i
(ELECTRIC MOTORCYCLE)
Disusun oleh:
ENDAR ADITRIA KURNIAWAN 07/251429/NT/12026
PROGRAM DIPLOMA TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS GADJAH MADA
YOGYAKARTA
ii
LAPORAN PROYEK AKHIR
SEPEDA MOTOR LISTRIK
(ELECTRIC MOTORCYCLE)
Diajukan Sebagai Salah Satu Syarat
Kelulusan di Program Diploma Teknik Elektro Fakultas Teknik Universitas Gadjah Mada
Disusun oleh:
ENDAR ADITRIA KURNIAWAN 07/251429/NT/12026
PROGRAM DIPLOMA TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS GADJAH MADA
YOGYAKARTA
iii
LEMBAR PENGESAHAN
SEPEDA MOTOR LISTRIK
(ELECTRIC MOTORCYCLE)
Disusun oleh:
ENDAR ADITRIA KURNIAWAN 07/251429/NT/12026
Diajukan Sebagai Salah Satu Syarat
Kelulusan di Program Diploma Teknik Elektro Fakultas Teknik Universitas Gadjah Mada
Diperiksa dan Disetujui :
Mengetahui:
Ketua Program Diploma Teknik Elektro FT – UGM
Ir. Lukman Subekti, M.T NIP. 19210301993031002
Dosen Pembimbing
Ir. Lukman Subekti, M.T NIP. 19210301993031002
iv
LEMBAR PENGESAHAN
SEPEDA MOTOR LISTRIK
(ELECTRIC MOTORCYCLE)
Telah diuji dan dipertahankan di hadapan Dewan Penguji Serta dinyatakan Lulus pada:
Hari : Jumat Tanggal : 25 Juni 2010 Pukul : 13.30
Tempat : Ruang 101 Program Diploma
Teknik Elektro Universitas Gadjah Mada
1. Ketua Penguji
Ir. Y. Wahyo Setiyono, M.T. 195807091989031004
2. Sekertaris Penguji
Ir. Sri Lestari, M.T. 195908281986022001 3. Penguji Utama
Hidayat Nur Isnianto, S.T. 197305282002121001
4. Anggota
Ir. Rizal 131766568
Allah Subhanahu Wata’ala beserta rosul-Nya,
Ayah dan Bundaku sebagai sumber motivasi saya, pendidik saya, yang telah membesarkan dan mendidik saya dari saya lahir hingga sampai seperti ini untuk bersifat terbuka, kreatif, berani dan bijaksana, yang memiliki peran yang sangat penting dan tak terhingga, sehingga rasanya ucapan terimakasih ini tidaklah cukup untuk menggambarkan wujud penghargaan saya atas segala limpahan cinta dan kasih sayangnya yang tak terbatas.
Saudara sekandungku Mas Iwan dan Mbak Mira serta seluruh keluargaBesarku yang telah memberikan dukungannya.
Saudara-saudaraku se-Iman yang selalu Berjuang bersama-Nya
Sesungguhnya shalatku, ibadahku, hidupku, dan matiku hanya untuk Allah,
Tuhan semesta alam (Q.S. Al An’am: 162).
Untuk mencapai kesuksesan, kita jangan hanya bertindak, tapi juga perlu
bermimpi, jangan hanya berencana, tapi juga perlu untuk percaya.
To accomplish great things, we must not only act, but also dream; not only plan, but
also believe.
~ Anatole France
Bakat yang kita miliki adalah hadiah dari Tuhan untuk kita… Apa yang dapat
kita hasilkan dari bakat tersebut adalah hadiah dari kita untuk Tuhan.
Our talents are the gift that God gives to us… What we make of our talents is our
gift back to God.
vi
Segala puji dan syukur kepada dari suara-suara hati yang bersifat mulia, sumber dari kehidupan, sumber ilmu pengetahuan, sumber segala kebenaran, penabur cahaya ilham, Pilar nalar kebenaran dan kebaikan yang terindah, Allah Subhanahu Wa Ta’ala yang telah melimpahkan rahmat, berkat, hidayah serta kekuatannya sehingga penulis dapat menyelesaikan Proyek Akhir dan penyusunan laporan dengan judul “Sepeda Motor Listrik (Electric Motorcycle) ”.
Laporan Proyek Akhir ini disusun untuk memenuhi salah satu tugas mata kuliah wajib di Program Diploma Teknik Elektro serta disusun untuk memenuhi salah satu syarat untuk memperoleh sebutan Ahli Madya pada Program Diploma Teknik Elektro Fakultas Teknik, Universitas Gadjah Mada Jogjakarta.
Banyak pihak yang telah membantu penulis, baik berupa material maupun spiritual dalam menyelesaikan Proyek Akhir ini, oleh karena itu pada kesempatan kali ini penulis ingin menyampaikan penghargaan dan ucapan terimakasih yang tak terhingga kepada:
1. bapak Ir Lukman Subekti, MT., Selaku Ketua Program Diploma Teknik Elektro Fakultas Teknik Universitas Gadjah Mada, serta sebagai dosen
vii
2. segenap dosen di lingkungan Program Diploma Teknik Elektro yang telah memberikan banyak ilmunya selama penulis melaksanakan kuliah,
3. seluruh staf di lingkungan Program Diploma Teknik Elektro yang telah membantu dan memberi kemudahan,
4. ayah dan bundaku yang tercinta dan tersayang serta semua keluargaku: Mbah Kurnia, Mas Iwan, Mba Mira, Titis, QQ, Doni, Mastur dan Mba Beti yang telah memberikan bantuan dan dukungan baik material maupun spiritual,
5. teman-teman penulis: Green House Camp (Mas Ibnu, Nasyir, Thom, Bandung, Tiok, Ari), S-Mut7 (Doody Cool, Danang, Te), Dieng Cyber (Pak Aryo, Saprol, Sidoel, Indra,Teo), Ridwan, Wanda, Nosha, Ratih, Ina, Rika, Novi, Perly, Sasa, Rian Tusad,
6. Semua pihak yang telah membantu penyusun dalam penyusunan dan pembuatan Proyek Akhir yang tidak dapat disebutkan satu per satu, semoga Tuhan berkenan memberikan balasan yang sepadan atas bantuan yang telah diberikan.
viii
Akhir kata, penulis berharap semoga laporan ini dapat menjadi sumbangan yang berarti dan bermanfaat bagi perkembangan ilmu pengetahuan dan dapat dipergunakan sebagai bahan pengetahuan bagi yang memerlukan.
