BAB II
LANDASAN TEORI
1.1. Kajian penelitian yang relevan
No Judul Penulis Tahun Masalah Metode Kontribusi Hasil
1
Rancang bangun robot pelatih tenis meja dengan menggunakan sensor ultrasonic berbasis mikrokontroler Arduino uno Hidayatullah, Jhonson Efendi Hutagalung, Azroy Setiawan Nst 2017
Tidak adanya alat yang dapat membantu melatih tenis meja dengan mode otomatis.
Mendefinisikan masalah, manganalisa masalah penelitian, mempelajari dan memgumpulkan data, mempelajari system menganalisa system, analisa rangkaian, analisa hasil.
Mempermudah latihan dengan system otomatis yang ada pada robot dengan sensor ultrasonic
Membuat robot pelatih tenis meja yang dapat menjadi teman latihan tenis meja dengan system otomasi
2
System kendali gerakan lengan robot pelempar bola pingpong berbasis Arduino uno Priyatmadi, Ir., M.T. , Bambang Sugiyantoro, Ir., M.T. M. Nur Wangsa Saputra 2015
mesin pelontar bola pingpong yang beredar di pasaran sangat mahal harganya
dan belum terjangkau oleh berbagai pusat pelatihan,
khususnya Yogyakarta
Menemukan masalah, menganalisa masalah, mernancang sisten, meranncang aat, manguji dan amenagalisa alat.
Mengstasi maslah harga mesin pelontar bola pingpong yang malah dengan merancang alat yang mampu meniru mesin pelontar dengan spesifikasi yang baik.
Meningkatkan teknik permainan dengan metode latihan robot dengan system otomasi
3
Pengembangan alat pelontar bola tenis meja berbasis microcontroller Syarifatunnisa, NurlanKusmaedi, NurIndriRahayu 2017
Kemajuan teknolgi perlu dimanfaatkan untuk kemajuan bidang olahraga tenis meja.
R&D ( reseach and development)
melakukan pengembangan teknologi alat pelontar bola tenis meja berbasis microcontroller.
microcontroller memiliki reabilitas yang sangat baik.
4 Racang bangun lengan robot pingpong berbasis mikro kontroler Arduino uno Syukranullah , Bukhari, ,Ismi Amalia 2019
daya atau momen untuk mengangkat beban sehingga pergerakan lengan robot akan ringan dengan cara direduksi menggunakan rodagigi
Studin literature, design alat, perakitan alat, perancangan system elektronik, pengujian, analisa. Menghasilkan desain rancang bangun lengan robot pemindah barang berbasis arduino uno dengan skala kecil dan menganalisa kemampuan aktuator terhadap kinerja roobot dengan servo.
melakukan
perancangan terhadap lengan robot baik mekanik maupun elektronik, maka robot dapat dioperasikan dengan cara mengontrol pergerakan lengan dengan menggunakan potensiometer. 5 Development of ANS PONG as a Tool for Block Training and Smash
in Table Tennis Games
Anang Sudrajat , Nasuka & Fajar Awang Irawan 2019 Perkembangan dan kemajuan teknologi olahraga diperlukan untuk kemajuan prestasi olahraga. R&D , penegembangan produk dan pemgujian.
Mengembangkan desain produk ANS PONG untuk latihan block and smash, ANS PONG Production yang efektif dan terjangkau
Produk ANS PONG dapat digunakan sebagai a
alat untuk latihan balok dan smash di tenis meja permainan, terutama untuk atlet pelajar dan orang dewasa.
Tabel diatas adalah penelitian yang telah dilakukan oleh beberapa penulis. Dari semua penelitian diatas semua judul mengarah kepada pengembangan robot pingpong dengan mikro controller arduino dan beberapa keunggulan yang ditonjolkan. Tapi setiap penelitian diatas memiliki keunggulan dan fiture yang berbeda dalam mengembangkan robot tenis meja.
Perbedaan penelitian saya dengan 5 penelitian diatas adalah perangkat kendali yang digunakan dan fiture yang dikembangkan pada robot. 5 penelitian diatas tidak ada yang menggunakan kendali nirkabel sementara peenelitian yang saya lakukan membuat robot dengan kendali perangkat smartphone dengan tujuan mempermudah pengaturan fitur dan penggantian jenis putaran bola secara otomatis.
1.2. Teknik dasar tenis meja
Tenis meja merupakan permainan yang sederhana. gerakan yang dilakukan dalam olahraga ini adalah konsisten memukul, dan dengan teknik tertentu dengan bertujuan menyulitkan lawan main kesulitan mengembalikan bola. Olahraga tenis meja cukup menjadi olahraga yang populer meski tidak seperti sepak bola. Namun dalam tenis meja memerlukan teknik-teknik yang sulit untuk di kuasai dan hanya bias di lakukan dengan latihan dan jarang sekalai pemain tenjs meja bias menguasai tenis meja tanpa menjalani latihan.
Teknik pukulan dalam tenis meja dibagi menjadi dua yaitu forehand an
backhand.
a. Forehand
Pukulan forehand biasanya merupakan pukulan yang paling keras dan kuat karena tubuh tidak menghalangi saat melakukan pukulan. “Pukulan
Forehandadalah dimana pada waktu memukul bola posisi telapak tangan yang memegang bet/raket menghadap ke depan” (Sumarno, dkk, 2003:16). Sedangkan menurut Sutarmin (2007: 21), “Pukulan forehand adalah padawaktu memukul bola, posisi telapak tangan yang memegang bet menghadapke depan, atau posisi punggung tangan yang memegang bet menghadap kebelakang”.
