PENGENALAN OBJEK BOLA TENNIS PADA ROBOT HUMANOID SOCCER
DENGAN SENSOR KAMERA HAVIMO2
PROPOSAL
Proyek Akhir
Diajukan kepada Fakultas Teknik Universitas Negeri Yogyakarta Untuk Memenuhi Sebagai Persyaratan
Guna Memperoleh Gelar Ahli Madya
Oleh:
Herianto
NIM. 06518244009
P
ENDIDIKAN TEKNIK MEKATRONIKA
FAKULTAS TEKNIK
UNIVERSITAS NEGERI YOGYAKARTA
PERSETUJUAN
Proyek akhir yang berjudul“SENSOR KAMERA HAVIMO2 PADA ROBOT HUMANOID SOCCER” ini telah disetujui pembimbing untuk diajukan.
Yogyakarta, juni 2011
Pembimbing
Herlambang sigit P .ST
SURAT PERNYATAAN
Dengan ini saya menyatakan bahwa tugas akhir ini benar-benar karya saya sendiri. Sepanjang pengetahuan saya tidak terdapat karya atau pendapat yang ditulis atau diterbitkan orang lain kecuali sebagai acuan atau kutipan dengan mengikuti tata penulisan karya ilmiah yang telah lazim.
Yogyakarta, Juli 2011 Yang menyatakan,
SENSOR KAMERA HAVIMO2 PADA ROBOT HUMANOID SOCCER
Herianto
06518244009
A.
Latar belakang Masalah
Dewasa ini, perkembangan teknologi robot berjalan sangat cepat. Robot diciptakan karena robot diharapkan dapat membantu manusia mengerjakan pekerjaan yang memerlukan ketelitian dan ketepatan tinggi. Bahkan robot diciptakan agar dapat menggantikan manusia untuk melakukan pekerjaan yang memerlukan kecepatan tinggi atau pekerjaan manusia yang beresiko tinggi (pekerjaan yang dapat menyebabkan kematian). Perkembangan robot yang mendapat perhatian paling besar oleh dunia akhir-akhir ini adalah robot manusia atau yang lebih dikenal dengan sebutan humanoid robot. Manusia berusaha untuk menciptakan robot yang memiliki kecerdasan dan kemampuan yang mendekati manusia.
Robot didesain agar mampu bergerak seperti layaknya seorang manusia dan robot juga didesain agar dapat berpikir dan mengambil suatu keputusan sendiri.
menentukan titik tengah dari objek yang terdeteksi. Informasi lokasi titik tengah pada objek merupakan informasi navigasi sehingga menghasilkan kondisi kondisi yang direspon oleh robot dengan cara bergerak ke arah objek tersebut.
B.Identifikasi Masalah
Berdasarkan permasalahan yang muncul pada latar belakang masalah, maka dapat diidentifikasikan beberapa permasalahan yaitu :
1. Perancangan interfacing kamera Havimo2 dengan robot humanoid
2. Pemograman dan Pengolahan Data sensor yang nanti nya sebagai keputusan pada robot humanoid
3. Perancangan algoritma pada robot humanoid
Pada akhir nya nanti Penggunaan sensor kamera ini dapat digunakan sebagai media pembelajaran mata kuliah robotika.
C.Batasan Masalah
Pembuatan tugas akhir ini dibatasi pada unjuk kerja prototype Robot humanoid dengan Sensor kamera Havimo2 adalah sebagai media pembelajaran pada mata kuliah robotika. Dengan batasan masalah :
a. Perumusan algoritma kamera pada saat mendeteksi bola dan gawang yang warna nya hampir serupa pada lapangan pertandingan robot.
D. Rumusan Masalah
1. Bagaimana interfacing sensor kamera pada robot humanoid? 2. Bagaimana pemrosesan data kamera pada robot humanoid?
E.Tujuan
Tujuan yang ingin dicapai dalam pembuatan Proyek Akhir ini adalah :
1. Membuat rancangan dan interfacing sensor kamera Havimo2 pada robot humanoid yang dikendalikan secara otomatis,ketika mendeteksi bola dan menendang bola.
