doi https://doi.org/10.21776/ub.jkptb.2021.009.02.03
Sistem Otomasi Ekstraksi Radiocessium pada Pengambilan dan
Preparasi sampel untuk Menentukan Kualitas Air
Sabar
1, Mohamad Nur Yahya
2*, Zunanik Mufidah
3, Sastra Kusuma Wijaya
4Duwi Hariyanto
5,
Kisna Pertiwi
61,5,6 Rekayasa Instrumentasi dan Otomasi, Jurusan Teknologi Produksi dan Industri, Institut Teknologi Sumatera 2* Radioekologi, Badan Tenaga Nuklir Nasional (BATAN), Jakarta, Indonesia
3 Teknik Biosistem, Jurusan Teknologi Produksi dan Industri, Institut Teknologi Sumatera 4 Program Studi Ilmu Fisika, Fakultas Ilmu Pengetahuan Alam, Universitas Indonesia
*Email: [email protected] RIWAYAT ARTIKEL Disubmit 13 Juli 2021 Diterima 14 Juli 2021 Diterbitkan 3 Agustus 2021 ABSTRAK
Telah dilakukan pembuatan sistem otomasi untuk ekstraksi radiocessium pada filter preparasi dan filter pengambilan sampel dalam menentukan kualitas air. Sistem otomasi dilakukan dengan cara mengintegrasikan antara pompa,
flowmeter dan sensor pendeteksi cairan mengunakan perangkat keras Arduino
Uno. Struktur pemrograman yang ditanamkan pada perangkat Arduino menggunakan bahasa pemrograman C dan dikomunikasikan secara serial dengan komputer menggunakan bahasa pemrograman LabVIEW. Validasi sistem otomasi pada mode sampling dilakukan dengan membandingkan antara volume set poin dengan volume yang dihasilkan serta membandingkan tingkat kejernihan cairan. Untuk mengetahui tingkat keberhasilan preparasi pada filter ekstraksi dilakukan pengambilan data pada cairan yang digunakan sebagai media ekstraksi. Data hasil rekaman flowmeter diperoleh persamaan y = 2601.3𝑥-31.183 dengan linearitas sebesar 0.9788. Karakteristik ADC pada cairan ekstraksi berkisar antara 30 – 60. nilai tersebut digunakan sebagai referensi pada mode preparasi media ekstraksi filter radiocesium. Hasil validasi sistem otomasi tersebut menampilkan kesesuaian antara parameter yang di input dengan yang dihasilkan serta kestabilan pada pembacaan parameter.
KATA KUNCI
Air; arduino; flowmeter; LabVIEW; otomasi
doi https://doi.org/10.21776/ub.jkptb.009.02.03
1. Pendahuluan
Indonesia merupakan negara maritim yang Sebagian besar dikelilingi lautan. Secara geografis, Indonesia terletak di antara dua benua dan dua samudera, dan memiliki kekayaan sumber daya alam yang melimpah [1]. Namun dibalik kekayaan sumber daya alam tersebut, Indonesia juga merupakan negara yang rawan akan bencana alam salah satunya adalah gempa bumi. Gempa bumi dengan kekuatan 9.0 skala richter yang terjadi pada tanggal 11 Maret 2011 di Pasifik Barat menyebabkan kecelakaan reaktor nuklir Fukushima Dai-ichi Nuclear
Power Plant (FDNPP) [2]. Cesium merupakan elemen yang secara alami yang ditemukan dalam jumlah kecil
didalam batu, tanah dan debu. Sedangkan Cesium 137 atau disebut juga radiocesium merupakan bentuk isotop radioaktif yang terbentuk sebagai hasil produk pada reaksi nuklir. Selanjutnya radioaktif isotop lainnya adalah Cesium 134 yang dihasilkan dari fisi nuklir atau pembelahan inti nuklir untuk menghasilkan sejumlah energi. Sejumlah zat radioaktif (antara lain137Cs dan 134Cs) dilepaskan disekitar perairan laut laut Fukushima akibat
doi https://doi.org/10.21776/ub.jkptb.2021.009.02.03 bencana. Total dari 137 Cs yang dilepas langsung ke perairan laut diperkirakann sebesar 27 ± 15 PBq [3].
