PROSIDING
SEMINAR NASIONAL
TEKNOLOGI INFORMASI DAN APLIKASINYA
POLITEKNIK NEGERI MALANG
MALANG, 12-13 MARET 2009
ISSN : 9772085234007
EDITOR
M. Sarosa, Ika Noer S., Ratna Ika, Mila Fauziyah,
M. Junus, M. Noor H, A. Faizin, M. Nanak, Windi Z., Yoyok H.
Diorganisasi oleh:
DEWAN REDAKSI
KETUA
Dr. M. Sarosa, Dipl. Ing., MT.
REVIEWER/KOMITE PROGRAM
Prof. Dr. Ing. Ir. Adang Suwandi Ahmad (ITB)
Prof. Dr. Ir. Sudjito (Unibraw)
Dr. Ir. Agnes Hanna P., MT. (Polinema)
Dr. Ir. R. Edy Purwanto, MSc. (Polinema)
Dr. M. Sarosa, Dipl. Ing., MT. (Polinema)
Dr. Agung Darmawansyah, ST. MT. (Unibraw)
Achmad Chumaidi, Ir. MT. (Polinema)
Ludfi Djajanto, Drs. MBA. (Polinema)
Rulirianto, Drs. MSc. (Polinema)
KOMITE OGRANISASI
Supriatna Adhisuwignjo, ST., MT
Ika Noer Syamsiana, ST., MT
Ratna Ika Putri, ST., MT
Mila Fauziyah, ST., MT
M. Junus, ST. MT
Mohammad Noor H., ST., MSc.
Azam Muzakhim I, ST. MT.
Akhmad Faizin, Dipl. Ing.HTL., MT.
Deddy Kusbianto, PA. Ir.
M. Nanak Zakaria, ST., MT
M. Zenurianto, Dipl. Ing.HTL, MSc.
Windi Zamrudy, B. Tech., MPd.
Yoyok Heru P, Drs., MT
Prosiding SENTIA 2009 ± Politeknik Negeri Malang
Aplikasi Jaringan Syaraf Tiruan Model
Adaptive Resonance Theory 1
pada
Sistem Identifikasi Pesawat Terbang
Nur Ichsan Utama 1, Arwin Datumaya Wahyudi Sumari 2, Aciek Ida Wuryandari 3
1,2,3Sekolah Teknik Elektro dan Informatika, Institut Teknologi Bandung Labtek VIII, Institut Teknologi Bandung, Jl. Ganesha 10, Bandung ± 40132
2 Departemen Elektronika, Akademi Angkatan Udara Indonesia, Jl. Laksda Adisutjpto, Yogyakarta ± 55002
[email protected] 1, [email protected] 2, [email protected] 3
ABSTRAK
Radar memancarkan gelombang elektromagnetik mendapatkan data-data yang berkaitan dengan pesawat terbang yang meliputi jarak, ketinggian, arah dan kecepatan. Untuk identifikasi, radar dilengkapi dengan peralatan
interogatorIdentification Friend or Foe (IFF) sebagai bagian dari Secondary Surveillance Radar (SSR). Interogator
IFF mengirimkan sinyal pertanyaan kepada pesawat terbang yang ingin diidentifikasi. Pesawat terbang yang dilengkapi dengan transponder (transmitter responder) akan menjawab sinyal pertanyaan tersebut secara otomatis berupa kode identifikasi pesawat. Bila pesawat tidak dapat merespon pertanyaan yang diberikan, maka pesawat akan diidentifikasikan sebagai penerbangan gelap (black flight). Proses identifikasi pada kasus penerbangan gelap dapat dilakukan dengan menganalisa data RadarCross Section (RCS) dan kecepatan dari pesawat terbang.
Seringkali data yang tertangkap di radar berupa RCS dan kecepatan pesawat dari sebuah pesawat terbang tidak selalu sama. Agar proses identifikasi pesawat terbang di udara dapat dilakukan dengan cepat dan memiliki tingkat keakuratan yang tinggi diperlukan sebuah sistem identifikasi pesawat terbang adaptif yang mampu mengidentifikasi data yang berubah-ubah namun tetap stabil. Untuk tujuan tersebut, pada makalah ini akan disampaikan aplikasi Jaringan Saraf Tiruan model Adaptive Resonance Theory 1 (JST-ART1) pada Sistem Identifikasi Pesawat Terbang (SIPT-ART1) dengan memanfaatkan RCS dan kecepatan pesawat terbang sebagai parameter identifikasi. Untuk meyakinkan akurasi hasil identifikasi kedua parameter, dilakukan fusi informasi untuk menyatakan hasil identifikasi.