Dengan demikian dari beberapa definisi di atas dapat disimpulkanbahwa pukulan forehand adalah pukulan yang dilakukan dengan posisitelapak tangan yang memegang bet menghadap ke depan dan setiap pukulanyang dilakukan dengan bet gerakan ke arah kanan, sedangkan ke kiri bagipemain yang menggunakan tangan kiri.
Gambar 1 gerakan forehand
b. Backhand
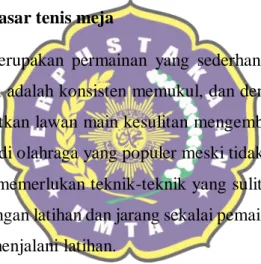
Pukulan backhand dilakukan jika bola berada disebelah kiri badan (Sapto Adi dan Mu’arifin, 1994: 17). Cara melakukannya pertama rendahkan posisi tubuh lalu gerakkan tangan kearah pinggang sebelah kiri jika tidak kidal, dengan sudut siku sembilan puluh derajat. Gerakkan tangan dan bet ke arah depan, jaga siku agar tetap sembilan puluh derajat dan bet tetap lurus.
Gerakan pukulan backhand adalah sikap permulaan lengan yang memegang bet ditarik mendekati tubuh, dengan sedikit di bawah bahu kiri sudut bet terbuka. Kaki kiri di depan kaki kanan sedikit. Saat perkenaan bola mencapai pantulan tertinggi. Saat ini berat badan mulai dipindahkan dari kaki belakang ke kaki depan. Sikap akhir dilanjutkan sampai dengan lurus. Pada tahap ini sikap bet yang terbuka makin nampak, berat badan sepenuhnya bertumpu pada kaki depan (Tatang Muhtar dan Wahyu Sulistyo, 2007: 67).
Pukulan backhand dilakukan jika bola berada disebelah kiri badan. Cara melakukannya pertama rendahkan posisi tubuh lalu gerakkan tangan ke arah pinggang sebelah kiri jika tidak kidal, dengan sudut siku 90º. Gerakkan tangan
dan bet kearah depan, jaga siku agar tetap 90º dan bet tetap lurus. Posisi kaki kiri tetap berada sedikit di depan kaki kanan agar tidak terlambat dalam permainan yang cepat (Tatang Muhtar dan Wahyu Sulistyo, 2007: 67).
Gambar 2 pukulan backhand
1.3. Motor servo
Motor servo adalah sebuah motor DCdengan sistem umpan balik tertutup di mana posisi rotor-nya akan diinformasikan kembali kerangkaian kontrol yang ada di dalam motor servo. Motor ini terdiri dari sebuah motor DC, serangkaian
gear, potensiometer, dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas sudut dari putaran servo. Sedangkan sudut darisumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel
motor servo. ( Hidayatullah, Jhonson Efendi Hutagalung, Azroy Setiawan Nst, 2017).
gambar 3 servo tower pro SG90
Spesifikasi TowerPro SG-90 Operating Voltage is +5V typically Torque: 2.5kg/cm
Operating speed is 0.1s/60° Gear Type: Plastic
Rotation : 0°-180° Weight of motor : 9gm
Package includes gear horns and screws
1.4. Motor DC
Motor DC adalah motor listrik yangmemerlukan suplai tegangan arus searah pada kumparan medan untuk diubah menjadi energy gerak mekanik. Kumparan medan pada motor dc disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Motor arus searah, sebagaimana namanya, menggunakan arus langsung yang tidak langsung/direct unidirectional. Motor DC memiliki 3 bagian atau komponen utama untuk dapat berputar sebagai berikut. ( Hidayatullah, Jhonson Efendi Hutagalung, Azroy Setiawan Nst, 2017).
Pada alat ini terdapat buah dynamo terpsang atas dan bawah tujuannnya, untuk menghasilkan variasi putaran bola ke depan da ke belakang. Putaran bola ke depan dibutuhkan untuk memlatih teknik pukulan stroke foerehand
dan backhand. Sedangkan putaran kebelakang atau di sebut putaran chop bertujuan untuk melatih teknik spin yaitu menggesek bola chop untuk menhasilkan serangan dengan putaran bola yang tinngi.
Gambar 4 motor DC 775
General Specification: Motor Type: 775.
Operating Voltage: 6~20Vdc. (Nominal 12Vdc) No Load Speed: 12,000 RPM @ 12V.
Rated current: 1.2A @ 12V. Stall Torque: 79Ncm @ 14.4V. Cooling Fan: Internal.
Overall Size: 98x42mm.
Shaft: Full Round Type Ø5mm. Mounting Screw Size: M4. Weight: 350g.