Penelitian terdahulu pemperkirakan jumlah Iodium-131 yang merupakan radioisotop sebanyak 160 PBq 131I dan
15 PBq 137Cs terlepas ke lautan Pasific [3]. Fakta tersebut di dukung oleh Steinhauser yang memperkirakan lebih
dari 80% 137Cs yang terlepas ke atmosfir terdeposisi di Lautan Pasifik [4]. Pada umumnya Radionuklida 137Cs
bersifat larut dalam air akan terbawa oleh arus laut, sehingga Radionuklida 137Cs tersebut dibawa menyebar
kepenjuru samudera. Oleh sebab itu untuk menghadapi kecelakaan reaktor nuklir sebagai akibat bencana alam telah dikembangkan sistem keselamatan pasif pada reaktor nuklir maju [5]–[8].
Sebagai negara maritim, Indonesia yang diapit oleh dua lautan besar yakni Samudera Pasifik di bagian Utara dan Timur laut serta Samudera Hindia di bagian Selatan dan Barat daya Indonesia merupakan saluran bagi aliran massa air dari Samudera Pasifik ke Samudera Hindia [9]. Untuk mengantisipasi dampak masuknya kontaminasi diperairan laut Indonesia, telah dilakukan pemantauan 137Cs di berbagai wilayah pesisir Indonesia oleh peneliti
BATAN [10]. Hasil penelitian tersebut menginformasikan perairan pesisir laut Indonesia belum terkontaminasi Radionuklida 137Cs yang berasal dari Fukushima yang dibuktikan dari rasio 137Cs/134Cs jauh lebih besar dari nilai
1. Namun dengan demikian, analisis kandungan 137Cs yang sudah dilakukan memiliki keterbatasan jumlah
volume air laut yang dapat dipreparasi dan diteliti secara lanjut.
Dalam skala besar, proses pemindahan air tidak mungkin dilakukan secara manual oleh manusia, perlu adanya sistem kontrol dan otomasi untuk proses tersebut. Disisi lain dengan metode filter ekstraksi Cesium yang ada masih menggunakan sistem konvensional yaitu artinya proses pengambilan sampel air laut hanya menggunakan pompa standar tanpa adanya sistem otomatis pada penelitiannya sebelumnya [9]. Peran serta teknologi dalam dunia penelitian tidak hanya sebagai alat bantu manusia untuk melakukan proses pengambilan sampel, melainkan juga dapat menghasilkan data yang valid dan teruji. Pada penelitian ini akan dibuat suatu sistem instrumentasi dan otomasi yang akan menjadi solusi untuk mengintegrasikan sensor-sensor dan pengolah data untuk meningkatkan validitas data sampel air yang diambil.
Kebaruan pada penelitian sistem otomasi ini merupakan pengembangan lanjutan dari penelitian sebelumnya yang telah meneliti alat instrumentasi berupa desain ektraksi radiocesium untuk pemeriksaan kualitas air laut [9]. Namun masih ada kekurangan pada sisi pengambilan sampel dan preparasi yang belum terotomasi secara efisien dan efektif. Adapun kelemahan desain sebelumnya oleh M. Yahya berupa sistem otomasi untuk ekstraksi radiocesium pada filter preparasi dan filter sampel yang terintergrasi secara automatis. Sistem otomasi yang dilakukan adalah dengan cara mengintegrasikan sensor dan pompa dengan instrumentasi maya. Selanjutnya pada sistem otomasi yang akan dibangun ini menggunakan Arduino Uno sebagai perangkat utama kendali sistem. Pada penelitian sebelumnya banya menggunakan perangkat Arduino Uno sebagai pengendali sistem pada instrumentasi maya [11][12]. Serta LabVIEW sebagai perangkat lunak pengontrol dan pengolah data dari sampel.
Selanjutnya penelitian sebelumnya yang mendukung penggunaan LabVIEW sebagai sistem monitoring banjir telah dilakukan [11]. Penelitian pengembangan berikutnya sistem otomasi ini bisa menghimpun data dan mengklasifikasikanya, tidak hanya untuk radioaktif pada radiocesium, melainkan pada radioaktif lainnya yang terdapat pada air. Riset kedepan mengenai sistem otomasi ini bisa ditambahkan Artificial Intelligence (AI) sebagai sistem prediksi [13][14]. Karena dengan penerapan AI pada sistem instrumentasi tersebut kita mampu mengolah data dalam jumlah ukuran besar dan melakukan prediksi serta kalsifikasi zat radioaktif dengan mudah dan cepat tanpa harus uji laboratorium yang memerlukan waktu lama. Pada penelitian sebelumnya yang dilakukan oleh Sabar menggunakan AI sebagai sistem prediksi suatu produk makanan kandungan air dan garam dalam produk makanan bersifat non destruktif telah berhasil dibangun dengan koefisien korelasi 0.99 dengan
doi https://doi.org/10.21776/ub.jkptb.2021.009.02.03 jumlah komponen PLS adalah 25 pada kandungan garam [15]. Sedangkan pada kandungan air sistem memiliki koefisien korelasi 0.99 dengan komponen PLS adalah 30 untuk kandungan air [14].