Kata kunci: ART, Fusi informasi, Identifikasi pesawat terbang, Kecepatan, RCS, SIPT-ART
I PENDAHULUAN
Kemampuan radar dalam mengidentifikasi suatu pesawat terbang merupakan aspek penting dalam pertahanan udara dan keselamatan terbang di udara, baik untuk kepentingan militer maupun sipil. Untuk keperluan tersebut, radar dilengkapi dengan interrogatorIdentification Friend or Foe
(IFF) akan mengirimkan sinyal pertanyaan kepada pesawat terbang yang melewati suatu wilayah udara. Secara otomatis pesawat terbang sasaran yang dilengkapi dengan transponder (transmitter responder) akan mengirimkan sinyal balasan berupa kode identitas pesawat terbang. Apabila pesawat terbang tidak dapat merespon pertanyaan yang diberikan maka pesawat terbang tersebut akan dinyatakan sebagai penerbangan gelap (black flight) atau pesawat musuh (hostile).
Sebagai alternatif sistem identifikasi IFF atau yang biasa juga disebut Secondary Surveillance Radar (SSR), radar akan memancarkan
gelombang mikro ke arah pesawat terbang yang diidentifikasi sebagai penerbangan gelap dan menangkap pantulan dari gelombang itu untuk mendapatkan data-data yang mungkin dari pesawat terbang yang bersangkutan. Data-data yang didapatkan ini akan dijadikan parameter untuk menentukan jenis pesawat terbang tersebut.
Pada umumnya, analisis data-data dari radar yang akan digunakan untuk menentukan jenis pesawat terbang yang ingin diidentifikasi dilakukan secara manual dan hal ini membutuhkan waktu. Agar waktu identifikasi pesawat dapat dilakukan secara cepat dengan tingkat keakuratan yang cukup baik, diperlukan sebuah sistem identifikasi yang mampu beradaptasi dengan masukan data yang berasal dari radar berupa Radar Cross Section (RCS) dan kecepatan pesawat.
Prosiding SENTIA 2009 ± Politeknik Negeri Malang
Resonance Theory 1 (JST-ART1). Sistem
ditujukan untuk dapat melakukan proses
identifikasi pesawat terbang dengan cepat pada tingkat akurasi yang tinggi dengan menggunakan masukan kecepatan dan parameter unik RCS pesawat terbang.
II KONSEP RADAR DAN JST-ART1
II.1 Konsep Radar[8,15]
Radar adalah kependekan dari Radio Detection and Ranging. Radar merupakan sistem gelombang
elektromagnetik yang digunakan untuk
mendeteksi, mengukur jarak, kecepatan dan membuat map benda-benda seperti pesawat terbang, kendaraan bermotor dan pesawat
terbang-pesawat terbang lainnya. Dalam dunia
penerbangan radar biasa digunakan untuk mendeteksi suatu pesawat terbang yang sedang terbang dalam suatu kawasan wilayah tertentu.
Gambar 1. Konsep kerja radar.
Prinsip yang menjadi kunci utama teknologi ini
adalah pantulan gelombang mikro dan
implementasi efek Doppler. Radar akan
memancarkan sinyal atau gelombang mikro kepada pesawat terbang yang ingin diidentifikasi. pantulan dari gelombang mikro yang mengenai pesawat terbang akan ditangkap oleh radar untuk dianalisa lebih lanjut untuk mengetahui lokasi dan bahkan jenis pesawat terbang tersebut. Sistem radar memiliki tiga komponen utama yaitu: antena, transmitter (pemancar sinyal) dan receiver
(penerima sinyal)[15].
II.2 Radar Cross Section[4]
RCS adalah ukuran dari kemampuan sebuah pesawat terbang untuk memantulkan kembali sinyal yang dikirimkan ke arah radar. Berdasarkan penjelasan teknis, RCS adalah suatu perbandingan antara daya yang dipantulkan oleh pesawat terbang kembali ke radar dengan kerapatan daya
yang dipancarkan radar kepada pesawat terbang. Besaran nilai RCS tidak kemudian menunjukan luas sebenarnya dari fisik pesawat terbang sasaran, namun lebih
menunjukan kemampuan pesawat terbang untuk
memantulkan sinyal radar ke arah antena radar penerima. Gambar 2 menunjukan contoh RCS dari sebuah pesawat terbang.
