MODUL 1 PEMODELAN Revie Marthensa (13213118)
Asisten: Rizky Indra Syafrian (13212049) Tanggal Percobaan: 23/02/2016 EL3215 – Praktikum Sistem Kendali
Laboratorium Sistem Kendali dan Komputer - Sekolah Teknik Elektro dan
Informatika ITB
Abstrak
Modul 1 terdiri dari percobaan-percobaan pengenalan komponen yang berada di dalam sistem MS-150 serta pencarian fungsi transfer dari sistem yang digunakan. Komponen yang digunakan di antaranya adalah power supply, attenuator, op-amp, PID, servo-amp, dan motor DC. Pencarian fungsi transfer sistem dilakukan dengan dua cara, yaitu dengan menghitung satu per satu parameter fisik sistem (resistansi motor, induktansi motor, tegangan tachogenerator, konstanta tacho, konstanta torsi, konstanta back-emf, koefisien gesek, momen inersia), serta dengan cara grafis menggunakan bantuan osiloskop. Pada akhirnya, diharapkan kedua fungsi transfer yang dicari dari kedua cara ini sama.
Kata kunci: MS-150, motor DC, fungsi transfer.
1. PENDAHULUAN
Modul pertama ini bertujuan untuk memahami pemodelan dalam sistem kendali motor DC. Untuk mencapai tujuan itu, praktikan diharapkan mampu untuk:
Memahami sistem dan komponen sistem MS-150.
Mengenali kegunaan dan karakteristik alat-alat praktikum MS-150.
Memahami model rangkaian motor DC secara umum.
Mendapatkan parameter-parameter model MS-150.
Mendapatkan fungsi transfer model MS-150.
Modul ini terdiri dari percobaan-percobaan untuk mengenal sistem MS-150 serta mencari fungsi transfer dari sistem tersebut.
2. STUDI PUSTAKA
2.1 MOTOR DC
Motor adalah mesin listrik yang berfungsi untuk mengubah energi listrik menjadi gerakan mekanik rotasional. Motor DC sendiri merupakan salah satu jenis motor yang menggunakan energi listrik arus searah atau
direct current untuk kemudian diubah
menjadi gerakan rotasional. Motor DC terdiri dari stator dan rotor. Stator adalah bagian yang tidak bergerak dan rotor adalah bagian yang berputar. Dari jenis komutasinya, motor DC dibedakan menjadi dua, yaitu motor DC tanpat sikat (brushless) dan motor DC degan sikat (brushed). Untuk praktikum system kendali modul ini digunakan motor DC dengan sikat.
Agar motor DC dapat dikendalikan dengan suatu pengendali tertentu, perlu diketahui karakteristik-karakteristik apa saja yang dimiliki oleh motor tersebut. Pemodelan merupakan salah satu proses untuk mengetahui model matematika dari suatu sistem yang akan dikendalikan (kendalian). Sebelum merancang pengendali motor, langkah pertama yang harus dilakukan adalah menurunkan persamaan model dinamika dari motor. Biasanya model tersebut dinyatakan dalam bentuk fungsi transfer (transfer function).
Secara umum, dalam domain Laplace, hubungan antara tegangan masukan motor Vm dengan putaran rotor ωm dinyatakan dalam :
ω
m(
s)
V
m(
s)
=
K
tJ
mL
ms
2+
(
J
mR
m+
D
mL
m)
s+R
mD
m+
K
mK
t Pada umunya, nilai Lm cukup kecil bila dibandingkan dengan Rm, sehingga fungsi transfer di atas dapat disederhanakan menjadi:ω
m(
s)
V
m(
s)
=
K
tR
mD
mJ
mD
ms+R
mD
m≡
K
τs+1
[1]2.2 MODULAR SERVO SYSTEM
MS-150
Modular Servo System MS-150 merupakan suatu sistem modular yang terdiri dari berbagai komponen, yaitu:
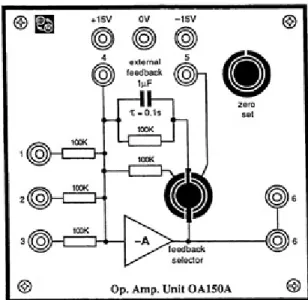
Unit Op-Amp (OU-150A)
Berupa rangkaian penguat operasional dengan konfigurasi inverting. Terdapat
feedback selector yang dapat membuat unit
ini berfungsi sebagai penjumlah, integrator penjumlah (summing integrator), atau rangkaian lain tergantung pada umpan balik yang dipasangkan.