2. Metode Penelitian
Gambar Dalam perancangan sistem instrumen ini terdiri 2 rancangan secara gais besar yaitu perangkat keras (hardware), perangkat lunak (software) yang berisi algoritma untuk menjalankan proses akuisisi data. Selanjutnya sistem memperoleh informasi dari sensor flowmeter dan turbidity yang kemudian sebagai masukan untuk menjalankan pompa. Setelah dilakukan proses instalasi, sistem pompa dikalibrasi dengan menggunakan gelas ukur untuk mendapat nilai linearitas antara Analog to Digital Converter (ADC) flowmeter dengan volume yang di keluarkan. Dengan terpantaunya kondisi pada saat pengambilan sampel dan preparasi maka hasil data yang diperoleh dapat tertelusur dan validitasnya.
2.1. Rancangan Perangkat Keras (Hardware)
Perancangan sistem pada penelitian ini terdiri dari pembuatan hardware terdiri terdiri atas dua bagian, yaitu meliputi perancangan elektronik dan juga perancangan pipa saluran air. Perancangan elektronik meliputi skematik pengatur kecepatan pompa, pengaturan sensor flowrate dan pendeteksi media ekstraksi. Sedangkan perancangan-perancangan aliran air meliputi peletakan sensor-sensor dan penempatan aliran media ekstraksi. Pembuatan perangkat keras diawali dengan membuat desain susunan peralatan yang akan digunakan. Perangkat keras yang digunakan dalam sistem ini adalah pompa, rangkaian relay, rangkaian sensor optik, jalur aliran media air mulai dari input yang di hisap melalui pompa dan dikeluarkan melalui filter. Hal tersebut terdapat pada Gambar 1.
Gambar 1. Desain sistem otomasi ekstraksi radiocesium 2.2.1 Mikrokontroller
Mikrokontroller (Gambar 2) merupakan komputer kecil dalam satu chip yang mengandung sebuah unit processor, memori dan bagian programabel (input/output). Pada penelitian ini menggunakan mikrokontroller Arduino Uno yang menggunakan IC Atmega328. Board ini memiliki 14 digital input / output (dimana 6 pin dapat digunakan sebagai output PWM, 6 input analog, 16 MHz osilator kristal, koneksi USB dan dilengkapi tombol reset. Pin-pin ini berisi semua yang diperlukan untuk mendukung mikrokontroller hanya dengan menghubungkannya dengan komputer atau sumber tegangan untuk menggunakannya. Dengan demikian, umumnya mikrokontroller dapat digunakan dalam pengolahan sinyal [16]–[18]
doi https://doi.org/10.21776/ub.jkptb.2021.009.02.03 Gambar 2. Mikrokontroller Arduino UNO
2.2.2 Photodioda
Photodioda adalah suatu jenis dioda yang resistansinya berubah-ubah jika terkena cahaya. Kemampuan photo dioda mempunyai respon 100 kali lebih cepat daripada phototransistor, dengan kemampuan mendeteksi intensitas cahaya dibawah 1pW/cm2 sampai intensitas di atas 10mW/cm2.
Sepasang sensor intensitas cahaya yang terdiri dari LED sebagai sumber cahaya dan photodioda berfungsi sebagai detektor cahaya. Pembacaan sensor cahaya memanfaatkan perubahan nilai resistansi pada
photodioda. Dari perubahan nilai resistansi tersebut maka akan mempengaruhi tegangan yang keluar dari photodioda. Photodioda sebagai sensor yang akan memutuskan apakah media preparasi sudah terserap
semua pada filter ekstraksi. Dengan melakukan pembacaan nilai adc antara sebelum dilewatkan melalui media filter ekstraksi dengan sesudah dilewatkan filter ekstraksi. Adapun deskripsi sensor photodioda yang digunakan sebagai berikut merupakan buatan perusahaan Vishay semikonduktor yang dibangun oleh Dr. Felix Zandman kelahiran Polandia. Selanjutnya sensitivitas panjang gelombang (λP): 940nm, tegangan sirkuit terbuka: 0.39 V, arus balik lampu: 40μA, arus gelap terbalik: 5nA, waktu naik/waktu turun pulse: 45/45 nS, sudut Pandang: 80 derajat sedangkan ukuran dimensi adalah 5 mm [19]. Gambar Photodioda terdapat pada Gambar 3.