Jogjakarta, Juni 2010
ix HALAMAN JUDUL………..………i LEMBAR PENGESAHAN………..iii HALAMAN PERSEMBAHAN………....v MOTTO ………...vi PRAKATA………….……….vii DAFTAR ISI………...ix
DAFTAR TABEL… ……….…….xii
DAFTAR GAMBAR ………..………...xiii
BAB I PENDAHULUAN……….1
1.1 Latar Belakang………....1
1.2 Maksud dan Tujuan…..………...3
1.3 Permasalahan……….……….3
1.4 Batasan Masalah……….………..………...4
1.5 Metode Pengumpulan Data……….………4
x
2.1 Tinjauan Umum ……….7
2.1.1 Arah Arus Listrik……….7
2.1.2 Hukum Ohm………8
2.1.3 Arus Searah dan Arus Bolak-balik………..8
2.2 Accumulator (Aki)………..9
2.3 Motor Listrik………..11
2.3.1 Cara Kerja Motor Listrik………12
2.3.2 Jenis-jenis Motor Listrik……….13
2.3.3 Mesin Arus Searah………..14
BAB III PERANCANGAN ALAT……….20
3.1 Diagram Sistem Keseluruhan……….20
3.2 Rangkaian Charger……….21
3.2.1 Transformator……….21
xi
3.5 Watak Motor DC………32
3.6 Sistem Mekanik………..33
BAB IV HASIL PENGUJIAN DAN PEMBAHASAN………..35
4.1 Pengujian Rangkaian Driver Motor DC……….36
4.2 Pengujian Kecepatan………..37
4.2.1 Pengujian Kecepatan Putar Motor DC………...37
4.2.2 Penghitungan Kecepatan Sepeda Motor Listrik……….38
4.3 Pengujian Pengisian Baterai………...44
4.4 Jarak dan Waktu Tempuh Sepeda Motor Listrik………45
4.5 Pembahasan………46
BAB V PENUTUP………..54
5.1 Kesimpulan……….54
5.2 Saran………...54
xii
4.1 Hasil Pengujian Rangkaian Driver Motor DC………...37
4.2 Putaran Pulley Motor DC………..38
4.3 Kecepatan Laju Sepeda Motor Listrik………..44
4.4 Waktu Pengisian Baterai sampai Penuh ………...45
4.5 Jarak dan Waktu Tempuh Sepeda Motor Listik………...46
4.6 Perbandingan Jarak Tempuh……….50
xiii
2.1 Bagan Klasifikasi Motor Listrik………13
2.2 Karakteristik Motor DC Shunt………..17
2.3 Karakteristik Motor DC Seri……….18
2.4 Karakteristik Motor DC Kompon……….19
3.1 Diagram Sistem Keseluruhan………20
3.2 Rangkaian Charger………21
3.3 Transformator 10 Ampere……….23
3.4 Kurva Dioda………..24
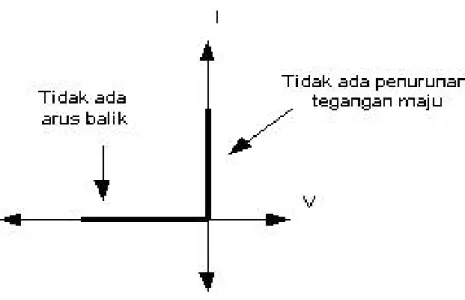
3.5 Kurva Dioda Ideal……….25
3.6 Fisik Dioda Bridge………26
3.7 Dioda Bridge yang Digunakan……….26
3.8 Siklus Tegangan DC……….27
3.9 Grafik Sinyal Penyearah Gelombang Penuh………28
xiv
3.13 Rangkaian PWM………..30
3.14 Kurva Daya dan Kurva Torsi atau Kecepatan Motor DC………33
3.15 Sketsa Sistem Mekanik………34
4.1 Hasil Pembuatan Alat………35
4.2 Diagram Blok Pengujian Rangkaian Driver Motor DC………36
4.3 Grafik Hubungan Tingkat Kecepatan dengan Jarak yang Ditempuh………….50
4.4 Grafik Hubungan Tingkat Kecepatan dengan Kecepatan Sepeda Motor Listrik berbeban dan tanpa beban………53
BAB I PENDAHULUAN
1.1. Latar Belakang
Ketergantungan terhadap bahan bakar fosil setidaknya memiliki tiga ancaman serius, yakni: (1) menipisnya cadangan minyak bumi yang diketahui, (2) kenaikan/ketidakstabilan harga akibat laju permintaan yang lebih besar dari
produksi minyak, dan (3) polusi gas rumah kaca (terutama CO2) akibat
pembakaran bahan bakar fosil. Kadar CO2 saat ini disebut sebagai yang
tertinggi selama 125,000 tahun belakangan. Bila ilmuwan masih memperdebatkan besarnya cadangan minyak yang masih bisa dieksplorasi, efek buruk CO2 terhadap pemanasan global telah disepakati hampir oleh semua kalangan. Hal ini menimbulkan ancaman serius bagi kehidupan makhluk hidup di muka bumi. Oleh karena itu, pengembangan dan implementasi bahan bakar terbarukan yang ramah lingkungan perlu mendapatkan perhatian serius dari berbagai negara.
Indonesia sesungguhnya memiliki potensi sumber energi terbarukan dalam jumlah besar. Beberapa diantaranya bisa segera diterapkan di tanah air, seperti: bioethanol sebagai pengganti bensin, biodiesel untuk pengganti solar, tenaga panas bumi, mikrohidro, tenaga surya, tenaga angin, tenaga baterai (accumulator), bahkan sampah/limbah pun bisa digunakan untuk membangkitkan listrik. Hampir semua sumber energi tersebut sudah dicoba diterapkan dalam skala kecil di tanah air. Momentum krisis bahan bakar
minyak (BBM) saat ini merupakan waktu yang tepat untuk menata dan menerapkan dengan serius berbagai potensi tersebut. Meski saat ini sangat sulit untuk melakukan substitusi total terhadap bahan bakar fosil, namun implementasi sumber energi terbarukan sangat penting untuk segera dimulai. Salah satunya sumber energi dengan reaksi kimia yaitu Accumulator (Aki).
Aki adalah jenis baterai yang banyak digunakan untuk kendaraan bermotor. Aki menjadi pilihan praktis karena dapat menghasilkan listrik yang cukup besar dan dapat diisi kembali. Aki berasal dari kata accumulator atau biasa disingkat accu. Aki dapat memberikan aliran listrik bila dihubungkan dengan suatu rangkaian luar. Aki ini dapat dimanfaatkan salah satunya sebagai sumber energi listrik pada motor listrik.
Sekarang ada solusi sepeda motor listrik yang mulai dikembangkan. Sepeda motor listrik hanya menggunakan aki sehingga tidak mengeluarkan polusi sama sekali. Sepeda motor listrik pun sudah bisa jalan dengan kecepatan hingga 60 km/jam sehingga untuk berkendaran di dalam kota sangat cukup.
Dengan segala keterbatasan pengetahuan yang dimiliki penulis, dengan melihat alasan tersebut, penulis mengajukan tugas akhir dengan judul
1.2. Maksud dan Tujuan
Adapun maksud dan tujuan dari rancangan pembuatan sepeda motor listrik adalah sebagai berikut.
1. Mempelajari dan memahami prinsip kerja Motor Listrik
2. Dapat mengetahui prinsip dan cara kerja dari alat yang dibuat sehingga dapat digunakan dalam aplikasinya
3. Untuk mengetahui kegunaan dan cara kerja komponen yang digunakan pada alat tersebut.
4. Menerapkan ilmu yang didapat dari bangku kuliah dalam bentuk perancangan dan pembuatan alat.
5. Mendukung program Green Campaign dan penghematan bahan bakar fosil.
6. Serta untuk memenuhi salah satu syarat kelulusan studi di Program Diploma Teknik Elektro Universitas Gadjah Mada.
1.3. Permasalahan
Permasalahan yang dihadapi penulis dalam pembuatan tugas akhir ini antara lain:
1. Bagaimana merangkai sepeda, accumulator dan motor listrik menjadi sebuah sepeda motor listrik.
2. Banyak penggunaan motor listrik yang digunakan secara modern dan canggih namun ini bermula dari motor listrik yang dirangkai secara sederhana, oleh karena itu penulis memilih untuk merancang sepeda motor listrik sederhana.
1.4. Batasan Masalah
Mengingat begitu luasnya masalah yang menyangkut pembuatan sepeda motor listrik yang meliputi sistem kerangka, sistem rem, sistem gerigi, sistem penggerak, sistem pengukur kecepatan dan sistem kelistrikan, maka ruang lingkup perlu dibatasi.
Batasan dalam proyek akhir ini adalah sebagai berikut: 1. Hanya motor listrik DC yang akan dipelajari.
2. Sistem kelistrikan alat yang digunakan.
3. Analisis dengan asumsi ideal yang akan digunakan.
1.5. Metode Pengumpulan Data
Tugas akhir ini dengan judul “Sepeda Motor Listrik (Electric
Motorcycle)” ini disusun secara bertahap untuk memudahkan dalam pembuatan
alat maupun penyusunan laporannya. Adapun tahap-tahapannya dapat dijabarkan sebagai berikut:
1. Metode Pustaka
Yaitu dengan cara mencari literature yang ada kaitannya dengan Tugas Akhir yang sedang dibuat.
2. Metode Perancangan Sistem
Yaitu dengan cara mencoba-coba membuat desain rangkaian yang akan dibuat.
3. Metode pengujian
Yaitu dilakukan untuk menguji rangkaian yang dirancang sudah sesuai dengan yang diharapkan atau belum.
4. Penulisan Laporan Tugas Akhir
Penulisan hasil studi literature dan hasil pengujian serta proses pembuatan “Sepeda Motor Listrik (Electric Motorcycle)”.
1.6. Sistematika Penulisan Laporan
Sistematika penulisan laporan dengan judul “Sepeda Motor Listrik (Electric Motorcycle)” adalah sebagai berikut:
BAB I PENDAHULUAN
Memuat latar belakang masalah, maksud dan tujuan, permasalahan, batasan masalah, metode pengumpulan data, dan sistematika penulisan laporan.
BAB II DASAR TEORI
Membahas tentang komponen-komponen yang digunakan dalam perancangan alat. Pembahasan berdasarkan sifat, kegunaan dan karakteristik dari bagian-bagian tersebut.
BAB III PERANCANGAN ALAT
Membahas mengenai penggunaan komponen, letak komponen, cara kerja rangkaian, serta sistem-sistem lain yang mendukung.
BAB IV PENGAMATAN DAN ANALISIS
Membahas tentang hasil pengamatan dan analisis data, sehingga dapat diketahui fungsi masing-masing bagian dalam suatu sistem (objek penelitian).
BAB V PENUTUP
Membahas tentang kesimpulan dan saran-saran, sehingga tugas akhir ini dapat dikembangkan lebih lanjut, dengan harapan dapat digunakan atau diaplikasikan dalam kehidupan bermasyarakat.
DAFTAR PUSTAKA LAMPIRAN
BAB II DASAR TEORI
2.1 Tinjauan Umum
Listrik merupakan suatu energi yang dibangkitkan oleh pembangkit listrik (alternator, generator, dinamo yang diputar). Energi listrik sangatlah fleksibel, yaitu dapat diubah menjadi energi yang lain seperti energi gerak (mekanik), energi panas, energi cahaya dan juga dapat ditampung pada accumulator (penampung) dalam energi kimia. Sesuai dengan hukum Kekekalan Energi oleh Joule, bahwa “Energi tidak dapat diciptakan maupun dimusnahkan, energi hanya dapat diubah bentuk yang satu kebentuk lainnya.”