Unit Attenuator (AU-150B)
Berupa 2 buah potensiometer putar 10K. Digunakan sebagai pengontrol tegangan (biasanya sebagai masukan acuan dalam sistem control pada motor), jika dihubungkan ke sumber tegangan atau sebagai pengontrol penguatan jika dihubungkan dengan unit amplifier (menggunakan potensio sebagai pembagi tegangan).
Unit Pre-Amp (PA-150C)
Memiliki 3 terminal input dan 2 terminal output. Jika Vin positif, maka terminal output atas akan memberikan tegangan positif sebesar Kamp x Vin, sementara terminal output bawah memberikan tegangan mendekati 0. Jika Vin negatif, hal sebaliknya terjadi.
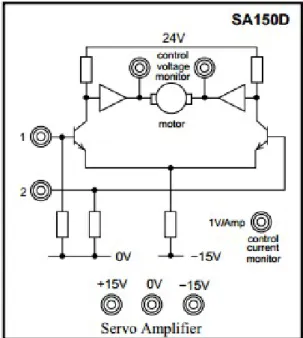
Servo Amplifier (SA-150D)
Merupakan alat yang mengatur arah dan besar putaran motor, tergantung tegangan masukan servo amplifier (terminal 1 dan 2). Terdapat 2 mode pengaturan motor, yaitu pengendali jangkar (armature-control) dan pengendali medan (field-control). Motor berputar jika salah satu terminal diberi tegangan positif, dan berputar ke arah yang berlawanan jika terminal lain yang diberi tegangan positif. Motor tidak berputar jika diberi tegangan negative.
Power Supply (PS-150E)
Unit ini menyediakan tegangan DC +15V dan -15V serta tegangan AC 22V.
Motor DC dan Tachogenerator (MT-150F)
Berupa motor DC dengan kumparan medan terpisah, memiliki perpanjangan sumbu putar utama yang dapat dipasangi rem magnetic atau lempengan inersia. Terdapat juga sumbu putar tambahan dengan kecepatan 1:30 kali kecepatan sumbu putar utama.
Potensiometer Input (IP-150H)
Berupa potensiometer putar 10K dilengkapi dengan skala yang menyatakan sudut putaran.
Potensiometer Output (OP-150K) Berupa potensiometer putar 10K dilengkapi dengan skala yang menyatakan sudut putaran.
Load Unit (berupa Rem Magnetik (eddy current break) dan Lempeng Inersia)
Terdiri dari lempengan inersia, lempeng aluminium tipis, dan rem magnetik. Efek pengereman timbul saat lempeng aluminium tipis berputar di celah magnet rem magnetik. Efek pengereman ini digunakan untuk mensimulasikan pembebanan pada motor. Besarnya pengereman tergantung pada posisi magnet.
Unit Kontroler PID (PID-150Y)
Terdiri dari 3 bagian utama, yaitu penguat inverting sebagai control proporsional, inverting integrator sebagai kontroler integral, dan inverting differensiator sebagai kontroler derivatif. [1]
3. HASIL DAN ANALISIS
3.1 PENGENALAN ALAT: UNIT
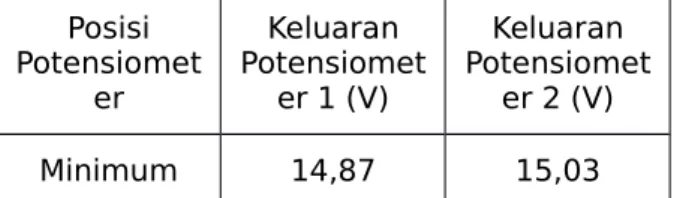
POWER SUPPLY DAN ATENUATOR Power supply dihubungkan ke atenuator. Pada atenuator, terdapat dua buah potensio meter, yaitu potensiometer atas (potensiometer 1) dan potensiometer bawah (potensiometer 2). Power supply memberikan tegangan 0 sampai +15 V. Tegangan keluaran atenuator adalah sebagai berikut.