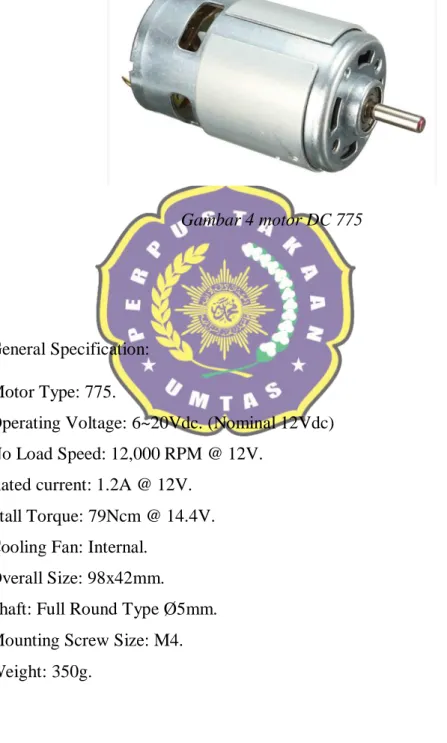
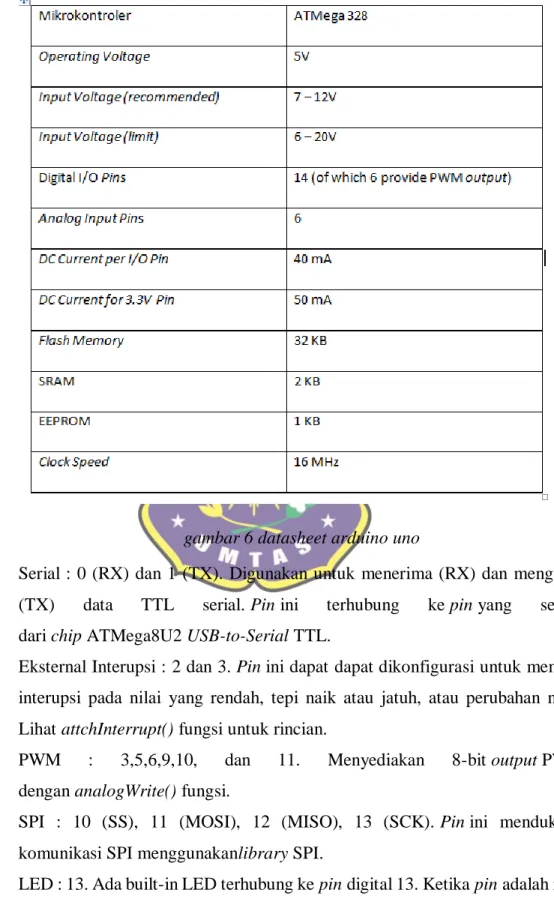
Arduino Uno R3 adalah papan pengembangan (development board) mikrokontroler yang berbasis chip ATmega328P. Disebut sebagai papan pengembangan karena board ini memang berfungsi sebagai arena prototyping sirkuit mikrokontroller. Dengan menggunakan papan pengembangan, anda akan lebih mudah merangkai rangkaian elektronika mikrokontroller dibanding jika anda memulai merakit ATMega328 dari awal di breadboard.Arduino Uno memiliki 14 digital pin input / output (atau biasa ditulis I/O, dimana 6 pin diantaranya dapat digunakan sebagai output PWM), 6 pin input analog, menggunakan crystal 16 MHz, koneksi USB, jack listrik, header ICSP dan tombol reset. Hal tersebut adalah semua yang diperlukan untuk mendukung sebuah rangkaian mikrokontroler. Cukup dengan menghubungkannya ke komputer dengan kabel USB atau diberi power dengan adaptor AC-DC atau baterai, anda sudah dapat bermain-main dengan Arduino UNO anda tanpa khawatir akan melakukan sesuatu yang salah. Kemungkinan paling buruk hanyalah kerusakan pada chip ATMega328, yang bisa anda ganti sendiri dengan mudah dan dengan harga yang relatif murah.
Kata ” Uno ” berasal dari bahasa Italia yang berarti “satu”, dan dipilih untuk menandai peluncuran Software Arduino (IDE) versi 1.0. Arduino. Sejak awal peluncuran hingga sekarang, Uno telah berkembang menjadi versi Revisi 3 atau biasa ditulis REV 3 atau R3. Software Arduino IDE, yang bisa diinstall di Windows maupun Mac dan Linux, berfungsi sebagai software yang membantu anda memasukkan (upload) program ke chip ATMega328 dengan mudah.
Board Arduino Uno memiliki fitur – fitur baru sebagai berikut :
pinout : menambahkan SDA dan SCL pin yang deket ke pin aref dan
dua pin baru lainnya ditempatkan dekat ke pin RESET, dengan I/O REF yang memungkinkan sebagai buffer untuk beradaptasi dengan tegangan yang disediakan dari board sistem. Pengembangannya, sistem akan lebih kompatibel dengan prosesor yang menggunakan AVR, yang beroperasi dengan 5V dan dengan Arduino karena beroperasi dengan 3,3V. Yang kedua adalah pin yang tidak terhubung, yang disediakan untuk tujuan pengembangannya.