Gambar 2. Contoh plot RCS suatu pesawat terbang.
II.3 Kecepatan Pesawat pada Radar[7,14]
Untuk mendeteksi kecepatan sebuah pesawat terbang, radar akan menggunakan penggabungan antara teknik pantulan gelombang dan asas doppler. Teknik pantulan gelombang biasa digunakan untuk mengukur jarak antara
sebuah pesawat terbang dan sumber pemancar
gelombang. Sedangkan asas doppler menjelaskan tentang perubahan frekuensi gelombang dikarenakan gerakan relatif sebuah benda terhadap benda lainnya dalam hal ini dapat dikatakan antara sumber gelombang terhadap pesawat terbang sasaran.
Pada radar, kecepatan pesawat yang tertangkap dapat diketahui dengan menggunakan Persamaan (1)[14].
Prosiding SENTIA 2009 ± Politeknik Negeri Malang
III.4 Adaptive Resonance Theory[1,2,6]
Algoritma ART dikembangkan untuk mengatasi masalah stabilitas-plastisitas (stability-plasticity dilemma) yang dihadapi oleh algoritma JST
lainnya. Masalah stabilitas-plastisitas
mempertanyakan mengenai bagaimana sebuah sistem pembelajaran dapat menjaga pengetahuan yang telah dipelajari sebelumnya namun tetap
memiliki kemampuan untuk mempelajari
masukan baru. Kunci untuk menyelesaikan masalah stabilitas-plastisitas adalah dengan
menambahkan mekanisme feedback diantara
competitive layer (lapisan F2) dan masukan layer
pada jaringan.
Gambar 3. Arsitektur ART1.
Arsitektur JST ART terdiri atas : satu lapisan pengolahan masukan yang juga sebagai lapisan perbandingan (comparison layer) pola yang disebut dengan lapisan F1, unit-unit cluster yang merupakan lapisan pengenalan yang disebut dengan lapisan F2 dan suatu mekanisme untuk mengontrol derajat kemiripan pola-pola untuk ditempatkan pada cluster yang sama yang disebut dengan mekanisme Reset.
JST ART dirancang untuk memudahkan
pengontrolan derajat kemiripan pola yang ditempatkan pada cluster yang sama. Sebuah sistem ART terdiri dari 2 subsistem, yaitu
attentional subsystem dan orienting subsystem.
II.5 Konsep Informasi Fusi[3,9]
Fusi informasi atau fusi data adalah suatu teknik pengombinasian data atau informasi untuk memperkirakan (estimate) atau memprediksi hasil keluaran dari berbagai keadaan entitas.
Entitas-entitas tersebut dapat berbentuk fisik atau non-fisik.
Masukan-masukan suatu sistem informasi dapat berupa :
data hasil observasi sensor-sensor,
masukan-masukan perintah dan data dari operator atau pengguna,
data pendahuluan dari suatu basis data yang telah ada.
Gambar 4. Konsep fusi informasi[9].
Kelas-kelas tataran fusi informasi sensor majemuk (multisensor) pada ummnya digunakan untuk aplikasi
pengenalan sasaran otomatis (automatic target
recognition, ATR).
a. Fusi tataran piksel. Tataran ini diaplikasikan kepada data piksel teregistrasi dari sekumpulan citra untuk kepentingan fungsi deteksi dan diskriminan. Data citra diperoleh dari sensor-sensor citra seperti
RADAR dan Forward Looking Infra Red (FLIR).
b. Fusi tataran fitur. Tataran ini mengombinasikan fitur-fitur pesawat terbang yang dideteksi dan dipisahkan di dalam masing-masing wilayah sensor. Fitur-fitur setiap pesawat terbang diekstraksi secara independen di dalam setiap wilayah dan membentuk satu ruang fitur bersama untuk klasifikasi pesawat terbang.
c. Fusi tataran keputusan. Tataran ini
mengombinasikan keputusan-keputusan dari jalur-jalur klasifikasi atau deteksi sensor-sensor dengan nilai heuristik seperti M-of-N, suara terbanyak maksimum (maximum vote), atau jumlah terbobot (weighted sum) untuk keputusan tegas (hard decision) dan metoda Bayes, DS dan variabel fuzzy untuk keputusan halus (soft decision).