Gambar 3. Sensor photodioda 2.2.3 Flowmeter
Flowmeter merupakan alat yang dapat mengukur volume fluida dengan mengkonversi laju aliran fluida
ke satuan volume. Flowmeter tersebut memiliki sebuah mekanik baling-baling yang akan berputar jika ada aliran. Pada baling-baling tersebut terdapat magnet yang ikut berputar. Gerakan magnet tersebut di deteksi oleh sensor ‘Hall Effect’ yang berada di bagian bawah (Gambar 4). Sensor tersebut terhubung dengan 3 buah kabel yang berfungsi diantaranya sebagai VCC, GND dan output pulse.
Sensor dengan nama merek dagang adalah YF-S201 memiliki kemampuan mengukur laju aliran dengan
doi https://doi.org/10.21776/ub.jkptb.2021.009.02.03 sensor memiliki tegangan kerja 4.5 V sampai dengan 18 V arus DC, maksimum arus yang mengalir adalah 15 mA pada Tegangan 5V, akurasi ± 10%, pulsa perliter adalah 450, untuk body valve terbuat dari polymide, baut terbuat dari plat zinc, cover sensor terbuat dari polymide (nylon) [20].
Gambar 4. Flowmeter Hall effect 2.2.4 Pompa Arus AC
Pompa air adalah suatu rangkaian elektronika yang dikemas menjadi suatu instrumen, yang mempunyai fungsi sebagai penyedia aliran air dalam debit besar dengan prinsip kerja menghisap air yang tersedia dan mendistribusikan aliran tersebut kepada setiap saluran keluaran air. Motor pada pompa air adalah motor induksi 1 phasa. Oleh karenanya rangkaian pompa air akan membutuhkan daya 2 kali lebih besar saat pertama kali dioperasikan, untuk starting motor itu sendiri. Setelah motor sudah aktif maka motor akan memutar baling-baling pompa hingga mencapai putaran yang akan menghasilkan daya hisap sumber air. Persamaan kecepatan motor pada pompa air tertulis pada Persamaan 1.
S=𝑛𝑠−𝑠𝑛𝑠 (1)
Dimana :
S : slip
Ns : kecepatan sinkron (rpm)
s : kecepatan rotor (rpm) 2.2.5 Variable Speed Drive
Parameter yang dibutuhkan dari pompa yang menggunakan motor adalah pengatur kecepatan dan torsi motor. Untuk itu dibutuhkan pengaturan yang fleksibel dengan cara mengatur frekuensi tegangan input yang berasal dari tegangan jala – jala PLN. Frekuensi tegangan jala-jala PLN yaitu 50 Hz, dengan menggunakan VSD, frekuensi tersebut dirubah menjadi frekuensi yang diinginkan agar pompa dapat menghisap dan mengalirkan fluida pada kecepatan yang diinginkan. Pengaturan kecepatan motor induksi dapat dilakukan dengan mengatur tegangan jala-jala. Semakin besar nilai tegangan pada pompa maka kecepatan motor akan semakin besar. Tegangan pada motor berpengaruh karena perubahan frekuensi mengakibatkan perubahan tegangan yang mengikuti Persamaan 2.
𝐸 = 4.44 𝑥 𝑓 𝑥 𝑛 𝑥 ∅ (2)
Dimana :
E : tegangan induksi (V)
f : frekuensi rotor saat berputar (Hz)
doi https://doi.org/10.21776/ub.jkptb.2021.009.02.03 2.2.6 LabVIEW
LabVIEW adalah bahasa programming berbasis grafik yang diproduksi oleh National Instruments dengan konsep berbeda. Seperti bahasa pemrograman lainnya yaitu C++, matlab atau visual basic, LabVIEW juga mempunyai fungsi dan peranan yang sama, perbedaanya bahwa labVIEW menggunakan bahasa pemrograman berbasis grafis atau blok diagram sementara pemrograman lainnya menggunakan basis text. Program LabVIEW dikenal dengan sebutan Vi atau Virtual Instruments karena penampilan dan operasinya dapat meniru sebuah instrumen. Software LabVIEW terdiri dari empat komponen utama, yaitu:
1) Front Panel: Bagian window yang berlatar abu-abu serta mengandung control dan indikator. Front panel
digunakan untuk membangun sebuah VI, menjalankan program dan mendebug program.
2) Blok diagram dari Vi: Bagian window yang berlatar belakang putih berisi source code yang dibuat dan
berfungsi sebagai instruksi untuk front panel.
3) Control Pallete: Tempat beberapa control dan indikator pada front panel.