2.1.1 Arah arus listrik
Arus listrik yaitu aliran listrik yang mengalir melalui penghantar atau konduktor pada suatu rangkaian tertutup. Arah arus listrik mengalir dari kutub positif (terminal plus) melalui penghantar ke kutub negatif, pada suatu rangkaian tertutup. Arah arus listrik bertentangan dengan arus elektron yaitu dari kutub negatif melalui penghantar ke kutub pasitif, pada suatu rangkaian tertutup. Pertentangan antara arus listrik dan arus elektron tidak perlu menimbulkan kesalahpahaman mengingat bahwa bila arus listrik mengalir dalam suatu arah maka bersamaan dengan itu arus elektron mengalir berlawanan arah.
2.1.2 Hukum Ohm
Hubungan antara tegangan, arus dan hambatan sesuai dengan Hukum Ohm yaitu “Arus listrik pada suatu rangkaian tertutup berbanding lurus dengan tegangan dan berbanding terbalik dengan hambatan.”
V
R
………..
(2.1)Keterangan
I = Kuat Arus Listrik (Ampere)
V= Tegangan (Volt)
R= Hambatan (Ohm)
2.1.3 Arus searah dan arus bolak-balik
a. Arus searah direct current (DC)
Arus searah (DC) adalah aliran elektron dari suatu titik yang energi potensialnya tinggi ke titik lain yang energi potensialnya lebih rendah. Sumber arus listrik searah biasanya adalah baterai. Arus searah biasanya mengalir pada sebuah konduktor, walaupun mungkin saja arus searah mengalir pada semi-konduktor, isolator, dan ruang hampa udara.
Arus searah dulu dianggap sebagai arus positif yang mengalir dari ujung positif sumber arus listrik ke ujung negatifnya. Pengamatan-pengamatan yang lebih baru menemukan bahwa sebenarnya arus searah merupakan arus negatif (elektron) yang mengalir dari kutub negatif ke kutub positif. Aliran elektron ini
menyebabkan terjadinya lubang-lubang bermuatan positif, yang "tampak" mengalir dari kutub positif ke kutub negatif.
Penyaluran tenaga listrik komersil yang pertama (yang dibuat oleh Thomas Edison di akhir abad ke 19) menggunakan listrik arus searah. Karena listrik arus bolak-balik lebih mudah digunakan dibandingkan dengan listrik arus searah untuk transmisi (penyaluran) dan pembagian tenaga listrik, di zaman sekarang hampir semua transmisi tenaga listrik menggunakan listrik arus bolak-balik.
b. Arus listrik bolak-balik alternating current (AC)
Arus bolak-balik (AC) adalah arus listrik dimana besarnya dan arahnya arus berubah-ubah secara bolak-balik. Berbeda dengan arus searah dimana arah arus yang mengalir tidak berubah-ubah dengan waktu. Bentuk gelombang dari listrik arus bolak-balik biasanya berbentuk gelombang sinusoida, karena ini yang memungkinkan pengaliran energi yang paling efisien. Namun dalam aplikasi-aplikasi spesifik yang lain, bentuk gelombang lain pun dapat digunakan, misalnya bentuk gelombang segitiga (triangular wave) atau bentuk gelombang segi empat (square wave).
2.2 Accumulator (Aki)
Baterai adalah suatu kimia listrik dimana energi listrik diubah menjadi energi kimia yang kemudian diubah kembali menjadi energi listrik bila diperlukan. Bila energi listrik diubah menjadi energi kimia berarti baterai sedang diisi (charge) dan
jika diubah dari energi kimia menjadi energi listrik berarti baterai sedang mengeluarkan isi (discharge).
Aki menjadi pilihan praktis karena dapat menghasilkan listrik yang cukup besar dan dapat diisi kembali. Aki berasal dari kata accumulator atau biasa disingkat accu. Aki dapat memberikan aliran listrik bila dihubungkan dengan suatu rangkaian luar. Sel aki terdiri dari anoda atau lempeng negatif Pb (timbal = timah hitam) dan
katoda atau lempeng positif PbO2 (10ynamo10 oksida), keduanya merupakan zat
padat, yang dicelupkan dalam larutan asam sulfat. Kedua elektroda tersebut, juga hasil reaksinya, tidak larut dalam larutan asam sulfat, sehingga tidak perlu memisahkan anoda dan katoda dan dengan demikian tidak perlu jembatan garam, yang perlu dijaga adalah jangan sampai kedua elektroda tersebut saling bersentuhan.
Aliran listrik pada aki terjadi karena reaksi kimia dari asam sulfat dengan Pb dari anoda dan PbO2 dari katoda yang merupakan bahan aktifnya. Reaksi redoks spontan ini bersifat dapat balik (reversible) antara proses pengisian muatan (charging) dan pelepasan muatan (discharging). Pada pelepasan muatan listrik, oksigen dari PbO2 bereaksi dengan 10ynamo10l dari H2SO4 sehingga terbentuk air. Pada saat yang sama Pb dari PbO2 bereaksi dengan ion sulfat membentuk PbSO4, demikian pula Pb dari anoda akan menjadi PbSO4.
Jika pelepasan muatan listrik terjadi terus-menerus, asam sulfat yang berfungsi sebagai cairan elektrolit akan lebih encer dan reaksi akan terus berlangsung sampai seluruh bahan aktif menjadi PbSO4. Jika aki tidak dapat memberikan tenaga listrik pada voltase tertentu maka aki perlu diisi muatan kembali (charging atau reaksi
ke kiri dari reaksi total). Pengisian muatan listriknya kebalikan dari reaksi kimia pada saat melepaskan muatan (discharging atau reaksi ke kanan dari reaksi total).
PbSO4 yang terbentuk dari proses pelepasan muatan terurai menjadi Pb pada anoda, PbO2 pada katoda dan H2O menjadi 11ynamo11l dan oksigen. Hidrogen ini akan bereaksi dengan ion sulfat yang dibebaskan dari katoda dan anoda menjadi H2SO4. Oksigennya akan bereaksi dengan Pb, sehingga terbentuk PbO2 pada katoda. Densitas atau rapatan larutan asam sulfat menjadi lebih rendah pada saat discharging, karena terbentuknya air yang densitasnya lebih rendah (1,000 g/ml) daripada larutan asam sulfat yang terdapat dalam aki (1,280 g/ml). Sebaliknya pada saat charging air dipakai untuk membentuk asam sulfat sehingga densitas larutan asam sulfat akan naik.
Reaksi Kimia Baterai adalah sebagai berikut: Reaksi kimia saat baterai diisi (charge)
PbSO4 + 2H2O + PbSO4 → PbO2 + 2H2SO4 + Pb
Reaksi kimia saat baterai mengeluarkan arus (discharge) PbO2 + 2H2SO4 + Pb → PbSO4 + 2H2O + PbSO4
2.3 Motor Listrik
Motor listrik merupakan sebuah perangkat elektromagnetis yang mengubah 11ynamo listrik menjadi 11ynamo mekanik. Energi mekanik ini digunakan untuk, misalnya, memutar impeller pompa, fan atau blower, menggerakan kompresor, mengangkat bahan, dll. Motor listrik digunakan juga di rumah (mixer, bor listrik, fan
angin) dan di 12 ynamo 12 l. Motor listrik kadangkala disebut “kuda kerja” nya 12 ynamo 12 l sebab diperkirakan bahwa motor-motor menggunakan sekitar 70% beban listrik total di 12ynamo12l.
2.3.1 Cara kerja motor listrik
Mekanisme kerja untuk seluruh jenis motor secara umum sama • Arus listrik dalam medan magnet akan memberikan gaya
• Jika kawat yang membawa arus dibengkokkan menjadi sebuah lingkaran Pasangan gaya menghasilkan tenaga putar/ torque untuk memutar kumparan.
• Motor-motor memiliki beberapa loop pada dinamonya untuk memberikan tenaga putaran yang lebih seragam dan medan magnetnya dihasilkan oleh susunan elektromagnetik yang disebut kumparan medan/loop, maka kedua sisi loop, yaitu pada sudut kanan medan magnet, akan mendapatkan gaya pada arah yang berlawanan.
Dalam memahami sebuah motor, penting untuk mengerti apa yang dimaksud dengan beban motor. Beban mengacu kepada keluaran tenaga putar/ torque sesuai dengan kecepatan yang diperlukan. Beban umumnya dapat dikategorikan kedalam tiga kelompok (BEE India, 2004):
• Beban torque konstan adalah beban dimana permintaan keluaran energinya bervariasi dengan kecepatan operasinya namun torque nya
tidak bervariasi. Contoh beban dengan torque konstan adalah
conveyors, rotary kilns, dan pompa displacement konstan.
