BAB II
LANDASAN TEORI
2.1 Macam-macam Bentuk Robot 1. Mobile Robot
Robot Mobil atau Mobile Robot adalah konstruksi robot yang ciri khasnya adalah mempunyai aktuator berupa roda untuk menggerakkan keseluruhan badan robot tersebut, sehingga robot tersebut dapat melakukan perpindahan posisi dari satu titik ke titik yang lain.Robot mobil ini sangat disukai bagi orang yang mulai mempelajari robot.Hal ini karena membuat robot mobil tidak memerlukan kerja fisik yang berat.Untuk dapat membuat sebuah robot mobile minimal diperlukan pengetahuan tentang mikrokontroler dan sensor-sensor elektronik.Base robot mobil dapat dengan mudah dibuat dengan menggunakan plywood / triplek, akrilik sampai menggunakan logam ( aluminium ). Robot mobil dapat dibuat sebagai pengikut garis ( Line Follower ) atau pengikut dinding ( Wall Follower ) ataupun pengikut cahaya.
2. Mobile Jaringan
tuntutan teknis yang jauh lebih kompleks.Salah satu robot jaringan yang sudah berhasil dikembangkan adalah LIPI Wireless Robot (LWR) yang dikembangkan oleh Grup Fisika 6 Teoritik dan Komputasi – GFTK LIPI.Seperti ditunjukkan di LWR, seluruh proses kontrol dan monitoring bisa dilakukan melalui perambah internet. Lebih jauh, seluruh sistem dan protokol yang dikembangkan untuk LWR ini telah dibuka sebagai open-source dengan lisensi GNU Public License (GPL) di SourceForge dengan nama openNR.
3. Robot Manipulator ( robot tangan )
Robot ini hanyak memiliki satu tangan seperti tangan manusia yang fungsinya untuk memegang atau memindahkan barang, contoh robot ini adalah robot las di Industri mobil, robot merakit elektronik dll.
4. Robot Humanoid
Robot yang memiliki kemampuan menyerupai manusia, baik fungsi maupun cara bertindak, contoh robot ini adalah Ashimo yang dikembangkan oleh Honda. Robot adalah sebuah alat mekanik yang dapat melakukan tugas fisik, baik menggunakan pengawasan dan kontrol manusia, ataupun menggunakan program yang telah didefinisikan terlebih dulu (kecerdasan buatan). hiburan, dan alat pembantu rumah tangga, seperti penyedot debu, dan pemotong rumput.
5. Robot Berkaki
6. Flying Robot ( Robot Terbang )
Robot yang mampu terbang, robot ini menyerupai pesawat model yang deprogram khusus untuk memonitor keadaan di tanah dari atas, dan juga untuk meneruskankomunikasi.
2.2. Robot Line Follower Omniwheel- dan non omniwheel
Robot Line Follower merupakan suatu bentuk robot bergerak otonom yang mempunyai misi mengikuti suatu garis pandu yang telah ditentukan.Robot line follower ini pada bagiannya bawahnya mempunyai sensor lantai, sehingga dapat
2.3 LED Infra Merah
LED adalah suatu bahan semikonduktor yang memancarkan cahaya monokromatik yang tidak koheren ketika diberi tegangan maju. Pengembangan LED dimulai dengan alat inframerah dibuat dengan galliumarsenide. Cahaya infra merah pada dasarnya adalah radiasi elektromagnetik dari panjang gelombang yang lebih panjang dari cahaya tampak, tetapi lebih pendek dari radiasi gelombang radio, dengan kata lain infra merupakan warna dari cahaya tampak dengan gelombang terpanjang, yaitu sekitar 700 nm sampai 1 mm.
Gambar 2.1 Inframerah
Cahaya LED timbul sebagai akibat penggabungan elektron dan hole pada persambungan antara dua jenis semikonduktor dimana setiap penggabungan disertaidengan pelepasan energi. Pada penggunaannya LED infra merah dapat diaktifkan dengan tegangan DC untuk transmisi atau sensor jarak dekat, dan dengan teganganAC (30–40 KHz) untuk transmisi atau sensor jarak jauh
2.4 Photodioda
Gambar 2.2. Photodioda
Photodioda merupakan sensor cahaya semikonduktor yang dapat mengubah besaran cahaya menjadi besaran listrik. Photodioda merupakan sebuah dioda dengan sambungan p-n yang dipengaruhi cahaya dalam kerjanya. Cahaya yang dapat dideteksi oleh photodioda ini mulai dari cahaya infra merah, cahaya tampak, sinar-X.