Tabel 3-1 Data Pengenalan Power Supply dan Atenuator Posisi Potensiomet er Keluaran Potensiomet er 1 (V) Keluaran Potensiomet er 2 (V) Minimum 14,87 15,03
PS150
E AU150B SA150D MT150F
Tengah 7,61 8,21
Maksimum 0 0
Hasil pengukuran di atas dapat diplot menjadi kurva sebagai berikut.
0 1 2 3 4 0 5 10 15 20
Keluaran Potensiometer 1
Posisi Potensiometer Tegangan Keluaran (V)Gambar 3-1 Grafik Tegangan Keluaran Atenuator berdasarkan Posisi Potensiometer
1
Kel uaran Pot ensiom eter 2Posisi Po te nsiom e te r Gambar 3-2 Grafik Tegangan Keluaran Atenuator berdasarkan Posisi Potensiometer
2
Keterangan posisi: 1 = minimum, 2 = tengah, 3 = maksimum.
Dari kedua kurva di atas, terlihat bahwa tegangan keluaran potensiometer cukup linear terhadap posisi dari potensiometer itu sendiri.
3.2 PENGENALAN ALAT:
MENJALANKAN MOTOR
Pada percobaan ini, sistem yang digunakan adalah sebagai berikut.
Gambar 3-3 Susunan Sistem pada Percobaan Menjalankan Motor
Pada percobaan ini, potensiometer 1 pada atenuator diberi tegangan 0 dan +15 V, sedangkan potensiometer 2 diberi tegangan -15 dan 0 V.
Fenomena yang terjadi saat percobaan ini adalah sebagai berikut.
Ketika terminal 1 servo amplifier dihubungkan dengan keluaran potensiometer 1 (tegangan positif), motor mulai berputar berlawanan arah jarum jam ketika tegangan pada terminal 1 mencapai 4,67 V.
Ketika terminal 2 servo amplifier dihubungkan dengan keluaran potensiometer 1 (tegangan positif), motor mulai berputar searah jarum jam ketika tegangan pada terminal 2 mencapai 4,832 V.
Ketika terminal 1 dan 2 servo amplifier dihubungkan dengan keluaran potensiometer 2 (tegangan negatif), motor tidak berputar meskipun nilai mutlak tegangan terminal terus diperbesar.
Dari hasil di atas, dapat disimpulkan bahwa: Pemberian tegangan positif yang
cukup pada terminal 1 servo amplifier akan membuat motor berputar berlawanan arah jarum jam.
Pemberian tegangan positif yang cukup pada terminal 2 servo amplifier akan membuat motor berputar searah jarum jam.
Pemberian tegangan negatif pada terminal 1 atau 2 servo amplifier tidak akan membuat motor berputar.
Fenomena di atas dapat dijelaskan dengan melihat rangakaian dari servo amplifier SA150D.
PS150
E AU150B OU150A SA150D MT150F Pada rangakaian di atas, terlihat jelas bahwa terdapat dua buah transistor BJT, satu buah terhubung ke terminal 1 dan satu buah lainnya terhubung ke terminal 2. Dengan susunan demikian, dapat kita simpulkan bahwa bila terminal 1 atau 2 diberi tegangan positif yang menyebabkan VBE lebih besar dari 0,7 V (BJT aktif), maka motor akan teraliri arus. Namun, arah arus dari BJT terminal 1 dan BJT terminal 2 saling berkebalikan. Hal inilah yang menyebabkan mengapa arah putaran motor menjadi berlawanan ketika tegangan input positif dimasukan ke terminal yang berbeda.
Sebaliknya, bila terminal 1 atau 2 diberi tegangan negatif, maka BJT akan berada dalam keadaan cut-off. Dengan demikian, arus tidak akan mengalir ke motor dan motor tidak akan berputar meskipun nilai mutlak tegangan masukannya terus diperbesar. Dari hasil di atas pula, kita dapat mengetahui bahwa untuk mulai membuat motor berputar diperlukan tegangan minimum, yaitu sebesar kurang lebih 4,7 V. Hal ini disebabkan oleh adanya momen inersia dan gaya gesek rotasi pada motor. Dengan demikian, diperlukan suatu torsi minimum untuk mulai membuat motor bergerak, dengan kata lain dibutuhkan arus minimum yang masuk ke motor.
