Penerapan Jaringan Saraf Runge Kutta-Fungsi Basis Radial
dan Metode Nonlinier Recursive Least-Square
pada Identifikasi Sistem Dinamis
Rully Soelaiman1, Egawati Panjei1 dan Irfan Subakti.11 Fakultas Teknologi Informasi,
Institut Teknologi Sepuluh Nopember (ITS), Surabaya, 60111, Indonesia E-mail: [email protected]
Abstrak – Sistem dinamik yang dinyatakan dalam persamaan diferensial biasa (PDB) dapat diidentifi-kasikan dengan menggunakan jaringan saraf tiruan (JST) Fungsi Basis Radial (FBR). Seperti diketahui metode Runge Kutta dapat digunakan untuk memperoleh solusi numerik PDB. Karena itu timbul gagasan untuk merangkai beberapa JST FBR mengikuti persamaan Runge Kutta.
JST Runge Kutta-Fungsi Basis Radial (RKFBR) yang akan dibahas meliputi RKFBR orde dua serta RKFBR orde empat. RKFBR orde dua merupakan JST yang terdiri dari dua buah FBR yang dirangkai mengikuti persamaan Runge Kutta orde dua. Sementara RKFBR orde empat merupakan JST yang terdiri dari empat buah FBR yang dirangkai mengikuti persamaan Runge Kutta orde empat. Pembelajaran pada setiap JST ini dilakukan dengan menggunakan teknik gradient descent serta metode Nonlinier Recursive Least Square (NRLS).
Pengujian dilakukan pada tiga kasus yakni persamaan Van der Pol, benda jatuh serta Lorenz. Hasil uji coba menunjukan training dengan RKFBR baik orde dua maupun orde empat metode NRLS lebih cepat konvergen dibandingkan training dengan teknik gradient descent. Selain itu diperoleh kesimpulan bahwa prediksi dengan RKFBR orde empat lebih akurat dibandingkan RKFBR orde dua.
Kata kunci: metode Runge Kutta, Fungsi Basis Radial, gradient descent, Recursive Least Square.
I. PENDAHULUAN
Sistem dinamik merupakan sistem yang perilakunya berubah terhadap waktu. Perubahan pada sistem dinamik merupakan solusi persamaan diferensial biasa (PDB) [3], [4] : )) ( ( . t x f x= (1)
Dimana fungsi f(x(t)) tidak diketahui [7].
Metode Runge Kutta menghasilkan solusi numerik PDB [9]. Karena itu muncul gagasan menerapkan metode Runge Kutta untuk merangkai FBR menjdi RKFBR untuk identifikasi sistem
dinamik [1], [2], [5] Permasalahan yang akan diang-kat dalam paper ini meliputi:
• Penerapan metode Runge Kutta pada JST FBR. • Identifikasi sistem dinamik dengan JST RKFBR. • Struktur dan proses belajar JST RKFBR. • Metode optimasi pada pembelajaran RKFBR.
II. RUNGE KUTTA FUNGSI BASIS
RADIAL
RKFBR yang dibahas berupa RKFBR orde dua serta RKFBR orde empat. Kedua JST ini akan digunakan untuk mengidentifikasi sistem dinamik seperti pada persamaan (1) Dimana lintasan dari sistem dinamik yang akan dilatih=
{
x( )
i;x0 |i=0,L,L−1,x0∈D}
.a) RKFBR orde dua
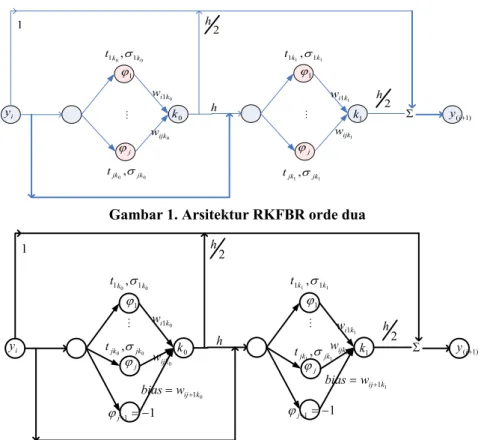
RKFBR orde dua terdiri dari dua FBR yang dirangkai berdasarkan metode Runge Kutta orde dua [9]. Gambar 1 menunjukan arsitektur RKFBR orde dua. Aliran sinyal input yang menghasilkan output dinyatakan sebagai berikut:
) ( 2 1 ) ( ) 1 (i y i hk0 k1 y + = + + (2) ) , , ); ( ( 0 0 0 0 Nf yi wk tk k k = σ (3) ) , , ; ) ( ( 0 1 1 1 1 Nf y i hk wk tk k k = + σ (4) Di mana Nf menyatakan JST FBR, w = bobot, t =
pusat FBR, serta σ = jarak antar pusat FBR.