sifat dari Photodioda adalah :
1. Jika terkena cahaya maka resistansi nya berkurang
2. Jika tidak terkena cahaya maka resistansi nya meningkat.
2.5. sensor inframerah TCRT5000
Gambar 2.3 modul TCRT5000
Untuk mendeteksi ada atau tidaknya barang di depan robot, digunakan sensor jarak yang berbasis pada inframerah juga. Modul yang digunakan adalah modul sensor E18-D80NK. Modul ini mempunyai lensa untuk memfokuskan pengiriman dan penerimaan sinyal inframerah, sehingga modul ini dapat digunakan untuk mendeteksi inframerah sampai pada 80cm. Jangakauan sensor ini dapat diubah sesuai kebutuhan dengan cara memutar trimmer yang ada pada belakang sensor ini. Sensor barang digunakan untuk mendeteksi ada tidaknya barang diahadapan robot. Ketika sensor ini mendeteksi adanya barang di depannya, sensor akan mengirimkan logika 0 pada mikrokontroler
2.6 Limit switch
dari limit switch adalah sebagai sensor posisi suatu benda (objek) yang bergerak. Simbol limit switch ditunjukan pada gambar berikut.
Gambar 2.4. Simbol dan bentuk limit Switch
Limit switch umumnya digunakan untuk : Memutuskan dan menghubungkan rangkaian menggunakan objek atau benda lain. Menghidupkan daya yang besar, dengan sarana yang kecil. Sebagai sensor posisi atau kondisi suatu objek. Prinsip kerja limit switch diaktifkan dengan penekanan pada tombolnya pada batas/daerah yang telah ditentukan sebelumnya sehingga terjadi pemutusan atau penghubungan rangkaian dari rangkaian tersebut. Limit switch memiliki 2 kontak yaitu NO (Normally Open) dan kontak NC (Normally Close) dimana salah satu kontak akan aktif jika tombolnya tertekan.
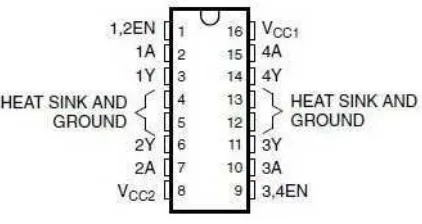
2.7 Driver L293D
Gambar 2.5 konfigurasi Pin Driver L293D Fungsi Pin Driver Motor DC IC L293D
1. Pin EN (Enable, EN1.2, EN3.4) berfungsi untuk mengijinkan driver menerima perintah untuk menggerakan motor DC.
2. Pin In (Input, 1A, 2A, 3A, 4A) adalah pin input sinyal kendali motor DC 3. Pin Out (Output, 1Y, 2Y, 3Y, 4Y) adalah jalur output masing-masing driver
yang dihubungkan ke motor DC Pin VCC (VCC1, VCC2) adalah jalur input tegangan sumber driver motor DC, dimana VCC1 adalah jalur input sumber tegangan rangkaian kontrol dirver dan VCC2 adalah jalur input sumber tegangan untuk motor DC yang dikendalikan.
4. Pin GND (Ground) adalah jalu yang harus dihubungkan ke ground, pin GND ini ada 4 buah yang berdekatan dan dapat dihubungkan ke sebuah pendingin kecil.
2.8 Push button switch
akan bekerja sebagai device penghubung atau pemutus aliran arus listrik saat tombol ditekan, dan saat tombol tidak ditekan (dilepas), maka saklar akan kembali pada kondisi normal.
Gambar 2.6 Push button switch
Sebagai device penghubung atau pemutus, push button switch hanya memiliki 2 kondisi, yaitu On dan Off (1 dan 0). Istilah On dan Off ini menjadi sangat penting karena semua perangkat listrik yang memerlukan sumber energi listrik pasti membutuhkan kondisi On dan Off.
Karena sistem kerjanya yang unlock dan langsung berhubungan dengan operator, push button switch menjadi device paling utama yang biasa digunakan untuk memulai dan mengakhiri kerja mesin di industri. Secanggih apapun sebuah mesin bisa dipastikan sistem kerjanya tidak terlepas dari keberadaan sebuah saklar seperti push button switch atau perangkat lain yang sejenis yang bekerja mengatur pengkondisian On dan Off.