3.3 PENGENALAN ALAT: UNIT OP
-AMP
Pada percobaan ini, sistem yang digunakan adalah sebagai berikut.
Gambar 3-5 Susunan Sistem saat Percobaan Unit Op-amp
Berbeda dengan percobaan sebelumnya, pada percobaan ini tegangan keluaran atenuator dimasukan terlebih dahulu ke op-amp, kemudian keluaran op-amp dihubungkan ke terminal 1 servo amplifier. Hasil yang diperoleh adalah sebagai berikut.
Ketika op-amp diberi masukan tegangan positif, motor tidak berputar.
Ketika op-amp diberi masukan tegangan negatif -4,36 V, motor berputar berlawanan arah jarum jam. Ketika op-amp diberi masukan
tegangan positif dan negatif dengan tegangan negatif yang cukup
mengimbangi tegangan positifnya, motor berhenti berputar
Gambar 3-6 Rangkaian Unit Op-Amp Hasil pertama dan kedua dapat diperoleh karena op-amp yang digunakan adalah inverter. Hal ini dibuktikan dengan membandingkan polaritas tegangan masukan dan keluaran dari op-amp. Dengan demikian, ketika tegangan positif masuk ke op-amp, servo amplifier akan menerima masukan tegangan negatif. Sesuai dengan percobaan sebelumnya, tegangan negatif pada terminal servo amplifier tidak akan menyebabkan motor bergerak. Sebaliknya, ketika op-amp diberi tegangan negatif, maka motor berputar berlawanan arah jarum jam. Hal ini terjadi karena keluaran op-amp berupa tegangan positif, dan tegangan positif pada terminal 1 akan menyebabkan motor berputar berlawanan arah jarum jam.
Hasil ketiga dapat diperoleh karena selain inverter, op-amp yang digunakan juga merupakan summer. Dengan demikian, tegangan negatif dan positifnya akan dijumlahkan. Efek dari penjumlahan ini adalah tegangan masukan inverter yang nilai mutlaknya semakin mendekati nol. Dengan kata lain, tegangan yang masuk ke terminal 1 servo amplifier juga mengecil dan akan membuat motor berhenti berputar.
Dari hasil yang ketiga, dapat kita simpulkan bahwa kecepatan putar motor dapat dikendalikan menggunakan dua buah knop, satu untuk mempercepat putaran dan satu menjadi semacam knop pengereman.
PS150
E AU150B PID150Y SA150D MT150F 3.4 PENGENALAN ALAT:
TACHOGENERATOR
Hasil percobaan ini adalah sebagai berikut. Tabel 3-2 Hasil Percobaan Tachogenerator Vm (V) Vtcg (V) t (s) (rad/s)ω2 (rad/s)ω1 6 4,55 31,86 5,916 177,48 6,47 5,5 26,25 7,18 215,4 7 6,6 22,33 8,44 253,2 Keterangan:
Vm adalah tegangan sumber. Vtcg adalah tegangan pada motor.
t adalah waktu yang diperlukan sumbu tambahan untuk berputar 30 kali.
ω2 adalah kecepatan sudut sumbu tambahan. ω1 adalah kecepatan sudut sumbu utama. Dari hasil di atas, dapat diperoleh nilai Ktcg menggunakan persamaan yang ada pada modul.
K
tcg=
V
tcg/
ω
1K
tcg 1=0,0256 Vs/rad
K
tcg 2=0,0255 Vs/rad
K
tcg 3=0,0260 Vs/rad
K
tcg avg=
0,0257Vs /rad
Dengan demikian, diperoleh hubungan antara Vtcg dan kecepatan sudut ω, yaitu:
V
tcg=0,0257 ω
13.5 PENGENALAN ALAT: PID
Hubungan sistem pada percobaan ini adalah sebagai berikut.