2. Membuat rancangan sofware yang akan di gunakan oleh robot humanoid dengan sensor kamera havimo2 yang nanti di kendalikan secaraa otomatis dapat mendeteksi bola dan menendang ke arah gawang .
3. Mengetahui unjuk kerja robot humanod soccer berbasi sensor kamera Havimo2 yang dikendalikan secara otomatis ketika mencari bola dan menendang ke arah gawang.
F. Manfaat
Pembuatan tugas akhir ini diharapkan dapat memberikan manfaat bagi : 1. Institusi/ Perguruan Tinggi
Prototipe robot ini dapat dijadikan sebagai :
a. Media dalam proses belajar-mengajar robotika.
b. Menambah referensi tentang teknologi robotika bagi mahasiswa teknik elektro dan Mekatronika.
c. Mengembangkan teknologi robotik. 2. Mahasiswa
Prototipe ini dapat dipakai sebagai :
a. Sumber informasi dan referensi dalam rangka pengembangan ilmu pengetahuan dan teknologi robotika yang dewasa ini berkembang pesat. b. Media yang dapat membantu mahasiswa dapat mengaplikasikan teori yang
sudah didapat dan mengembangkan kemampuan dalam bidang robotika c. Dapat sebagai alat praktek secara langsung dalam pengembangan ilmu
pengetahuan dan teknologi robotika 3. Industri
a. Dapat tercipta suatu alat yang dapat membantu mengembangkan dan meningkatkan produktifitas produk suatu industri.
b. Dapat meningkatkan efisiensi waktu kerja dan juga meningkatkan kualitas dan kuantitas produk yang dihasilkan.
G.Keaslian
Proyek ini diilhami oleh karya Robot Humanoid soccer Al-Aadiyat 2011. milik Universitas Negeri yogyakarta. Robot tersebut terdiri dari sistem mekanik, sistem elektronis serta program sehingga robot dapat berjalan sebagaimana fungsinya.
Memakai prinsip yang sama, maka dikembangkan agar robot humanoid tersebut dapat mendeteksi bola dengan sensor kamera dan menggunakan data kamera tersebut untuk mendetesi gawang gan menedang bola ke arah gawang .
H. Gagasan Rancangan
Sensor kamera Havimo2 ini nanti nya akan di tempatkat pada kepala pada robot humanoid , proses interfacing kamera dan algoritma kamera akan dilakukan berulang ulang dengan proses framing data pada robot humanoid dengan bantuan PC computer. Robot humanoid ini nanti nya akan memperoleh data dari kamera Havimo2 dan akan meproses data dari kamera tesebut dan nanti nya data yang di dapat akan di olah oleh robot humanoid untuk menentukan keputusan.
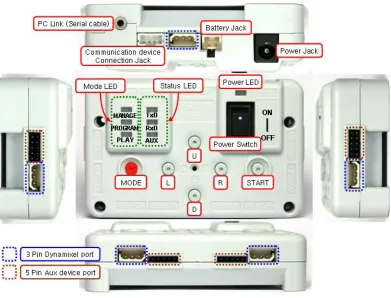
Berikut Gambar CM510 Kontroller tersebut :
Gambar 1. CM510 Kontroller . Berikut Gambar sensor kamera Havimo2 :
I .RENCANA KERJA
Untuk merealisasikan sensor kamere havimo2 pada robot humanoid ini penulis mengacu pada pengalaman kerja praktek, dan teori yang diperoleh selama kuliah serta referensi bacaan di perpustakaan. Adapun langkah-langkah yang dilakukan sebagai berikut
1. Studi Kepustakaan
Dengan mencari dan mempelajari buku-buku yang berkaitan dengan karya yang dibuat meliputi Bahasa C, PCB express ,codevisionavr , teknik interface dan referensi lainnya di beberapa tempat baik di kampus, perpustakaan daerah maupun internet.
2. Konsultasi
Dilakukan dengan berkonsultasi terhadap dosen pembimbing dan dosen kinnya yang kompeten pada bidang yang dipelajari secara rutin dan berkala dalam menyelesaikan berbagai macam permasalahan yang dihadapi pada saat pembuatan perangkat lunak maupun instalasi perangkat keras.
3. Penelitian Laboratorium
K. Perkiraan Biaya yang dibutuhkan :