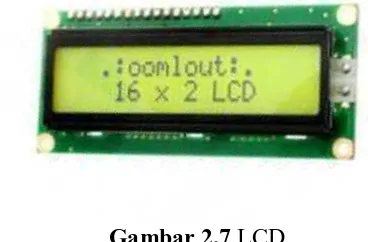
2.9 . LCD
CMOS logic yang bekerja dengan tidak menghasilkan cahaya tetapi memantulkan cahaya yang ada di sekelilingnya terhadap front-lit atau mentransmisikan cahaya dari back-lit. LCD (Liquid Cristal Display) berfungsi sebagai penampil data baik dalam bentuk karakter, huruf, angka ataupun grafik.
Material LCD (Liquid Cristal Display) LCD adalah lapisan dari campuran organik antara lapisan kaca bening dengan elektroda transparan indium oksida dalam bentuk tampilan seven-segment dan lapisan elektroda pada kaca belakang. Ketika elektroda diaktifkan dengan medan listrik (tegangan), molekul organik yang panjang dan silindris menyesuaikan diri dengan elektroda dari segmen. Lapisan sandwich memiliki polarizer cahaya vertikal depan dan polarizer cahaya horisontal belakang yang diikuti dengan lapisan reflektor. Cahaya yang dipantulkan tidak dapat melewati molekul-molekul yang telah menyesuaikan diri dan segmen yang diaktifkan terlihat menjadi gelap dan membentuk karakter data yang ingin ditampilkan
Gambar 2.7 LCD
Memori yang digunakan microcontroler internal LCD adalah :
2. CGROM (Character Generator Read Only Memory) merupakan memori untuk menggambarkan pola sebuah karakter dimana pola tersebut merupakan karakter dasar yang sudah ditentukan secara permanen oleh pabrikan pembuat LCD (Liquid Cristal Display) tersebut sehingga pengguna tinggal mangambilnya sesuai alamat memorinya dan tidak dapat merubah karakter dasar yang ada dalam CGROM.
Register control yang terdapat dalam suatu LCD diantaranya adalah.
1. Register perintah yaitu register yang berisi perintah-perintah dari mikrokontroler ke panel LCD (Liquid Cristal Display) pada saat proses penulisan data atau tempat status dari panel LCD (Liquid Cristal Display) dapat dibaca pada saat pembacaan data.
2. Register data yaitu register untuk menuliskan atau membaca data dari atau keDDRAM. Penulisan data pada register akan menempatkan data tersebut keDDRAM sesuai dengan alamat yang telah diatur sebelumnya.
Pin, kaki atau jalur input dan kontrol dalam suatu LCD (Liquid Cristal Display) diantaranya adalah :
1. Pin data adalah jalur untuk memberikan data karakter yang ingin ditampilkan menggunakan LCD (Liquid Cristal Display) dapat dihubungkan dengan bus data dari rangkaian lain seperti mikrokontroler dengan lebar data 8 bit.
3. Pin R/W (Read Write) berfungsi sebagai instruksi pada modul jika low tulis data, sedangkan high baca data. Pin E (Enable) digunakan untuk memegang data baik masuk atau keluar.
4. Pin VLCD berfungsi mengatur kecerahan tampilan (kontras) dimana pin ini dihubungkan dengan trimpot 5 Kohm, jika tidak digunakan dihubungkan ke ground, sedangkan tegangan catu daya ke LCD sebesar 5 Volt.
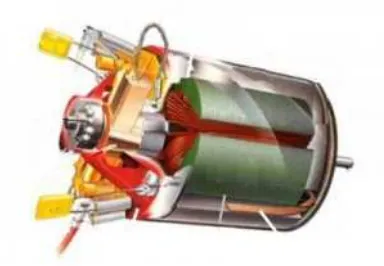
2.10. Motor DC
Motor DC adalah motor listrik yang memerlukan suplai tegangan arus searah pada kumparan medan untuk diubah menjadi energi gerak mekanik. Kumparan medan pada motor dc disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Motor arus searah, sebagaimana namanya, menggunakan arus langsung yang tidak langsung/direct-unidirectional.