Gambar 3-7 Susunan Sistem pada Percobaan PID
PID terdiri dari proposional, integral, dan derivatif. Pada percobaan ini, terdapat tiga kombinasi komponen yang digunakan, yaitu proporsional saja, proporsional integral, dan proporsional derivatif.
Hasil yang diperoleh adalah sebagai berikut. Mode pertama adalah ketika
komponen yang digunakan hanya proporsional penguatan 1 kali. Nilai hambatan potensiometer diubah-ubah sehingga tegangan masukan servo amplifier naik dari kecil menjadi besar. Dengan perubahan ini, kecepatan putar motor meningkat pula secara linear mengikuti tegangan masukannya.
Mode kedua adalah ketika komponen yang digunakan adalah proporsional 1x integral 0,4 s. Ketika tegangan masukan servo-amp dibuat konstan 5 V, kecepatan motor lama kelamaan makin cepat. Selanjutnya, ketika tegangan masukan servo-amp dibuat konstan 0 V, kecepatan motor justru menjadi konstan. Motor baru berhenti ketika power supply dimatikan.
Mode ketiga adalah ketika komponen yang digunakan adalah proporsional 1x dan derivatif 40 ms. Ketika tegangan masukan servo-amp sebesar 5 V, motor awalnya diam, kemudian perlahan berputar semakin cepat sampai akhirnya dalam kondisi steady atau tunak. Namun, laju kenaikan kecepatan dari berhenti sampai ke steady lebih lambat dibandingkan pada mode 1.
Hasil pertama adalah hasil yang masuk akal karena kecepatan putar motor berbanding lurus dan linear terhadap tegangan masukan servo-amp.
Hasil kedua diperoleh demikian karena adalah komponen integral yang digunakan. Ketika tegangan konstan 5 V, sebetulnya sinyal ini berupa sinyal step. Ketika diintegral, sinyal ini akan berubah menjadi sinyal ramp. Atau dengan kata lain, tegangan masukan servo-amp lama kelamaan menjadi semakin besar. Setelah itu, ketika tegangan masukan servo-amp dibuat nol, maka kecepatan motor menjadi konstan. Hal ini terjadi karena integral dari nol merupakan sebuah konstanta tertentu, dalam hal ini nilai konstanta adalah kecepatan sudut akhir dari motor sesaat sebelum tegangan masukan servo-amp dibuat konstan nol.
Hasil ketiga diperoleh karena ketika respon motor diturunkan (derivatif), maka kurva respon akan menjadi lebih landai dari pada kurva respon sebelum diturunkan. Kelandaian ini menyebabkan laju kenaikan kecepatan rotasi motor menjadi lebih lambat ketika input tegangan diperbesar.
PS150
E AU150B OU150A SA150D MT150F 3.6 PENENTUAN FUNGSI TRANSFER
MELALUI PENGUKURAN FISIK Hubungan sistem pada percobaan ini adalah sebagai berikut.
Gambar 3-8 Susunan Sistem pada Percobaan Penentuan Fungsi Transfer melalui
Pengukuran Fisik
Penentuan Resistansi Motor
Pada percobaan ini, power supply mencatu arus DC dan sumbu utama motor ditahan menggunakan tangan agak tidak berotasi saat diberi tegangan.
Hasil percobaan yang diperoleh adalah sebagai berikut.
Tabel 3-3 Hasil Percobaan Resistansi Motor
Vm (V) Im (A) Rm (Ω)
5,4 1,1 4,91
6,84 1,5 4,56
7,48 1,7 4,4
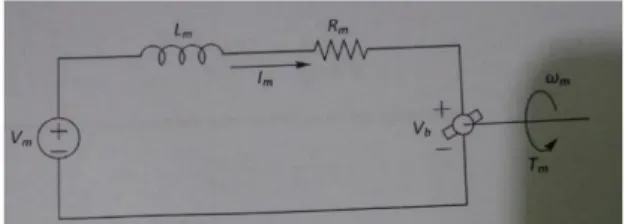
Hasil percobaan ini dapat dijelaskan melalui rangkaian pengganti motor.
