bergerak di dalam zat cair
tersebut. Viskositas dalam zat cair, yang berperan adalah gaya kohesi antar partikel zat cair. Viskositas dapat dinyatakan sebagai tahanan aliran fluida yang merupakan gesekan antara molekul – molekul cairan satu dengan yang lain. Suatu jenis cairan yang mudah mengalir, dapat dikatakan memiliki viskositas yang rendah, dan sebaliknya bahan-bahan yang sulit mengalir dikatakan memiliki viskositas yang tinggi.Viskositas suatu fluida adalah sifat yang menunjukkan besar dan kecilnya tahanan dalam fluida terhadap gesekan. Fluida yang mempunyai viskositas rendah, misalnya air mempunyai tahanan dalam terhadap gesekan yang lebih kecil dibandingkan dengan fluida yang mempunyai viskositas yang lebih besar. Dengan sifat ini zat cair banyak digunakan dalam dunia otomotif yaitu sebagai pelumas mesin. Telah diketahui bahwa pelumas yang dibutuhkan tiap-tiap mesin berbeda-beda, sehingga sebelum menggunakan pelumas merek tertentu harus diperhatikan terlebih dahulu koefisien kekentalan pelumas sesuai atau tidak dengan tipe mesin.
Ada banyak metode yang bisa digunakan untuk mengukur viskositas suatu fluida atau cairan. Salah satunya adalah dengan metode bola jatuh. Metode ini menggunakan sebuah bola yang dijatuhkan pada sebuah tabung berisi fluida yang akan diukur, kemudian dicatat waktu tempuh bola dari satu titik ke titik yang lain. Dengan hukum Stokes waktu tempuh bola ini bisa digunakan untuk menghitung nilai viskositas fluida.
Akan tetapi penggunaan metode ini, terutama dengan peralatan eksperimen manual memiliki banyak kekurangan. Salah satunya yaitu pencatatan waktu tempuh bola yang kurang teliti. Ini menyebabkan nilai viskositas yang diperoleh memiliki nilai ralat yang besar atau kurang teliti. Untuk itu diperlukan otomatisasi untuk pencatatan waktu tempuh bola jatuh ini. Penggunaan sensor cahaya diharapkan bisa menjawab masalah ini. Selain itu juga dibutuhkan sebuah pengendali seperti mikrokontroler yang dapat mengendalikan sensor secara otomatis.
ketelitian yang tinggi dengan menggunakan sensor gerak dan mikrokontroler untuk memperoleh alat yang otomatis, dengan tujuan dapat dihasilkan sebuah alat ukur viskositas otomatis yang teliti.
Sedangkan batasan-batasan masalah dalam penelitian ini adalah Sensor yang digunakan adalah sensor cahaya LDR. Mikrokontroler yang digunakan adalah ATMega8535.
2. Tinjauan Pustaka 2.1.Hukum Stokes
Viskositas berasal dari kata viscous. Suatu bahan apabila dipanaskan sebelum menjadi cair terlebih dahulu menjadi viscousyaitu menjadi lunak dan dapat mengalir pelan-pelan. Viskositas dapat dianggap sebagai gerakan di bagian dalam (internal) fluida.
Jika sebuah benda berbentuk bola dijatuhkan ke dalam fluida kental, misalnya kelereng dijatuhkan ke dalam kolam renang yang airnya cukup dalam, nampak mula-mula kelereng bergerak dipercepat. Tetapi beberapa saat setelah menempuh jarak cukup jauh, nampak kelereng bergerak dengan kecepatan konstan (bergerak lurus beraturan). Ini berarti bahwa di samping gaya berat dan gaya apung zat cair masih ada gaya lain yang bekerja pada kelereng tersebut. Gaya ketiga ini adalah gaya gesekan yang disebabkan oleh kekentalan fluida.
Khusus untuk benda berbentuk bola, gaya gesekan fluida dirumuskan sebagai
F
s
6
rv
(1) dengan ηmenyatakan koefisien kekentalan, radalah jari-jari bola kelereng, dan v kecepatan relatif bola terhadap fluida. Persamaan (1) pertama kali dijabarkan oleh Sir George Stokes tahun 1845, sehingga disebut Hukum Stokes.[5]Dalam pemakaian eksperimen harus diperhitungkan beberapa syarat antara lain:
Tidak terjadi aliran turbulen dalam fluida.
Kecepatan v tidak terlalu besar sehingga aliran fluida masih bersifat laminer.
