SISTEM KENDALI PENJEJAK SINAR MATAHARI
DUA LINTASAN KEBEBASAN BERBASIS
MIKROKONTROLER AT89C51
Joko Purwono, Muchlas, Tole Sutikno
Program Studi Teknik Elektro, Fakultas Teknologi Industri, Universitas Ahmad Dahlan Kampus III Jln. Prof. Dr. Soepomo, Janturan, Yogyakarta 55164, Telp. 379418 Ext. 220
email: [email protected], [email protected]
Abstract
Instalation of solar cell panels permanently will not get maximum power point tracker (MPPT). To get the MPPT, the controlling of solar cell panels are needed in order to follow the direction of sun. In this paper, the design of control system of solar panel that capable to control of solar panel with 2 freedom track based on AT89C51 microcontroller is described. The movement is movement from east to west according to the earth rotation and movement from north to south in according to the earth revolution to get the MPPT. As a result, the prototype of design system has capable to control motor drive of solar cell panel, both automatically and manually with 2-line track to get MPPT.
Keywords: MPPT, solar cell, microcontroller, AT89C51, motor
Abstrak
Panel sel surya yang dipasang secara permanen tidak akan mendapatkan penjejakan titik daya maksimum. Agar dapat menghasilkan titik daya secara maksimum, panel sel surya perlu dikendalikan mengikuti arah pergerakkan matahari. Pada paper ini akan dideskripsikan rancangan sistem yang mampu mengendalikan panel surya dengan 2 lintasan kebebasan berbasis mikrokontroler AT89C51, yaitu pergerakan arah timur ke barat sesuai rotasi bumi dan pergerakan arah utara ke selatan sesuai revolusi bumi untuk mendapatkan penjejakan titik daya maksimum. Hasil penelitian menunjukkan bahwa purwarupa sistem yang dirancang, mampu mengendalikan kemudi motor pada panel sel surya, baik secara otomatis maupun manual dengan 2 lintasan edar untuk mendapatkan penjejakan titik daya maksimum.
Kata kunci: titik daya maksimum, panel sel surya, mikrokontroler, AT89C51, motor
1. PENDAHULUAN
Pada tahun-tahun terakhir ini, sumber energi mulai menjadi permasalahan umat. Banyak eksploitasi dan perhatian penelitian diarahkan pada ditemukannya sumber energi baru. Tak terkecuali, sumber energi matahari menjadi objek penelitan yang kian menarik banyak perhatian. Sel surya merupakan salah satu alternatif alat yang mampu mengubah energi sinar matahari menjadi energi listrik. Saat ini pemasangan panel sel surya masih banyak dilakukan secara permanen (fixed), sehingga kurang efisien dan fleksibel dalam penerimaan intensitas sinar matahari terbesar [1-5].
demikian, untuk mendapatkan intensitas sinar matahari secara maksimal dapat dilakukan dengan penjejakan dua lintasan edar, yaitu dari arah timur ke barat dan arah utara ke selatan.
Piao, et.al [3] pada penelitiannya telah berhasil meningkatkan keluaran daya panel sel surya 21% lebih tinggi dengan sistem penjejakan 1 lintasan edar dibandingkan dengan sistem pemasangan panel surya secara permanen. Sedangkan Abu dan Asghar [5], telah mengembangakan 2 algoritma penjejakan yang disebut Perturb and Observation (PAO) dan
Maximum Power Point Voltage (MPPV) untuk meningkatkan keluaran daya panel surya. Namun kedua metode ini relatif kompleks. Pada penelitian ini, dikembangkan metode penjejakan sinar matahari yang simple dengan 2 lintasan kebebasan, yaitu: pergerakan lintasan edar Timur ke Barat menggunakan mode otomatis dengan membandingkan masukan sensor berbasis mikrokontroler AT89C51, sedangkan pergerakan lintasan edar Utara ke Selatan menggunakan
modemanual dengan lintasan yang telah ditentukan sesuai gerak semu tahunan matahari.