Gambar 3-9 Rangkaian Pengganti Motor Rangkaian pengganti motor terdiri dari komponen tegangan Vm, arus Im, resistansi Rm, induktor Lm, dan tegangan tachogenerator Vtcg. Bila arus yang diberikan adalah DC, untuk waktu yang lama induktor bias dianggap short karena sudah dalam keadaan tunak. Selain itu, dengan ditahannya putaran motor menggunakan tangan, ini berarti tegangan pada tachogenerator (Vtcg) juga bernilai nol. Dengan demikian, bila diterapkan KVL pada loop rangkaian, kita dapat memperoleh:
V
m=
I
mR
mR
m=
V
mI
mDengan demikian, Rm dapat dicari dengan persamaan di atas. Pada percobaan, digunakan tiga variasi Vm sehingga terdapat pula 3 variasi Im. Idealnya, nilai Rm dari setiap variasi akan sama. Namun, pada percobaan terdapat perbedaan-perbedaan kecil yang wajar. Ketidakidealan ini dapat disebabkan oleh hasil pengukuran multimeter dan amperemeter pada power supply yang tidak dapat dipercaya 100% kebenarannya. Dengan demikian, ketiga nilai di atas dirata-ratakan.
R
m avg=
1
3
(4,91+4,56 +4,4 )=4,623 Ω
Penentuan Induktansi MotorPada percobaan ini, power supply mencatu arus AC dan sumbu utama tetap ditahan agar tidak berotasi saat diberi input tegangan. Hasil percobaan adalah sebagai berikut.
Tabel 3-4 Hasil Percobaan Induktansi Motor
Vm (V) Im (A) Zm (Ω)
6,5 0,7 9,285
7,56 0,8 9,45
8,67 0,9 9,633
Penjelasan hasil percobaan ini mirip dengan percobaan sebelumnya. Perbedaan terjadi pada jenis arus input yang digunakan. Pada percobaan ini, digunakan arus AC agar induktor memiliki reaktansi dan tidak bias dianggap short. Karena kita telah mengetahui resistansi dari motor, maka kita dapat menghitung reaktansi dari induktor sebagai berikut.
Z
m avg=
1
3
(9,285+9,45+9,633)=9,456 Ω
Z
L=
√
Z
m2−
R
2m=8,248 Ω
Dengan menggunakan frekuensi sinyal 50 Hz, maka induktansi dapat kita hitung sebagai berikut.
L=
Z
L2 πf
=0,0263 H
Pada percobaan ini, power supply kembali mencatu arus DC dan sumbu utama motor dibiarkan bebas berotasi.
Hasil percobaan adalah sebagai berikut. Tabel 3-5 Hasil Percobaan Konstanta
Back-emf Vm (V) (A)Im (V)Vb Vtcg(V) (rad/sω ) Km (Vs/rad) 6 0,8 2,3 4,55 177,0 4 0,0129 6,4 7 0,8 2,77 5,5 214 0,0129 7 0,8 3,3 6,6 256,8 1 0,0128 Km merupakan konstanta back-emf yang ingin dicari. Ini merupakan factor pengali yang mentranformasikan nilai ω menjadi Vb untuk dijadikan feedback ke input.
Vb merupakan tegangan feedback yang berikan sistem. Nilai Vb diperoleh dengan persamaan berikut.
V
b=
V
m−
I
mR
mNilai ω diperoleh dengan membagi Vtcg dengan Ktcg yang telah diperoleh dari percobaan pengenalan tachogenerator. Dengan dua nilai di atas yang diketahui, maka nilai Km dapat dihitung karena Km adalah factor pengali untuk mengubah ω menjadi tegangan feedback.
K
m=
V
bω
Diambil nilai rata-rata dari ketiga Km di atas.
K
mavg=
1
3
(0,0129+0,0129+0,0128)=0,01287 Vs/rad
Nilai Km di atas menunjukan bahwa Km adalah suatu konstanta yang nilainya sangatlah kecil bila dibandingkan dengan nilai-nilai parameter rangkaian yang lain. Dengan demikian, biasanya nilai Km diabaikan di dalam mencari fungsi transfer sistem motor. Hal ini pula yang dilakukan dalam proses pengubahan dari persamaan (1.1) ke persamaan (1.2) pada modul.