• Beban dengan 13ynamo13l torque adalah beban dengan torque yang bervariasi dengan kecepatan operasi. Contoh beban dengan 13 ynamo 13 l torque adalah pompa sentrifugal dan fan (torque bervariasi sebagai kwadrat kecepatan).
• Beban dengan 13ynamo konstan adalah beban dengan permintaan
torque yang berubah dan berbanding terbalik dengan kecepatan.
Contoh untuk beban dengan daya konstan adalah peralatan-peralatan mesin.
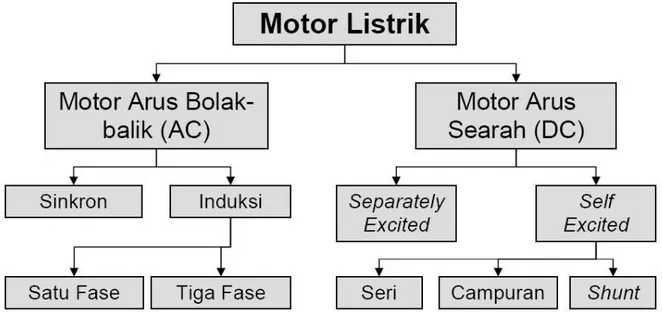
2.3.2 Jenis-jenis Motor Listrik
Jenis-jenis motor listrik dapat dilihat seperti gambar bagan berikut.
2.3.3 Mesin Arus Searah
Mesin arus searah dapat berupa generator DC atau motor DC. Generator DC alat yang mengubah 14ynamo mekanik menjadi 14ynamo listrik DC. Motor DC alat yang mengubah 14ynamo listrik DC menjadi 14ynamo mekanik putaran. Sebuah motor DC yang memiliki tiga komponen utama, antara lain sebagai berikut.
• Kutub medan. Secara sederhana digambarkan bahwa interaksi dua kutub magnet akan menyebabkan perputaran pada motor DC. Motor DC memiliki kutub medan yang stasioner dan 14 ynamo yang menggerakan bearing pada ruang diantara kutub medan. Motor DC sederhana memiliki dua kutub medan: kutub utara dan kutub selatan. Garis 14 ynamo 14 l 14 ynamo membesar melintasi bukaan diantara kutub-kutub dari utara ke selatan. Untuk motor yang lebih besar atau lebih komplek terdapat satu atau lebih 14 ynamo 14 l 14 g 14 et. Elektromagnet menerima listrik dari sumber daya dari luar sebagai penyedia struktur medan.
• Dinamo. Bila arus masuk menuju 14 ynamo, maka arus ini akan menjadi 14 ynamo 14 l 14 g 14 et. Dinamo yang berbentuk silinder, dihubungkan ke as penggerak untuk menggerakan beban. Untuk kasus motor DC yang kecil, 14ynamo berputar dalam medan magnet yang dibentuk oleh kutub-kutub, sampai kutub utara dan selatan magnet
berganti lokasi. Jika hal ini terjadi, arusnya berbalik untuk merubah kutub-kutub utara dan selatan 15ynamo.
• Commutator. Komponen ini terutama ditemukan dalam motor DC. Kegunaannya adalah untuk membalikan arah arus listrik dalam 15ynamo. Commutator juga membantu dalam transmisi arus antara 15ynamo dan sumber daya.
Keuntungan utama motor DC adalah sebagai pengendali kecepatan, yang tidak mempengaruhi kualitas pasokan daya. Motor ini dapat dikendalikan dengan mengatur:
• Tegangan 15 ynamo – meningkatkan tegangan 15 ynamo akan meningkatkan kecepatan
• Arus medan – menurunkan arus medan akan meningkatkan kecepatan. Motor DC tersedia dalam banyak ukuran, namun penggunaannya pada umumnya dibatasi untuk beberapa penggunaan berkecepatan rendah, penggunaan daya rendah hingga sedang seperti peralatan mesin dan
rolling mills, sebab sering terjadi masalah dengan perubahan arah arus
listrik mekanis pada ukuran yang lebih besar. Juga, motor tersebut dibatasi hanya untuk penggunaan di area yang bersih dan tidak berbahaya sebab resiko percikan api pada sikatnya. Motor DC juga 15ynamo15l mahal dibanding motor AC.
Hubungan antara kecepatan, flux medan dan tegangan dinamo ditunjukkan dalam persamaan
berikut:
Gaya elektromagnetik: E = kΦn………..….(2.2)
Torque: = kΦIa……….(2.3)
Dimana:
E =gaya elektromagnetik yang dikembangkan pada terminal dinamo (volt) Φ = flux medan yang berbanding lurus dengan arus medan
n = kecepatan dalam RPM (putaran per menit) = torque elektromagnetik
Ia = arus dinamo
k = konstanta persamaan
Motor DC sumber daya terpisah/ Separately Excited
Jika arus medan dipasok dari sumber terpisah maka disebut motor DC sumber daya terpisah/separately excited.
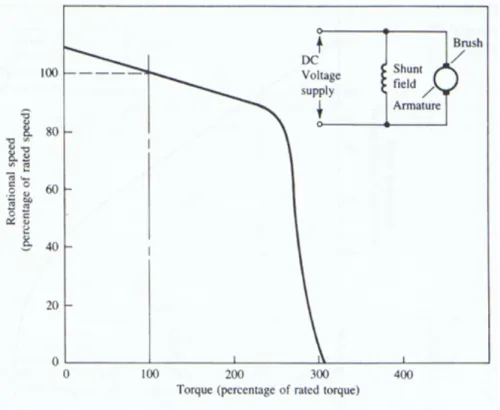
Motor DC sumber daya sendiri/ Self Excited: motor shunt
Pada motor shunt, gulungan medan (medan shunt) disambungkan secara paralel dengan gulungan jangkar (A) seperti diperlihatkan dalam gambar 2.2. Oleh karena itu total arus dalam jalur merupakan penjumlahan arus medan dan arus dinamo
Gambar 2.2 Karakteristik Motor DC Shunt Berikut tentang kecepatan motor shunt :
• Kecepatan pada prakteknya konstan tidak tergantung pada beban (hingga
torque tertentu) setelah kecepatannya berkurang, lihat Gambar 2.2 dan
oleh karena itu cocok untuk penggunaan komersial dengan beban awal yang rendah, seperti peralatan mesin.
• Kecepatan dapat dikendalikan dengan cara memasang tahanan dalam susunan seri dengan dinamo (kecepatan berkurang) atau dengan memasang tahanan pada arus medan (kecepatan bertambah).
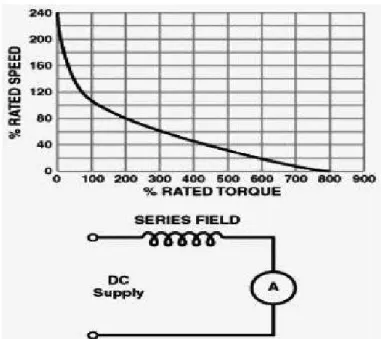
Dalam motor seri, gulungan medan (medan shunt) dihubungkan secara
seri dengan gulungan jangkar (A) seperti ditunjukkan dalam gambar 2.3. Oleh karena itu, arus medan sama dengan arus dinamo. Berikut tentang kecepatan
motor seri (Rodwell International Corporation, 1997): • Kecepatan dibatasi pada 5000 RPM
• Harus dihindarkan menjalankan motor seri tanpa ada beban sebab motor akan mempercepat tanpa terkendali.
Motor-motor seri cocok untuk penggunaan yang memerlukan torque
penyalaan awal yang tinggi, seperti derek dan alat pengangkat hoist (lihat Gambar 2.3).
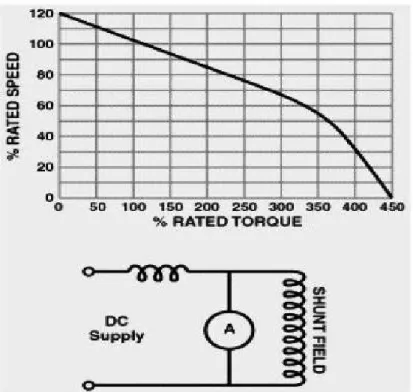
Motor DC Kompon/Gabungan
Motor Kompon DC merupakan gabungan motor seri dan shunt. Pada
motor kompon, gulungan medan (medan shunt) dihubungkan secara paralel dan seri dengan gulungan jangkar (A) seperti yang ditunjukkan dalam gambar 2.4. Sehingga, motor kompon memiliki torque penyalaan awal yang bagus dan kecepatan yang stabil. Makin tinggi persentase penggabungan (yakni persentase gulungan medan yang dihubungkan secara seri), makin tinggi pula
torque penyalaan awal yang dapat ditangani oleh motor ini. Contoh,
penggabungan 40-50% menjadikan motor ini cocok untuk alat pengangkat
hoist dan derek, sedangkan motor kompon yang standar (12%) tidak cocok
(My Electrical, 2005).