2. METODE PENELITIAN
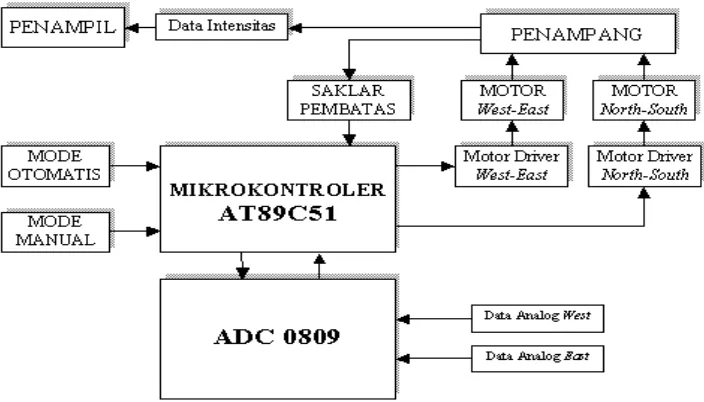
Secara umum blok diagram rancangan penjejakan sinar matahari dua lintasan kebebasan ditunjukkan pada Gambar 1 dan diagram alir program utama sistem penjejak dua lintasan kebebasan ditunjukkan pada Gambar 2.
Gambar 1. Blok diagram penjejakan sinar matahari dua lintasan kebebasan
2.1. Pengambilan data analog
Pengambilan data-data dalam bentuk analog (data_west, dan data_east) dilakukan secara bergantian dikendalikan ADC0809 oleh multiplekser sesuai alamat yang dipilih dengan
address decoder di alamat Add A, Add B, atau Add C. Pada pengambilan data-data analog ini digunakan channel IN0 untuk data analog west dan IN1 untuk data analog east. Dari kedua sensor tersebut mempunyai gambar rangkaian yang sama. Rangkaian dari pengambilan data-data analog ditunjukkan pada Gambar 3.
2.2. Rangkaian ADC0809
Rangkaian ADC0809 ini menggunakan port 0 untuk masukan data (D0-D7) ke mikrokontroler dan untuk port kendali ADC menggunakan port 1 dari mikrokontroler. Dengan tegangan Vcc dan Vref ADC=5V dan 8 channel masukan analog, dalam perancangan ini cukup membutuhkan 2 channel masukan analog yaitu AN0: data analog west dan AN1: data analog
28=256 step. Sehingga resolusi ADC tersebut adalah 5Volt/256=19,53mV atau mendekati 20mV.
Gambar 2. Diagram alir program utama penjejak dua lintasan kebebasan
Data Analog_East LDR_West
LDR_East
VR2 50K 5V
VR1 50K
Data Analog_West
Gambar 3. Pengambilan data-data analog sensor LDR
Konversi Analog_West
Simpan RAM_West
Konversi Analog_East
Simpan RAM_East
Limit East = 0
RAM_West > RAM_East
RAM_West < RAM_East
DIAM
Putar East
Putar West
T
T T
Y Y
Y
RAM_West = RAM_East
Limit West = 0
CEK STATUS
=1
MANUAL
Y T
STATUS MODE=0
STATUS MODE=1
Y T
T
Y
2.3. Proses konversi analog
Seperti pada diagram alir, eksekusi akan dimulai dengan pemilihan alamat multiplekser ADC, Memberikan sinyal perubahan dari logika ‘0’ ke logika ‘1’ pada ALE (Address Latch Enable) kemudian untuk memulai konversi dengan memberikan sinyal di kaki start 0-1-0 atau write 1-0-1 dan proses konversi selesai jika EOC terdapat perubahan dari logika 0 ke logika 1. Untuk membaca keluaran dengan memberikan logika 1 pada kaki OE (Output Enable), untuk meyimpan hasil konversi dapat digunakan RAM Internal keperluan umum 30H hingga 7FH. Disini menggunakan RAM 30H untuk data west, dan 31H untuk data east.
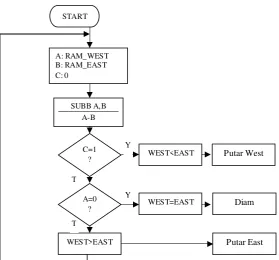
2.4. Proses pembanding data
Pada proses penjejakan masukan sensor akan selalu berubah-ubah hingga masukan tersebut mempunyai nilai selisih mendekati atau sama dengan nol, untuk mencapai selisih atau dapat disebut eror sekecil mungkin maka sensor penampang harus bergerak hingga mencapai titik tengah dari sumber cahaya. Proses pembanding data mempunyai sebuah alur, yaitu pembanding data west_east. Untuk hasil keputusan arah putar motor maka data RAM_West
dan data RAM_East harus diperbandingkan yaitu dengan memberikan instruksi SUBB, jika hasil pengurangan tersebut melimpah (nilainya kurang dari 0), maka bit carry akan bernilai ‘1’ dan
west<east apabila tidak maka bit carry berisi ‘0’. Ketika bit carry ‘0’ apakah A=B atau hasil pengurangan 0, maka motor akan diam dan jika tidak maka west>east. Diagram alir pembanding (compare) data masukan ditunjukkan pada Gambar 4.