Penentuan Konstanta Torsi
Untuk mencari konstanta torsi (Kt), kita menggunakan analisis kekekalan energy, maka diperoleh perhitungan sebagai berikut.
P
mekanis=
P
elektris−
P
lossTω=I
mK
tω=V
mI
m−
I
m2R
mK
t=
V
m−
I
mR
mω
Dari percobaan sebelumnya, telah kita ketahui bahwa:
K
m=
V
bω
=
V
m−
I
mR
mω
Jadi:K
t=
K
mDengan demikian konstanta torsi diperoleh.
K
t=0,01287 Vs/rad
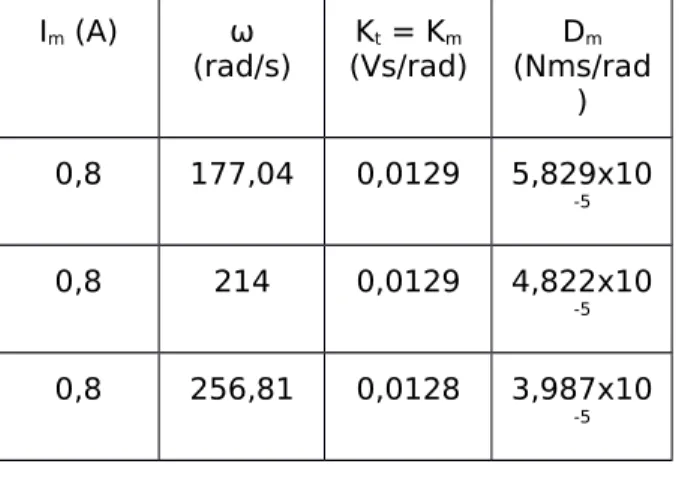
Penentuan Koefisien Gesekan
Dari mekanika, telah kita ketahui bahwa:
T =J
mdω
dt
+
D
mω
Karena pada percobaan ini kecepatan sudut yang digunakan selalu konstan, maka:
T =D
mω
Jadi:D
m=
K
tI
mω
Dengan menggunakan persamaan di atas, kita dapat memperoleh nilai Dm.
Tabel 3-6 Hasil Percobaan Konstanta Torsi
Im (A) ω
(rad/s) (Vs/rad)Kt = Km (Nms/radDm ) 0,8 177,04 0,0129 5,829x10 -5 0,8 214 0,0129 4,822x10 -5 0,8 256,81 0,0128 3,987x10 -5 Rata-rata Dm adalah:
D
mavg=
1
3
(5,829+4,822+3,987) ×10
−5
=4,879 ×10
−5Nms/rad
Penentuan Momen Inersia
Untuk menentukan momen inersia, maka diperlukan data konstanta waktu dari respon transien sistem. Dengan menggunakan bantuan osiloskop, maka diperoleh nilai konstanta waktu. Motor diberi input tegangan konstan. Dengan diberikannya tegangan konstan, maka respon kecepatan sudut motor dalam domain waktu adalah sebagai berikut.
ω=ω
max(
1−e
−t
τ
)
Dengan mengisi t = τ, maka:
ω=ω
max(
1−e
−1
)
=0,63 ω
maxDari persamaan di atas, dapat kita ketahui bahwa konstanta waktu adalah waktu di mana respon kecepatan sudut motor bernilai 63% dari kecepatan sudutnya saat sudah maksimum (tunak). Dari osiloskop, diperoleh bahwa nilai konstanta waktu adalah:
τ =0,97 s
Dengan menggunakan persamaan (1.2) dan (1.3) pada modul, diperoleh:
J
m=
D
mτ=4,732×10
−5
kg m
2Penentuan Fungsi Transfer Berdasarkan Parameter Fisik
Dengan menggunakan persamaan (1.2) dan (1.3), diperoleh fungsi transfer motor adalah sebagai berikut.