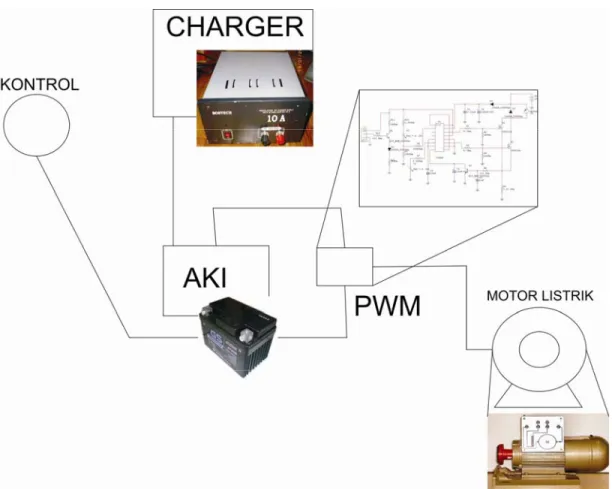
Pada bab ini akan dibahas mengenai perancangan perangkat-perangkat yang digunakan dalam pembuatan sepeda motor listrik (electric motorcycle) yang meliputi
charger, rangkaian PWM (Pulse Width Modulation), accumulator, kontrol dan motor
listrik serta sistem mekaniknya.
3.1 Diagram Sistem Keseluruhan
Diagram sistem secara keseluruhan ditunjukkan oleh gambar 3.1.
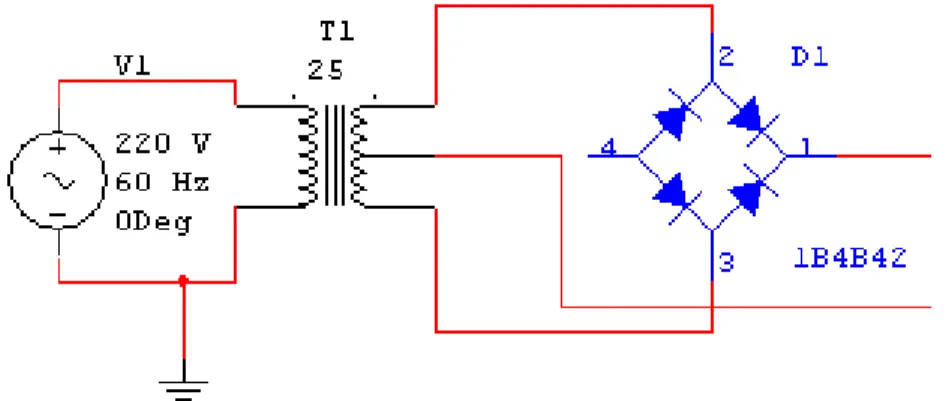
Gambar 3.2 Rangkaian charger
Komponen yang digunakan dalam rangkaian charger antara lain;
transformator dan dioda bridge.
3.2.1 Transformator
Transformator atau sering juga disebut trafo adalah komponen elektronika pasif yang berfungsi untuk mengubah (menaikkan atau menurunkan) tegangangan listrik bolak-balik (AC). Bentuk dasar transformator adalah sepasang ujung pada bagian primer dan sepasang ujung pada bagian sekunder. Bagian primer dan skunder adalah merupakan lilitan kawat email yang tidak berhubungan secara elektris. Kedua lilitan kawat ini dililitkan pada sebuah inti yang dinamakan inti trafo. Untuk trafo yang digunakan pada tegangan AC frekuensi rendah
impedansi. Untuk trafo frekuensi rendah contohnya adalah trafo penurun tegangan (Step Down Trafo) yang digunakan pada peralatan-peralatan elektronik tegangan rendah, adaptor, pengisi battery. Trafo jenis ini jika pada bagian primernya kita hubungkan dengan tegangan AC 220 volt maka pada bagian skundernya akan mengeluarkan tegangan yang lebih rendah. Pada rangkaian tersebut trafo berfungsi untuk menurunkan tegangan AC dari jala-jala PLN yang 220 volt menjadi sebesar tegangan yang dibutuhkan peralatan tersebut agar dapat bekerja normal, misalnya 3 volt, 6 volt, 12 volt atau 25 volt.
Prinsip trafo penurun tegangan adalah jumlah lilitan primernya lebih banyak dari pada jumlah lilitan skundernya. Jika dilihat dari besarnya ukuran kawat email yang digunakan, trafo penurun tegangan memiliki ukuran kawat yang lebih kecil pada lilitan primernya. Sebaliknya trafo penaik tegangan memiliki ukuran kawat yang lebih besar pada lilitan primernya. Hal ini dikarenakan pada trafo penurun tegangan output (keluaran) arus listriknya lebih besar, sedangkan trafo penaik tegangan memiliki out put arus yang lebih kecil. Sementara itu frekuensi tegangan pada input dan outputnya tetap (tidak ada perubahan). Parameter lain adalah efisiensi daya trafo. Dalam kinerjanya trafo yang bagus memiliki efisiensi daya yang besar (sekitar 70-80%). Daya yang
serta faktor-faktor lainnya.
Secara fisik trafo yang bagus adalah trafo yang memiliki inti trafo yang rata dan rapat serta jika digunakan tidak bergetar, sehingga efisiensi dayanya bagus. Dalam penggunaannya perhatikan baik-baik tegangan kerja trafo, tiap tep-nya biasanya ditulis tegangan kerjanya misalnya pada primernya 0V - 110V - 220V, untuk tegangan 220 volt gunakan tep 0V dan 220V, sedangkan untuk tegangan 110 volt gunakan 0V dan 110V, jangan sampai salah atau trafo kita bakal hangus! Dan pada skundernya misalnya 0V - 3V - 6V - 12V – 25V, gunakan 0V dan tegangan yang diperlukan. Ada juga jenis trafo yang menggunakan CT (Center Tep) yang artinya adalah titik tengah. Contoh misalnya 25V - CT - 25V, artinya jika kita gunakan tep CT dan 25V maka besarnya tegangan adalah 25 volt.
Transformator yang digunakan adalah transformator penurun tegangan dari 220 V menjadi 25 V dengan arus maksimal 10 Ampere. Gambar transformator yang digunakan dalam rangkaian charger ditunjukkan oleh gambar 3.3. Alasan memakai travo 10 Ampere adalah mempercepat pengisian accu sesuai dengan waktu yang dapat ditentukan.
3.2.2 Dioda
Dioda adalah piranti semikonduktor dengan bahan tipe-n yang menyediakan elektron-elektron bebas dan bahan tipe-p yang disatukan (P-N junction). Dioda merupakan suatu piranti dua elektroda dengan arah arus yang tertentu, dapat juga dikatakan dioda bekerja sebagai penghantar bila tegangan listrik diberikan dalam arah tertentu tetapi dioda akan bekerja sebagai isolator bila tegangan yang diberikan alam arah berlawanan dari pergerakan elektron pembentuknya.
Kristal pn sebagai penyusun dioda akan bekerja jika arus didalamnya hanya dapat mengalir dalam satu arah dan tidak sebaliknya. Hubungan ini disebut dengan rangkaian prategangan maju (fowrard bias). Pada dioda, kita mengenal potensial barrier yaitu beda potensial pada persambungan. Beda potensial ini menjadi cukup besar untuk menghalangi proses penyebaran difusi selanjutnya dari elektron-elektron
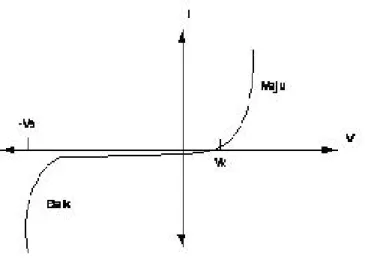
Gambar 3.4 Kurva Dioda
Gambar 3.4 merupakan kurva karakteristik dioda pada pra tegangan maju (forward) dan pra tegangan balik (reverse). Dari gambar karakteristik tersebut dapat dianalisa bahwa sebuah dioda akan mengalirkan arus setelah tegangan luar mengatasi potensial barrier, maka arus maju akan menjadi besar. Pada kurva dengan karakteristik balik saat tegangan yang diberikan sama dengan nol, maka tidak ada arus yang mengalir jika tegangan dinaikkan maka arus akan sangat kecil. Saat arus maju terlalu besar maka dioda akan rusak karena disipasi daya terlalu besar. Jika pada arah balik tegangan yang terlalu tinggi akan menimbulkan kedadalan (breakdown) listrik pada dioda.
Dioda yang digunakan adalah dioda bridge dengan arus maksimal 25 ampere. Dioda bridge adalah dioda silicon yang dirangkai menjadi suatu bridge dan dikemas menjadi satu kesatuan komponen. Di pasaran terjual berbagai bentuk dioda bridge dengan berbagai macam kapasitasnya. Ukuran dioda bridge yang utama adalah voltage dan ampere maksimumnya. Dioda bridge digunakan sebagai penyearah pada
charger.
searah atau DC.