Sirkuit reset
ATMega 16U2 ganti 8U yang digunakan sebagai konverter USB-to-serial.
gambar 6 datasheet arduino uno
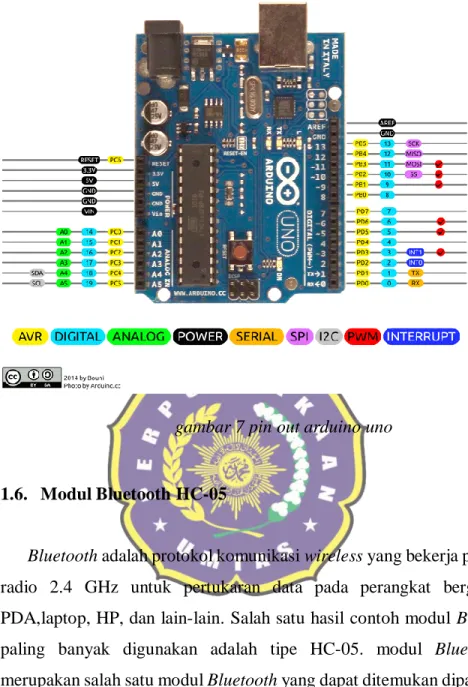
Serial : 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan mengirim (TX) data TTL serial. Pin ini terhubung ke pin yang sesuai dari chip ATMega8U2 USB-to-Serial TTL.
Eksternal Interupsi : 2 dan 3. Pin ini dapat dapat dikonfigurasi untuk memicu interupsi pada nilai yang rendah, tepi naik atau jatuh, atau perubahan nilai. Lihat attchInterrupt() fungsi untuk rincian.
PWM : 3,5,6,9,10, dan 11. Menyediakan 8-bit output PWM dengan analogWrite() fungsi.
SPI : 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). Pin ini mendukung komunikasi SPI menggunakanlibrary SPI.
LED : 13. Ada built-in LED terhubung ke pin digital 13. Ketika pin adalah nilai TINGGI. LED menyala, ketika pin adalah RENDAH, itu off.
Arduino Uno R3 memiliki 6 input analog diberi label A0 sampai A5, masing –
masing menyediakan 10-bit resolusi (yaitu 1024 nilai yang berbeda). Secara default sistem mengukur dari ground sampai 5 volt, meskipun mungkin untuk mengubah ujung atas rentang mengunakan pin AREF dan fungsi analogReference(). Selain itu, beberapa pin memiliki fungsi khusus :
TWI : A4 atau SDA pin dan A5 atau SCL pin. Mendukung komunikasi TWI AREF : Referensi tegangan untuk input analog. Digunakan dengan
analogReference() RESET
Arduino Uno R3 memiliki sejumlah fasilitas untuk berkomunikasi dengan
komputer, Arduino lain, atau mikrokontroler lainnya. ATmega328 menyediakan UART TTL (5V) komunikasi serial, yang tersedia di pin digital 0 (RX) dan 1 (TX). Sebuah ATmega16U2 pada board ini komunikasi serial melalui USB dan muncul sebagai com port virtual untuk perangkat lunak pada komputer. Firmware ’16U2 menggunakan USB driver standar COM, dan tidak ada driver eksternal yang diperlukan. Namun, pada Windows, file. Inf diperlukan. Perangkat lunak Arduino termasuk monitor serial yang memungkinkan data sederhana yang akan dikirim ke boardArduino. RX dan TX di board LED akan berkedip ketika data sedang dikirim melalui chip USB-to-serial dan koneksi USB ke komputer (tetapi tidak untuk komunikasi serial pada pin 0 dan 1). Fungsi ini digunakan untuk melakukan komunikasi interface pada sistem. ATmega328 juga mendukung komunikasi I2C (TWI) dan SPI.
gambar 7 pin out arduino uno
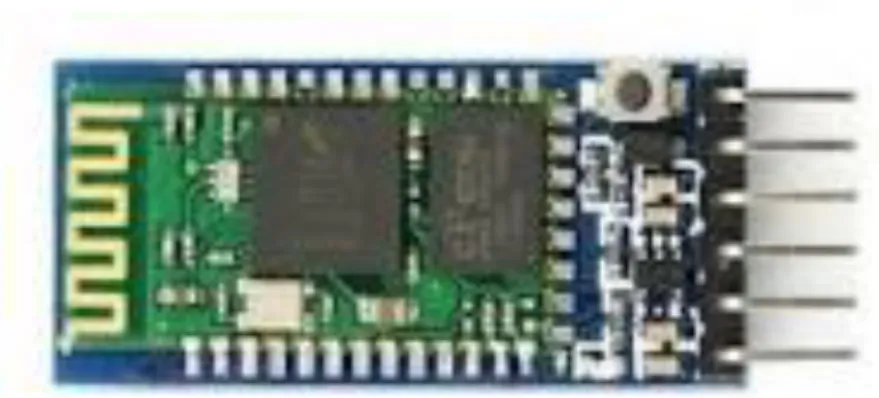
1.6. Modul Bluetooth HC-05
Bluetooth adalah protokol komunikasi wireless yang bekerja pada frekuensi
radio 2.4 GHz untuk pertukaran data pada perangkat bergerak seperti PDA,laptop, HP, dan lain-lain. Salah satu hasil contoh modul Bluetooth yang paling banyak digunakan adalah tipe HC-05. modul Bluetooth HC-05 merupakan salah satu modul Bluetooth yang dapat ditemukan dipasaran dengan harga yang relative murah. Modul Bluetooth HC-05 terdiri dari 6 pin konektor, yang setiap pin konektor memiliki fungsi yang berbeda - beda. Untuk gambar
Gambar 8 module bluetooth
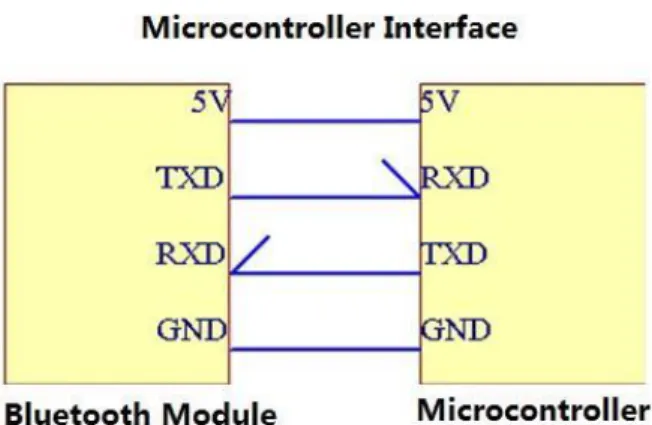