Pada hidden layer pada masing-masing FBR dilakukan formulasi dengan menggunakan fungsi gaussian:
(
)
⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − − = 2 2 2 exp j j j t input σ ϕ (5) Selanjutnya pada masing-masing output layer RKFBR dilakukan formulasi:w
output=Φ (6)
Dimana Φ merupakan matriks yang komponennya berisi nilai ϕ . j
j ϕ 1 ϕ M 0 1k i w 0 ijk w 0 0, jk jk t σ j ϕ 1 ϕ M 1 1k i w 1 ijk w 1 1, jk jk t σ i y k0 k1 Σ 1 h2 2 h ) 1 (i+ y 0 0 1 1k , k t σ t1k1,σ1k1 h
Gambar 1. Arsitektur RKFBR orde dua
j ϕ 1 ϕ M wi1k0 0 ijk w 0 0, jk jk t σ j ϕ 1 ϕ M 1 1k i w 1 ijk w 1 1, jk jk t σ i y k0 k1 Σ 1 h2 2 h ) 1 (i+ y 0 0 1 1k , k t σ t1k1,σ1k1 h 1 1=− + j ϕ 0 1k ij w bias= + 1 1=− + j ϕ 1 1k ij w bias= +
Gambar 1. Arsitektur RKFBR orde dua dengan bias
Penambahan bias pada arsitektur RKFBR orde dua perlu dilakukan pada kasus tertentu. Hal ini dilakukan dengan mengasumsikan nilai bias sama dengan bobot pada indeks ke-j+1 dan nilai
1
1=− + j
ϕ Arsitektur RKFBR orde dua dengan bias dapat dilihat pada gambar 2.
Training pada RKFBR orde dua terkait dengan ruang hipotesis yakni melakukan perubahan pada bobot w, pusat/center
t
serta jarak antar pusatσ
guna meminimalisasi squared error yang didefenisikan pada persamaan (7). Error yang diha-silkan kemudian dirambatkan kembali ke belakang untuk melakukan formulasi pada bobot dan bias. Squared error didefenisikan sebagai berikut:2 ) 1 ( ) 1 ( ) (n = xi+ −yi+ E (7) Dimana : 1 + i
x = target pada lintasan yang ke-i+1
1 +
i
y
= output RKFBR lintasan yang ke – i+1 Teknik gradient descent mencari gradien error terhadap bobot w, pusat/centert
serta jarak antar pusatσ
dengan cara merambatkan sinyal error yang terletak di belakang ke depan. Gradien error untuk setiap parameter dinyatakan sebagai berikut:w y y E w E i i ∂ ∂ ∂ ∂ = ∂ ∂ + + 1 1 (8) t y y E t E i i ∂ ∂ ∂ ∂ = ∂ ∂ + + 1 1 (9) σ σ ∂ ∂ ∂ ∂ = ∂ ∂ + + 1 1 i i y y E E (10)
Jika ω mewakili parameter yang dicari yakni w, t serta σ maka gradien output RKFBR terhadap
ω pada masing-masing FBR dapat dituliskan sebagai berikut:
(
1 1 2 + − + − = ∂ ∂ i i y x E ω)
(11) ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ + ∂ ∂ = ∂ ∂ + ω ω ω 0 1 ) 1 ( 2 k k h yi (12) Dimana : j i f j w w y N w k ∂ ∂ = ∂ ∂ 0 ( (), ) (13)(
)
j i f j i i f j w w hk y N h w k hk y w hk y N w k ∂ + ∂ + ∂ ∂ + ∂ + ∂ = ∂ ∂ ) , ( ) , ( 0 ) ( 0 0 0 ) ( 1 (14)Update pada bobot, pusat serta jarak antar pusat dilakukan sebagai berikut:
) ( ) ( ) ( ) 1 ( n w n E n n ∂ ∂ − = + ω η ω (15)
Langkah-langkah training/pelatihan pada RKFBR orde dua untuk identifikasi sistem dinamik dapat dilihat pada algoritma 1:
Algoritma 1. Algoritma Training/Pelatihan Identifikasi Sistem Dinamik dengan RKFBR
1 y(1,n) Å x(1,n) 2 for j Å 1 to max epoch
3 do for i Å 2 to length [target] 4 do
5
// aliran signal input/forward
(, ) ( 1,1) 1 ( 0 1) 2hk k i x n i y ← − + +
6 // aliran signal ouput/backpropagation σ ∂ ∂ ∂ ∂ ∂ ∂ E t E w E , , pada setiap Nf
7 // update bobot, pusat serta jarak antar pusat
w E w w ∂ ∂ − ← η
,
t E t t ∂ ∂ − ← η,
σ η σ σ ∂ ∂ − ← ELangkah-langkah aliran sinyal input/forward untuk memperoleh output RKFBR orde dua dapat dilihat pada algoritma 2.