Gambar 3.7 Dioda bridge yang digunakan
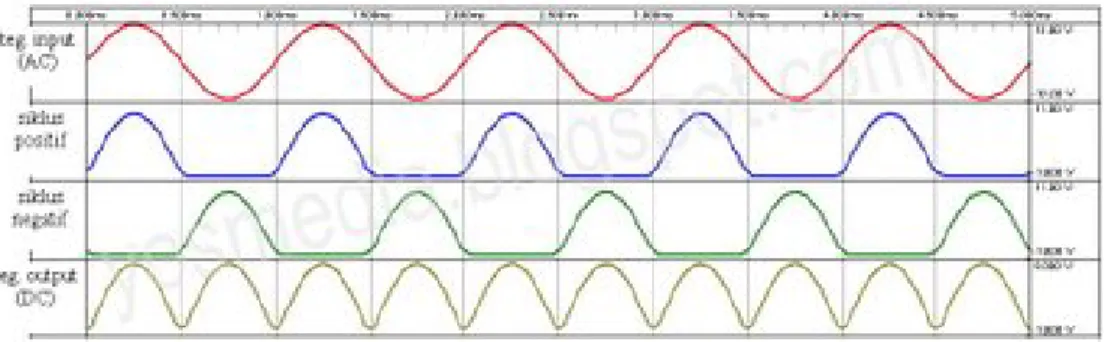
maka pada titik dioda 2-1 akan terjadi siklus positif. Akibatnya dioda 2-1 akan mengalami panjaran maju (forward bias) sehingga arus mengalir di 2-1 menuju beban dan kembali masuk ke CT.
Saat tegangan input (tegangan primer) berada pada siklus negatif , maka pada titik dioda 3-1 akan terjadi sil;us positif. Akibatnya dioda 3-1 akan mengalami panjaran maju (forward bias) sehingga arus mengalir di 3-1 menuju beban dan kembali masuk ke CT.
Dari penjelasan cara kerja penyearah gelombang penuh jenis ini terlihat bahwa tegangan yang terjadi pada beban mempunyai polaritas yang sama tanpa memperdulikan dioda mana yang menghantar karena arus mengalir melalui arah yang sama sehingga akan terbentuk gelombang penuh yang disearahkan seperti ditunjukkan pada grafik sinyal berikut.
dilewatkan oleh dioda harus lebih besar dari besar arus yang dilewatkan pada rangkaian.
3.3 Rangkaian PWM (Pulse Width Modulation)
Rangkaian pengendali motor ini dibuat menggunakan prinsip PWM
(Pulse Width Modulation). PWM mengatur kecepatan motor menggunakan
gelombang kotak yang lebar pulsanya dimodulasi, sehingga menghasilkan tegangan rata-rata yang bervariasi. Teknik ini memberikan kemudahan dalam pengaturan kecepatan motor, tanpa banyak energi yang terbuang. Output dari PWM berupa gelombang kotak seperti gambar di bawah.
Gambar 3.10 Output PWM
Ton adalah perioda output tinggi (Vmax), sedangkan Toff adalah perioda output rendah (0V). Perioda satu gelombang penuh adalah :
Off On Total T T
Tegangan output bervariasi sesuai dengan Duty Cycle, yaitu: in Total On out in out V T T V V D V × = × =
Dari persamaan di atas terlihat jika Ton = 0 maka Vout = 0 dan akan meningkat dengan semakin besarnya Ton. Output maksimum akan dicapai pada
Ton=TTotal yaitu sebesar Vin
Rangkaian Pengendali ini memanfaatkan komponen ICSG3525 sebagai pengontrol PWM, dengan susunan pin sebagai berikut:
Gambar 3.11 Pin ICSG3525
Gambar 3.12 Diagram Blok ICSG3525
Rangkaian pengendali motor seperti gambar di bawah.
nyala lampu Led D3 yang selanjutnya digunakan untuk mengatur nilai resistansi pada LDR R9. Perubahan nilai resistansi R9 ini akan memvariasi nilai masukan pada pin 2 IC SG3525 untuk menentukan nilai Duty Cycle dari output PWM, yang selanjutnya akan menentukan kecepatan motor.
Perioda total (TTotal) dari output PWM diatur dengan menggunakan VR2 yang dihubungkan seri dengan R7 dan dihubungkan ke pin 6 (RT). Resistansi total kedua resistor ini bersama dengan C5 yang dihubungkan dengan pin 5 (CT), digunakan untuk menentukan frekuensi oscillator pada komponen PWM, sehigga menghasilkan perioda total yang sesuai.
Output A (pin 11) dan Output B (pin 14) masing-masing dihubungkan ke kaki G MOSFET Q1 dan Q2 yang untuk mengendalikan kecepatan motor berdasarkan pulsa PWM yang dihasilkan. Pulsa PWM ini berupa gelombang kotak yang berselang-seling antara Output A dengan Output B. Kaki S dari Q1 dan Q2 dihubungkan ke ground melalui R5 sekaligus dipakai untuk memberi kondisi pin 8 IC SG3525 (Soft-Start) melalui transistor Q3 untuk mengontrol PWM. Dioda D1 dipasang untuk melindungi dari beban lebih (overload) motor. D2 berfungsi melindungi dari short tegangan sumber.
adalah kemudahan dalam pengontrolan dengan menggunakan pengaturan tegangan DC. Medan stator motor jenis ini dihasilkan oleh magnet permanen bukan elektromagnet. Penggunaan magnet permanen tidak membutuhkan daya listrik untuk menghasilkan medan stator, sehingga daya dan pendinginan yang diperlukan lebih rendah dibandingkan motor yang menggunakan elektromagnet. Perubahan kecepatan motor dapat dengan mudah diatur dengan cara mengubah ubah besarnya tegangan DC yang diberilkan pada motor.
3.5 Sistem Mekanik
Sistem mekanik yang direncanakan dapat dilihat pada gambar 3.6, yang terdiri dari:
a. Kerangka alat yaitu tempat pemegang poros dan motor yang terbuat dari campuran besi dan baja.
b. Transmisi belt atau rantai yaitu alat yang menghubungkan pulley motor DC dengan pulley pemutar roda.
c. Perbandingan pulley motor DC dengan pulley pemutar roda adalah 1 : 5. Dengan pulley motor DC 11 dan pulley pemutar roda 55.
d. Motor penggerak yaitu menggunakan motor DC dengan kecepatannya yang dikontrol menggunakan rangkaian PWM .
BAB IV
HASIL PENGUJIAN DAN PEMBAHASAN
Pada bab ini akan dibahas mengenai pengujian alat yang selanjutnya akan di analisa, hal ini dimaksudkan untuk memperoleh data yang dibutuhkan dan untuk mengetahui kemampuan alat yang direncanakan apakah bekerja sesuai dengan yang diharapkan dan berjalan sesuai dengan teori yang direncanakan.
Dari hasil rancangan dan pembuatan sepeda motor listrik (electric motorcycle) ini mempunyai hasil yang tampak pada gambar 4.1 berikut.
4.1 Pengujian Rangkaian PWM Motor DC
Pengujian rangkaian PWM motor DC bertujuan untuk mengetahui apakah sistem rangkaian yang dibuat sesuai dengan yang direncanakan atau tidak.
Langkah–langkah pengujian rangkaian PWM motor DC adalah sebagai
berikut.
1. Menyiapakan alat dan bahan yang akan digunakan dalam percobaan, yaitu rangkaian PWM motor DC, power supply, dan LED.
2. Menyusun rangkaian seperti pada diagram balok berikut :
Gambar 4.2 Diagram Balok Pengujian Rangkaian Driver Motor DC
3. LED dihubungkan dengan keluaran dari rangkaian PWM motor DC, kemudian output dari rangkaian tersebut berupa menyala atau tidaknya LED tersebut.
4. Hasil dari keluaran LED dicatat dan ditabelkan.
Power Supply
Rangkaian PWM Motor DC
Dari hasil pengujian didapatkan seperti pada tabel 4.1. dibawah ini. Tabel 4.1 Hasil Pengujian Rangkaian Driver Motor DC
Input ( Catu Daya ) Output ( LED ) Keterangan
ON Menyala Berfungsi
OFF Mati Tidak Berfungsi
4.2 Pengujian Kecepatan
Pengujian kecepatan putar dilakukan dengan menggunakan tachometer yang dihubungkan langsung ke sumbu putar. Tujuan pengujian ini adalah untuk mengetahui kecepatan maksimal sepeda motor listrik tanpa beban maupun berbeban.
4.2.1`Pengujian kecepatan putar motor DC
Langkah-langkah pada pengujian kecepatan putar motor DC dan pulley roda sesuai dengan handel gas adalah sebagai berikut.
1. Menyiapkan alat dan bahan yang akan digunakan dalam percobaan, yaitu
tachometer dan sepeda motor listrik yang akan diuji.