Gambar 4. Diagram alir pembanding (compare) data masukan
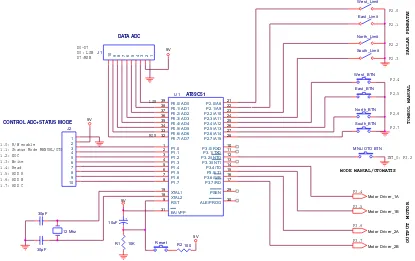
2.5. Rangkaian Pengendali Berbasis Mikrokontroler AT89C51
Rangkaian pengendali sistem penjejak matahari berbasis mikrokontroler AT89C51 yang digunakan pada penelitian ini ditunjukkan pada Gambar 5.
2.6. Tombol otomatis dan eksekusi manual
Secara normal alat penjejakan ini berjalan dengan mode otomatis, dimana seluruh fungsi dari sistem dilakukan secara otomatis. Meskipun alat ini mampu bekerja secara otomatis, alat ini juga menyediakan fasilitas penjejakan secara manual. Fasilitas mode manual ini untuk melakukan pergerakan lintasan arah utara ke selatan dengan lintasan yang telah ditentukan
START
A: RAM_WEST B: RAM_EAST C: 0
SUBB A,B A-B
C=1 ?
A=0
? WEST=EAST
WEST>EAST
WEST<EAST
T
Y Y
T
Putar West
Diam
sesuai gerak semu tahunan matahari. Dalam eksekusi manual terdapat 4 eksekusi arah yaitu Timur, Barat, Utara dan Selatan.
South_BTN
U 1 AT89C51
9
Motor Driv er_1B
5V
P1.0: R/W enable P1.1: Status Mode MANUAL/OTO P1.2: EOC
Motor Driv er_2A
P2.5
Motor Driv er_1A East_Lim it
CONTROL ADC+STATUS MODE
1
Motor Driv er_2B West_BTN
Gambar 5. Rangkaian pengendali berbasis AT89C51
Pada alur penjejakan, dua lintasan kebebasan yang mempunyai dua lintasan edar sehingga setiap scan button akan mengecek kombinasi tombol yang sedang aktif. Sebagai contohnya: jika lintasan west_east tombol east aktif dan lintasan north_south tombol north aktif, maka setelah digunakan metode scan data akan dihasilkan nilai kombinasi sesuai dalam Tabel 1. Eksekusi north_east dengan kombinasi bit 1001 biner (90H) akan mampu mengeksekusi dua lintasan edar sekaligus.
Tabel 1. Kombinasi tombol eksekusi manual
2.7. Saklar pembatas
Saklar Normally Open (NO) yang berfungsi pembatas posisi maksimal atau minimal penampang saat motor melakukan gerakan penjejakan sehingga kondisi penampang sel surya lebih aman dan beredar pada daerah yang telah ditentukan.
2.8. Arah putar motor dan pengecekan saklar pembatas penampang
Subrutin arah putar motor akan dieksekusi oleh subrutin scan button pada mode manual, ataupun setelah proses compare (pembanding) data pada mode otomatis. Pengarah gerakan motor akan mengecek kondisi limit (saklar pembatas penampang) pada setiap melakukan arah putar. Ketika kondisi limit aktif, maka arah putar akan berhenti dan kembali pada subrutin awal sesuai Tabel 2.