Algoritma 2. Aliran sinyal input/ forward pada RKFBR orde dua 1 yk0 ←ϕ
(
xi,t,σ)
2 k ←∑
yk ⋅w 0 0 3 yk1←ϕ(
xi+hk0,t,σ)
4 k ←∑
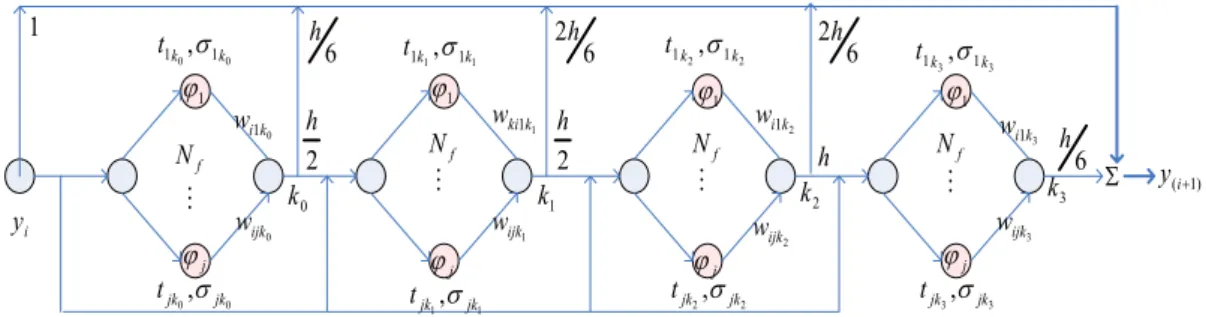
yk ⋅w 0 1 5 ) ( 2 1 1 0 1 x h k k yi+ = i+ + b) RKFBR orde empatRKFBR orde empat terdiri dari empat FBR yang dirangkai berdasarkan metode Runge Kutta orde empat [9]. Gambar 3 menunjukan arsitektur RKFBR orde empat. Aliran sinyal input yang menghasilkan output dinyatakan sebagai berikut:
) 2 2 ( 6 1 ) ( ) 1 (i yi h k0 k1 k2 k3 y + = + + + + (16) Dimana: ) , , ); ( ( 0 0 0 0 Nf yi wk tk k k = σ (17) ) , , ; ) ( ( 0 1 1 1 1 Nf y i hk wk tk k k = + σ (18) ) , , ; 2 1 ) ( ( 1 2 2 2 2 Nf yi hk wk tk k k = + σ (19) ) , , ; ) ( ( 2 3 3 3 3 Nf yi hk wk tk k k = + σ (20)
Formulasi pada setiap FBR yang menyusun RKFBR orde empat ini sama dengan yang dilakukan pada persamaan (5) dan (6).