Modul Bluetooth HC-05 dengan supply tegangan sebesar 3,3 V ke pin 12 modul Bluetooth sebagai VCC. Pin 1 pada modul Bluetooth sebagai transmitter. kemudian pin 2 pada Bluetooth sebagai receiver. Berikut merupakan konfigurasi pin bluetoooth HC-05 ditunjukkan pada gambar dibawah ini:
Gambar 9 pin out module bluetooth
Gambar 10 wiring bluetooth to controller
Module Bluetooth HC-05 merupakan module Bluetooth yang bisa menjadi slave
ataupun master hal ini dibuktikan dengan bisa memberikan notifikasi untuk melakukan pairing keperangkat lain, maupun perangkat lain tersebut yang melakukan pairing ke module Bluetooth CH-05. Untuk mengeset perangkat
Bluetooth dibutuhkan perintah-perintah AT Command yang mana perintah AT Command tersebut akan di respon oleh perangkat Bluetooth jika modul Bluetooth
tidak dalam keadaan terkoneksi dengan perangkat lain.
1.7. Modul driver L298
Module L298N Dual H-Bridge Driver Motor ini berfungsi untuk "mendrive" atau menyetir atau dengan kata lain mempermudah kita dalam urusan mengontrol motor DC menggunakan mikrokontroler. Kita tau bahwa logic level output dari mikrokontroler yaitu 3.3V dan 5V dengan arus yang sangat terbatas, sehingga kita tidak bisa mengendalikan motor secara langsung apalagi motor tersebut membutuhkan level tegangan dan arus yang lebih besar, jika motor DC kecil sih bisa saja tapi itu juga beresiko. Oleh sebab itu dalam mengendalikan motor menggunakan mikrokontroler maka diperlukan sebuah Driver.
Dengan Driver Motor selain kita dapat mengendalikan On/Off dan arah putaran, kita juga dapat mengendalikan kecepatannya melalui metode PWM.
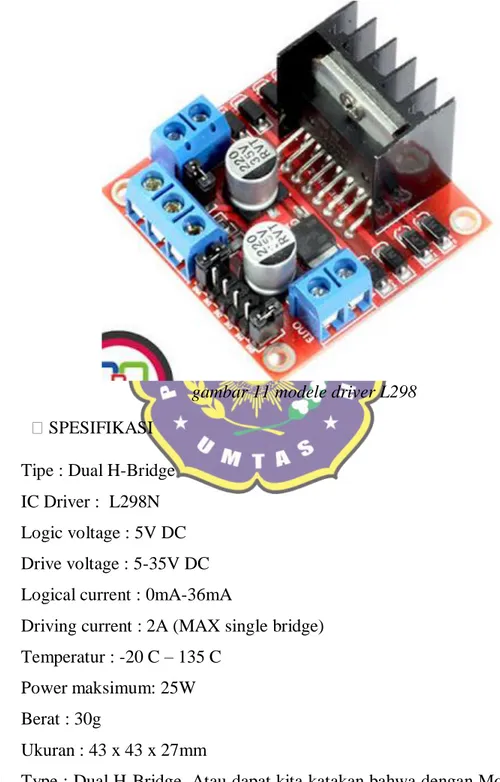
gambar 11 modele driver L298
🔀 SPESIFIKASI Tipe : Dual H-Bridge IC Driver : L298N Logic voltage : 5V DC Drive voltage : 5-35V DC Logical current : 0mA-36mA
Driving current : 2A (MAX single bridge) Temperatur : -20 C – 135 C
Power maksimum: 25W Berat : 30g
Ukuran : 43 x 43 x 27mm
1. Type : Dual H-Bridge, Atau dapat kita katakan bahwa dengan Module Driver ini kita dapat mengontrol dua buah motor sekaligus
2. Logic Voltage : 5V, Yang artinya untuk mengontrol Module Driver ini butuh logic kontrol tengan tegangan 5V (jika HIGH maka setara dengan 5V atau 0V ketika berlogika LOW )
3. Drive voltage : 5-35V DC, yang artinya kita bisa mengendalikan motor DC dengan tegangan antara 5-35V (Simak penjeasan lebih lanjut khusus untuk poin
ini)
4. Logical current : 0mA-36mA, artinya arus dari logic tegangan cukup hanya 0mA sampai dengan 36mA (contoh arus dari Pin Digital arduino maksimal adalah 40mA yang artinya lebih dari cukup)
5. Driving current : 2A (MAX single bridge) Artinya Modul ini mampu untuk mendrive motor DC dengan arus memcapai 2A dengan syarat hanya menggunakan satu motor saja. *simak penjelasan lebih lanjut mengenai Power 6. Temperatur : -20 C – 135 C, Module ini mampu bekerja di suhu -20'C sampai 135'C menurut datasheet (Sebagai acuan, air membeku pada suhu 0'C dan mendidih pada suhu 100'C)
7. Power maksimum: 25W, Artinya daya yang mampu di-drive oleh Driver motor L298N ini adalah sebesar maksimum 25W. *Simak penjelasan lebih lanjut mengenai ini