III DESAIN DAN IMPLEMENTASI SISTEM
IDENTIFIKASI PESAWAT TERBANG
Prosiding SENTIA 2009 ± Politeknik Negeri Malang
Sistem Identifikasi Pesawat Terbang berbasis JST-ART1 (SIPT-ART1) dibagi menjadi tiga blok yaitu blok inisiasi, blok identifikasi, dan blok pemrosesan final. Arsitetktur SIPT-ART1dapat dilihat pada Gambar 5.
Gambar 5. Arsitektur SIPT-ART1.
III.1 Blok Proses Inisiasi
Blok proses inisiasi merupakan blok yang akan diproses untuk mempersiapkan masukan yang akan digunakan oleh blok identifikasi. Untuk
mendapatkan data masukan, sistem akan
mengekstrak data RCS dan kecepatan dari basis data pesawat terbang.
Untuk proses yang menggunakan ART1, data-data yang ada pada basis data pesawat akan diubah terlebih dahulu ke dalam bentuk biner. Pada penelitian ini, proses inisiasi hanya melakukan tugas sederhana, yaitu merubah data dalam bentuk angka-angka ke dalam bentuk biner. Data-data masukan pada basis data dapat dilihat pada Tabel 1.
Tabel 1. Data masukan sistem identifikasi pesawat[13].
No. Tipe Pesawat
III.2 Blok Identifikasi
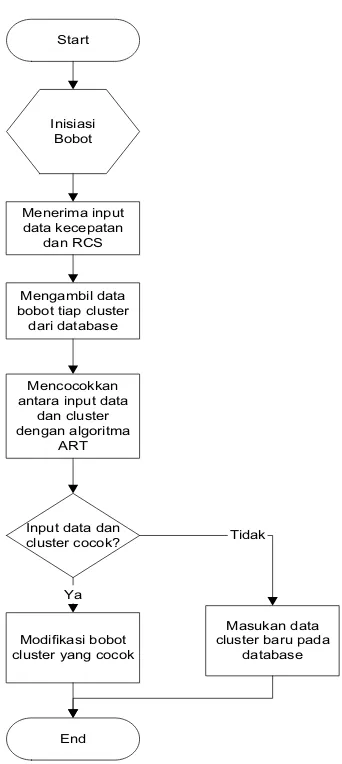
Blok identifikasi dibagi menjadi dua blok yaitu blok mode pembelajaran dan blok mode pakai.
III.2.1 Blok Mode Pembelajaran
Menerima input
Gambar 6. Diagram blok pembelajaran SIPT-ART1.
Blok mode belajar dimulai dengan sistem menerima data masukan berupa vektor berdimensi tertentu. Sistem kemudian akan berusaha mengelompokkan data masukan ke dalam cluster tertentu berdasarkan parameter
vigilance dan hasil perhitungan data yj. Apabila hasil
perhitungan yj dan tes vigilance memperlihatkan data
masukan tidak dapat dikelompokkan dalam suatu cluster,
sistem akan menandai cluster itu dan mencoba
Prosiding SENTIA 2009 ± Politeknik Negeri Malang
III.2.2 Blok Mode Pakai
Blok mode pakai pada prinsipnya sama dengan diagram alir mode belajar. Hanya saja pada mode pakai, setelah dilakukan proses pencocokan, apabila kemudian ditemukan cluster pemenang dan memenuhi tes vigilance, sistem tidak akan melakukan modifikasi terhadap bobot-bobot
cluster. Hal yang sama juga berlaku, apabila pada proses pencocokan tidak ada satupun cluster yang memenuhi parameter vigilance yang diberikan maka sistem tidak akan melakukan proses pemasukan cluster baru.
III.3 Blok Pemrosesan Final
Blok pemrosesan final merupakan blok fusi hasil yang didapatkan dari proses ART RCS dan proses ART kecepatan. Blok fusi diimplementasikan agar diperoleh hasil identifikasi yang lebih akurat.
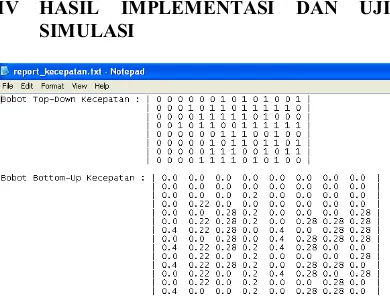
IV HASIL IMPLEMENTASI DAN UJI SIMULASI
Gambar 7. Pengetahuan SIPT-ART1 setelah proses belajar untuk pola-pola kecepatan.