Seperti pada RKFBR orde dua training pada RKFBR orde empat juga dimaksudkan untuk
meminimalisasi squared error yang didefenisikan pada persamaan (7). Jikaω mewakili parameter yang dicari yakni w, t serta σ maka gradien output RKFBR terhadap ω pada masing-masing FBR dapat dituliskan sebagai berikut:
ω ω ∂ ∂ ∂ ∂ = ∂ ∂ + + 1 1 i i y y E E (21) ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ + ∂ ∂ + ∂ ∂ + ∂ ∂ = ∂ ∂ + ω ω ω ω ω 0 1 2 3 ) 1 ( 2 2 6 1 k k k k h yi (22) Dimana: ω ω ω ∂ ∂ = ∂ ∂k0 Nf(y(i), ) (23) ω ω ω ω ω ∂ + ∂ + ∂ ∂ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + ∂ + ∂ = ∂ ∂ ) , 2 1 ( 2 1 2 1 ) , 2 1 ( 0 ) ( 0 0 0 ) ( 1 hk y N h k hk y hk y N k i f i i f (24) ω ω ω ω ω ∂ + ∂ + ∂ ∂ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + ∂ + ∂ = ∂ ∂ ) , 2 1 ( 2 1 2 1 ) , 2 1 ( 1 ) ( 1 1 1 ) ( 2 hk y N h k hk y hk y N k i f i i f (25)
(
)
ω ω ω ω ω ∂ + ∂ + ∂ ∂ + ∂ + ∂ = ∂ ∂ ) , ( ) , ( 2 ) ( 2 2 2 ) ( 3 hk y N h k hk y hk y N k i f i i f (26)c) Nonlinier Recursive Least Square (NRLS)
NRLS merupakan algoritma yang digunakan untuk melakukan penyesuaian pada bobot. Diasumsikan pusat serta jarak antar pusat sudah tidak berubah karena sebelumnya telah dicari dengan teknik gradient descent. Langkah-langkah algoritma NRLS:
a. Lakukan inisialisasi untuk bobot. b. Tentukan bentuk regresi nonlinear.
c. Tentukan solusi least square untuk menghitung bobot dan selesaikan dengan algoritma RLS [6]. d. Cek apakah bobot sudah konvergen, jika belum
0 1k i w 0 ijk w 1 1k ki w 1 ijk w 2 1k i w 2 ijk w 3 1k i w 3 ijk w 0 k k1 k2 k3 6 h 6 2h 6 2h Σ 6 h ) 1 (i+ y 1 i y M M M M f N Nf Nf Nf 0 0 1 1k, k t σ 0 0, jk jk t σ 1 1 1 1k, k t σ 1 1, jk jk t σ tjk2,σjk2 2 2 1 1k , k t σ 3 3 1 1k, k t σ 3 3, jk jk t σ 1 ϕ ϕ1 ϕ1 ϕ1 j ϕ j ϕ j ϕ j ϕ 2 h 2 h h
Gambar 3. Arsitektur RKFBR orde empat
NRLS yang akan dijelaskan berikut ini berupa NRLS zero order.
d) NRLS RKFBR orde dua
Diasumsikan lintasan dari suatu sistem dinamik yang akan dilatih:
( )
{
xi;x0 |i=0,L,L−1,x0∈D}
Persamaan (20) dapat ditulis ulang sebagai berikut:
( ) ( ) ( ) ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ ∂ + + = − + xi W dx N h W i x W i x h i x i x T W i x f T T () () () 2 ) ( ) 1 ( φ φ ((), )φ (27) ( ) ( )xi W dx N h W i x h i x i x T W i x f T () 2 ) ( ) ( ) 1 ( ((), ) 2 φ φ + ∂ = − + (28)
)
(
i Tx
φ
merupakan bentuk regresi non linear dari RKFBR orde dua.i i
x
y
+1−
{
}
{
}
{
}
⎪ ⎪ ⎪ ⎪ ⎭ ⎪⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎨ ⎧ ⎥⎦ ⎤ ⎢⎣ ⎡ + + + + ⎥⎦ ⎤ ⎢⎣ ⎡ + + + ⎥⎦ ⎤ ⎢⎣ ⎡ + + = ) ( ) ( 2 ) ( ) ( 2 ) ( ) ( 2 ) ( 1 1 2 2 1 1 1 i i N i N i i i i i i i T hk x x h hk x x h hk x x h x φ φ φ φ φ φ φ L (29) Jika: ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − = −1 1 2 0 1 L L d x x x x x x Y M (30)merupakan matriks berukuran [Lx1]
Dalam bentuk matriks, persamaan (27) dapat dinyatakan sebagai berikut:
( )
( )
( )
( )