8. Berat : 30g (didapat dari situs)
9. Ukuran : 43mm x 43mm x 27mm, Cukup berukuran minimalis dan memiliki desain yang menarik juga kokoh.
gambar 12 pin out module driver L298 🔀 IC L298N 78M05 🔀 POWERING Soket Supply 5-35V GND 5V 🔀 JUMPER
Jumper EN1 (Enable 1) Jumper EN2 (Enable 2) Jumper Internal 5V
IN1 IN2 IN3 IN4
EN1(Jika Jumper Dilepas) EN2 (Jika Jumper Dilepas)
🔀 SOKET OUTPUT OUT1 OUT2 OUT3 OUT4 ➤ IC :
L298N : Merupakan IC utama pada module ini yaitu IC yang didesain sebagai IC dual H-Bridge driver motor (mampu mengendalikan dua motor sekaligus) dengan desain berdiri sehingga dengan mudah bisa dipasangi pendingin untuk menjaga ketahanan dari panas akibat pemakaian.
78M05 : Merupakan IC regulator 5V (IC 7805 versi SMD) yang diperuntukan sebagai supply alternativ IC utama yaitu IC L298N, IC regulator ini merubah tegangan yang masuk pada Pin Soket +12V menjadi tegangan 5V sebagai Supply Vss IC L298N. Ingat bahwa IC L298N hanya akan berfungsi jika kaki Vcc diberi supply sebesar 5V). Namun demikian IC regulator 78M05 ini idealnya disupply dengan tegangan minimum 7.5V, sehingga jika tegangan pada Pin Soket kurang dari 7.5V maka output dari IC regulator ini tidak setabil atau bahkan kurang dari 5V yang dapat mengakibatkan fungsi dari IC utama terganggu.
Soket Supply 5-35V : Merupakan Soket (Pin) Supply Voltage dimana besaran tegangan yang kita masukan disesuaikan dengan karakteristik dari motor DC yang kita gunakan.
GND : Ground
5V : Merupakan soket (Pin) 5V dimana jalur dari soket ini terhubung dengan kaki Vss dari IC L298N. Penjelasan mengenai kegunaan dan kapan kita gunakan soket 5V ini akan dibahas lebih lanjut.
1.8. PWM (Pulse Width Modulation)
PWM adalah kepanjangan dari Pulse Width Modulation atau dalam bahasa Indonesia dapat diterjemahkan menjadi Modulasi Lebar Pulsa. Jadi pada dasarnya, PWM adalah suatu teknik modulasi yang mengubah lebar pulsa (pulse width) dengan nilai frekuensi dan amplitudo yang tetap. PWM dapat dianggap sebagai kebalikan dari ADC (Analog to Digital Converter) yang mengkonversi sinyal Analog ke Digital, PWM atau Pulse Width Modulation ini digunakan menghasilkan sinyal analog dari perangkat Digital (contohnya dari Mikrokontroller).
Untuk lebih memahami apa yang dimaksud dengan PWM atau Pulse Width Modulation ini. Kita coba melihat contoh dari sinyal yang dihasilkan oleh Mikrokontroler atau IC 555. Sinyal yang dihasilkan oleh Mikrokontrol atau IC555 ini adalah sinyal pulsa yang umumnya berbentuk gelombang segiempat. Gelombang yang dihasilkan ini akan tinggi atau rendah pada waktu tertentu. Misalnya gelombang tinggi di 5V dan paling rendah di 0V. Durasi atau lamanya waktu dimana sinyal tetap berada di posisi tinggi disebut dengan “ON Time” atau “Waktu ON” sedangkan sinyal tetap berada di posisi rendah atau 0V disebut dengan “OFF Time” atau “Waktu OFF”. Untuk sinyal PWM, kita perlu melihat dua parameter penting yang terkait dengannya yaitu Siklus Kerja PWM (PWM Duty Cycle) dan Frekuensi PWM (PWM Frequency).
1.9. Siklus Kerja PWM (PWM Duty Cycle)
Seperti yang disebutkan diatas, Sinyal PWM akan tetap ON untuk waktu tertentu dan kemudian terhenti atau OFF selama sisa periodenya. Yang membuat PWM ini istimewa dan lebih bermanfaat adalah kita dapat menetapkan berapa lama kondisi ON harus bertahan dengan cara mengendalikan siklus kerja atau Duty Cycle PWM.
Persentase waktu di mana sinyal PWM tetap pada kondisi TINGGI (ON Time) disebut dengan “siklus kerja” atau “Duty Cycle”. Kondisi yang sinyalnya selalu dalam kondisi ON disebut sebagai 100% Duty Cycle (Siklus Kerja 100%), sedangkan kondisi yang sinyalnya selalu dalam kondisi OFF (mati) disebut dengan 0% Duty Cycle (Siklus Kerja 0%). Rumus untuk menghitung siklus kerja atau duty cycle dapat ditunjukkan seperti persamaan di bawah ini.