Sebuah bola padat yang memiliki rapat massa ρb dan berjari-jari r
dijatuhkan tanpa kecepatan awal ke dalam fluida kental yang memiliki rapat massa ρf, di mana ρb>ρf. Telah diketahui bahwa bola mula-mula mengalami
percepatan, namun beberapa saat setelah bergerak cukup jauh bola akan bergerak dengan kecepatan konstan. Kecepatan yang tetap ini disebut kecepatan akhir vTatau kecepatan terminal yaitu pada saat gaya berat bola
sama dengan gaya apung ditambah gaya gesekan fluida. Gambar 1 menunjukkan sistem gaya yang bekerja pada bola kelereng yakni FA= gaya Archimedes, FS= gaya Stokes, dan W=mg= gaya berat kelereng.
Gambar 1. Gaya yang bekerja pada saat bola dengan kecepatan tetap.
Jika saat kecepatan terminal telah tercapai, berlaku prinsip Newton tentang GLB (gerak lurus beraturan), yaitu
g
V
W
b.
b. (3)g V
FA
f. b. (4)Rapat massa bola ρb dan rapat massa fluida ρf dapat diukur dengan menggunakan b b b
V
m
(5) dan f f fV
m
(6)Dengan mensubstitusikan Persamaan (3) dan (4) ke dalam Persamaan (2) maka diperoleh
b f
bs V g
F
(7)Dengan mensubstitusikan Persamaan (1) ke dalam Persamaan (7) diperoleh
9
2 2 b f
T
g r
v (8)
Jarak dyang ditempuh bola setelah bergerak dengan kecepatan terminal dalam waktu tempuhnya tmempunyai kecepatan
9
2r2g b f
t
d
Dengan demikian waktu tempuhnya adalah
b f
Dengan mengukur kecepatan akhir bola yang radius dan rapat massa telah diketahui, maka viskositas fluida dapat ditentukan. Untuk memperoleh nilai viskositas fluida, Persamaan (9) diubah dalam bentuk
d
t
g
r
b f9
2
2
=k
(
b
f)
t
(10)
dengan
d g r k
9
2 2
(11)
Satuan viskositas fluida dalam sistem cgs adalah dyne det cm-2, yang biasa disebut dengan istilah poise di mana 1 poise sama dengan 1 dyne det cm-2. Viskositas dipengaruhi oleh perubahan suhu. Apabila suhu naik maka viskositas menjadi turun atau sebaliknya.
2.2. Mikrokontroler ATMega8535
Mikrokontroler merupakan keseluruhan sistem komputer yang dikemas menjadi sebuah chip di mana di dalamnya sudah terdapat Mikroprosesor, I/O, Memori bahkan ADC, berbeda dengan Mikroprosesor yang berfungsi sebagai pemroses data.[2]
Mikrokontroller AVR (Alf and Vegard’s Risc processor) memiliki arsitektur 8 bit, dimana semua instruksi dikemas dalam kode 16-bit dan sebagian besar instruksi dieksekusi dalam 1 siklus clock atau dikenal dengan teknologi RISC (Reduced Instruction Set Computing). Secara umum, AVR dapat dikelompokan ke dalam 4 kelas, yaitu keluarga AT90Sxx, keluarga ATMega dan AT86RFxx. Pada dasarnya yang membedakan masing-masing adalah kapasitas memori, peripheraldan fungsinya. Dari segi arsitektur dan instruksi yang digunakan, mereka bisa dikatakan hampir sama.
1. Memiliki ADC (Pengubah analog-ke-digital) internal dengan ketelitian 10 bit sebanyak 8 saluran.
2. Memiliki Unit interupsi (internal & eksternal)
3. Memiliki PWM (Pulse Wide Modulation) internal sebanyak 4 saluran. 4. Portal komunikasi serial (USART) dengan kecepatan maksimal 2,5
Mbps.
5. Enam pilihan mode sleep, untuk menghemat penggunaan daya listrik.
Secara garis besar, arsitektur mikrokontroler ATMEGA8535 terdiri dari :
32 saluran I/O (Port A, Port B, Port C, dan Port D)
10 bit 8 Channel ADC (Analog to Digital Converter)
4 channel PWM
6 Sleep Modes : Idle, ADC Noise Reduction, Power-save,
Power-down, Standby and Extended Standby
3 buah timer/counter
Analog comparator
Watchdog timer dengan osilator internal
512 byte SRAM
512 byte EEPROM
8 kb Flash memory dengan kemampuan Read While Write
Unit interupsi (internal & eksternal)
Port antarmuka SPI8535 “memory map”
Port USART untuk komunikasi serial dengan kecepatan
maksimal 2,5Mbps
4.5 sampai 5.5V operation, 0 sampai 16MHz
pemrograman tingkat tinggi seperti bahasa C, Java, atau Basic. Untuk melakukan pemindahan dari komputer ke dalam chip, dapat digunakan beberapa cara seperti menggunakan kabel JTAG atau menggunakan STNK buatan Atmel.