d L T L L T T T Y W x W x hM x x W x hM x h = ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + − − −1 1 1 0 0 0 ) , ( ) , ( φ φ φ φ M M (31) Dimana: ) , ( 2 1 W i x f x N M ∂ ∂ = (32)Dan jika FBR yang dipakai berupa fungsi gaussian pada persamaan (5) maka:
(
)
⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − − ⋅ = ∂ ∂∑
= 2 1 ) , ( j j i j N j j W i x f x t W x N σ φ (33) Didefinisikan:(
)
( )
( )
⎥⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ≡ − −1 0 ) 1 ( , ), 1 ( ), 0 ( L T T x x h L x x x φ φ M M L L (34) merupakan matriks berukuran [LxN], dan(
)
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − ≡ − ) ), 1 ( ( 0 0 0 0 0 0 ) ), 0 ( ( ) 1 ( , ), 1 ( ), 0 ( ; W L x M W x M h L x x x W D O L (35)merupakan matriks berukuran [LxL] Jika x=
(
x(0),x(1),L,x(L−1))
[
I+D(W;x)×L(x)W]
=Yd (36) Yd x W D I W x )] ; ( [ 1 ) ( + = L (37)Dengan demikian solusi least square dapat diperoleh dengan rumus sebagai berikut:
(
)
Yd W x hM diag x x x W T T ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + = − ) ), 0 ( ( 1 1 ) ( ) ( ) ( L 1L L (38) e) NRLS RKFBR Orde EmpatDiasumsikan lintasan dari suatu sistem dinamik yang akan dilatih:
( )
{
xi;x0 |i=0,L,L−1,x0∈D}
Persamaan (26) dapat ditulis ulang sebagai berikut:
( )
(
)
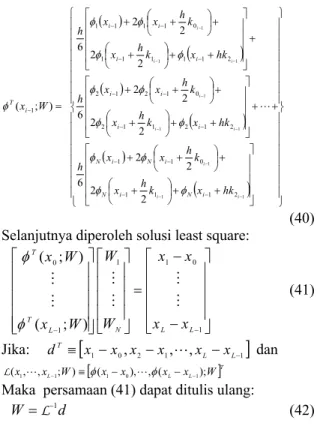
⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛ + + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + + + = ∑ ∑ ∑ ∑ = − = − = − = − − − − − N l l i l N l l i l N l l i l N l l i l i i W hk x W k h x W k h x W x h x y i i i 1 1 2 1 1 1 1 0 1 1 1 1 1 1 1 2 2 2 2 6 1 φ φ φ φ(39) Diperoleh bentuk regresi linear:
( )
(
)
( )(
)
( )(
)
⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎭ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨ ⎧ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + + + + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + + + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + + = − − − − − − − − − − − − − − − − − − − − − − 1 1 1 1 1 1 1 1 1 2 1 1 1 0 1 1 2 1 2 1 1 2 0 1 2 1 2 2 1 1 1 1 1 0 1 1 1 1 1 2 2 2 2 6 2 2 2 2 6 2 2 2 2 6 ) ; ( i i i i i i i i i hk x k h x k h x x h hk x k h x k h x x h hk x k h x k h x x h W x i N i N i N i N i i i i i i i i i T φ φ φ φ φ φ φ φ φ φ φ φ φ L (40) Selanjutnya diperoleh solusi least square:⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − 1 0 1 1 1 0 ) ; ( ) ; ( L L N L T T x x x x W W W x W x M M M M M M φ φ (41) Jika: dan
[
1− 0, 2− 1, , − −1 ≡ L L T x x x x x x d L]
[ ]T L L L W x x x x W x x, , ; ) ( ), , ( ); (1L −1 ≡φ 1− 0 Lφ − −1 LMaka persamaan (41) dapat ditulis ulang: d
W = L−1 (42)
III UJI COBA DAN EVALUASI
Uji coba identifikasi sistem dinamik dengan menggunakan RKFBR dilakukan pada tiga kasus yakni: persamaan Van der Pol, persamaan benda jatuh serta persamaan Lorenz.
a) Persamaan Van der Pol
Persamaan Van der Pol merupakan persamaan diferensial biasa yang menggambarkan perpanjangan osilasi yang energinya dipindahkan dari osilasi yang besar dan dimasukan ke dalam osilasi yang kecil. Persamaan ini berkembang dalam studi tentang sirkuit yang berisi pembuluh hampa udara.