Motor DC memiliki 3 bagian atau komponen utama untuk dapat berputar sebagai berikut.
1. Bagian Atau Komponen Utama MOtor DC Kutub medan. Motor DC sederhana memiliki dua kutub medan: kutub utara dan kutub selatan. 2. Current Elektromagnet atau Dinamo. Dinamo yang berbentuk silinder,
dihubungkan ke as penggerak untuk menggerakan beban. Untuk kasus motor DC yang kecil, dinamo berputar dalam medan magnet yang dibentuk oleh kutub-kutub, sampai kutub utara dan selatan magnet berganti lokasi. 3. Commutator. Komponen ini terutama ditemukan dalam motor DC.
Gambar 2.8. Motor DC
2. 11. Mikrokontroler ATMega 16
Mikrokontroler merupakan sebuah single chip yang didalamnya telah dilengkapi dengan CPU (Central Processing Unit), RAM (Random Access Memori), ROM (Read Only Memori), Input dan Output, Timer/Counter, Serial com port secara spesifik digunakan untuk aplikasi – aplikasi kontrol dan aplikasi serbaguna. Perangkat ini sering digunakan untuk kebutuhan kontrol tertentu seperti pada sebuah penggerak motor. Read Only Memori (ROM) yang isinya tidak berubah meskipun IC kehilangan catu daya. Memori penyimpanan program dinamakan sebagai memori program. Random Access Memori (RAM) isinya akan langsung hilang ketika IC kehilangan
catudaya yang dipakai untuk menyimpan data pada saat program bekerja. RAM yang dipakai untuk menyimpan data ini disebut sebagai memori data.
Mikrokontroler biasanya dilengkapi dengan UART (Universal Asychronous Receiver Transmitter) yaitu port serial komunikasi serial asinkron, USART (Universal
Syncrhronous and Asyncrhronous Serial Receiver and Transmitter) yaitu port yang
CAN (Control Area Network) merupakan standart pengkabelan SAE (Society of Automatic Engineers).
Mikrokontroler saat ini sudah dikenal dan digunakan secara luas pada dunia industri. Banyak sekali penelitian atau proyek mahasiswa yang menggunakan berbagai versi mikrokontroler yang dapat dibeli dengan harga yang relative murah. Mikrokontroler saat ini merupakan chip utama pada hamper setiap peralatan elektronika canggih. Mikrokontroler AVR memiliki arsitektur RISC 8 bit, dimana semua instruksi dikemas dalam kode 16 bit (16 bit word) dan sebagian besar instruksi dieksekusi dalam satu siklus clock, berbeda dengan instruksi CS51 yang membutuhkan siklus 12 clock. AVR berteknologi RISC (Reduce Instruction Set Computing), sedangkan seri MCS51berteknologi CISC (Complex Instruction Set
Computing). Secara umum, AVR dikelompokkan menjadi beberapa kelas, yaitu
keluarga AT90Sxx, keluarga ATMega dan AT86RFxx. Pada dasarnya yang membedakan masing – masing kelas adalah memori, peripheral dan fungsinya. Dari segi arsitektur dan instruksi yang digunakan, mereka bias dikatakan hampir sama.
2.11.1 Fitur Mikrocontroler ATMega 16
Fitur-fitur yang dimiliki ATMega 16 sebagai berikut :
1. Microcontroller AVR 8 bit yang memiliki kemampuan tinggi, dengan daya rendah.
2. Arsitektur RISC dengan throughput mencapai 16 MIPS pada frekuensi 16MHz.
4. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, dan Port D. 5. CPU yang terdiri atas 32 buah register.
6. Unit interupsi internal dan eksternal. 7. Port USART untuk komunikasi serial.
Fitur Peripheral.
a. Tiga buah Timer/ Counter dengan kemampuan pembandingan.
1. 2(dua) buah Timer/ Counter 8 bit dengan Prescaler terpisah dan Mode Compare.
2. 1(satu) buah Timer/ Counter 16 bit dengan Prescaler terpisah, Mode Compare, dan Mode Capture.
b. Real Time Counter dengan Oscillator tersendiri. c. 4 channel PWM
d. 8 channel, 10 bit ADC.
1. 8 Single-ended Channel.
2. 7 Differential Channel hanya pada kemasan TQFP.
