i
ROBOT PENGENDALI BOR OTOMATIS
BERBASIS AT89S51
Diajukan untuk memenuhi salah satu syarat
memperoleh gelar Sarjana Teknik pada
Program Studi Teknik Elektro
Jurusan Teknik Elektro
Fakultas Sains dan Teknologi Universitas Sanata Dharma
disusun oleh :
YOHAN KUNCORO
NIM : 055114031
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
AUTOMATIC DRILL CONTROLLING ROBOT
BASED ON AT89S51
In Partial Fullfilment of the requierments
for the degree of Sarjana Teknik
Electrical Engineering Study Program
Electrical Engineering Department
Science and Technology Faculty Sanata Dharma University
By :
YOHAN KUNCORO
NIM : 055114031
ELECTRICAL ENGINEERING STUDY PROGRAM
ELECTRICAL ENGINEERING DEPARTMENT
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
v
Saya menyatakan dengan sesungguhnya bahwa tugas akhir ini tidak memuat karya
atau bagian karya dari orang lain, kecuali yang telah disebutkan dalam kutipan dan daftar
pustaka sebagaimana layaknya karya ilmiah.
Yogyakarta, 24 Juni 2010
vi
Motto
Hal yang benar-benar kita yakini pasti akan terjadi, dan keyakinan akan suatu hal
itulah yang menyebabkanya terjadi.
(Frank Loyd Wright)
Tugas Akhir ini kupersembahkan untuk…
vii
PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN
AKADEMIS
Yang bertanda tangan dibawah ini, saya mahasiswa Universitas Sanata Dharma :
Nama
: Yohan Kuncoro
Nomor Mahasiswa
: 055114031
Demi pengembangan ilmu pengetahuan, saya memberikan kepada perpustakaan
Universitas Sanata Dharma karya ilmiah saya yang berjudul :
ROBOT PENGENDALI BOR OTOMATIS BERBASIS AT89S51
Beserta perangkat yang diperlukan (bila ada). Dengan demikian saya memberikan kepada
Perpustakaan Universitas Sanata Dharma hak untuk menyimpan, mengalihkan dalam
bentuk media lain, mengelolanya dalam bentuk pangkalan data, mendistribusikan secara
terbatas, dan mempublikasikannya di internet atau media lain untuk kepentingan akademis
tanpa perlu meminta ijin dari saya maupun memberikan royalti kepada saya selama tetap
mencantumkan nama saya sebagai penulis.
Demikian pernyataan ini yang saya buat dengan sebenarnya.
Yogyakarta, 24 Juni 2010
viii
Otomatisasi peralatan produksi sangat dibutuhkan pada masa sekarang. Hal ini
bertujuan untuk meningkatkan kualitas SDM yang ada. Dengan latar belakang tersebut
maka dibuatlah robot pengendali bor otomatis. Robot pengendali bor otomatis merupakan
robot lengan yang berfungsi untuk melakukan pengeboran secara otomatis sesuai dengan
masukan dari operator. Karena alat gerak robot ini berupa lengan-lengan robot ini memiliki
beberapa kelebihan yaitu mampu melakukan pengeboran dengan variasi sudut dan mampu
melakukan pengeboran dengan variasi titik koordinat pengeboran.
Robot ini merupakan robot yang sudah memiliki memori gerakan didalamnya.
Didalam memori robot tersebut sudah tersimpan
data base
logika gerakan setiap lengan
robot yang harus dilakukan untuk mencapai set poin sasaran pengeboran.
Data base
logika
gerakan robot meliputi urutan pengaktifan motor, arah putaran motor dan jumlah cacahan
putaran motor yang harus dilakukan setiap penggerak lengan. Sebagai penggerak lengan
robot ini menggunakan motor DC yang dilengkapi dengan
gear box
berulir, sedangkan
sebagai sensor pencacah robot ini menggunakan sensor optokopler yang dipasangkan
langsung pada ulir penggerak lengan robot.
Hasil pengamatan pada alat menunjukkan bahwa sensor pencacah sudah mampu
bekerja mendeteksi putaran motor sesuai dengan putaran yang dilakukan oleh motor
sebenarnya dan motor penggerak juga sudah mampu berputar dan berhenti sesuai dengan
arah dan jumlah putaran motor yang ditentukan. Pada beberapa hasil percobaan gerak
pengeboran, robot sudah mampu melakukan pengeboran pada set poin sasaran pengeboran
yang telah ditentukan.
ix
Nowadays, otomatization of production equipment is needed. This matter aim to
increase human source quality. With the such background therefore be made automatic
drill controlling robot. An automatic drill controlling robot is an arm robot which has
function to doing drilling automatically according to the input from operator. Because
robot’s appliance move in the form of robot’s arm that have many excesses, is able to drill
by variation corner of drilling and also doing drilling by variation point of drilling
coordinat.
This robot represent robot that has movement memory in it. Within robot’s memory
has in on file the movement logic database of each robot’s arms that must be done to reach
set drilling target point .Robot movement logic d
atabase
covering sequence activation of
motor, motor rotation direction, and amount of counter of motor rotation which must be
done by each arm activator. As arm activator this robot use DC motor and provided with
gear box have thread, While as the counter censor this robot uses optokopler censor that set
directly on activator thread of robot’s arm.
Result on perception of appliance show that counter
censor have able to detect
motor rotation according to rotation that done by true motor and motor of activator can
rotate and stop according to the direction and amount of determined motor rotation. At
some result of drilling move attemps, robot has could doing drilling at has determined
drilling target set pont.
x
Puji syukur terhadap Tuhan Yang Maha Esa atas segala karunia-Nya sehingga
penulis dapat menyelesaikan penulisan karya tugas akhir dengan judul berjudul : “Robot
Pengendali Bor Otomatis Berbasis AT89S51”.
Penulis menyadari bahwa penyelesaian tugas akhir ini tidak lepas dari segala
bantuan dan dukungan dari berbagai pihak. Oleh karena itu pada kesempatan ini penulis
ingin mengucapkan terima kasih kepada :
1. Ir. Th. Prima Ari Setiyani, M.T. selaku dosen pembimbing yang dengan penuh
kesabaran membimbing, memberikan saran dan kritik yang membantu penulis dalam
menyelesaikan tugas akhir ini.
2. Bapak dan Ibu dosen Jurusan Teknik Elektro yang telah mendidik dan mengajarkan
banyak hal yang berguna untuk masa depan penulis.
3. Seluruh laboran dan seluruh staf sekretariat prodi TE Universitas Sanata Dharma
4. Ayah, Ibu dan kedua kakak penulis yang selalu memberikan motivasi dan dorongan
baik secara moral maupun material sehingga penulis dapat menyelesaikan tugas akhir
ini tepat waktu.
5. Risty Imaniar yang selalu memberikan semangat kepada penulis.
6. Aan Patria, Markus Indrayana, Abineri, Andreaswara, Pengeran, Hari dan teman-teman
2005 yang selalu ada untuk memberikan bantuan.
7. Semua pihak yang telah banyak memberikan bantuan kepada penulis dan tidak dapat
penulis sebutkan satu persatu.
Dengan segala kerendahan hati penulis menyadari bahwa tugas akhir ini masih jauh
dari sempurna, oleh karena itu berbagai saran dan kritik untuk memperbaiki karya tugas
akhir ini sangat diharapkan. Akhir kata, semoga tugas akhir ini dapat bermanfaat yang baik
bagi semua pihak. Terima kasih.
Yogyakarta, Juli 2010
xi
HALAMAN JUDUL ... i
HALAMAN PERSETUJUAN ... iii
HALAMAN PENGESAHAN ... iv
PERNYATAAN KEASLIAN KARYA... v
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP... vi
LEMBAR PERNYATAAN PERSETUJUAN UNTUK PUBLIKASI KARYA
ILMIAH UNTUK KEPENTINGAN AKADEMIS ... vii
INTISARI ... viii
ABSTRACT ... ix
KATA PENGANTAR... x
DAFTAR ISI ... xi
DAFTAR GAMBAR... xiv
DAFTAR TABEL ... xvi
BAB I PENDAHULUAN ... 1
1.1 Latar
Belakang
... 1
1.2 Tujuan dan Manfaat Penelitian ... 1
1.3 Batasan
Masalah ... 2
1.4 Metodologi
Penelitian... 2
1.5 Sistematika
Penulisan ... 3
BAB I DASAR TEORI... 5
2.1
Penguat Transistor ... 5
2.1.1
Dasar Transistor... 5
2.1.2
Rangkaian
Fixed Bias
Transistor NPN... 6
2.1.3
Karakteristik Transistor ... 8
2.2
Penyangga Tegangan (
Voltage Buffer
) ... 9
2.3
Saklar Batas (
Limit Switch
)... 10
2.4
Kontrol Arah Putaran Motor DC ... 11
2.4.1
Prinsip Kontrol Motor DC Menggunakan Jembatan H ... 11
2.4.2
Rangkaian Jembatan H ... 12
xii
2.8
Mikrokontroler AT89S51 ... 18
2.9
Pemrograman Mikrokontroler AT89S51... 20
2.9.1
Instruksi-Instruksi MCS-51 ...
20
2.9.2
Special Function Register
(SFR)... 21
2.9.3
Program Status Word
(PSW) ...