Persamaan Van der Pol merupakan bentuk sistem dinamik dan dinyatakan sebagai berikut:
0 ' ) 1 ( "− −y2 y+y= y (43)
Bentuk di atas berupa persamaan diferensial orde dua dan dapat diubah ke dalam persamaan diferensial orde satu sebagai berikut:
Misalkan y=x2 dan y' x= 1,maka (43) menjadi:
0 ) 1 ( 1 2 2 2 2 1 − − + = ∂ ∂ x x x x x (44) 2 1 2 2 2 1 (1 x )x x x x = − − ∂ ∂ (45)
Training dilakukan dengan mengambil titik awal [2,-1] dengan h = 0.09 serta
η
untuk teknik gradien descent = 0.2. RMSE yang diperoleh dapat dilihat pada tabel 1. Lintasan yang diperoleh dapat dilihat pada gambar 4Tabel 1 Perbandingan RMSE RKFBR Van der Pol JST x1 x2 RKFBR orde 2 G.Desc. 0.1836 0.1424 RKFBR orde 2 NRLS 0.1833 0.1414 RKFBR orde 4 G.Desc. 0.1837 0.1396 RKFBR orde 4 NRLS 0.1833 0.1389
b) Persamaan Gerak Benda Jatuh
Kasus yang kedua adalah persamaan benda jatuh yang dirumuskan sebagai berikut:
) ( 2 . 1 x t x =− (46) ) ( )) ( exp( 2 2 1 2 1 . 2 c c x t x t x =− (47)
Di mana merupakan koefisien gaya, merupakan kerapatan udara, = ketinggian benda pada saat t, = kecepatan benda pada saat t. 3 1=3×10 c 5 2 5 10 − × − = c x1 2 x
Sebuah benda jatuh dari ketinggian 200x103 kaki
dengan kecepatan awal 16x103. Lintasan yang
dibentuk oleh benda tersebut selanjutnya diprediksi dengan menggunakan RKFBR. Training untuk kasus ini menggunakan RKFBR yang diberi bias. Time step/h = 0.09 serta
η
untuk teknik gradien descent = 0.2. RMSE yang diperoleh dapat dilihat pada tabel 2. Sementara lintasan hasil training dapat dilihat pada gambar 5.Tabel 2. Perbandingan RMSE JST Runge Kutta
kasus Benda Jatuh (103)
JST x1 x2
RKFBR orde 2 G.Desc 1.4491 0.3998 RKFBR orde 2 NRLS 0.5339 0.0573 RKFBR orde 4 G.Desc 1.4839 0.4217 RKFBR orde 4 NRLS 0.5207 0.0339
Tabel 3. Perbandingan RMSE JST Runge Kutta kasus Lorenz JST z1 z2 z3 RKFBR orde 2 G.Desc. 0.5558 0.8180 0.9791 RKFBR orde 2 NRLS 0.5553 0.8165 0.9778 RKFBR orde 4 G.Desc. 0.5557 0.8179 0.9790 RKFBR orde 4 NRLS 0.5552 0.8159 0.9778 c) Persamaan Lorenz
Lorenz attractor merupakan sistem nonlinier tiga dimensi yang digunakan untuk memodelkan konveksi acak/turbulen dalam fluida. Sistem ini dinyatakan dengan persamaan (48) – (50).
) ( 2 1 1 z z t z = − ∂ ∂ σ (48)
(
3)
1 2 2 1 z z z t z = + − − ∂ ∂ λ (49)3 2 1 3 zz z t z = −γ ∂ ∂ (50)
Untuk uji coba nilai
(
σ,λ,γ)
=(10,24,2).Training kasus Lorenz dilakukan dengan mengambil titik awal [1,0,20] , h = 0.09 dan eta = 0.2.
RMSE yang diperoleh dapat dilihat pada tabel 3. Sementara lintasan hasil training dapat dilihat pada gambar 6 dan 7.