2. Pasang tachometer pada pusat putaran pulley motor DC dan roda.
3. Pengaturan ini bervariasi sesuai dengan tingkat putaran handel gas, yaitu kecepatan 1, kecepatan 2 dan kecepatan 3.
4. Mencatat penunjukan alat ukur setiap kali melakukan perubahan variasi tarikan handel gas.
Tabel 4.2 Putaran Pulley Motor DC Tingkat kecepatan putar motor
listrik
Rpm
Kecepatan 1 (12 Volt) 864
Kecepatan 2 (24 Volt) 1675
Kecepatan 3 (36 Volt) 2601
4.2.2 Penghitungan kecepatan sepeda motor listrik
Dari data di atas dapat dihitung kecepatan sepeda motor listrik ini. Disini tidak ada alat penghitung kecepatan sepeda motor listrik karena kesulitan dalam tempat maupun dana. Oleh karena itu kecepatan sepeda motor listrik ini dihitung secara manual.
ϖ Kecepatan 1 tanpa beban
Dengan diketahui kecepatan putar poros adalah 864 rpm • Menghitung kecepatan dalam rotasi / detik
Kec. = rotasi/menit : 60 Kec. = 864 : 60
= 14,4 rotasi / detik
• Menghitung kecepatan putar roda
Kec. Putar roda = Kec. Putar poros
Rumus yang didapat ini dikarenakan perbandingan gerigi poros dengan gerigi roda adalah 11 berbanding 55. Maka kecepatan putar roda adalah sebagai berikut.
Kec. = 14,4 rotasi / detik
= 2,88 rotasi / detik
Jadi kecepatan putar roda adalah 2,88 rotasi / detik. Dengan diketahuinya kecepatan putar roda maka dapat menghitung kecepatan sepeda motor saat melaju dijalan dengan mengetahui keliling roda. • Menghitung keliling roda
Karena roda berbentuk bulat / lingkaran maka dapat menggunakan rumus lingkaran untuk menghitung keliling roda.
K = 2 r atau d Keterangan K = keliling lingkaran r = jari-jari lingkaran d = diameter lingkaran maka, K = 3,14 . 29,6 = 92,94 cm = 0,93 m
• Menghitung kecepatan motor listrik saat melaju
.
Keterangan
= kecepatan laju sepeda motor listrik
K = keliling roda
V roda = kecapatan putar roda
Maka, Vsepeda = 0,93 meter . 2,88 rotasi / detik
= 2,68 meter / detik
= 9,648 km / jam
Jadi kecepatan laju sepeda motor listrik tanpa beban pada kecepatan pertama adalah 9,648 km / jam.
ϖ Kecepatan 2 tanpa beban
Dengan diketahui kecepatan poros adalah 1675 rpm • Menghitung kecepatan dalam rotasi / detik
Kec. = rotasi/menit : 60 Kec. = 1675 : 60
= 27,92 rotasi / detik
Ini adalah kecepatan putar poros motor listrik. • Menghitung kecepatan putar roda
Rumus yang didapat ini dikarenakan perbandingan gerigi poros dengan gerigi roda adalah 11 berbanding 55. Maka kecepatan putar roda adalah sebagai berikut.
Kec. = 27,92 rotasi / detik
= 5,58 rotasi / detik
Jadi kecepatan putar roda adalah 5,58 rotasi / detik. Dengan diketahuinya kecepatan putar roda maka dapat menghitung kecepatan sepeda motor saat melaju dijalan dengan mengetahui keliling roda. • Menghitung keliling roda
Karena roda berbentuk bulat / lingkaran maka kita dapat menggunakan rumus lingkaran untuk menghitung keliling roda.
K = 2 r atau d Keterangan K = keliling lingkaran r = jari-jari lingkaran d = diameter lingkaran maka, K = 3,14 . 29,6 = 92,94 cm = 0,93 m
Jadi keliling roda belakang sepeda motor listrik tersebut adalah 0,93m.
• Menghitung kecepatan motor listrik saat melaju
Keterangan
= kecepatan laju sepeda motor listrik
K = keliling roda
V roda = kecapatan putar roda
Maka, Vsepeda = 0,93 meter . 5,58 rotasi / detik
= 5,18 meter / detik
= 18,648 km / jam
Jadi kecepatan laju sepeda motor listrik tanpa beban pada kecepatan kedua adalah 18,648 km / jam.
ϖ Kecepatan 3 tanpa beban
Dengan diketahui kecepatan poros adalah 2601 rpm • Menghitung kecepatan dalam rotasi / detik
Kec. = rotasi/menit : 60 Kec. = 2601 : 60
= 43,35 rotasi / detik
Ini adalah kecepatan putar poros motor listrik. • Menghitung kecepatan putar roda
Kec. Putar roda = Kec. Putar poros
Rumus yang didapat ini dikarenakan perbandingan gerigi poros dengan gerigi roda adalah 11 berbanding 55. Maka kecepatan putar roda adalah sebagai berikut.
= 8,67 rotasi / detik
Jadi kecepatan putar roda adalah 8,67 rotasi / detik. Dengan diketahuinya kecepatan putar roda maka dapat menghitung kecepatan sepeda motor saat melaju dijalan dengan mengetahui keliling roda.
• Menghitung keliling roda
Karena roda berbentuk bulat / lingkaran maka kita dapat menggunakan rumus lingkaran untuk menghitung keliling roda.
K = 2 r atau d Keterangan K = keliling lingkaran r = jari-jari lingkaran d = diameter lingkaran maka, K = 3,14 . 29,6 = 92,94 cm = 0,93 m
Jadi keliling roda belakang sepeda motor listrik tersebut adalah 0,93m. • Menghitung kecepatan motor listrik saat melaju
.
Keterangan
= kecepatan laju sepeda motor listrik
K = keliling roda
Maka, Vsepeda = 0,93 meter . 8,67 rotasi / detik
= 8,063 meter / detik
= 29,120 km / jam
Jadi kecepatan laju sepeda motor listrik pada kecepatan ketiga tanpa beban adalah 29,120 km / jam.
Dengan hasil pengukuran diatas maka diperoleh table berikut.
Tabel 4.3 Kecepatan Laju Sepeda Motor Listrik
Tingkat laju kecepatan motor listrik
Putaran pulley motor DC tanpa beban dalam
rpm
Kecepatan laju sepeda motor listrik
tanpa beban
Kecepatan 1 (12 V) 864 9,648 km / jam
Kecepatan 2 (24 V) 1675 18,648 km / jam
Kecepatan 3 (36 V) 2601 29,120 km / jam
4.3 Pengujian Pengisian Baterai
Pengujian pengisian baterai bertujuan untuk mengetahui berapa lama waktu
yang diperlukan untuk mengisi accumulator hingga terisi penuh.
Langkah–langkah pengujian pengisian baterai adalah sebagai berikut.
1. Menyiapakan alat dan bahan yang akan digunakan dalam percobaan, yaitu
charger 10 Ampere, Ampere meter, alat indikator pengisian baterai,
stopwatch dan baterai yang ada di dalam sepeda motor listrik.
3. Memasangkan alat indikator pengisian baterai secara paralel dengan baterai yang akan diuji.
4. Menghidupkan stopwatch sesaat setelah semuanya dirangkai. 5. Mencatat hasil pengukuran dengan tabel.
Tabel 4.4 Waktu Pengisian Baterai sampai Penuh
Jumlah baterai yang diisi
Tegangan pengisian Dalam Volt
Waktu saat baterai terisi penuh dalam
detik Arus pengisian ( Ampere ) 1 13,2 1980 8,8 2 25,1 2076 8,5 3 38,4 2110 8,3
4.4 Jarak dan Waktu Tempuh Sepeda Motor Listrik
Pengujian sepeda motor listrik ini dilakukan di alun-alun wonosobo yang berbentuk persegi panjang yang memiliki panjang 246 meter dan lebar 198 meter dengan keliling 888 meter. Pengujian dilakukan dengan menaiki sepeda motor listrik dengan beban 60 kg ccdan mengikuti jalur luar dari alun-alun wonosobo tersebut.
Langkah-langkah dalam pengujian daya tempuh sepeda motor listrik adalah sebagai berikut.
1. Menyiapkan alat dan bahan yang akan digunakan dalam percobaan, yaitu meteran (alat pengukur jarak dalam meter) dan sepeda motor listrik yang akan diuji.
2. Mengukur panjang dan lebar alun-alun wonosobo yang berbentuk persegi panjang.
3. Pengukuran dilakukan dengan beberapa variasi kecepatan, yaitu pada tegangan 12 volt kemudian 24 volt serta 36 volt.
4. Mencatat berapa kali putaran sepeda motor listrik memutari alun-alun wonosobo.
Dengan menguji sepeda motor listrik diperoleh data pengukuran jarak tempuh sepeda motor listrik saat baterai terisi penuh sebagai berikut.