22
2.9.4
Mode Pengalamatan ... 23
2.10 Menghitung
Error
Gerakan Jangkauan Robot... 24
2.10.1
Mencari
nilai
Error
Gerakan Terhadap Sumbu X ... 24
2.10.2
Mencari
nilai
Error
Gerakan Terhadap Sumbu Y. ... 25
2.10.3
Mencari
nilai
Error
Sudut Pengeboran... 26
BAB III PERANCANGAN PERANGKAT KERAS DAN PERANGKAT LUNAK... 27
3.1 Perancangan Mekanik Robot ... 28
3.1.1
Kerangka
Robot ...
28
3.1.2
Gerak Putar Maksimum Lengan Robot ... 29
3.1.3
Posisi
Sensor ...
31
3.2 Rangkaian
Mikrokontroler
AT89S51 ... 33
3.2.1
Pembagian Fungsi Port Mikrokontroler ... 33
3.2.2
Rangkaian Antarmuka Mikrokontroler dengan Motor ... 34
3.2.3
Antarmuka
Limit Switch
dengan Mikrokontroler ... 39
3.2.4
Antarmuka
Tombol
Kontrol
Panel dengan Mikrokontroler ... 40
3.2.5
Rangkaian
Osilator ...
41
3.2.6
Rangkaian
Reset ...
41
3.2.7
Antarmuka
Optokopler
dengan
Mikrokontroler ...
42
3.2.8
Rangkaian Catu Daya 12 Volt Variabel ... 44
3.2.9
Rangkaian Catu Daya 5 Volt ... 47
3.2.10 Perancangan Rangkaian Elektronis Keseluruhan ... 49
3.3 Perancangan Perangkat Lunak... 53
3.3.1
Subrutin
GERAK_A ...
53
3.3.2
Subrutin
GERAK_D ...
55
3.3.3
Subrutin Posisi Kalibrasi ... 56
xiii
4.1.1
Analisis
Program ...
61
4.1.2
Pencarian Algoritma Gerak Robot... 62
4.2 Pengujian Algoritma Gerak Robot... 65
4.2.1
Posisi
Kalibrasi ...
65
4.2.2
Start Position
... 67
4.2.3
Gerak Sasaran Pengeboran Pertama ... 69
4.2.4
Gerak Sasaran Pengeboran Kedua... 72
4.2.5
Gerak Sasaran Pengeboran Ketiga... 75
4.2.6
Semua
Gerak...
78
4.3 Pengujian Kecepatan Jangkauan Lengan Robot ... 80
4.4 Pengujian Rangkaian Elektronis ... 81
4.4.1
Pengujian Rangkaian Jembatan H ... 82
4.4.2
Pengujian Rangkaian Catu Daya 12 Volt Variabel ... 84
4.4.3
Pengujian Rangkaian Catu Daya 5 Volt ... 85
4.4.4
Pengujian Rangkaian Sensor ... 87
4.4.5
Pengujian Rangkaian Mikrokontroler... 88
4.5 Pengujian Bagian Robot yang Lain ... 89
4.5.1
Pengujian Rangkaian Mekanik ... 89
4.5.2
Kontrol
Panel ...
90
4.5.3
Pemasangan Sensor Optokopler ... 91
BAB V KESIMPULAN DAN SARAN ... 93
5.1
Kesimpulan ...
93
5.2
Saran
...
93
Daftar Pustaka ... 94
xiv
Gambar 1.1
Modul Pengeboran Tiga Macam Gerakan ... 2
Gambar 2.1
Transistor NPN dan Transistor PNP... 5
Gambar 2.2
Rangkaian
Fixed Bias
... 6
Gambar 2.3
Rangkaian Ekivalen DC dari Gambar 2.2 ... 6
Gambar 2.4
Loop
Basis-Emiter ... 7
Gambar 2.5
Loop
kolektor emitter ... 7
Gambar 2.6
Kurva Transistor dengan Nilai
β
dc≈
100
... 8
Gambar 2.7
Kondisi
I
C(sat)pada
Fixed-Bias
... 9
Gambar 2.8
Rangkaian
Buffer
Tegangan ... 10
Gambar 2.9
Kondisi
Limit Switch
NO dan Kondisi
Limit Switch
NC ... 10
Gambar 2.10 Kontrol Motor DC Menggunakan Jembatan H ... 11
Gambar 2.11 Rangkaian Jembatan H. ... 12
Gambar 2.12 Analisis DC Rangkaian Jembatan H. ... 13
Gambar 2.13 Simbol Komponen LED ... 16
Gambar 2.14 Sensor Optokopler ... 16
Gambar 2.15 Pemasangan Mekanik Sensor Optokopler... 16
Gambar 2.16 Hasil Gelombang Picu
Schimit Trigger
... 17
Gambar 2.17 Diagram Blok IC 74LS14... 17
Gambar 2.18 Konfigurasi Pin Mikrokontroler AT89S51 ... 19
Gambar 2.19 Mencari Nilai
Error
Gerakan Terhadap Sumbu X... 24
Gambar 2.20 Mencari nilai
Error
terhadap sumbu Y ... 25
Gambar 2.21 Mencari nilai
Error
Sudut Pengeboran ... 26
Gambar 3.1
Diagram Kotak Robot Pengendali Bor Otomatis ... 27
Gambar 3.2
Kerangka Robot Pengendali Bor Otomatis ... 29
Gambar 3.3
Jangkauan Maksimum Gerak Robot ... 30
Gambar 3.4
Posisi Sensor Robot Pengendali Bor Otomatis ... 31
Gambar 3.5
Perancangan Mekanik Posisi Sensor Pencacah ... 32
Gambar 3.6
Penguat Arus
ON-OFF
... 35
Gambar 3.7
Rangkaian Sensor
Limit Switch
... 39
xv
Gambar 3.11 Rangkaian Sensor Optokopler Sebagai Pencacah ... 43
Gambar 3.12 Catu Daya 12 Volt ... 45
Gambar 3.13 Rangkaian Catu Daya 5 Volt ... 48
Gambar 3.14 Rangkaian Sensor Pencacah ... 49
Gambar 3.15 Rangkaian Sakar Elektris Motor
Drill
... 50
Gambar 3.16 Rangkaian Jembatan H Untuk Motor DC... 50
Gambar 3.17 Perancangan Rangkaian Mikrokontroler Secara Keseluruhan ... 51
Gambar 3.18 Diagram Alir Utama Mikrokontroler ... 52
Gambar 3.19 Subrutin Gerak_A... 54
Gambar 3.20 Subrutin GERAK_D... 55
Gambar 3.21 Subrutin Posisi Kalibrasi ... 56
Gambar 3.22 Contoh Algoritma Gerak Robot ... 58
Gambar 4.1
Hasil Pembuatan Robot Pengendali Bor Otomatis... 60
Gambar 4.2
Robot Dalam Keadaan Posisi Kalibrasi
...
66
Gambar 4.3
Robot Dalam Keadaan
Start Position...
68
Gambar 4.4
Robot Mencapai Titik Pengeboran Sasaran Pertama ... 70
Gambar 4.5 Robot Mencapai Titik Pengeboran Sasaran Kedua ... 73
Gambar 4.6
Robot Mencapai Titik Pengeboran Sasaran Ketiga... 71
Gambar 4.7
Blok Rangkaian Elektronis Pengontrol Robot ... 82
Gambar 4.8
Kontrol Panel Pengendali Robot ... 90
xvi
Tabel 2.1
Tabel Kebenaran Jembatan H... 12
Tabel 2.2
Warna dan Nilai Tegangan Ambang LED ... 15
Tabel 2.3
Tabel Kebenaran IC 74LS14 ... 18
Tabel 2.4
Fitur Khusus Port 3... 20
Tabel 3.1
Tombol Panel Kontrol pada Mikrokontroler ... 28
Tabel 3.2
Ukuran Mekanik Kerangka Robot... 31
Tabel 3.3
Pembagian Fungsi Port Mikrokontroler ... 33
Tabel 3.4
Contoh Algoritma Gerak Robot ... 59
Tabel 4.1
Data Base
Urutan Pengaktifan Motor Robot Menuju
Start Position...
62
Tabel 4.2
Data Base
Urutan Pengaktifan Motor Robot Menuju Sasaran Bor
Pertama ... 63
Tabel 4.3
Data Base
Pengaktifan Motor Robot Menuju Sasaran Bor Kedua ... 63
Tabel 4.4
Data Base
Urutan Pengaktifan Motor Robot Menuju Sasaran Bor
Ketiga ...
64
Tabel 4.5
Data Hasil Percobaan Posisi Kalibrasi ... 67
Tabel 4.6
Hasil Pengujian
Data Base
Pengaktifan Motor Robot Menuju
Start
Position...
68
Tabel 4.7
Parameter Jangkauan dan
Set Point
Start Position...
69
Tabel 4.8
Data Hasil Percobaan
Start Position ...
69
Tabel 4.9
Hasil Pengujian
Data Base
Pengaktifan Motor Sasaran Pengeboran
Pertama ...
