Lengan robot dengan penggerak motor stepper dan motor servo
Teks penuh
Gambar
Dokumen terkait
Berdasarkan hasil pengujian yang telah dilakukan terhadap “ Servo Kontroler Sebagai Penggerak Kaki Robot dengan Komunikasi Serial Berbasis Mikrokontroler ATmega16 ”
1. Implementasi sinyal dari electromyogram dan sensor accelerometer menjadi pengontrol gerakan lengan robot berhasil direalisasikan dan sistem bekerja sesuai dengan yang
Hasil eksperimen menunjukkan desain dan rancang bangun robot dengan dua model lengan, yaitu lengan pemegang shuttlecock menggunakan pneumatik sedangkan lengan
Sehingga modul Bluetooth HC-05 dapat mengetahui ketika sebuah paket data selesai dikirim dari aplikasi kontroler lengan robot smartphone Android. Gambar 14 Format frame
Dari hasil perancangan, pembuatan, pengujian dan analisa sistem pada penelitian dengan judul “Robot Lengan Pengambil Benda Untuk Membantu Pasien Dengan Perintah Suara
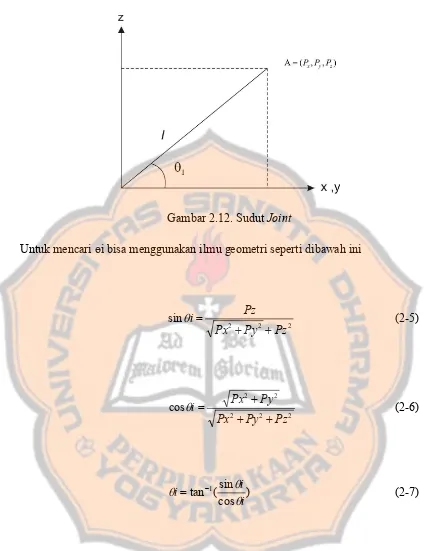
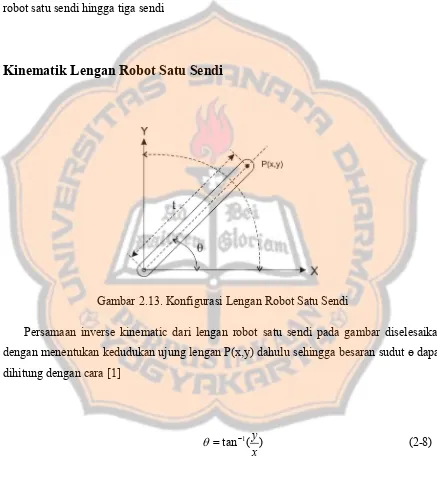
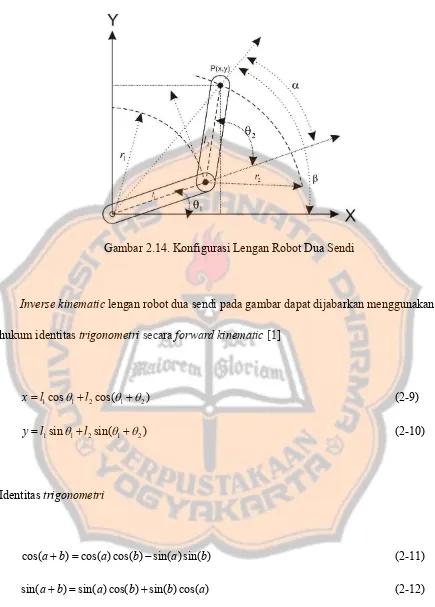
Dalam membuat lengan robot diperlukan algoritma yaitu algoritma Kinematics yang merupakan salah satu cabang studi yang mempelajari geometri tentang gerakan,
Pada sistem kendali lengan robot menggunakan metode pengolahan citra, tahapan yang bekerja secara garis besar yaitu, diawali dengan mendeteksi gerakan lengan
untuk memilih frekuensi yang akan diatur, Op amp untuk menguatkan amplitudo gelombang suara agar diterima arduino dengan baik, Arduino untuk menginisialisasi frekuensi dan