4) Functions Palette : Digunakan untuk membangun sebuah blok diagram, functions pallete hanya tersedia
pada blok diagram.
Untuk mendapatkan software tersebut bisa kita dapatkan di website www.ni.com dengan register sebagai versi student kemudian mendapatkan lisensi dari software tersebut.
2.2. Perancangan Perangkat Lunak (Software)
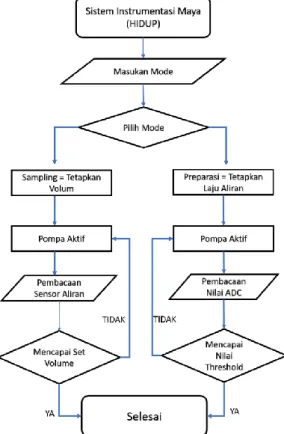
Perancangan software terbagi menjadi dua bagian yaitu pemrograman menggunakan bahasa C yang ditanamkan pada Mikrokontroller Arduino Uno dan pemrograman LabVIEW yang di operasikan pada komputer. Untuk memudahkan dalam pembuatan alur program peneliti membuat flowchart sebagai perencanaan awal.
Flowchart yang dibuat sesuai dari pembuataan keseluruhan program dapat dilihat pada Gambar 5 dan Gambar 6.
doi https://doi.org/10.21776/ub.jkptb.2021.009.02.03
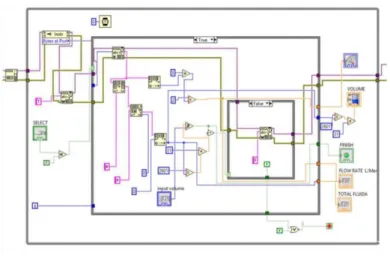
Gambar 6. Blok diagram sistem otomasi pada LabVIEW 3. Hasil dan Pembahasan
Hasil dari rancangan dan pembuatan sistem otomasi yang terintegrasi ini merupakan gabungan dari rangkaian sensor flowmeter, sensor optik, variable speed drive serta kombinasi antara platform Arduino dan LabVIEW. Sistem ini memiliki dua pilihan mode kerja yang berbeda yaitu mode sampling dan mode preparasi. Dalam mode sampling sistem hanya melihat parameter volume dan aliran fluida yang sudah melewati sensor
flowmeter serta dapat di masukkan batas volume yang diinginkan. Dalam mode preparasi sistem melihat
parameter adc konsentrat yang ada kemudian ditentukan nilai batas adc konsentratnya. 3.1 Sistem Sebagai Mode Sampling
Sistem otomasi sebagai mode sampling merupakan pilihan yang digunakan untuk kebutuhan pengambilan sampel air. Air yang akan dicuplik atau sampling bisa ditentukan besaran volumenya dengan cara memasukan nilai volume yang diinginkan pada tampilan Gambar 7 untuk front panel LabVIEW. Isi pemrograman LabVIEW yang digunakan dalam mode sampling yakni memerintahkan Arduino untuk mengeksekusi program yang menjalankan pompa melalui komunikasi serial.
Gambar 7. Front Panel Sistem
Pada mode sampling alur pemrograman (Gambar 8) diawali dengan membaca pilihan mode kemudian melakukan perintah write kepada arduino untuk menjalankan pompa melalui rangkaian relay. Setelah pompa berjalan maka semua sensor mulai melakukan pembacaan. Pada mode ini pengguna bisa membatasi jumlah volume yang diinginkan dengan memasukan nilai pada tampilan front panel (Gambar 7).
doi https://doi.org/10.21776/ub.jkptb.2021.009.02.03
Gambar 8. Pemrograman LabVIEW
Selanjutnya pengujian sistem otomasi dengan mode sampling di uji coba dengan cara mengambil sampling air melalui front panel sistem dengan berbeda variasi. Adapun diambil sampling pertama dengan volume 1, 2, 3, 4 dan 5L. Tabel 1 menjelaskan hasil uji keluaran volume dari sistem otomasi dengan mode sampling air.
Tabel 1. Hasil Uji Keluaran Volume dari sistem otomasi mode sampling Air
No Volume (Input) Volume (Output) Error (%)
1 1L 1.2L 20
2 2L 1.8L 10
3 3L 2.5L 16.67
4 4L 3.7L 7.5
5 5L 4.8L 4
Dari hasil pengambilan data volume yang dihasilkan dari nilai batas inputan menghasilkan error pembacaan berkisar antara 4% sampai 20%. Namun demikian error tersebut memiliki kecendrungan menurun jika nilai inputan semakin besar yang terlihat pada Gambar 9.