70
Tabel 4.10
Parameter Jangkauan dan
Set Point
Sasaran Pengeboran Pertama ... 71
Tabel 4.11
Data Hasil Percobaan Gerak Sasaran Pengeboran Pertama ... 71
Tabel 4.12
Hasil Uji
Data Base
Pengaktifan Motor Sasaran Bor Kedua... 72
Tabel 4.13
Parameter Jangkauan dan
Set Point
Sasaran Pengeboran Kedua ... 74
Tabel 4.14
Data Hasil Percobaan Gerak Sasaran Pengeboran Kedua ... 74
Tabel 4.15
Hasil Uji
Data Base
Pengaktifan Motor Sasaran Bor Ketiga... 75
Tabel 4.16
Parameter Jangkauan dan
Set Point
Sasaran Pengeboran Ketiga... 77
Tabel 4.17
Data Hasil Percobaan Gerak Sasaran Pengeboran Ketiga... 77
xvii
Tabel 4.21
Hasil Data Pengujian Pembebanan Jembatan H dengan Motor DC... 84
Tabel 4.22
Hasil Data Pengujian Pembebanan Catu Daya 12 Volt... 85
Tabel 4.23
Hasil Data Pengujian Catu Daya 5 Volt ... 86
Tabel 4.24
Hasil Data Pengujian Rangkaian Sensor ... 87
Tabel 4.25
Hasil Data Pengujian Rangkaian Mikrokontroler ... 88
Tabel 4.26
Data Hasil Pengukuran Mekanik Robot ... 89
Tabel 4.27
Data Hasil Pengukuran Besar Sudut Jangkauan Minimum Antar
Lengan ...
89
BAB I
PENDAHULUAN
1.1 Latar Belakang
Otomatisasi peralatan produksi sangat dibutuhkan pada masa sekarang. Hal ini
bertujuan untuk meningkatkan kualitas SDM yang ada.
Karena kurangnya otomatisasi peralatan tidak jarang untuk setiap satu bagian
proses produksi harus dipegang oleh beberapa orang dan pekerjaan yang dilakukan sama
berulang-ulang secara terus menerus tanpa ada perubahan. Jika bagian proses produksi
tersebut mampu dikerjakan oleh sebuah mesin, maka SDM yang ada dapat lebih
dimanfaatkan untuk menjadi pemikir ide baru dan tidak hanya sebagai pekerja tenaga kasar
saja.
Dengan latar belakang itulah maka penulis merancang suatu alat produksi yang
mempermudah seseorang dalam melakukan pekerjaan pengeboran secara otomatis.
Pekerjaan pengeboran ini dilakukan oleh robot pengendali bor otomatis. Robot ini
menggunakan lengan-lengan untuk mengatur posisi mata bor sehingga pengeboran dapat
dilakukan tepat pada titik sasaran. Kelebihan robot ini adalah karena terdiri dari tiga
lengan, maka robot ini mampu menjangkau objek pengeboran dua absis yang berlekuk.
Di dalam memori robot pengendali bor otomatis sudah dilengkapi
program-program gerakan pengeboran yang mampu dilakukan oleh robot. Untuk memilih program-program
gerakan tersebut, disediakan sebuah kontrol panel yang berisi tombol-tombol gerakan
pengeboran. Jika operator menginginkan salah satu gerakan robot yang sudah tersimpan
pada memori, operator hanya cukup menekan salah satu tombol gerakan yang diinginkan
pada kontrol panel.
1.2 Tujuan dan Manfaat Penelitian
Tujuan yang akan dicapai yaitu merancang dan membuat suatu model lengan robot
pengendali bor otomatis dengan memanfaatkan motor DC sebagai penggerak robot,
AT89S51 sebagai pengendali dan penyimpan memori. Selain itu diharapkan penelitian ini
1) Meningkatkan pemanfaatan SDM di bidang industri.
2) Sebagai acuan untuk dapat lebih memahami fungsi dan karakteristik
komponen-kompenen elektronik maupun mekanik yang digunakan dalam perancangan
sehingga memperdalam ilmu pengetahuan di bidang robotika.
1.3 Batasan Masalah
Secara menyeluruh penelitian ini dibatasi pada:
1) Mikrokontroler AT89S51 digunakan sebagai pengendali utama robot.
2) Menggunakan motor DC sebagai penggerak utama setiap lengan robot.
3) Operator memilih gerakan robot melalui tombol-tombol pada kontrol panel.
4) Robot memiliki kemampuan menyimpan tiga macam gerakan pengeboran.
5) Modul pengeboran untuk tiga gerakan robot seperti pada gambar 1.1.
Gambar 1.1 Modul Pengeboran Tiga Macam Gerakan
1.4 Metodologi penelitian
Metodologi penelitian yang digunakan dalam penyusunan dan penulisan tugas
1) Studi kepustakaan mencakup literatur – literatur, dan gambar-gambar manual yang
didapat dari perpustakaan, buku, dan internet.
2) Perancangan dan pembuatan sebuah sistem rangkaian elektronika yang meliputi
rangkaian jembatan H, rangkaian mikrokontroler dan rangkaian sensor optokopler.
3) Perancangan dan pembuatan sebuah sistem mekanik berupa lengan robot yang
mampu bergerak dalam dua absis bidang gerak.
4) Perancangan dan pembuatan software mikrokontroler AT89S51 dengan
menggunakan bahasa Asembly.
5) Pengambilan data kinerja alat yang telah dibuat, meliputi jangkauan gerak robot,
output sensor optokopler dan besar konsumsi daya yang dibutuhkan pada beberapa
bagian komponen elektronik.
6) Menganalisa hasil pengujian dan membandingkannya dengan teori yang ada.
7) Mengambil kesimpulan dari perancangan dan pengujian yang telah dilakukan.
1.5 Sistematika Penulisan
Sistematika penulisan karya ilmiah ini terdiri dari 3 bab yang tersusun sebagai
berikut :
Pendahuluan
Pendahuluan berisi tentang latar belakang masalah, perumusan masalah,
batasan masalah, tujuan dan manfaat penelitian serta sistematika penulisan.
Dasar Teori
Dasar teori yang membahas tentang gambaran secara umum, teori dasar
mengenai robot pengendali bor otomatis yang mencakup dasar teori untuk
bagian-bagian secara garis besar.
Perancangan Robot Pengendali bor Otomatis
Bab ini menguraikan mengenai blok diagram perancangan alat, perancangan
perangkat keras, dan flowchart perangkat lunak yang mendukung bekerjanya
peralatan sesuai dengan sistem perancangannya.
Hasil dan Pembahasan
Bab ini berisi hasil pengujian dan pembahasan dari pengujian yang telah
dilakukan. BAB I :
BAB II :
BAB III:
Kesimpulan dan Saran
Bab ini berisi kesimpulan yang diambil dari analisis data pengujian yang telah
BAB II
DASAR TEORI
2.1 Penguat
Transistor
Untuk menguatkan arus keluaran dari mikroposesor, dapat menggunakan transistor
bipolar yang disusun secara bertingkat supaya diperoleh penguatan arus yang besar. Selain
sebagai penguat arus, rangkaian transistor ini juga dapat dimanfaatkan sebagai rangkaian
penyaklar elektris.
2.1.1 Dasar Transistor
Transistor adalah komponen tiga terminal. Ketiga terminal tersebut disebut Basis
(B), Kolektor (C), dan emiter (E). Ada 2 jenis transistor yaitu PNP dan NPN seperti terlihat
pada gambar 2.1. [1]
C E
B
E
B
C
(a) (b)
Gambar 2.1 (a) Transistor NPN dan (b) Transistor PNP
Dalam dasar teori ini, transistor yang akan dibahas adalah transistor jenis NPN.
Ada beberapa syarat untuk membuat transistor tipe NPN dapat bekerja antara lain : [1]
1) Sambungan basis-emiter harus diberi bias maju. (dengan kondisi tegangan bias maju
> 0.7 volt untuk transistor silikon dan tegangan bias maju > 0.3 Volt untuk transistor
germanium).
2) Sambungan basis-kolektor harus dibias balik dengan kondisi tegangan bias balik
yang masih berada dalam batas kemampuan komponen.
Rangkaian fixed-bias sering digunakan sebagai rangkaian pembias transistor NPN
supaya dapat bekerja baik dalam kondisi saturasi, cut-off maupun pada titik kerja linear.
2.1.2 Rangkaian
Fixed Bias Transistor NPN
RC RB
-+
-+
IB IC
VBE VCC
E B
C
VCE
Gambar 2.2 Rangkaian Fixed Bias [1]
Fixed-bias adalah salah satu bias DC transistor yang praktis. Model rangkaian
fixed-bias dapat dilihat seperti pada gambar 2.2. Untuk memudahkan dalam menganalisa
rangkaian pada gambar 2.2, maka catu tegangan Vcc dapat dipisahkan menjadi 2 buah catu
tegangan, yaitu masing-masing Vcc terhubung dengan RC dan RB seperti ditunjuk pada
gambar 2.3. Pada rangkaian gambar 2.3 terdapat dua buah loop arus yang membias
transistor yaitu loop arus IB dan loop arus IC.