Duty Cycle = tON / (tON + tOFF) Atau
Duty Cycle = tON / ttotal Dimana :
tON = Waktu ON atau Waktu dimana tegangan keluaran berada pada posisi tinggi (high atau 1)
tOFF = Waktu OFF atau Waktu dimana tegangan keluaran berada pada posisi rendah (low atau 0)
ttotal = Waktu satu siklus atau penjumlahan antara tON dengan tOFF atau disebut juga dengan “periode satu gelombang”
Siklus Kerja = Waktu ON / (Waktu ON + Waktu OFF)
Gambar berikut ini mewakili sinyal PWM dengan siklus kerja 60%. Seperti yang kita lihat, dengan mempertimbangkan seluruh periode waktu (ON time + OFF time), sinyal PWM hanya ON untuk 60% dari suatu periode waktu.
gambar 13 sinyal PWM
Frekuensi sinyal PWM menentukan seberapa cepat PWM menyelesaikan satu periode. Satu Periode adalah waktu ON dan OFF penuh dari sinyal PWM seperti yang ditunjukkan pada gambar di atas.
Berikut ini adalah Rumus untuk menghitung Frekuensi :
Frequency = 1 / Time Period
Keterangan : Time Periode atau Periode Waktu = Waktu ON + Waktu OFF Biasanya sinyal PWM yang dihasilkan oleh mikrokontroler akan sekitar 500 Hz, frekuensi tinggi tersebut akan digunakan dalam perangkat switching yang berkecepatan tinggi seperti inverter atau konverter. Namun tidak semua aplikasi membutuhkan frekuensi tinggi. Sebagai contoh, untuk mengendalikan motor servo kita hanya perlu menghasilkan sinyal PWM dengan frekuensi 50Hz, frekuensi sinyal PWM ini juga dapat dikendalikan oleh program untuk semua mikrokontroler.
2.10. Menghitung tegangan output sinyal PWM
Tegangan output sinyal PWM yang telah diubah menjadi analog akan menjadi persentase dari siklus kerja (Duty Cycle). Misalnya jika tegangan operasi 5V maka sinyal PWM juga akan memiliki 5V ketika tinggi. Apabila Duty Cycle atau siklus
kerja adalah 100%, maka tegangan output akan menjadi 5V. Sedangkan untuk siklus kerja 50% akan menjadi 2.5V. Demikian juga apabila siklus kerja 60% maka Tegangan Output analognya akan menjadi 3V.
Rumus perhitungan tegangan output sinyal PWM ini dapat dilihat seperti persamaan dibawah ini :
Vout = Duty Cycle x Vin
Contoh Kasus Perhitungan PWM :
Desain PWM dengan siklus kerja 60% dengan frekuensi 50Hz dan Tegangan Input 5V. Penyelesaiannya : Diketahui : Duty Cycle : 60% Frequency : 50Hz Vin : 5V
Mencari Time Period atau Periode Waktu : Time Period = 1 / 50Hz
Time Period = 0,02 detik atau 20 milidetik
Mencari Waktu ON (ON-Time) dengan siklus kerja 60% (0,6) Duty Cycle = tON / (tON + tOFF)
0,6 = tON / (tON + tOFF) 0,6 = tON / 20 milidetik tON = 0,6 x 20 milidetik tON = 12 milidetik
Mencari Waktu OFF (OFF-Time) tOFF = ttotal – tON
tOFF = 20 – 12 tOFF = 8 milidetik
Mencari Tegangan Output Vout = Duty Cycle x Vin
Vout = 60% x 5V Vout = 3V
gambar 14 sinyam pwm hasil perhitiungan
2.11. PWM arduino
Kita dapat mengirimkan sinyal HIGH dan LOW atau on dan off pada Arduino untuk menyalakan dan mematikan sesuatu menggunakan digitalWrite(). Bagaimana kalo kita ingin mengaktifkan sesuatu dengan kekuatan tertentu dan bisa diubah-ubah sesuai keperluan, seperti misalnya mengatur intensitas cahaya LED atau mengatur kecepatan putaran motor? Dalam hal ini kita punya analog output. Analog output pada Arduino berarti kita mengirimkan sinyal analog dengan intensitas yang ditentukan sesuai kebutuhan.
Analog input dihasilkan oleh teknik yang dikenal dengan istilah PWM atau
Pulse Width Modulation. PWM memanipulasi keluaran digital sedemikian rupa
sehingga menghasilkan sinyal analog. Mikrokontroler mengeset output digital ke HIGH dan LOW bergantian dengan porsi waktu tertentu untuk setiap nilai keluarannya. Durasi waktu untuk nilai HIGH disebut pulse width atau panjang pulsa. Variasi nilai output analog didapatkan dari perubahan panjang pulsa yang diberikan pada satu periode waktu dan dilakukan berulang-ulang. Untuk lebih jelasnya perhatikan ilustrasi berikut:
gambar 15 sinyal pwm arduino
Kondisi HIGH adalah kondisi ketika sinyal berada di atas grafik (5V) dan LOW adalah ketika sinyal berada di bawah (0V). Duty cycle adalah persentasi panjang pulsa HIGH dalam satu periode sinyal. Ketika duty cyclenya 0% atau sinyal LOW penuh, maka nilai analog yang dikeluarkan adalah 0V atau setara dengan GND. Ketika duty cyclenya 100% atau sinyal HIGH penuh maka sinyal yang dikeluarkan adalah 5V.