Gambar 9. Persentase error terhadap volume inputan
Berdasarkan Gambar 9, banyak faktor yang menyebabkan terjadinya error atau bias pada sistem pengukuran. Kesalahan atau error sendiri terbagi menjadi tiga jenis, yaitu spurious error, systematic error dan
random error. Spurious error merupakan gross error atau kesalahan umum. Penyebab spurious error adalah
karena kesalahan manusia (kesalahan menggunakan metode, baca, lihat, serta kesalahan dalam mencatat) atau
0 5 10 15 20 25 1 L 2 L 3 L 4 L 5 L Per sen tase E rr o r
doi https://doi.org/10.21776/ub.jkptb.2021.009.02.03 karena kesalahan alat ukur (instrumen yang tidak berfungsi dengan baik). Systematic error atau kesalahan sistematis yang terdiri dari dua jenis yaitu Instrumental dan Lingkungan. Random error atau kesalahan-kesalahan acak disebabkan oleh penyebab-penyebab yang tidak diketahui dan terjadi walaupun semua kesalahan-kesalahan sistematis telah diperhitungkan. Selain itu, random error menyebabkan pengukuran berulang yang dilakukan terhadap suatu besaran tidak pernah menghasilkan nilai yang sama. Hasil pengukuran berulang tersebut akan terdistribusi di sekitar nilai benar-nya dan mengikuti distribusi normal (Gausian).
Random error dapat ditentukan dengan menggunakan metode statistik.
Selanjutnya pada penelitian ini kesalahan yang terjadi sistem otomasi merupakan kesalahan sistematis yang berasal dari instrumental itu sendiri karena belum mencapai kestabilan dalam pengukuran. Oleh karena itu cara mengatasi serta mengecek kesalahan atau errors tersebut dengan membandingkan instrumen yang memiliki karakter sama yang sudah terstandar seperti pada penelitian sebelumnya [14]. Adapun untuk mencegah kesalahan instrumental kita dapat memerhatikan yang pertama adalah pemilihan instrumen yang tepat untuk pemakaian terntentu. Kedua menggunakan faktor-faktor koreksi setelah banyaknya kesalahan instrumental dan terakhir mengkalibrasi dengan instrumen standar.
3.2 Sistem Otomasi Sebagai Mode Preparasi
Pengujian sistem pada mode preparasi yakni dengan melihat nilai ADC baik pada media konsentrat maupun pada media air murni (Gambar 10). Dari grafik diatas, nilai ADC pada air murni berkisar antara 40 –50 dengan nilai rata-rata dari data sebesar 45.18. Sedangkan nilai ADC pada air konsentrat berkisar antara 35 – 45 dengan nilai rata-rata dari data sebesar 39.64. Dari perbandingan data tersebut mengindikasikan desain sensor optik bisa digunakan untuk alat instrumentasi ini untuk membedakan jenis kekeruhan sampel [21]. Namun demikian jarak antara media murni dengan media yang terkonsentrasi perlu diperlebar untuk mempermudah analisis. Dari sisi fluktuasi masih terdapat data yang berfluktuatif khususnya pada saat pembacaan media terkonsentrasi hal ini dikarenakan sensor optik belum mencakup luasan pembacaan ADC, sehingga dimungkinkan ketika media yang terkonsentrasi namun tidak terdapat partikel yang menghalangi sensor [22].
Gambar 10. Nilai ADC pada air murni dan air konsentrat
Selanjutnya dengan mengetahui nilai konsetrat ADC maka kita bisa mengetahui batas pembacaan sensor pada percobaan kali ini. Adapun nilai yang didapat menggunakan sistem otomasi ini berkisar 35-45 yang dengan rata-rata pembacaan 39.64 dimana lebih kecil dibandingkan nilai ADC air murni. Berdasarkan penelitian
doi https://doi.org/10.21776/ub.jkptb.2021.009.02.03 sebelumnya apabila suatu larutan memiliki kandungan logam maka bisa dideteksi dengan sensor TDS (Total
Dissolve Solid) [12].
3.3 Pengujian Sensor Flowmeter
Tujuan dilakukannya pengujian sistem sensor flow adalah untuk megetahui apakah sistem yang sudah dibuat mampu memberikan respon terhadap setiap perubahan mode (sampling dan preparasi) serta kestabilan dari pembacaan data flowrate.