3. 2 Differential Channel dengan Programmable Gain 1x, 10x, atau 200x.
e. Byte-oriented Two-wire Serial Interface. f. Programmable Serial USART.
g. Antarmuka SPI.
h. Watchdog Timer dengan oscillator internal.
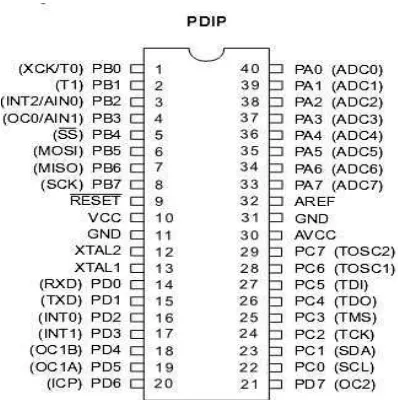
2.11.2 Konfigurasi PIN ATMega 16
Konfigurasi pin ATMega 16 dengan kemasan 40 pin DIP (Dual Inline Package) dapat dilihat Dari gambar dibawah ini dapat dijelaskan fungsi dari
masing-masing pin ATMega 16 sebagai berikut :
1. VCC merupakan pin yang berfungsi sebagai masukan catu daya. 2. GND merupakan pin Ground.
3. Port A (PA.0...PA.7) merupakan pin input/ output dua arah dan pin masukan ADC.
4. Port B (PB.0...PB.7) merupakan pin input/ output dua arah dan pin fungsi khusus,
5. Port C (PC.0...PC.7) merupakan pin input/ output dua arah dan pin fungsi
Khusus
6. Port D(PD.0...PD.7) merupakan pin input/ output dua arah dan pin fungsi
khusus
7. RESET merupakan pin yang digunakan untuk me-reset mikrokontroler. 8. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal.
9. AVCC merupakan pin masukan tegangan untuk ADC. 10. AREF merupakan pin masukan tegangan referensi ADC.
Gambar 2.9 konfigurasi Pin ATMega 16 PDIP
Berikut ini penjelasan mengenai konfigurasi pin ATMega 16 sebagai berikut 1. Port A (PA7..PA0) Port A berfungsi sebagai input analog pada konverter A/D.
Port A juga sebagai suatu port I/O 8-bit dua arah, jika A/D konverter tidak digunakan. Pin - pin Port dapat menyediakan resistor internal pull-up (yang dipilih untuk masing-masing bit). Port A output buffer mempunyai karakteristik gerakan simetris dengan keduanya sink tinggi dan kemampuan sumber. Ketika pin PA0 ke PA7 digunakan sebagai input dan secara eksternal ditarik rendah, pin– pin akan memungkinkan arus sumber jika resistor internal pull-up diaktifkan. Port A adalah tri-stated manakala suatu kondisi reset menjadi aktif, sekalipun waktu habis.
sumber. Sebagai input, Pin B yang secara eksternal ditarik rendah akan arus sumber jika resistor pull-up diaktifkan. Pin B adalah tri-stated manakala suatu kondisi reset menjadi aktif, sekalipun waktu habis.
3. Port C (PC7..PC0)Pin C adalah suatu pin I/O 8-bit dua arah dengan resistor internal pull-up (yang dipilih untuk beberapa bit). Pin C output buffer mempunyai karakteristik gerakan simetris dengan keduanya sink tinggi dan kemampuan sumber. Sebagai input, pin C yang secara eksternal ditarik rendah akan arus sumber jika resistor pull-up diaktifkan. pin C adalah tri-stated manakala suatu kondisi reset menjadi aktif, sekalipun waktu habis.
4. Port D (PD7..PD0) Pin D adalah suatu pin I/O 8-bit dua arah dengan resistor internal pull-up (yang dipilih untuk beberapa bit). Pin D output buffer mempunyai karakteristik gerakan simetris dengan keduanya sink tinggi dan kemampuan sumber. Sebagai input, pin D yang secara eksternal ditarik rendah akan arus sumber jika resistor pull-up diaktifkan. Pin D adalah tri-stated manakala suatu kondisi reset menjadi aktif, sekalipun waktu habis.