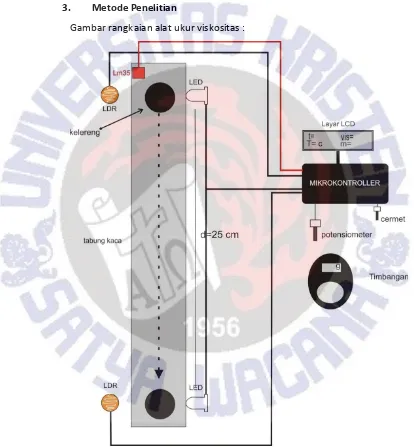
[image:8.612.102.516.185.632.2]3. Metode Penelitian
Gambar rangkaian alat ukur viskositas :
Gambar 2. Rangkaian alat ukur viskositas
Untuk lebih dari 1 kelereng dipilih massa dan volume kelereng yang tetap yaitu m=0.006 kg, r kelereng= 0.785cm, V kelereng= 2.025x10-6m3, jarak antara 2 LDR juga tetap yaitu 0.25 m. Untuk menimbang massa fluida digunakan wadah yang tetap juga dengan massa wadah 0.002 kg dan volume fluida yang diukur tetap yaitu sebesar 10 ml. Port ADC yang digunakan 4 buah yaitu:
1. ADC0 (port A0) cermet untuk kalibrator viskositas. 2. ADC1 (port A1) Sistem LDR pencatat waktu. 3. ADC2 (port A2) LM35 pengukur suhu.
4. ADC3 (port A3) Potensiometer untuk input massa fluida.
Port D2 dan port B7 untuk interupt, port B6 untuk LED atas, dan port B5 untuk LED bawah.
Proses pengukuran dirancang sebagai berikut. Mula-mula tabung diisi fluida dan sebagian ditimbang massanya pada wadah yang disediakan. Setelah alat dinyalakan, LED atas dan bawah dihidupkan atau dimatikan dengan cara tertentu untuk memperoleh batas tengah intensitas cahaya yang diterima LDR. Intensitas cahaya yang diterima LDR dimasukkan ke dalam port A1, yang kemudian akan dipakai untuk mengeluarkan status alat (lihat gambar flowchart cek LDR).
Ketika kelereng menutupi LED atas, maka mikrokontroler akan mengirimkan sinyal ke interup port D2 untuk menjalankan pencatat waktu. Ketika kelereng menutupi LED bawah mikrokontroler akan mengirimkan sinyal ke interup port D2 untuk menghentikan pencatat waktu. Dalam tahap ini waktu tempuh kelereng akan tersimpan dalam memori mikrokontroler. Namun waktu tempuh ini belum bersatuan detik, melainkan bilangan bulat tertentu yang harus dikalikan dengan suatu konstanta untuk memperoleh satuan detik. Parameter ini disebut timekal. Timekal dicari dengan mengukur waktu buka-tutup LED dan membandingkan dengan nilai yang disimpan oleh mikrokontroler, yaitu yang disebut COUNT. Jadi waktu yang ditempuh adalah COUNT x timekal.
0
.
002
255
3
ADC
m
fJadi massa fluida dimasukkan melalui port A3 dengan bantuan potensiometer. Untuk ini diperlukan kalibrasi massa. Karena ADC3 dapat bernilai 0 sampai 255 (yaitu dari tegangan 0 volt sampai Vcc) maka dipilih nilai tengah, dalam hal ini dipilih ADC3=123 untuk massa 0.011 kg sehingga diperoleh nilaiβsebesar 0.0183.
Yang terakhir, untuk mengatur nilai ukur viskositas agar sesuai dengan nilai acuan diperlukan faktor koreksi yaitu sebesar
255 0
127ADC
Dalam penelitian ini ε dipilih kecil yaitu sebesar 0.01, dan ADC0 diatur oleh cermet yang dimasukkan pada port A0. Jadi persamaan (11) dikoreksi menjadi
255
0
127
1
ADC
k
k
Jadi viskositas dalam mikrokontroler adalah
timekal COUNT V ADC ADCk b f
0.002 /
255 3 255
0 127
1
(12)
Satuannya adalah Pa.s, untuk mendapatkan nilai satuan dalam Poise harus dikalikan lagi dengan 10. Untuk suhu LM35 menggunakan persamaan
T
b
a
ADC
2
Nilai adan b diperoleh dari pengukuran 2 suhu yang berbeda. Dari hasil kalibrasi diperoleh nilai a danb, a=0.820513 b=16.15385.
4. Analisis Data
semakin tinggi suhu, nilai viskositas akan berkurang, jadi nilai viskositas oli SAE40 pada suhu 27.60C kurang dari 4.3 Poise.