RC RB
-+
-+
IB IC
VBE VCC
E B
C
VCE VCC
Gambar 2.3 Rangkaian Ekivalen DC dari Gambar 2.2 [1]
Bias Maju Basis-Emiter
Dari rangkaian gambar 2.3 dapat diperoleh loop arus bias maju dari basis ke emiter
Gambar 2.4 Loop Basis-Emiter [1]
Dengan menerapkan Hukum Kirchoff, dapat diperoleh persamaan : [1]
B B
RB I R
V = * ...(2.1)
0 = − −
+VCC VRB VBE ...(2.2)
0
* − =
−
+VCC IB RB VBE ...(2.3)
B BE CC B
R V V
I = − ...(2.4)
Loop Kolektor-Emiter
Gambar 2.5 Loop kolektor emitter [1]
Terdapat penguatan arus pada transistor yang dilambangkan dengan β. Hubungan
B
C I
I =β* ...(2.5)
Dengan begitu dapat diketahui bahwa pada dasarnya besar nilai arus IC sangat tergantung
dengan besar nilai arus IB. Jika diketahui besarnya nilai arus IC seperti pada persamaan
(2.5), kita dapat menganalisa rangkaian pada gambar 2.5 yang merupakan loop arus pada
kaki kolektor hasil pemisahan dari gambar 2.3.
Dengan mengaplikasikan Hukum Kirchoff Tegangan pada gambar 2.5, dapat
diperoleh persamaan :[1]
0
* − =
+ C C CC
CE I R V
V ...(2.6)
C C CC
CE V I R
V = − * ...(2.7)
2.1.3 Karakteristik Transistor
Kurva karakteristik kolektor merelasikan IC dan VCE dengan IB sebagai parameter.
Pada gambar 2.6 terlihat bahwa kurva kolektor terbagi menjadi tiga daerah kerja, yaitu
kondisi transistor jenuh, transistor aktif dan dan transistor cut-off . [1]
Gambar 2.6 Kurva Transistor dengan Nilai βdc ≈100
1) Daerah jenuh (saturasi), adalah daerah dengan VCE kurang dari tegangan lutut
(knee) VK. Daerah jenuh terjadi bila sambungan emiter dan sambungan basis
2) Daerah aktif adalah daerah antara tegangan lutut VK dan tegangan dadal
(breakdown) VBR serta di atas IB =ICO. Daerah aktif terjadi bila sambungan emiter
diberi prasikap maju dan sambungan kolektor diberi prasikap balik. Pada daerah
aktif arus kolektor sebanding dengan arus basis. Penguatan sinyal masukan menjadi
sinyal keluaran yang paling baik terjadi pada daerah aktif.
3) Daerah cut-off (putus) terletak di bawah IB =ICO. Sambungan emiter dan
sambungan kolektor berprasikap balik. Pada daerah ini IE =0;IC = ICO = IB.
Titik Saturasi Transistor
Titik saturasi transistor dapat dilihat pada kurva gambar 2.6 dengan nilai tegangan
) (sat CE
V ≅0. Karena nilai tegangan VCE(sat)≅0, maka seolah-olah antara kaki kolektor dan
emiter terhubung singkat (lihat rangkaian gambar 2.7) dan nilai tegangan pada RC sama
dengan nilai tegangan pada VCC (VRC =VCC). [1]
Besarnya nilai arus saturasi (IC(sat)) kolektor dari rangkaian fixed bias pada gambar
2.7 adalah : [1]
C CC sat C
R V
I ( ) = ...(2.8)
Gambar 2.7 Kondisi IC(sat) pada Fixed-Bias [1]
2.2
Penyangga Tegangan (Voltage Buffer)
Buffer (penyangga) adalah rangkaian op-amp yang digunakan untuk mencegah
sinyal masukan dari sebuah beban dengan menggunakan rangkaian yang memiliki unity
voltage gain, dengan tanpa pembalikkan fasa atau polaritas, dan bekerja sebagai rangkaian
ideal dengan impedansi masukan yang sangat tinggi dan impedansi keluaran yang rendah.
Gambar 2.8 menunjukkan koneksi op-amp yang menunjukan operasi buffer amplifier.
Tegangan keluaran pada buffer akan sama dengan tegangan masukannya.[1]
Gambar 2.8 Rangkaian Buffer Tegangan
2.3 Saklar
Batas
(Limit Switch)
Saklar batas atau lebih dikenal dengan Limit switch merupakan salah satu jenis
kontak yaitu komponen yang berfungsi untuk menghubungkan dan memutuskan arus. Sifat
dari limit switch ini yaitu kontak yang terputus atau tersambung saat ditekan dan akan
kembali ke keadaan semula saat tidak ditekan (momentary contact). Pada limit switch
terdapat tiga terminal yaitu common (COM), terminal normally open (NO) dan terminal
normally closed (NC).
(a) (b)
Gambar 2.9 Kondisi Limit Switch NO (a) dan Kondisi Limit Switch NC (b)
Terminal NO merupakan terminal yang pada kondisi normal berupa kontak
terputus atau tidak tersambung dengan COM, sedangkan terminal NC berupa kontak yang
pada kondisi normal tersambung dengan COM. Setiap titik sambungan pada limit switch
terbuat dari bahan yang tahan busur api (arc) untuk menghindari kerusakan saklar akibat
panas atau percikan api yang disebabkan aliran arus mendadak saat saklar terputus atau
2.4
Kontrol Arah Putaran Motor DC
Rangkaian jembatan H diperlukan sebagai rangkaian antarmuka antara motor
dengan mikrokontroler. Jembatan H disini dimanfaatkan sebagai penguat arus keluaran
dari mikrokontroler sekaligus difungsikan sebagai pengontrol arah putaran motor DC.
2.4.1 Prinsip Kontrol Motor DC Menggunakan Jembatan H
Gambar 2.10 Kontrol Motor DC Menggunakan Jembatan H [2]
Pada dasarnya jembatan H bekerja seperti sebuah saklar. Cara kerja secara umum
dari jembatan H ini dapat dilihat dari gambar 2.10. Ketika saklar 1, saklar 2, saklar 3 dan
saklar 4 kondisi terbuka, tidak ada arus yang mengalir melalui motor dari power supply
sehingga motor tidak berputar. Jika saklar 1, saklar 2 kondisi terhubung sementara saklar 3,
saklar 4 kondisi terbuka, maka akan terjadi loop arus dari power supply yang masuk
melalui kaki “a” motor dan keluar melalui kaki “b” motor sehingga motor akan berputar
CW. Jika saklar 1, saklar 2 terbuka dan saklar 3, saklar 4 tertutup, akan terjadi loop arus
yang berkebalikan yaitu arus dari power supply akan masuk melalui kaki “b” motor dan
2.4.2 Rangkaian Jembatan H
Gambar 2.11 Rangkaian Jembatan H [3]
Rangkaian jembatan H dapat dilihat seperti pada gambar 2.11. Pin masukan VA
dan VB dapat dihubungkan langsung ke port keluaran mikrokontroler sebagai pengendali
arah putaran motor. Keluaran rangkaian buffer digunakan sebagai sumber catu tegangan
basis transistor penguat mula. Saat GND dihubungkan ke ground dan salah satu pin VA
atau VB diberi catu tegangan, rangkaian jembatan H dapat aktif dan dapat memutar motor
DC sesuai dengan arah loop arus yang melewati motor DC tersebut. Tabel kebenaran
jembatan H ini dapat dilihat pada tabel 2.1.
Tabel 2.1 Tabel Kebenaran Jembatan H [3]
Input Output
In_A In_B A B
0 0 0 0
1 0 1 0
0 1 0 1
Dari rangkaian gambar 2.11 jika kondisi VA dihubungkan ke sebuah sumber
tegangan, VB dan GND dihubungkan ke ground dan Op-Amp yang digunakan ideal,
dapat diperoleh analisa rangkaian seperti pada gambar 2.12. Ada beberapa syarat supaya
rangkaian jembatan H dapat aktif, antara lain tegangan catu yang diberikan harus lebih dari
tegangan ambang yang terdapat pada Q2 dan Q3.