• RESET (Reset input) • XTAL1 (Input Oscillator) • XTAL2 (Output Oscillator)
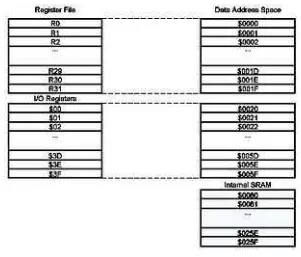
2.11.3 Peta Memori ATMega 16
ATMega 16 memiliki dua jenis memori yaitu Data Memori dan Program Memori ditambah satu fitur tambahan yaitu EEPROM Memori untuk penyimpan data.
1. Memori Program
Arsitektur ATMega16 mempunyai dua memori utama, yaitu memori data dan memori program. Selain itu, ATMega16 memiliki memori EEPROM untuk menyimpan data. ATMega16 memiliki 16K byte On-chip In-System Reprogrammable Flash Memory untuk menyimpan program.
Instruksi ATMega16 semuanya memiliki format 16 atau 32 bit, maka memori flash diatur dalam 8K x 16 bit. Memori flash dibagi kedalam dua bagian, yaitu bagian program boot dan aplikasi. Bootloader adalah program kecil yang bekerja pada saat sistem dimulai yang dapat memasukkan seluruh program aplikasi ke dalam memori prosesor.
2. Memori Data (SRAM)
Gambar 2.10 peta memori ATMega 16 3. Memori Data EEPROM
ATMega16 terdiri dari 512 byte memori data EEPROM 8 bit, data dapat ditulis/dibaca dari memori ini, ketika catu daya dimatikan, data terakhir yang ditulis pada memori EEPROM masih tersimpan pada memori ini, atau dengan kata lain memori EEPROM bersifat nonvolatile. Alamat EEPROM mulai dari $000 sampai $1FF.
4. Analog To Digital Converter
disesuaikan dengan kebutuhan dari ADC itu sendiri. ADC pada ATMega16 memiliki fitur-fitur antara lain :
1. AREF adalah pin referensi analog untuk konverter A/D. 2. Resolusi mencapai 10-bit
3. Akurasi mencapai ± 2 LSB 4. Waktu konversi 13-260µs
5. 8 saluran ADC dapat digunakan secara bergantian
6. Jangkauan tegangan input ADC bernilai dari 0 hingga VCC 7. Disediakan 2,56V tegangan referensi internal ADC
8. Mode konversi kontinyu atau mode konversi tunggal 9. Interupsi ADC complete
10. Sleep Mode Noise canceler
2.12 Bahasa Pemograman BASCOM-AVR
digunakan, karena ditulis dengan bahasa manusia yang lebih mudah dimengerti dan tidak tergantung pada mesin.
Penulisan program dalam bahasa BASCOM-AVR ini tidak mengenal aturan penulisan dikolam tertentu. Jadi bisa dimulai dari kolom manapun. Namun demikian, untuk mempermudah dalam pembacaan program dan untuk keperluan dokumentasi, sebaiknya penulisan program dalam bahasa BASCOM-AVR ini diatur sedemikian rupa sehingga mudah dibaca.
2.13 Komponen-Komponen Pendukung 2.13.1. Resistor
Resistor adalah komponen dasar elektronika yang digunakan untuk membatasi jumlah arus yang mengalir dalam suatu rangkaian. Kemampuan resistor dalam menghambat arus listrik sangat beragam disesuaikan dengan nilai resistansi resistor tersebut. Resistor bersifat resistif dan umumnya terbuat dari bahan karbon. Satuan resistansi dari suatu resistor disebut Ohm atau dilambangkan dengan simbol Ω (Omega). Bentuk resistor yang umum adalah seperti tabung dengan dua kaki di kiri dan kanan. Pada badannya terdapat lingkaran membentuk cincin kode warna untuk mengetahui besar resistansi tanpa mengukur besarnya dengan Ohmmeter. Kode warna tersebut adalah standar manufaktur yang dikeluarkan oleh EIA (Electronic Industries Association).
lain : Potensiometer dan Trimpot. Selain itu ada juga Resistor yang nilai resistansinya berubah bila terkena cahaya namanya LDR ( Light Dependent Resistor ) dan Resistor yang yang nilai resistansinya berubah tergantung dari suhu disekitarnya namanya NTC ( Negative Thermal Resistance .