Untuk mengatur nilai duty cycle, kita gunakan fungsi analogWrite([nomorPin], [nilai]). Nilai pada parameter kedia berkisar antara 0 hingga 255. Bila kita hendak mengeset duty cycle ke 0%, maka kita set nilai parameter ke 0, dan untuk duty cycle 100%, maka kita set nilai parameter ke 255. Jadi bila misalkan kita hendak mengeset duty cycle ke 50%, berarti nilai yang harus kita set adalah 127 (50% x 255).
Sebenarnya berdasarkan konsep PWM di atas, kita dapat mensimulasikan PWM pada semua pin digital. Tapi khusus penggunaan fungsi digitalWrite() kita
hanya bisa menggunakannya pada pin-pin PWM. Seperti pada Arduino Uno, pin yang dapat menggunakan fungsi ini hanya pin 3, 5, 6, 9, 10 dan 11. Biasanya pin PWM disimbolkan dengan karakter '~'
1.10. App Inventor
App Inventor adalah sistem perangkat lunak untuk membuat aplikasi pada
perangkat Android. Uniknya, App Inventor dibuat tidak seperti system pengembangan aplikasi biasa di mana seorang programmer harus menuliskan baris-baris kode program, melainkan dengan interaksi visual berbasis grafis. Dalam hal ini, App Inventor dapat disebut sebagai system terpadu untuk mengembangkan aplikasi berbasis blog-blog grafis ( dalam istilah asing: blocks
language ). Jika kita mengenal Scartch (http://scratch.mit.edu), App Inventor
bekerja dengan cara yang kurang-lebih sama, tetapi untuk platform perangkat bergerak pada yang berbasis Android. Istilah App Inventor dan inventor digunakan sebagai sinonim. Inventor diuji coba pertama kali pada kalangangan terbatas juli 2010, kemudian dirilis ke publik pada desember tahun yang sama. Pengembangan
Inventor dimotifikasi oleh keyakinan dan perspektif edukasi yang kuat bahwa
pembelajaran aktif pemograman (secara visual) dapat menjadi wahana untuk memicu ide-ide baru dan kreatif.
App Inventor 2 adalah Integrated Development Environment (IDE)yang
ditujukan bagi semua kalangan untuk mengembangkan aplikasi Android tanpa harus berpengalaman dalam dunia pemrograman. Aplikasi ini merupakan aplikasi
open source (sumber terbuka) berbasis web yang semulanya disediakan oleh
Google dan sekarang dikelola oleh Massachusetts Institute of Technology (MIT). App Inventor 2 didesain dengan simple dan mudah dimengerti. Pada App Inventor kita tidak harus bersentuhan dengan dunia pemrograman komputer yang kompleks. kita tidak perlu menuliskan kode-kode pemrograman untuk membuat aplikasi.
App Inventor 2 adalah tool berbasis drag/drop dan visual blocks programming
Visual Blocks Programming mampu mentransformasikan pengkodean bahasa
pemrograman berbasis teks kedalam bahasa visual dalam bentuk kode-kode program.
Pengkodean program dilakukan dengan cara drag and drop (geser dan lepaskan) blok-blok kode program kedalam Blocks Editor. Kemudian menyusun blok-blok kode program tersebut seperti halnya ketika menyusun puzzle (teka-teki) sesuai dengan alur program yang dikehendaki.
Gambar 16 tampilan menu app inventor
Gambar diatas adalah tampilan awal dari app inventor dimana pada bagian ini adalah pembuatan layout atau tampilan yang akan muncul pada layar smartphone.
Gambar 17 diagram blok program app inventor
Gambar di atas adalah digram blok perintah-perintah yang tersimpan pada setiap icon pada tampilan antar muka yang telah dbuar pada tampilan awal.
Gambar 18 tampilan antar muka pada smartphone
Gambar diatas adalah tampilan antar muka pada layar smartphone. Ini adalah contoh aplikasi yang telah dibuat menggunakan MIT app inventor dengan koneksi bluetooh sebagai komunikasinya.
2.11. Perbandingan robot x6 dan robot berbasis control smartphone
Dipasaran memang sudah tersedia robot pingpong dengan spesifikasi tertentu dan alat yang di buat pada penelitian ini bertujuan untuk mengembangkan robot yang sudah ada tentunya dengan teknologi yang lebih terkini dan berbasis mikrokontroler yang spesifikasinya bisa diubah dengan program Arduino. Robot x6 adalah robot yang dijual di tokopedia dengan harga sekitar 2000.000 dengan menggunakan 1 motor dc sebagai pelontar bola. Sedangkan rbot pingpong berbasis control smartpone mengabiskan biaya sekitar 1500.000 dengan beberapa keunggulan diaranya menggunakan 2 motor DC sebagai pelontar bola dan system
bola sirkulasi agar tidak perlu mengisi ulang bola pada bak penampung bola, dan tetntunya dengan conrolr dari smartphone dengan koneksi Bluetooth.
Gambar 19 perbandingan fisik robot x6 dan robot smartphone
KATEGORI ROBOT X6 ROBOT
SMARTPHONE
System control Saklar Smartphone app
Unit kontrol Pwm Mikrokontroller
Jenis putaran bola Spin Spin, back spin, chop