Gambar 11. Grafik pembacaan ADC terhadap waktu
Dari data grafik tersebut di atas dapat dilihat bahwa kestabilan sensor flowrate dalam menghasilkan nilai ADC dengan nilai regresi llinear sebesar R2=0.9788 yang menunjukan bahwa hasil pengujian bersifat linear dan
stabil. Namun dengan demikian masih didapati juga penundaan respon yakni selama kurang lebih 3 detik pada saat titik awal permulaan pembacaan sensor flowrate. Hal tersebut kemungkinan disebabkan oleh kecepatan aliran media belum sampai ke flowmeter pada saat flowmeter sudah mulai membaca. Kestabilan sensor harus diuji secara statistik untuk memperoleh nilai validasi yang dapat dipercaya. Setelah dilakukan pengujian, dapat dianalisa bahwa sistem otomasi radiocesium tersebut dapat digunakan untuk membedakan media preparasi dari ekstraksi radiocesium serta dapat digunakan untuk kebutuhan pengambilan sampel air di laut untuk menentukan kualitas air laut apakah tercemar dengan radioaktif radiocesium atau tidak.
4. Kesimpulan
Secara keseluruhan sistem instrumentasi ini dapat digunakan dan diaplikasikan di lapangan. Dari penelitian yang sudah dilakukan dapat disimpulkan sistim instrumentasi dan otomasi tersebut sudah berhasil mengintegrasikan antara platform Arduino dan LabVIEW beserta dengan perangkat sensor-sensor, pompa dan
relay. Dari data yang dihasilkan pada mode sampling memiliki error sebesar 4% - 20% namun penulis memiliki
asumsi jika inputan semakin besar maka nilai error akan menjadi semakin kecil hal ini dikarenakan alat menuju kestabilan tertinggi. Pada mode preparasi nilai ADC pada media air murni berkisar antara 40 – 50 dan media terkonsentrasi sebesar 35 – 45 dengan nilai rata-rata masing-masing sebesar 45.18 dan 39.4. Dengan rentan tersebut sistem instrumentasi dan otomasi sudah bisa memutuskan nilai batas berhenti pada saat mode preparasi. Untuk hasil pengujian sensor flowrate, data yang dihasilkan cukup bagus dan menandakan sensor flowrate cukup stabil dalam melakukan pembacaan.
VOLUME (liter)
Jumlah Pulsa Berdasarkan Volume
Jumlah pulsa berdasarkan volume
doi https://doi.org/10.21776/ub.jkptb.2021.009.02.03 Daftar Pustaka
[1] R. F. Lutfiana, “Globalisasi Ekonomi, Uu Neoliberal Dan Masa Depan Kekayaan Sda Indonesia,” J.
Pendidik. Ilmu Sos., vol. 23, no. 2, p. 68, 2016, doi: 10.17509/jpis.v23i2.1620.
[2] M. Yamamoto et al., “Isotopic Pu, Am and Cm signatures in environmental samples contaminated by the Fukushima Dai-ichi Nuclear Power Plant accident,” J. Environ. Radioact., vol. 132, pp. 31–46, 2014, doi: 10.1016/j.jenvrad.2014.01.013.
[3] D. Tsumune, T. Tsubono, M. Aoyama, and K. Hirose, “Distribution of oceanic 137Cs from the Fukushima Dai-ichi Nuclear Power Plant simulated numerically by a regional ocean model,” J. Environ. Radioact., vol. 111, no. 3, pp. 100–108, 2012, doi: 10.1016/j.jenvrad.2011.10.007.
[4] G. Steinhauser, A. Brandl, and T. E. Johnson, “Comparison of the Chernobyl and Fukushima nuclear accidents: A review of the environmental impacts,” Sci. Total Environ., vol. 470–471, pp. 800–817, 2014, doi: 10.1016/j.scitotenv.2013.10.029.
[5] D. H. Yanto and S. Permana, “Experimental Investigation of Natural Circulation in a Single-Phase Loop with Different Widths,” vol. 8, no. June, pp. 24–30, 2020, doi: 10.18178/ijeee.8.2.24-30.
[6] D. Hariyanto, S. Permana, and Suprijadi, “Experimental and simulation approach of the loop geometry effect on the natural circulation system of the advanced nuclear reactor,” Int. J. Energy Res., vol. 45, no. 8, pp. 11892–11903, 2021, doi: 10.1002/er.5903.
[7] D. Hariyanto, S. Permana, and Suprijadi, “Geometry aspect review of the natural circulation system as innovation in passive cooling of nuclear reactor,” IOP Conf. Ser. Earth Environ. Sci., vol. 753, no. 1, p. 012015, 2021, doi: 10.1088/1755-1315/753/1/012015.