Gambar 2.12 Analisis DC Rangkaian Jembatan H
Perhitungan arus dan tegangan DC dari gambar 2.12 adalah sebagai berikut :
Analisis rangkaian pada transistor Q1:
Jika diketahui R1 adalah resistor antara node A dengan kaki basis transistor Q1, R2
adalah resistor antara ground dengan kaki basis transistor Q1, dan Vf1 adalah tegangan
antara kaki basis-emiter transistor Q3, maka nilai IB3, VR1, IR1, IB2 dapat dicari dengan
cara berikut :
A In R R
R
VR * _
2 1
2
2 ⎟⎟
⎠ ⎞ ⎜⎜
⎝ ⎛
+
= ...(2.9)
2 1
1 2 2
//R R
V V
2 2 3 R V I R
B = ...(2.11)
2 1 1 B B
R I I
I = + ...(2.12)
Analisis rangkaian Transistor Q2
Transistor Q2 merupakan transistor penguat mula yang berfungsi untuk
mengaktifkan transistor Q3 dan Q4. Jika diketahui R3 adalah resistor pada kaki basis
transistor Q2, R4 adalah resistor antara kaki emiter transistor Q2 dengan kaki basis
transistor Q3, Vf2 adalah tegangan antara kaki basis-emiter transistor Q2 dan Vf3 adalah
tegangan antara kaki basis-emiter transistor Q1, maka dengan analisis rangkaian transistor
dapat diperoleh perhitungan sebagai berikut :
3 4 2 3
_A VR Vf VR Vf
In = + + + ...(2.13)
3 4 1 2 3
1* *
_A IB R Vf IE R Vf
In = + + + ...(2.14)
3 4 1 2 2 3
1* ( 1) *
_A IB R Vf Q IB R Vf
In = + + β + + ...(2.15)
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − − = + + 1 3 2 2 4 3 _ ) 1 ( B f f Q I V V A In R
R
β
...(2.16)) 1 ( _ 4 3 3 2
1 + +
− − = β R R V V A In
IB f f ...(2.17)
Berdasarkan nilai IB1, IB2 dan IB3, dapat dicari nilai ITotal dengan rumus berikut :
3 2 1 B B B
Total I I I
I = + + ...(2.18)
Setelah diperoleh nilai IB1, dengan adanya penguatan transistor Q2(βQ2) dapat diperoleh
nilai IC1 dan IE1 sebagai berikut :
1 2 1 Q * B
C I
I =β ...(2.19)
1 1 1 C B
E I I
I = + ...(2.20)
B B Q
E I I
I 1=β 2* + ...(2.21)
1 2 1 ( Q 1) B
E I
Analisis rangkaian transistor Q3 dan transistor Q4
Transistor Q3dan Q4 adalah tansistor penguat paling akhir yang terhubung langsung ke
beban motor. Jika diketahui IE1 adalah arus basis yang mengalir pada kaki basis Q3 dan
3
Q
β adalah penguatan arus transistor Q3, maka nilai IC3 dapat dicari persamaan sebagai
berikut :
(
3 1)
3 Q * E
C I
I = β ...(2.23)
Pada transistor Q4 juga mengalir arus kolektor IC4 yang dapat dicari dengan dengan
perhitungan berikut:
(
4 1)
4 Q * C
C I
I = β ...(2.24)
Karena ada dua transistor yang terhubung langsung ke beban motor, maka nilai arus yang
akan mengalir melalui motor adalah arus kolektor terbesar antara Q3 dan Q4 (dalam hal
ini antara arusIC3 dan arusIC4).
2.5
Light Emiting Diode (LED)
LED adalah sebuah dioda yang dapat memancarkan cahaya sehingga memiliki
kutup pada setiap kakinya dan memiliki tegangan jatuh. Nilai tegangan jatuh pada LED
ditentukan oleh warna cahaya yang dipancarkan seperti pada tabel 2.2.
Tabel 2.2 Warna dan Nilai Tegangan Ambang LED
No Warna Tegangan Jatuh (Volt)
1 Inframerah 1.6
2 Merah 1.8- 2.1
3 Jingga 2.2
4 Kuning 2.4
5 Hijau 2.6
Arah arus konvensional pada LED hanya dapat mengalir dari kaki anoda ke kaki
katoda. Besarnya arus yang mengalir ini sangat menentukan tingkat kecermelangan cahaya
LED. Nilai arus normal yang mengalir pada LED adalah sekitar 10 – 20 mA, namun jika
LED dapat dinaikkan sampai sebesar 50 mA. Simbol komponen LED dapat dilihat pada
gambar 2.13.
Gambar 2.13 Simbol Komponen LED [3]
2.6 Sensor
Optokopler
Sensor Optokopler terdiri atas LED inframerah dan fototransistor serta dirancang
supaya mampu membaca putaran rotary encorder yang dilewatkan melalui celah
optokopler. Jika rotary encorder berputar, sinar infra merah yang diterima fototransistor
menjadi putus-putus dan akan menimbulkan pulsa-pulsa listrik. Pulsa listrik ini kemudian
dapat diolah sehingga nantinya dapat memberikan keluaran seperti yang diinginkan oleh
pengguna. LED inframerah pada optokopler yang digunakan hanya mampu melewatkan
arus maksimal sebesar 20 mA. Gambar 2.14 merupakan Simbol optocoupler dan cara
pemasangannya dapat dilihat pada gambar 2.15.
Gambar 2.14 Sensor Optokopler [4]
Cara kerja dari rangkaian sensor optokopler adalah sebagai berikut :
1) Saat piringan rotary encorder berputar, maka lubang pada piringan tersebut juga ikut
berputar.
2) Lubang tersebut dideteksi oleh sensor optokopler dan menghasilkan keluaran dari
optokopler berupa pulsa listrik.
3) Pada saat sensor optokopler bertemu lubang pada piringan rotary encorder maka
sinar inframerah akan tembus sehingga sensor optokopler mengalirkan arus listrik ke
output sensor, sedangkan apabila celah optokopler tertutup maka sensor optokopler
akan berhenti mengalirkan arus listrik.
2.7 Inverter
Schmitt Triggers 74LS14
Inverter schmitt trigger adalah komponen yang berfungsi untuk membersihkan
sinyal digital dari gangguan sinyal analog dan mengubah sinyal digital yang lambat naik
atau turun menjadi sinyal digital yang cepat naik dan cepat turun seperti ditunjukkan pada
gambar 2.16.
Gambar 2.16 Hasil Gelombang Picu Schimit Trigger [4]
IC schmitt trigger yang banyak dijumpai di pasar adalah 74LS14 dengan 6 buah
pin masukan dan 6 buah pin keluaran. Diagram Blok IC 74LS14 ditunjukan pada gambar
2.17 dan untuk tabel kebenarannya seperti ditunjuk pada tabel 2.3.
Tabel 2.3 Tabel Kebenaran IC 74LS14 [4]
INPUT OUTPUT
0 1
1 0
Keterangan : 0 = logika rendah
1 = logika tinggi
2.8
Mikrokontroler AT89S51
Mikrokontroler AT89S51 merupakan salah satu keluarga dari MCS-51 keluaran
Atmel. Jenis mikrokontroler ini pada prinsipnya dapat digunakan untuk mengolah data
perbit maupun 8 bit secara bersamaan. Sebuah mikrokontroler dapat bekerja apabila di
dalam mikrokontroler tersebut terdapat program yang berisikan instruksi-instruksi yang
akan digunakan untuk menjalankan sistem mikrokontroler tersebut. Pada prinsipnya
program pada mikrokontroler dijalankan secara bertahap. Maksudnya, pada program itu
sendiri terdapat beberapa set instruksi yang mana tiap instruksi itu dijalankan secara
berurutan. [5][6]
Beberapa fasilitas yang dimiliki oleh mikrokontroler AT89S51 adalah sebagai
berikut: [5][6]
1) Sebuah Central Processing Unit 8 bit.
2) Oscilator internal dan rangkaian pewaktu
3) RAM internal 128 byte
4) Flash memori 4 Kbyte
5) Lima buah jalur interupsi (dua buah interupsi eksternal dan tiga buah interupsi
internal)
5) Empat buah programable port I/O yang masing masing terdiri dari delapan buah
I/O.
6) Sebuah port serial dengan kontrol serial full duplex UART.
Konfigurasi pin pada mikrokontroler AT89S51 dapat dilihat pada gambar 2.18. Penjelasan
untuk masing-masing pin mikrokontroler adalah sebagai berikut:
Gambar 2.18 Konfigurasi Pin Mikrokontroler AT89S51 [6]
1) Pin 40. Vcc, merupakan catu daya mikrokontroler.
2) Pin 20. GND, digunakan sebagai ground
3) Pin 23-39. Port 0, merupakan port paralel 8 bit dua arah. Posisi low significant bit
(LSB) terletak pada pin 39 dan Most Significant Bit (MSB) terletak pada pin 32.
4) Pin 1-8. Port 1, merupakan port paralel 8 bit 2 arah. Posisi (LSB) terletak pada pin 1
dan (MSB) terletak pada pin 8.
5) Pin 21-28. Port 2, merupakan port paralel 8 bit dua arah. Port ini mengirim byte
alamat-alamat bila dilakukan pengaksesan memori eksternal. LSB terletak pada pin
21 dan MSB pada pin 28.
6) Pin 10-17. Port 3, merupakan port paralel 8 bit 2 arah. Posisi (LSB) terletak pada pin
10 dan (MSB) terletak pada pin 17. Port ini memiliki beberapa fungsi khusus seperti
pada tabel 2.4.
7) Pin 9. Reset (RST), pada kondisi high akan aktif.
8) Pin 30. ALE/PROG, digunakan untuk menahan alamat memori eksternal selama
9) Pin 29, Program Store Enable (PSEN) merupakan Strobe pembacaan ke memori
eksternal.
10) Pin 31, EA/Vpp saat kondisi low maka mikrokontroler menjalankan
instruksi-instruksi yang ada pada memori internal.
11) Pin 19, XTAL 1 sebagai masukan dari rangkaian osilator.
12) Pin 18, XTAL 2 sebagai keluaran dari rangkaian osilator.
Tabel 2.4 Fitur Khusus Port 3
Pin pada port 3 Fungsi pengganti
P3.0 RxD (Port input serial)
P3.1 TxD (Port output serial)
P3.2 INT0 (Interrupt eksternal 0)
P3.3 INT1 (Interrupt eksternal 1)
P3.4 T0 (Input eksternal timer 0)
P3.5 T1 (Input eksternal timer 1)
P3.6 WR (Perintah write pada memori eksternal)
P3.7 RD (Perintah read pada memori eksternal)
2.9 Pemrograman
Mikrokontroler AT89S51
Semua mikrokontroler termasuk MCS-51 dapat menggunakan bahasa
pemrograman yang sama yaitu MCS-51 Assembly Language. Kumpulan instruksi berupa
kode-kode dengan panjang 1-4 byte setiap instruksi. Pemrogramannya disesuaikan dengan
kemampuan dan fitur yang dimiliki masing-masing jenis atau seri mikrokontroler tersebut.