Tabel 2. Kombinasi Motor Output
East West Eksekusi arah South North Eksekusi arah
0 0 Diam 0 0 Diam
0 1 West 0 1 North
1 0 East 1 0 South
1 1 Diam 1 1 Diam
3. HASIL DAN PEMBAHASAN
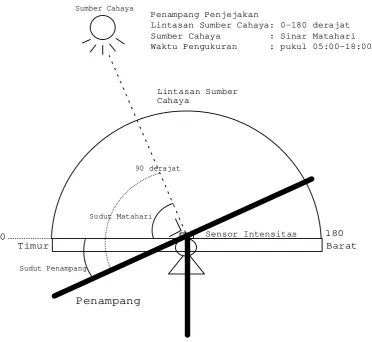
Pemasangan penampang menggunakan penjejakan dua lintasan kebebasan
Sudut Penampang
Sudut Matahari 90 derajat
Lintasan Sumber Cahaya
Sumber Cahaya
Barat Timur
Sensor Intensitas
0
Penampang
Penampang Penjejakan
Lintasan Sumber Cahaya: 0-180 derajat Sumber Cahaya : Sinar Matahari Waktu Pengukuran : pukul 05:00-18:00
180
Lintasan Sumber Cahaya
113.5
Sumber Cahaya
Selatan
Penampang Utara
66.5
Garis Balik Utara Garis Balik Selatan
23.5LU
Sensor Intensitas
23.5LS
Lintasan Sumber Cahaya: 66.5-113.5 derajat Sumber Cahaya : Sinar Matahari
Gambar 7. Pergerakan penjejakan lintasan arah Utara ke Selatan
Tabel 3. Perhitungan keoptimalan penjejakan pada sudut penampang terhadap sudut sinar matahari
Optimal Sudut Penyinaran Matahari
(lintasan) Sudut Penampang (lintasan)
M - P=90°
~ 90 90
0 90 90
10 79 89
22 68 90
40 49 89
53 37 90
62 27 89
80 10 90
95 5 90
115 24 91
130 41 89
148 58 90
160 72 88
171 80 91
180 90 90
~ 90 90
Sudut penyinaran matahari :
∠
M Sudut penampang :∠
PJika diharapkan sebuah penampang mampu menerima sinar tegak lurus: 90° Maka
∠
M -∠
P = 90°Keoptimalan pada alat penjejakan ini dapat diketahui dengan memperhitungkan sudut matahari dengan sudut penampang yang telah mendekati atau sama dengan 90°, yaitu akan sudut penampang akan tegak lurus terhadap sudut sinar datang. Hasil perhitungan dapat dilihat pada Tabel 3. Dari data pada Tabel 3 tersebut terlihat bahwa nilai kesalahan pada penjejakan ini adalah maksimal 2° tegak lurus terhadap sudut sinar datang.
4. SIMPULAN
Paper ini telah mendeskripsikan rancangan sistem yang mampu mengendalikan panel surya dengan 2 lintasan kebebasan berbasis mikrokontroler AT89C51, yaitu pergerakan arah timur ke barat sesuai rotasi bumi dan pergerakan arah utara ke selatan sesuai revolusi bumi untuk mendapatkan penjejakan titik daya maksimum. Hasil penelitian menunjukkan bahwa purwarupa sistem yang dirancang, mampu mengendalikan kemudi motor pada panel sel surya, baik secara otomatis maupun manual dengan 2 lintasan edar untuk mendapatkan penjejakan titik daya maksimum.
DAFTAR PUSTAKA
[1]. A. K. Saxena and V. Dutta, "A versatile microprocessor based controller for solar
tracking" in Photovoltaic Specialists Conference, 1990., Conference Record of the Twenty
First IEEE, 1990, pp. 1105-1109 vol.2.
[2]. H. Chihchiang and S. Chihming, "Comparative study of peak power tracking techniques
for solar storage system", in Applied Power Electronics Conference and Exposition, 1998.
APEC '98. Conference Proceedings 1998., Thirteenth Annual, 1998, pp. 679-685 vol.2. [3]. Z. G. Piao, J. M. Park, J. H. Kim, G. B. Cho, and H. L. Baek, "A study on the tracking
photovoltaic system by program type", in Electrical Machines and Systems, 2005.
[4]. S. Armstrong and W. G. Hurley, "Self-regulating maximum power point tracking for
solar energy systems", in Universities Power Engineering Conference, 2004. UPEC 2004.
39th International, 2004, pp. 604-609 vol. 1.
[5]. T. Abu and Asghar, M.S.J., “Development of microcontroller-based maximum power