Fungsi resistor adalah sebagai pengatur dalam membatasi jumlah arus yang mengalir dalam suatu rangkaian. Dengan adanya resistor menyebabkan arus listrik dapat disalurkan sesuai dengan kebutuhan. Adapun fungsi resistor secara lengkap adalah sebagai berikut :
1. Berfungsi untuk menahan sebagian arus listrik agar sesuai dengan kebutuhan suatu rangkaian elektronika.
2. Berfungsi untuk menurunkan tegangan sesuai dengan yang dibutuhkan oleh rangkaian elektronika.
3. Berfungsi untuk membagi tegangan.
4. Berfungsi untuk membangkitkan frekuensi tinggi dan frekuensi rendah dengan bantuan transistor daan kondensator (kapasitor).
2.13.2. Dioda
Dioda adalah komponen aktif bersaluran dua (dioda termionik mungkin memiliki saluran ketiga sebagai pemanas). Dioda mempunyai dua elektroda aktif dimana isyarat dapat mengalir, dan kebanyakan dioda digunakan karena karakteristik satu arah yang dimilikinya. Dioda varikap (Variable Capacitor/kondensator variabel) digunakan sebagai kondensator terkendali tegangan. Sifat kesearahan yang dimiliki sebagian besar jenis dioda seringkali disebut karakteristik menyearahkan. Fungsi paling umum dari dioda adalah untuk memperbolehkan arus listrik mengalir dalam suatu arah (disebut kondisi panjar maju) dan untuk menahan arus dari arah sebaliknya (disebut kondisi panjar mundur). Karenanya, dioda dapat dianggap sebagai versi elektronik dari katup.
Gambar 2.12 Dioda
2.13.3. Kapasitor
Sebuah kapasitor (sebelumnya dikenal sebagai kondensor) adalah pasif dua terminal komponen listrik yang digunakan untuk menyimpan energi dalam medan listrik . Bentuk-bentuk kapasitor praktis sangat bervariasi, tetapi semua mengandung setidaknya dua konduktor listrik yang dipisahkan oleh dielektrik (isolator). Kapasitor yang digunakan sebagai bagian dari sistem listrik, misalnya terdiri dari foil logam yang dipisahkan oleh sebuah lapisan film isolasi. Ketika ada perbedaan potensial (tegangan) di konduktor, statis medan listrik berkembang di dielektrik, menyebabkan muatan positif untuk mengumpulkan pada satu pelat dan muatan negatif di piring lain. Energi disimpan dalam medan elektrostatik. Sebuah kapasitor ideal adalah ditandai dengan nilai konstan tunggal, kapasitansi , diukur dalam farad.
2.14 Pengertian Sensor
sensor adalah suatu peralatan yang berfungsi untuk mendeteksi gejala-gejala atau sinyal-sinyal yang berasal dari perubahan suatu energi seperti energi listrik, energi fisika, energi kimia, energi biologi, energi mekanik dan sebagainya. Dalam memilih peralatan sensor dan transduser yang tepat dan sesuai dengan sistem yang akan disensor maka perlu diperhatikan persyaratan umum sensor berikut ini
a. Linearitas Sensor
b. Sensitivitas Sensor
Sensitivitas akan menunjukan seberapa jauh kepekaan sensor terhadap kuantitas yang diukur. Sensitivitas sering juga dinyatakan dengan bilangan yang menunjukan “perubahan keluaran dibandingkan unit perubahan masukan”.
c. Tanggapan Waktu Sensor (Respon Time)
Tanggapan waktu pada sensor menunjukan seberapa cepat tanggapannya terhadap perubahan masukan. Sebagai contoh, instrumen dengan tanggapan frekuensi yang jelek adalah sebuah termometer merkuri. Masukannya adalah temperatur dan keluarannya adalah posisi merkuri. Misalkan perubahan temperatur terjadi sedikit demi sedikit dan kontinyu terhadap waktu,
4.15 Lintasan line follower
1. Ketika sensor A mendeteksi garis sedangkan sensor B keluar garis ini berarti posisi robot berada lebih sebelah kanan dari garis, untuk itu motor kanan akan aktif sedangkan motor kiri akan mati. Akibatnya motor akan berbelok kearah kiri.
2. Begitu sebaliknya ketika sensor B mendeteksi garis, motor kiri aktif dan motor kanan mati, maka robot akan berbelok ke kanan.
3. Jika kedua sensor mendeteksi garis maka kedua motor akan aktif dan robot akan bergerak maju.