[5][6]
2.9.1 Instruksi-Instruksi AT89S51
Instruksi mikroprosesor AT89S51 secara umum dikelompokkan menjadi :
a. Operasi Aritmatika
Yang termasuk dalam kelompok ini adalah instruksi penambahan (ADD, ADDC,
INC), pengurangan (SUBB, DEC), perkalian (MULL), pembagian (DIV), dan
b. Operasi Logika
Meliputi instruksi and (ANL), or (ORL), xor (XRL), clear (CLR), rotasi (RL, RLC,
RR, RRC), komplemen (CPL), dan pertukaran nibble dalam accumulator (SWAP).
c. Transfer Data
Meliputi instruksi penyalinan data (MOV, MOVC, MOVX), penyimpan dan
pengambil pada stack (PUSH, POP), dan pertukaran data (XCH, XCHD).
d. Operasi Bolean
Terdiri dari instruksi untuk carry dan bit, antara lain clear (CLR), set bit (STB),
komplemen (CPL), ANL, ORL, MOV, dan instruksi jump yang mengacu pada carry dan bit
seperti JC, JNC, JB, dan JBC.
e. Operasi Pencabangan
Terdiri dari instruksi pemanggilan sub rutin (ACALL, LCALL), kembali dari sub
rutin (RET), kembali dari interupsi (RETI), lompatan relatif maupun dengan syarat (AJMP,
SJMP, JMP, JZ, CJNE, DJNZ). Ada juga instruksi agar dalam satu siklus clock tidak
terjadi operasi, yaitu NOP.
2.9.2
Special Function Register (SFR)
Special Function Register (SFR) adalah register-register yang mempunyai fungsi
khusus, diantaranya ada yang digunakan untuk mengatur input atau output data dari
mikrokontroler. Sebagai contoh register P0, P1, P2 dan P3 digunakan sebagai register
untuk menampung data input atau output. Selain itu juga ada SFR yang digunakan untuk
mengatur dan memantau kondisi UART, yaitu register SCON. Register yang digunakan
untuk mengatur kerja timer adalah register TCON.
Special Function Register terdapat pada ruang memori RAM yang mempunyai
alamat 80H sampai FFH. Tidak semua alamat itu dipakai oleh SFR. Pada Special Function
Register terdapat beberapa alamat yang bisa dialamati secara bit dan ada yang tidak bisa
dialamati secara bit.
a. Accumulator
Accumulator merupakan register yang berfungsi untuk menyimpan data sementara.
Register accumulator sering digunakan dalam proses aritmatika, logika, pengambilan data,
b. Register B
Register B dapat digunakan untuk proses aritmatika dan dapat juga difungsikan
sebagai register biasa.
c. Register Port
Terdapat 4 buah register port, yaitu register port 0, port 1, port 2, port 3. Register
port ini digunakan sebagai sarana input atau output untuk menyimpan data dari atau ke port
masing-masing P0, P1, P2, P3.
d. Register Timer
Mikrokontroler AT89S51 mempunyai dua buah register 16 bit timer, yaitu timer 0
dan timer 1. Timer 0 dibentuk oleh register TH0 dan TL0. Timer 1 dibentuk oleh register
TH1 dan TL1. Perilaku register TH0, TH1, TL0 dan TL1 diatur oleh register TMOD dan
register TCON.
e. Register Control
Ada beberapa register yang berisi bit-bit kontrol dan status untuk sistem interupsi,
pencacah, atau pewaktu, dan port serial, yaitu register-register IP (Interupt Enable),
TMOD (Timer Mode), TCON (Timer Control), SCON (Serial Control), dan PCON (Power
Control).
1) Register IP digunakan untuk mengatur prioritas dari masing-masing interupsi.
2) Register IE digunakan untuk mengaktifkan atau menonaktifkan sarana interupsi. IE.0
sampai IE.6 mengatur masing-masing sumber interupsi, sedangkan IE.7 mengatur
interupsi secara keseluruhan. Jika IE.7 bernilai 0 maka sisterm interupsi akan
menjadi nonaktif atau keadaan IE.0 sampai IE.6 tidak diperhatikan
3) Register TMOD digunakan untuk mengatur mode kerja timer 0 dan timer1.
4) Register TCON digunakan untuk memulai atau menghentikan proses pencacah timer,
mengatur sinyal interupsi dari INT0 atau INT1, serta memantau apakah ada sinyal
yang masuk ke INT0 atau INT1.
5) Register SCON digunakan untuk mengatur perilaku dari UART yang diantaranya
adalah memantau proses pengiriman dan penerimaan data seri.
6) Register PCON digunakan untuk mengatur pemakaian daya pada IC.
2.9.3
Program Status Word (PSW)
Register PSW berisi informasi status program yang mana masing masing bit
a. Stack Pointer
Register stack pointer merupakan register 8 bit yang terletak pada alamat 81H yang
mempunyai fungsi untuk menyimpan alamat data pada saat terjadi interupsi.
b. Data Pointer
Register data pointer atau DPTR merupakan register 16 bit yang terdiri dari data
pointer high byte (DPH) dan data pointer low byte (DPL).
c. Serial Buffer
Serial data buffer terletak pada lokasi 99H yang dibagi menjadi 2 register yang
terpisah yaitu transmit buffer dan receive buffer. Saat data disalin ke serial data buffer
maka data sesungguhnya diterima ke dan dari serial port.
2.9.4 Mode Pengalamatan
Mode pengalamatan ini secara garis besar terdiri dari pengalamatan tak langsung,
pengalamatan langsung, pengalamatan bit, dan pengalamatan kode.
a. Pengalamatan Tak Langsung (Indirect Addressing Mode)
Pada pengalamatan tak langsung, instruksi menunjuk pada sebuah register yang
berisi alamat memori yang akan dituju. Pengalamatan tak langsung biasanya menggunakan
simbol @ yang maksudnya menunjuk alamat memori yang terdapat pada register tersebut.
b. Pengalamatan Langsung (Direct Addressing Mode)
Pengalamatan langsung pada sebuah operasi dilakukan dengan memberikan data
secara langsung ke sebuah alamat register.
c. Pengalamatan Segera (Immediate Addressing Mode)
Pengalamatan segera pada sebuah operasi dilakukan dengan memberikan data
secara langsung tanpa perantara dari alamat tertentu. Biasanya pengalamatan segera ini
diawali dengan tanda #.
e. Pengalamatan Bit
Pengalamatan bit pada sebuah operasi digunakan untuk mengalamati suatu alamat
secara bit.
f. Pengalamatan Kode
Pengalamatan kode ini proses pengalamatannya ditunjukkan langsung pada kode
2.10 Menghitung
Error Gerakan Jangkauan Robot
Robot pengendali bor otomatis dituntut untuk mampu mengebor sasaran dengan
variasi terhadap sumbu X, variasi terhadap sumbu Y, dan variasi sudut pengeboran.
Berdasarkan hal tersebut maka diperlukan 3 macam cara mencari nilai error yang muncul
yaitu pencarian nilai error gerakan terhadap sumbu X, pencarian nilai error gerakan
terhadap sumbu Y dan pencarian nilai error gerakan sudut mengeboran.
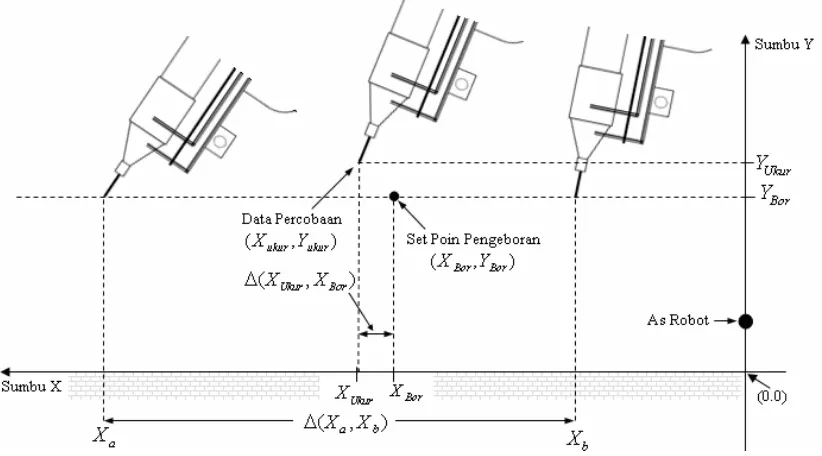
2.10.1 Mencari nilai Error gerakan terhadap sumbu X
Cara mencari nilai error terhadap sumbu X dapat dilihat seperti pada gambar 2.19.
