuk membuat program mikrokontroler yaitu CodeVision AVR C Compiler dengan menggunakan bahasa C. Selanjutnya program ini disimpan dalam memori data dan memori program.
Inisialisasi sistem ATmega8353. Pada CodeWizardAVR dilakukan pengaturan Port A sebagai input ADC, Port B sebagai output lampu, Port C sebagai output LCD, sedangkan Port D sebagai input zero crossing detector, switch 0 dan switch 1. Timers yang digunakan adalah Timer2 dengan mode normal top = FFh dan clock value 4 MHz. Dalam pemrograman digunakan variabel-variabel sebagai berikut:
void r3(void) {
GPR3=SDR3=TRR3=0;
mu_gpr3=mu_sdr3=mu_trr3=0; // GELAP
if (ldr[x]>127) {mu=0;};
Sedangkan untuk membaca besarnya sinyal dari LDR 0, LDR 2, dan LDR 4 dalam program dituliskan sebagai berikut
ldr[x+1]=read_adc(x+1); r5();
Sinyal-sinyal tersebut selanjutnya difuzzifikasi Berikut adalah penerjemahan derajad keanggotaan input r5 (Gambar 3.13) kedalam bahasa pemrograman Atmega8535.
void r5(void) {
GPR5= AGR5= RRR5= ATR5= TRR5= 0;
mu_gpr5= mu_agr5= mu_rrr5= mu_atr5= mu_trr5= 0; // GELAP
if (ldr[y]>64 && ldr[y]<=128) { mu=((128-ldr[y])*10)/64;
} menggunakan basis aturan yang telah dirancang. Output yang diperoleh dari inferensi selanjutnya didefuzzifikasi untuk mendapatkan output dalam bentuk nilai tegas. Penerj emahan derajad keanggotaan output, basis aturan, dan defuzzifikasi kedalam bahasa pemrogramn Atmega8535 adalah sebagai berikut:
// Global variables char buf[33];
// Variabel fungsi keanggotaan input
unsigned int mu, mu_gpr3, mu_sdr3, mu_trr3, mu_gpr5, mu_agr5, mu_rrr5, mu_atr5, mu_trr5,
GPR3, SDR3, TRR3, GPR5, AGR5, RRR5, ATR5, TRR5, ldr[6], xx;
long int ot[6];
unsigned char room, rom, flg, x, out_fuz[6]; // Variabel fungsi keanggotaan output
unsigned int mu_pdot, mu_atot, mu_rdot, mu_srot, mu_trot;
Program dimulai dengan inisialisasi variabel awal pada menu utama:
void main(void)
Selanjutnya LCD akan menampilkan informasi nama alat dan identitas pembuat, dalam pemrograman dituliskan sebagai berikut:
#asm("cli") // Global disable interrupts lcd_init(16); // LCD module initialization lcd_gotoxy(0,0); lcd_putsf(" KENDALI LAMPU");
lcd_clear();
#asm("sei") // Global enable interrupts while (1)
{
lcd_gotoxy(0,0); lcd_putsf(" D E D Y ");
lcd_gotoxy(0,1); lcd_putsf("== U N D I K S H A ==");
Proses pengendalian dimulai apabila switch 1 ditekan
j=0;
while (PIND.7==1) {} while (PIND.7==0) {} while (j==0) {
if (PIND.7==0) {j=1;};
Untuk membaca besarnya sinyal dari LDR 0, LDR 2, dan LDR 4 dalam program dituliskan sebagai berikut
ldr[x]=read_adc(x); r3();
// TERANG
Sedangkan untuk membaca besarnya sinyal dari LDR 0, LDR 2, dan LDR 4 dalam program dituliskan sebagai berikut
ldr[x+1]=read_adc(x+1); r5();
Sinyal-sinyal tersebut selanjutnya difuzzifikasi Berikut adalah penerjemahan derajad keanggotaan input r5 (Gambar 3.13) kedalam bahasa pemrograman Atmega8535.
void r5(void) {
unsigned char y; y=x+1;
GPR5= AGR5= RRR5= ATR5= TRR5= 0;
if (ldr[y]>64 && ldr[y]<=128) {
sebuah rumah.
Kesimpulan
Berdasarkan perancangan dan pengujian yang telah dilakukan maka dapat disimpulkan bahwa:
1. Pengendalian penerangan dalam ruang dengan memperhitungkan kontribusi pencahayaan dari sumber luar kedalam ruangan dapat menghemat energi. 2. Sistem ATmega8535 berfungsi sebagai central processing unit yang
mengolah sinyal analog dari LDR menjadi suatu nilai keluaran yang berupa waktu tundaan untuk pemicuan triac pada rancl mjgkaian solid state relay. 3. Jumlah ruangan yang dikendalikan oleh Sistem Pengendali Penerangan
Ruangan ini terbatas. Hal ini disebabkan oleh kapasitas ADC internal yang berada di Port A Mikrokontroler ATmega8535 hanya terdiri dari 8 pin. 4. Mikrokontroller ATmega8535 dapat bekerja dengan baik karena hubungan