ω
m(
s)
V
m(
s)
=
K
tR
mD
mJ
mD
ms +1
=
0.01287
4,623× 4,879 ×10
−54,732 ×10
−54,879 ×10
−5s+1
ω
m(
s)
V
m(
s)
=
57,06
0,97 s+1
3.7 PENENTUAN FUNGSI TRANSFER SECARA GRAFIS
Penentuan fungsi transfer secara grafis dilakukan dengan menentukan nilai K dan τ pada persamaan:
ω
m(
s)
V
m(
s)
=
K
τs+1
Pada modul, terdapat kesalahan persamaan untuk mencari K. Seharusnya, K dapat dicari sebagai berikut (tugas pendahuluan nomor 3).
V
tcg=
K
tcgK
tV
sR
mD
mDengan mengganti Vtcg dengan Δu dan Vs dengan Δy, maka:
∆ y=
K
tcgK
t∆ u
R
mD
mTelah kita ketahui bahwa:
K=
K
tR
mD
m Maka:K=
∆ y
∆ u K
tcg=
4,2
6,23× 0,0257
=26,23
Dari percobaan sebelumnya (penentuan momen inersia), telah diperoleh nilai konstanta waktu sebesar 0,97 sekon. Jadi fungsi transfer adalah:
ω
m(
s)
V
m(
s)
=
26,23
0,97 s+1
Pembahasan Fungsi Transfer
Hasil di atas menunjukan adanya perbedaan antara fungsi transfer yang terbentuk dari parameter fisik dan dari grafis. Perbedaan ini disebabkan oleh beberapa hal.
Pertama, sensitivitas amperemeter yang ada pada power supply tidak dapat dipastikan tingkat kebaikannya. Hal ini terlihat dari hasl pengukuran arus Im pada percobaan konstanta back-emf yang nilainya selalu 0,8 A ketika tegangan sumber diubah-ubah. Kedua, pengukuran kecepatan sudut motor sangat rentan terhadap kesalahan karena pengukuran waktu menggunakan stopwatch tidak mungkin 100% tepat. Pasti terdapat delay saat tangan pengamat memulai stopwatch dan menghentikan stopwatch. Ketiga, perbandingan jumlah putaran sumbu tambahan dan sumbu utama motor tidak bisa dipastikan 1:30. Bila perbandingan ini tidak terpenuhi, maka seluruh perhitungan kecepatan sudut juga tidak tepat. Namun, hal ini belum bisa dipastikan.
Keempat, Vtcg merupakan GGL yang diperoleh dari perputaran sumbu motor. Untuk menghasilkan GGL berupa Vtcg, tentunya akan ada rugi-rugi yang terjadi
pada kumparan. Hal ini juga dapat menyebabkan perbedaan fungsi transfer dari perhitungan parameter fisik dan dari grafis.
4. KESIMPULAN
Kesimpulan dari modul ini adalah sebagai berikut.
Sistem MS-150 terdiri dari beberapa komponen, yaitu power supply, atenuator, op-amp, PID, servo-amp, dan motor.
Setiap komponen memiliki fungsinya masing-masing. Power supply sebagai sumber energi. Atenuator sebagai pengatur nilai tegangan. Op-amp sebagai inverter. PID sebagai kontroler kecepatan motor. Servo-amp sebagai terminal sebelum arus masuk ke motor. Motor sebagai beban dan pengkonsumsi energi.
Nilai konstanta Tachogenerator Ktcg = 0,0257 Vs/rad.
Nilai resistansi motor Rm = 4,623 Ω. Nilai induktansi motor Lm = 0,0263 H. Nilai konstanta back-emf Km =
0,01287 Vs/rad.
Nilai konstanta torsi Kt = 0,01287 Vs/rad.
Nilai koefisien gesekan Dm = 4,879x10-5 kgm2/s.
Momen inersia Jm = 4,732 x10-5 kg m2. Fungsi transfer sistem yang diperoleh dari perhitungan parameter fisik adalah:
ω
m(
s)
V
m(
s)
=
57,06
0,97 s+1
Fungsi transfer sistem yang diperoleh dari perhitungan parameter fisik adalah:
ω
m(
s)
V
m(
s)
=
26,23
0,97 s+1
DAFTAR PUSTAKA[1] Nugroho, Sebastian A., Arief S. Rohman, dan Pranoto H. Rusmin.
Modul Praktikum Sistem Kendali.