Gambar 2.19 Mencari Nilai Error Gerakan Terhadap Sumbu X
Berikut adalah perhitungan persentase error dari gambar 2.19 :
) ,
(XUkur Yukur = Titik koordinat pengeboran yang dijangkau robot diperoleh
dari data percobaan
) ,
(XBor YBor = Titik koordinat pengeboran yang seharusnya dijangkau robot
(set point yang seharusnya dijangkau)
) , (XUkur XBor
∆ = Selisih antara XUkur dengan XBor
)
(Xa = Jangkauan lengan terjauh pada sumbu YBor
)
(Xb = Jangkauan lengan terdekat pada sumbu YBor
) , (Xa Xb
Dari keterangan diatas diperoleh perhitungan persentase error sumbu X :
% 100 * ) , (
) , (
% ⎟⎟
⎠ ⎞ ⎜⎜
⎝ ⎛
∆ ∆ =
b a
Ukur Bor
X X
X X
ErrorX ...(2.25)
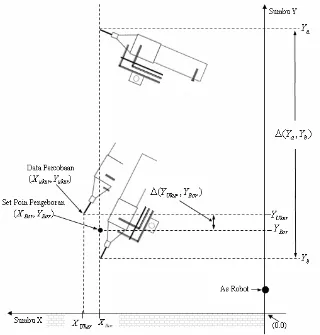
2.10.2 Mencari nilai Error gerakan terhadap sumbu Y
Cara mencari nilai error terhadap sumbu Y dapat dilihat seperti pada gambar 2.20.
Gambar 2.20 Mencari nilai Error terhadap sumbu Y
Berikut adalah perhitungan persentase error dari gambar 2.20 :
) ,
(XUkur Yukur = Titik koordinat pengeboran yang dijangkau robot diperoleh
dari data percobaan
) ,
(XBor YBor = Titik koordinat pengeboran yang seharusnya dijangkau robot
(set point yang seharusnya dijangkau)
) , (YUkur YBor
)
(Ya = Jangkauan lengan tertinggi pada sumbu XBor
)
(Yb = Jangkauan lengan terendah pada sumbu XBor
) , (Ya Yb
∆ = Selisih antara Ya dengan Yb
Dari keterangan diatas diperoleh perhitungan persentase error sumbu Y :
% 100 * ) , ( ) , ( % ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∆ ∆ = b a Ukur Bor Y Y Y Y ErrorY ...(2.26)
2.10.3 Mencari nilai Error sudut pengeboran
Cara mencari nilai error sudut pengeboran dapat dilihat seperti pada gambar 2.21.
Gambar 2.21 Mencari nilai Error Sudut Pengeboran
Berikut adalah perhitungan persentase error dari gambar 2.21 :
Ukur
θ = Sudut pengeboran yang dijangkau robot diperoleh dari data percobaan
Bor
θ = Sudut pengeboran yang seharusnya dijangkau robot (set point yang
seharusnya dijangkau)
) , (θUkur θBor
∆ = Selisih antara YUkur dengan YBor
)
(θa = Sudut lengan terkecil yang mampu dibentuk bor
) (θb
= Sudut lengan terbesar yang mampu dibentuk bor
) , (θa θb
∆ = Selisih antara Ya dengan Yb
Dari keterangan diatas diperoleh perhitungan persentase errorθ:
BAB III
PERANCANGAN PERANGKAT KERAS
DAN PERANGKAT LUNAK
Pada bagian ini akan dijelaskan secara menyeluruh semua tahap perancangan robot.
Perancangan ini meliputi perancangan perangkat keras dan perancangan perangkat lunak.
Blok diagram robot pengendali bor otomatis yang akan didisain dapat dilihat pada gambar
3.1.
Operator dapat memilih gerakan-gerakan yang sudah tersimpan di dalam memori
mikrokontroler dengan cara menekan tombol-tombol yang ada pada kontrol panel. Hasil
penekanan tombol tersebut selanjutnya menjadi input mikrokontroler dan sesuai memori
gerakan yang sudah tersimpan, mikrokontroler akan memerintah setiap aktuator untuk
bergerak sesuai dengan input gerakan yang telah dipilih. Setiap aktuator dilengkapi dengan
sensor yang berfungsi sebagai input data pembanding dalam proses logika di dalam
mikrokontroler sehingga gerakan setiap aktuator dapat terkontrol dan dapat bergerak sesuai
dengan program yang sudah tersimpan.
Gambar 3.1 Diagram Kotak Robot Pengendali Bor Otomatis
Pada input kontrol panel terdapat beberapa tombol dengan fungsinya
masing-masing. Tombol- tombol ini digunakan sebagai sarana operator untuk memberikuan input
Tabel 3.1 Tombol Panel Kontrol pada Mikrokontroler
No Tombol Fungsi Tombol
1 Pause Untuk menghentikan gerakan robot secara mendadak.
2 Posisi Kalibrasi Untuk kalibrasi jangkauan lengan robot
3 Posisi Start Perintah supaya robot bergerak ke posisi siap.
4 Gerak Pertama Perintah menjalankan sasaran pengeboran pertama.
5 Gerak Kedua Perintah menjalankan sasaran pengeboran kedua.
6 Gerak Ketiga Perintah menjalankan sasaran pengebora ketiga.
7 Semua Gerak Perintah menjalankan semua sasaran pengeboran sekaligus.
3.1 Perancangan
Mekanik
Robot
Disain kerangka robot sangat menentukan kemaksimalan kinerja robot dalam
menjangkau sasaran titik pengeboran. Kerangka yang akan didisain khusus untuk variasi
titik pengeboran pada satu dimensi gerak saja.
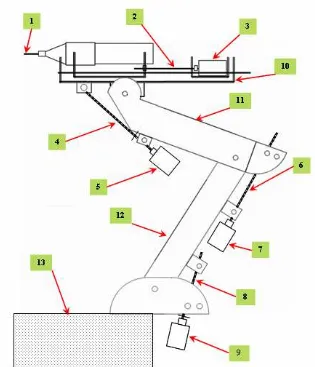
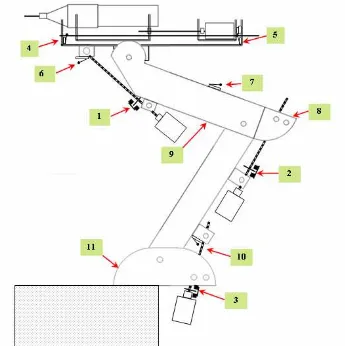
3.1.1 Kerangka Robot
Robot yang didisain dapat dilihat seperti pada gambar 3.2. Robot ini terdiri dari 3
lengan yaitu lengan A, lengan B dan lengan C. Setiap lengan terdapat ulir yang dilengkapi
dengan motor DC sebagai pemutar. Saat ulir ini berputar, ulir ini akan mendorong atau
menarik lengan robot sesuai arah putaran motor.
Keterangan gambar 3.2 adalah sebagai berikut :
1) Mata bor.
2) Baut ulir pendorong bor.
3) “Motor A” pendorong bor.
4) “Ulir B” penggerak lengan A.
5) “Motor B” penggerak ulir lengan A.
6) “Ulir C” penggerak lengan B.
7) “Motor C” penggerak ulir lengan B.
8) “Ulir D” penggerak lengan C.
9) “Motor D” penggerak ulir lengan C.
10) Lengan A.
12) Lengan C.
13) Lantai robot.
Gambar 3.2 Kerangka Robot Pengendali Bor Otomatis
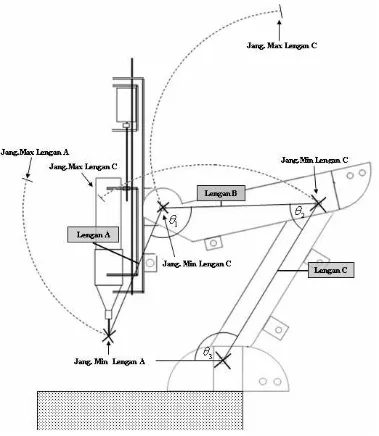
3.1.2 Gerak Putar Maksimum Lengan Robot
Lengan robot pengendali bor otomatis mampu berputar pada jangkauan tertentu.
Kemampuan maksimum gerak putar robot dapat ditunjukkan seperti pada gambar 3.3.
Karena ulir yang digunakan adalah ulir dengan diameter dan tingkat kemiringan standar
maka dalam perancangan mekanik robot juga disesuaikan dengan bentuk ulir yang ada.
Beberapa ukuran komponen mekanik robot ditunjukkan seperti pada tabel 3.2.
perubahan sudut robot tidak linear. Karena data yang tidak linear tersebut perlu diambil
data percobaan dari rangkaian mekanik robot yang sudah jadi. Sudut putar minimum antar
lengan (θ1,θ2,θ3), hubungan antara kemampuan sudut jangkauan putar lengan dengan
jumlah cacahan ulir yang dilakukan robot selanjutnya secara lengkap akan dibahas pada
BAB IV berdasarkan data hasil percobaan yang diperoleh dari rangkaian mekanik robot
yang sudah jadi.
Model robot ini dibuat dari bahan akrilik dengan tebal bahan 3 mm. Alasan
mengapa dipilih bahan ini sebagai kerangka karena untuk pembuatannya relatif mudah.