Tabel 4.5 Jarak dan Waktu Tempuh Sepeda Motor Listrik
Tingkat laju kecepatan motor listrik Jarak tempuh Jarak ( meter ) Waktu ( detik ) Kecepatan 1 (12 V) 15 putaran + 54 meter 13.374 5.237 Kecepatan 2 (24 V) 29 putaran + 129 meter 25.881 5.305 Kecepatan 3 (36 V) 47 putaran + 810 meter 42.546 5.380 4.5 Pembahasan
Berdasarkan hasil pengujian alat, baik pengujian tiap diagram kotak maupun keseluruhan maka dapat diuraikan beberapa permasalahan yang berhubungan dengan alat sebagai berikut ini:
1. Pembahasan pengisian baterai
Baterai memiliki kapasitas 3,5 Ah. Padahal waktu pengisian, secara teori
charger memberikan arus sebesar 10 Ampere sesuai yang tertera dalam kemasan
transformator. Perhitungan secara teori adalah sebagai berikut. • Menghitung waktu penuh baterai
t = kapasitas baterai : I
Keterangan
t = waktu pada saat baterai terisi penuh
I = Arus yang mengalir ke baterai
t = 3,5 : 10 A
= 0,35 jam
= 1260 detik
Jadi waktu yang diperlukan untuk mengisi baterai hingga penuh menurut teori adalah 0,35 jam atau 1260 detik, namun dalam kenyataannya waktunya berbeda yaitu rata-rata 2000 detik.
Hasil pengukuran secara teori dan kenyataan berbeda. Ini disebabkan oleh beberapa faktor berikut.
1. Transformator tidak ideal.
2. Resistansi dalam baterai makin lama makin besar
3. Ada kebocoran arus di dalam transformator sehingga arus yang dikeluarkan tidak sama dengan yang tertera pada transformator.
5. Adanya beban yang dapat menurunkan arus maupun tegangan keluaran
charger.
2. Pembahasan Jarak Maksial Sepeda Motor Listrik
Keadaan baterai terisi penuh memiliki kapasitas 3,5 Ah, yang artinya baterai memiliki cadangan energi listrik 3,5 ampere dalam satu jam. Padahal rata-rata arus yang digunakan pada motor listrik sebesar 2 ampere. Jadi perhitungannya adalah sebagai berikut.
• Menghitung waktu habis baterai bila digunakan terus menerus.
Waktu habis baterai = kapasitas baterai : arus rata-rata = 3,5 Ah : 2 A
= 1,75 jam
Jadi waktu habis baterai digunakan terus menerus adalah 1,75 jam. Maka dapat dihitung secara manual berapa jauh jarak maksimum yang dapat ditempuh sepeda motor listrik pada keadaan kecepatan 1, kecepatan 2 dan kecepatan 3.
• Pada kecepatan 1
Jarak max = kecepatan 1 . waktu habis baterai = 9,648 km / jam . 1,75 jam
= 16,884 km
Jadi jarak maksimum yang bisa ditempuh sepeda motor listrik ini adalah 16.884 meter, tetapi dalam kenyataannya jarak yang ditempuh sepeda motor listrik ini adalah 13.374 meter.
• Pada kecepatan 2
Jarak max = kecepatan 2 . waktu habis baterai = 18,648 km / jam . 1,75 jam
= 32,624 km
= 32.624 m
Jadi jarak maksimum yang bisa ditempuh sepeda motor listrik ini adalah 32.624 meter, tetapi dalam kenyataannya jarak yang ditempuh sepeda motor listrik ini adalah 25.881 meter.
• Pada kecepatan 3
Jarak max = kecepatan 3 . waktu habis baterai = 29,1201 km / jam . 1,75 jam
= 50,960175 km
= 50.960,175 m
Jadi jarak maksimum yang bisa ditempuh sepeda motor listrik ini adalah 50.960,175 meter, tetapi dalam kenyataannya jarak yang ditempuh sepeda motor listrik ini adalah 42.546 meter.
Tabel 4.6 Perbandingan Jarak Tempuh
Tingkat Kecepatan Perhitungan (meter) Kenyataan (meter) Waktu ( detik ) Kecepatan 1 (12 V) 16.884 13.374 5.237 Kecepatan 2 (24 V) 32.624 25.881 5.305 Kecepatan 3 (36 V) 50.960,175 42.546 5.380
Grafik hubungan waktu dengan jarak yang ditempuh secara perhitungan dan kenyataan diperlihatkan pada Gambar 4.2.
Gambar 4.3 Grafik Hubungan Tingkat Kecepatan dengan Jarak yang Ditempuh Hasil pengukuran secara teori dan kenyataan berbeda. Ini disebabkan oleh beberapa faktor berikut. Antara lain:
1. Faktor beban 0 10000 20000 30000 40000 50000 60000 0 1 2 3 4 jarak tempuh sepeda motor listrik (m) tingkat kecepatan Perhitungan (meter) Kenyataan (meter)
2. Faktor jalan yang tidak rata 3. Daya yang hilang di rantai
3. Pembahasan Kecepatan Sepeda Motor Listrik
Disini akan dibahas mengenai kecepatan sepeda motor listrik berbeban dan
tanpa beban. Dari hasil penelitian diatas dapat dihitung kecepatan sepeda motor listrik rata-rata dengan mengetahui jarak dan waktu yang ditempuh.
ϖ Menghitung kecepatan rata-rata sepeda motor listrik • Kecepatan 1 (12 Volt) berbeban
V =
Keterangan
V = kecepatan sepeda motor listrik
s = jarak yang ditempuh sepeda motor listrik
t = waktu untuk menempuh jarak tersebut
V
=
..
= 2,553 m/detik
Jadi kecepatan sepeda motor listrik berbeban pada kecepatan 1 (12 Volt) adalah 2,553 m/detik.
• Kecepatan 2 (24 Volt) berbeban
V =
Keterangan
s = jarak yang ditempuh sepeda motor listrik
t = waktu untuk menempuh jarak tersebut
V
=
..
= 4,878 m/detik
Jadi kecepatan sepeda motor listrik berbeban pada kecepatan 2 (24 Volt) adalah 4,878 m/detik.
• Kecepatan 3 (36 Volt) berbeban
V =
Keterangan
V = kecepatan sepeda motor listrik
s = jarak yang ditempuh sepeda motor listrik
t = waktu untuk menempuh jarak tersebut
V
=
..
= 7,908 m/detik
Jadi kecepatan sepeda motor listrik berbeban pada kecepatan 3 (36 Volt) adalah 7,908 m/detik.
Tabel 4.7 Perbandingan Kecepatan Sepeda Motor Listrik
Tingkat kecepatan
Kecepatan tanpa beban meter/detik Kecepatan berbeban meter/detik Kecepatan 1 2,68 2,553 Kecepatan 2 5,18 4,878 Kecepatan 3 8,063 7,908
Grafik hubungan tingkat kecepatan dengan kecepatan tanpa beban dan berbeban diperlihatkan pada Gambar 4.3.
Gambar 4.4 Grafik Hubungan Tingkat Kecepatan dengan Kecepatan Sepeda Motor Listrik berbeban dan tanpa beban
0.00 1.00 2.00 3.00 4.00 5.00 6.00 7.00 8.00 9.00 0 1 2 3 4 kecepatan sepeda motor listrik (m/s) tingkat kecepatan Kecepatan tanpa beban meter/detik Kecepatan berbeban meter/detik
Perbedaan kecepatan sepeda motor listrik secara perhitungan dan kenyataan berbeda. Ini dikaranakan oleh beberapa faktor berikut:
1. Faktor jalan yang tidak rata 2. Faktor beban
55
BAB V PENUTUP
5.1 Kesimpulan
Dari hasil pengujian dan pembahasan data yang diperoleh maka dapat diambil kesimpulan sebagai berikut :
1. Dari hasil pengamatan secara keseluruhan, maka sepeda motor listrik ini akan bekerja dengan baik untuk digunakan pada daerah yang cukup datar.
2. Sepeda motor listrik ini memiliki tiga tingkat kecepatan
a. Laju kecepatan 1 memiliki kecepatan maksimal 2,68 meter/detik. b. Laju kecepatan 2 memiliki kecepatan maksimal 5,18 meter/detik. c. Laju kecepatan 3 memiliki kecepatan maksimal 8,063 meter/detik.
3. Jarak tempuh maksimal dari sepeda motor listrik ini adalah 42.546 meter dengan beban 60 kg untuk tiga buah baterai.
4. Pada kecepatan tinggi menghasilkan jarak tempuh yang lebih tinggi, karena baterai yang digunakan lebih banyak.
5. Waktu pengisian baterai sampai terisi penuh adalah 2000 detik atau sekitar 33 menit
5.2 Saran
1. Perlu ditambahkan transmisi gigi untuk meringankan kinerja motor listrik. 2. Untuk mendapat penerangan di malam hari, sepeda motor listrik ini dapat
56
3. Untuk meringankan kerja motor listrik, maka sebelum handel gas diputar, sebaiknya sepeda digayuh terlebih dahulu.
4. Disarankan yang memakai sepeda motor listrik ini memiliki berat dibawah 80 kg.