Gambar 8. Pengetahuan SIPT-ART1 setelah proses belajar untuk pola-pola RCS.
Gambar 9. Akurasi identifikasi SIPT-ART1 berdasarkan nilai parameter vigilance.
Gambar 10. Tampilan program belajar SIPT-ART1.
Gambar 11. Tampilan validasi SIPT-ART1 dengan contoh validasi obyek adalah pesawat tempur F-16 Fighting Falcon.
Prosiding SENTIA 2009 ± Politeknik Negeri Malang
V KESIMPULAN
Berdasarkan seluruh proses perancangan,
implementasi, dan pengujian sistem, dapat diambil kesimpulan sebagai berkut.
x Pada JST ART-1, semakin besar parameter
vigilance maka jumlah cluster yang terbentuk akan semakin banyak.
x Pada JST ART-1, semakin besar parameter
vigilance maka ketelitian pencocokan akan semakin baik. Ketelitian pencocokan yang sangat baik tidak menjamin sistem dapat bekerja dengan efektif.
x Besarnya nilai parameter vigilance perlu
ditentukan dengan baik agar sistem dapat bekerja dengan optimal. Hasil uji simulasi pada Bagian IV menunjukkan nilai parameter
vigilance yang optimal akan berbeda-beda untuk jenis data masukan yang berbeda.
x Jumlah cluster yang terbentuk pada fase pembelajaran akan berpengaruh terhadap ketelitian pencocokan pada mode pakai.
Semakin banyak cluster yang terbentuk
ketelitiannya akan semakin baik.
REFERENSI
[1] Fausett, Laurene (1993), Fundamental of Neural Networks, Prentice-Hall.
[2] Freeman, James A., Skapura, David M.
(1991), Neural Networks Algorithms,
Applications, and Programming Techniques, Addison Wesley Longman Publishing Co., Inc., Redwood City.
[3] Hall, David L., and Llinas, James (2001),
Handbook of Multisensor Data Fusion, CRC Press, United States of America.
[4] Harre, Ingo (2004), RCS in Radar Range Calculations for Maritime Targets,
http://www.mar-it.de/Radar/RCS/RCS_xx. pdf , 24 November 2008, 20.30 WIB.
[5] Hestiningsih, Idhawati, Kecerdasan Buatan,
http://www.unimmer.ac.id/download/Kecerd asan_buatan.pdf, 3 Desember 2008, 10.30 WIB.
[6] Kung, S.Y. (1993), Digital Neural Networks, Prentice Hall, Inc., Englewood Cliffs, N.J.
[7] Nopriansyah (2008), Sistem Identification Friend, Foe, or Neutral Radar
Menggunakan Radar Cross Section dan Kecepatan Pesawat, Tugas Akhir S-1, Institut Teknologi Sistem Fusi Informasi Multiagen untuk Mendukung Pengambilan Keputusan dalam Perencanaan Operasi Udara, Tesis Magister, Institut Teknologi Bandung.
[10] Sumari, Arwin D.W. (1996), Metode Temu Kembali Informasi Secara Cerdas Menggunakan Jaringan Syaraf Tiruan Model Adaptive Resonance Theory 1, Tugas Akhir S-1, Institut Teknologi Bandung.
[11] ______________, Doppler Effect in Accoustics,
http://physics-animations.com/Physics/English/ wave_txt.htm#Doppler, 25 November 2008, 20.00 WIB.
[12] ______________, A-OA-148-001/AG-000 Manual
of Instrument Flying, http://www.icpschool.com/ Downloads/files/O-OA-148/pdfs/Chap21a.PDF, 2 Desember 2008, 09.00 WIB.
[13] ______________, http://www.airtoaircombat.com, 3 Februari 2008, 11.00 WIB.
[14] ______________, Lab Exercise 7 : Doppler Radar,
http://www.eecs.umich.edu/emag/labmanual/EECS 330_LE7.pdf, 3 Desember 2008, 10.00 WIB.

![Gambar 4. Konsep fusi informasi[9].](https://thumb-ap.123doks.com/thumbv2/123dok/3966115.1909535/12.595.83.281.309.434/gambar-konsep-fusi-informasi.webp)