[8] D. Hariyanto and S. Permana, “Experimental Study of Thermal Behavior of a Single-phase Natural Circulation Loop with Vertical Heater and Cooler,” J. Phys. Conf. Ser., vol. 1949, no. 1, p. 012024, 2021, doi: 10.1088/1742-6596/1949/1/012024.
[9] M. N. Yahya, H. Suseno, M. Makmur, D. Irawan, Y. Priasetyono, and W. R. Prihatiningsih, “Novel design and implementation extraction 137Cs from seawater integrated with water quality checker,” IOP Conf.
Ser. Earth Environ. Sci., vol. 584, no. 1, 2020, doi: 10.1088/1755-1315/584/1/012023.
[10] H. Suseno and W. R. Prihatiningsih, “Monitoring 137Cs and 134Cs at marine coasts in Indonesia between 2011 and 2013,” Mar. Pollut. Bull., vol. 88, no. 1–2, pp. 319–324, 2014, doi: 10.1016/j.marpolbul.2014.08.024.
[11] Sabar, S. K. Wijaya, and D. M. N. Anjani, “Water Level Detection System using Virtual Instrumentation for Monitoring Flood,” Al-Fiziya J. Mater. Sci. Geophys. Instrumentation, Theor. Phys., vol. 4, no. I, pp. 29–35, 2021, doi: 10.12408.
[12] Sabar et al., “Pengujian Kadar Zat Terlarut Memanfaatkan Sistem Instrumentasi Maya untuk Penentuan Kualitas Air Bersih,” J. Sci. Appl. Technol., vol. 5, no. April, pp. 319–324, 2021, doi: 10.35472/jsat.v5i2.412.
[13] Sabar, A. H. Saputro, and C. Imawan, “Salt Content Prediction System of Dried Sea Cucumber (Beche-de-mer) Based on Visual Near-Infrared Imaging,” 2019 4th Asia-Pacific Conf. Intell. Robot Syst. ACIRS 2019, pp. 245–249, 2019, doi: 10.1109/ACIRS.2019.8935953.
[14] Sabar, A. H. Saputro, and C. Imawan, “Moisture Content Prediction System of Dried Sea Cucumber (Beche-de-mer) Based on Visual Near-Infrared Imaging,” Proc. 2019 6th Int. Conf. Instrumentation,
Control. Autom. ICA 2019, no. August, pp. 167–171, 2019, doi: 10.1109/ICA.2019.8916705.
[15] Sabar, A. H. Saputro, and C. Imawan, “Salt Content Prediction System of Dried Sea Cucumber (Beche-de-mer) Based on Visual Near-Infrared Imaging,” 2019 4th Asia-Pacific Conf. Intell. Robot Syst. ACIRS 2019,
doi https://doi.org/10.21776/ub.jkptb.2021.009.02.03 pp. 245–249, 2019, doi: 10.1109/ACIRS.2019.8935953.
[16] D. Hariyanto, “Studi Intensitas Radiasi Menggunakan Survey Meter Berbasis Tabung Geiger M4011 dan Mikrokontroler Arduino Uno,” Pros. SNIPS, no. June 2020, 2019.
[17] D. Hariyanto, “Rancang Bangun Alat Ukur Panjang Objek di Dalam Air Berbasis Photogate dan Sensor Ultrasonik,” Pros. SNIPS 2018, no. July, 2018.
[18] D. Hariyanto, “Deteksi Letak Kebocoran Pipa Berdasarkan Analisis Debit Air Menggunakan Teknologi Sensor Flowmeter Berbasis TCP / IP,” Teor. dan Apl. Fis., vol. 5, no. 1, pp. 25–30, 2017.
[19] Digi Key Electronics, “Data Sheet Photodioda Sensor.” components101.com, 2020, [Online]. Available: https://components101.com/diodes/photodiode-pinout-datasheet.
[20] Digi Key Electronics, “MODEL : YF-S201 Description : Features : Specifications : Application : Cercuit :,”
https://components101.com/diodes/photodiode-pinout-datasheet, p. 304, 2021.
[21] L. E. Manik, M. E. I. Najoan, A. M. Rumagit, and B. A. Sugiarso, “Rancang Bangun Aplikasi Sistem Pendeteksi Kekeruhan Air Menggunakan Mikrokontroler Avr Atmega 8535,” J. Tek. Elektro dan Komput., vol. 2, no. 5, pp. 1–6, 2013, doi: 10.35793/jtek.2.5.2013.3362.
[22] A. F. Maemunnur and G. Wiranto, “Untuk Analisis Kualitas Air Berbasis Arduino,” vol. 4, no. 1, pp. 2–9, 2016.