Tabel 3.2 Ukuran Mekanik Kerangka Robot
No. Parameter Panjang
1. Lengan A 15 cm
2. Lengan B 17 cm
3. Lengan C 21 cm
4. Tinggi as lengan C dari lantai 3.5 cm
3.1.3 Posisi Sensor
Ada dua jenis sensor yang digunakan dalam robot, yaitu sensor pencacah (counter)
dan sensor limit switch. Posisi sensor pada robot dapat dilihat seperti pada gambar 3.4.
Keterangan gambar 3.4 adalah sebagai berikut:
1) Pencacah ulir B berfungsi untuk mengetahui posisi antara lengan A dengan lengan B.
2) Pencacah ulir C berfungsi untuk mengetahui posisi antara lengan B dengan lengan C.
3) Pencacah ulir D berfungsi untuk mengetahui posisi antara lengan C dengan lantai.
4) Switch off depan motor A
5) Switch off belakang motor A
6) Switch off jangkauan minimum motor B
7) Switch off jangkauan maksimum motor B
8) Switch off jangkauan maksimum motor C
9) Switch off jangkauan minimum motor C
10) Switch off jangkauan minimum motor D
11) Switch off jangkauan maksimum motor D
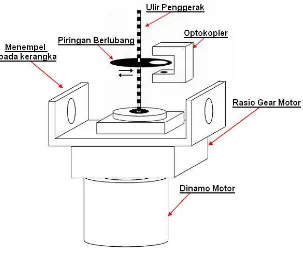
Gambar 3.5 Perancangan Mekanik Posisi Sensor Pencacah
Sensor pencacah berfungsi untuk mendeteksi putaran ulir motor pada setiap
penggerak sehingga posisi antar lengan robot dapat diketahui. Perancangan mekanik sensor
pencacah dapat dilihat seperti pada gambar 3.5. Perancangan rangkaian elektronis sensor
optokopler dapat dilihat pada subbab 3.2.5 tentang antarmuka optokopler dengan
3.2
Rangkaian Mikrokontroler AT89S51
Untuk menghubungkan mikrokontroler dengan komponen lain diperlukan beberapa
rangkaian antarmuka. Salah satu tujuan rangkaian antarmuka ini adalah untuk menghindari
adanya kerusakan pada mikrokontroler akibat dari adanya beban berlebih jika dihubungkan
ke peralatan berdaya besar. Keseluruhan perancangan rangkaian elektronik yang akan
digunakan, secara detail akan diulas pada bagian ini.
3.2.1 Pembagian Fungsi Port Mikrokontroler
Port 0, port 1, port 2 dan port 3 merupakan pin I/O dua arah yang dapat
dimanfaatkan sebagai output maupun input. Perancangan fungsi setiap pin mikrokontroler
dapat dilihat pada tabel 3.3.
Tabel 3.3 Pembagian Fungsi Port Mikrokontroler
PORT 0
P0.0 Switch off belakang motor “DC A”. Input
P0.1 Switch off depan motor “DC A”. Input
P0.2 counter “ulir B”. Input
P0.3 counter “ulir C”. Input
P0.4 counter “ulir D”. Input
P0.5 Switch off motor pendorong motor drill Input
PORT 1
Switch off jangkauan minimum lengan A (motor B). Input
Switch off jangkauan minimum lengan B (motor C). Input
P1.0
Switch off jangkauan minimum lengan C (motor D). Input
Switch off jangkauan maksimum lengan A (motor B). Input
Switch off jangkauan maksimum lengan B (motor C). Input
P1.1
Switch off jangkauan maksimum lengan C (motor D). Input
P1.7 Pengaktif motor drill Output
PORT2
P2.0
P2.1 Sebagai pengendali arah motor A.
Tabel 3.3 (Lanjutan)Pembagian Fungsi Port Mikrokontroler
PORT 2
P2.2
P2.3 Sebagai pengendali arah motor B.
Output
P2.4
P2.5 Sebagai pengendali arah motor C. Output
P2.6
P2.7 Sebagai pengendali arah motor D. Output
PORT 3
P3.0 Tombol Pause Input
P3.1 Tombol Default Input
P3.2 Tombol Posisi Start Input
P3.3 Tombol sasaran pertama Input
P3.4 Tombol sasaran kedua Input
P3.5 Tombol sasaran ketiga Input
P3.6 Tombol semua sasaran Input
3.2.2 Rangkaian
Antarmuka
Mikrokontroler dengan Motor
Semua motor pada robot ini akan aktif secara bergantian satu-persatu. Untuk
menghindari pembebanan arus yang terlalu besar pada pin mikrokontroler, diberikan
rangkaian penguat arus sebagai antarmuka antara mikrokontroler dengan motor. Pada
motor drill dilengkapi dengan rangkaian transistor sebagai penguat arus sekaligus
penyaklar elektris. Selain sebagai penguat arus dan penyaklar elektris, prinsip rangkaian
jembatan H juga digunakan untuk mengontrol arah putaran motor A, motor B, motor C dan
motor D. Prinsip kerja rangkaian jembatan H dan prinsip kerja transistor sebagai saklar
secara lengkap telah dibahas di BAB II.
a)
Rangkaian Transistor Sebagai Saklar
Untuk motor drill (motor bor pelubang) tidak memerlukan pengontrol arah putaran
motor namun rangkaian transistor hanya bekerja on-off saja. Untuk rangkaian penguat arus
rangkaian transistor sebagai saklar diberi sebuah rangkaian buffer. Rangkaian buffer ini
berfungsi untuk menjaga supaya tidak terjadi drop tegangan pada tegangan keluaran port
mikrokontroler saat berbeban.
Gambar 3.6 Penguat Arus ON-OFF
Dari rangkaian gambar 3.6 diketahui saat kondisi P1.7 high Tegangan keluaran
buffer LM324 Vcc-1,5Vdc=3,5Volt dan nilai Vf setiap transistor adalah 0,7 Volt
(transistor jenis silikon) [1]. Dalam perancangan, transistor Q1 yang digunakan adalah
transistor 2N2222 dengan nilai β2N2222(Saturasi) ≈10 dan transistor Q2 adalah transistor TIP
31 dengan nilai βTIP31(Saturasi) ≈10 (diperoleh dari data sheet transistor).
Untuk menentukan arus IR, perlu dipertimbangkan bahwa arus IR yang diambil
dari rangkaian buffer harus kurang dari 40 mA (Data sheet Source current LM 324). Jika
nilai R diberi 1,2kΩ, maka nilai arus IR dan daya PR+Vf1+Vf2 adalah:
mA k
Volt Volt
Volt R
V V
V
IR Buffer f N f TIP 1,75
2 , 1
7 , 0 7
, 0 5
, 3
) 31 ( 2222 2
( =
Ω − −
= −
− =
mW mA
V I
V
PR+Vf1+Vf2 = Buffer* R =3,5 *1,75 =6,12
Dengan beban arus IR sebesar 1,75 mA masih berada jauh di bawah batas kemampuan
Jika diketahui βQ1sat =10 dan βQ2sat =10, Power In = 12V, maka nilai penguatan
darlington Q1 dan Q2, nilai arus IC dan nilai daya motor (PMotor) dapat diperoleh sebagai
berikut:
100 10 * 10
* 2
1 = =
= Qsat Q sat
Darlington β β
β
175mA mA
1,75 * 00 1
* = =
= D R
C I
I β
W mA V
I V
PMotorBor = Power* C =12 *175 =2,1
Arus IC sebesar 175mA diperkirakan sudah mampu untuk menggerakkan motor drill. Jika
disipasi daya LM324 dan disipasi daya transistor diabaikan, maka total daya rangkaian
penguat arus On-Off adalah sebagai berikut :
W W
mW P
P
PPenguaArusSaklar = R+Vf1+Vf2+ MotorBor =6,12 +2,1 =2,106
D adalah dioda freewilling dengan seri N4001.
b)
Rangkaian Jembatan H
Rangkaian jembatan H yang digunakan secara menyeluruh dapat dilihat pada
gambar 2.11. Supaya besar nilai arus pada motor untuk setiap arah putaran sama, maka
nilai beberapa komponen diset sama. Komponen yang diset sama yaitu : R1 = R5, R2 =
R6, R3 = R7, R4 = R8, Q1 = Q2 dan Q3 = Q4.
Dari rangkaian gambar 2.10, saat kondisi In_A dihubungkan ke sebuah sumber
tegangan, In_B dan GND dihubungkan ke ground, maka dapat diperoleh penyederhanaan
rangkaian seperti pada gambar 2.12 sehingga lebih mudah dalam merancang nilai
komponen yang akan digunakan.
Berikut adalah perancangan komponen sekaligus perhitungan teoritis dari gambar
2.12. Sebagai perancangan awal ditentukan transistor yang digunakan, yaitu:
1) Transistor Q1 dan Q2 adalah transistor NPN 2N2222 karena kebutuhan arus
kolektor yang digunakan cukup kecil (dalam orde miliAmpere).
2) Transistor Q
![Gambar 2.3 Rangkaian Ekivalen DC dari Gambar 2.2 [1]](https://thumb-ap.123doks.com/thumbv2/123dok/1682438.2076772/23.612.240.388.440.612/gambar-rangkaian-ekivalen-dc-dari-gambar.webp)
![Gambar 2.4 Loop Basis-Emiter [1]](https://thumb-ap.123doks.com/thumbv2/123dok/1682438.2076772/24.612.226.398.434.618/gambar-loop-basis-emiter.webp)