Sedangkan pada suhu 40 0C massa menjadi 9g. Nilai viskositas oli mesran SAE40 dari hasil percobaan adalah 1.719 ± 0.07 P. Dari data resmi PERTAMINA, nilai viskositas oli Mesran SAE 40 pada suhu 400C adalah 1.159 P.
Dari sampel oli Mesran Super SAE 20W50, dengan massa 11 g/10ml pada suhu 26.6 0C diperoleh nilai η= 4.3 P ± 0.1.sedangkan dari hasil perhitungan manual nilai viskositas oli tersebut adalah 4.6 P. Dari percobaan SAE 20W50 pada suho 400C dengan massa 10 g/ 10ml diperoleh nilai η= 2.3±0.1 P. Dari perhitungan manual didapatkan nilai viskositas oli tersebut adalah 2.1102 P.
Dari percobaan dengan sampel minyak goreng Bimoli dengan massa 11g pada suhu 27.6 0C diperoleh η= 1.41 ± 0.03 P. Dari perhitungan manual didapatkan nilai viskositasnya adalah 1.52 P.
Dari data perbandingan hasil percobaan dengan data referensi ataupun dari data perhitungan manual, maka didapatkan nilai ralatrata-rata alat ukur viskositas ini adalah 6 %. Jadi ketepatan alat ukur viskositas dengan sensor LDR dan mikrokontroler ATMega8535 ini mencapai 94%.
5. Kesimpulan dan Saran
Pembuatan alat ukur viskositas fluida metode bola jatuh dengan menggunakan mikrokontroler ATMega 8535 dan sensor cahaya LDR dapat membantu mengukur nilai viskositas fluida dengan ketepatan ukur mencapai 94%. Sensor cahaya LDR bisa membantu otomatisasi penghitungan waktu tempuh bola jatuh pada metode ini.
Kedepannya alat ukur viskositas ini dapat dikembangkan sehingga dapat mengukur nilai viskositas semua fluida dengan ketelitian yang tinggi. Selain itu perangkat untuk tabung bisa dibuat lebih baik, sehingga tidak menimbulkan kesalahan pada saat mengukur.
juga perlu diperhatikan, yaitu mengenai dimensi kelereng dan massa jenisnya. Jadi kalau kita menggunakan banyak kelereng untuk pengukuran, semua kelereng harus sama, baik ukuran fisik maupun massa jenisnya. Penggunaan wadah untuk menimbang fluida bias diganti dengan wadah yang memiliki nilai ralat volume yang kecil.
6. Referensi
1. http://id.wikipedia.org/wiki/Mikrokontroler, 2.
http://www.forumsains.com/mikrokontroler-dan-robotika/mikrokontroler-atmega8535/msg7241/#msg7241 3.
http://duniaelektronika.blogspot.com/2007/09/mikrokontroler-atmega8535.html
4. http://npx21.blog.uns.ac.id/2010/07/17/atmega8535/
5. Budianto, Anwar. “Metode Penentuan Koefisiensi Kekentalan Zat Cair dengan menggunakan Regresi Linear Hukum Stokes”.Seminar Nasional IV SDM Teknologi Nuklir Yogyakarta. Agustus 2008. ISSN 1978-0176.
6. Mujiman. “Simulasi Pengukuran Nilai Viskositas Oli Mesran SAE 10-40 Dengan penampil LCD”. Telkomnika Vol. 6, No. 1. April 2008 : 49-56 7. Heryanto, M.A. dan Ir. Wisnu Adi P. “Pemrograman Bahasa C untuk
Lampiran
2. Flowchart Cek LDR
1. LOW = max ( LDR1 h, LDR2 h) ; HIGH = min ( LDR1 m, LDR2 m) ;
Level =
eger
LOW
HIGH
int
2
Jika ( abs ( LOW – HIGH ) > 10 ) maka status Ok
Delay 100
LDR 1h = ADC1
Delay 100
LED 2= Off
Delay 100
LDR1m = ADC1
Delay 100
LED 2 On
LED 1 OnLED = On
LDR2m= ADC1
Delay 100
LDR2 h= ADC1
Delay 100
LED 1= Off
Delay 100
LED 1= On
3. Tabel komponen elektenika
No Nama Komponen Jumlah
1 ATMega8535 1
2 LCD 1
3 LM35 1
4 LDR 2
5 LED Putih 2
6 Potensiometer 50KΩ 1
7 Cermet 50KΩ 1
8 Kapasitor 10μF 2
9 Kapasitor 22μF 6
10 Resistor 6
11 Aki 14
12 LED merah 1
4. Rangkaian Elektronika Pada ATMega8535
ATMega8535
LCD
Lm35
A0
A1
A2
A3
C0-C7
D2