IV KESIMPULAN
Dari hasil uji coba dapat ditarik kesimpulan sebagai berikut:
1. Berdasarkan grafik lintasan hasil fase training terhadap setiap persoalan yang diujicobakan, metode RKFBR teknik NRLS lebih cepat mecapai konvergen dibandingkan dengan RKFBR teknik Gradient Descent. Hal ini berlaku baik untuk RKFBR orde dua maupun RKFBR orde empat.
2. Berdasarkan hasil perbandingan RMSE, ditun-jukkan bahwa metode training RKFBR orde empat teknik NRLS lebih akurat dibandingkan training RKFBR orde dua NRLS. Namun untuk teknik Gradient Descent hal ini tidak berlaku mutlak.
V. DAFTAR PUSTAKA
[1] Yi Jen Wang and Chin Teng Lin, “Runge Kutta Neural Network for Identification of Dynamical Sistem in High Accuracy”, IEEE. Trans. Neural
Networks, 1998.
[2] M. Onder Efe and Okyay Kaynak, "A Comparative Study of Soft-Computing Methodologies in Identification of Robotic Manipulator ", Robotic and
Autonomous System 30, pp. 221-230, 1999.
[3] W. T. Miller, R. S. Sutton, and P. J. Werbos, “Neural Networks for Control”, Cambridge, MA: MIT Press, 1990.
[4] K. J. Hunt, D. Sbarbaro, R. Zbikowski, and P. J. Gawthrop, “Neural Networks for Control System: A Survey”, Automatica, vol.28, no.6, pp.1083-1112. Nov, 1998.
[5] K .S. Narendra and K. Parthasarathy, ”Identification and Control of dynamical System Using Neural Networks”, IEEE Trans. Neural Networks, vol.1, pp. 4-27,1990.
[6] T. K. Moon and W.C.Stirling, “Mathematical Methods and Algorithms for Signal Processing”, Prentice-Hall Inc, 2000.
[7] I. G. Petrovski, “Ordinary Differential Equations”, Englewood Cliffs, NJ: Prentice-Hall, 1996.
[8] S.Haykin. ”Neural Network A Comprehensive Foundation Second Edition”, Prentice-Hall, Inc, New Jersey, 1999.
[9] Steven C. Chapra and Canale P.Raymond, “Numerical Methods for Enggineers with Software & Programming Application”, McGraw Hill,2002.
-3 -2 -1 0 1 2 3 4 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5
t RBF orde dua gradient descent
x2
(t
)
Lintasan Target
Lintasan Hasil Training dengan RBF orde dua gradient descent
-3 -2 -1 0 1 2 3 4 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5
t RBF orde dua zero order
x2
(t
)
Lintasan Target
Lintasan Hasil Training dengan RBF orde dua zero order
RKFBR orde dua teknik Gradient Descent. RKFBR orde dua NRLS
-3 -2 -1 0 1 2 3 4 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5
t RBF orde empat gradient descent
x2
(t
)
Lintasan Target
Lintasan Hasil Training dengan RBF orde empat gradient descent
-3 -2 -1 0 1 2 3 4 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5
t RBF orde empat zero order
x2
(t
)
Lintasan Target
Lintasan Hasil Training dengan RBF orde empat zero order
RKFBR orde empat teknik Gradient Descent. RKFBR orde empat NRLS
Gambar 4. Lintasan Van der Pol hasil training dengan RKFBR, titik awal [2,-1]
0 5 10 15 20 25 30 0 2000 4000 6000 8000 10000 12000 14000 16000
t RKRBF orde dua gradient descent
x2
(t
)
Lintasan Target
Lintasan Hasil Training dengan RKRBF orde dua gradient descent
0 5 10 15 20 25 30 0 2000 4000 6000 8000 10000 12000 14000 16000
t RKRBF orde dua zero order
x2
(t
)
Lintasan Target
Lintasan Hasil Training dengan RKRBF orde dua zero order
RKFBR orde dua teknik Gradient Descent. RKFBR orde dua NRLS
0 5 10 15 20 25 30 0 2000 4000 6000 8000 10000 12000 14000 16000
t RKRBF orde empat gradient descent
x2
(t
)
Lintasan Target
Lintasan Hasil Training dengan RKRBF orde empat gradient descent
0 5 10 15 20 25 30 0 2000 4000 6000 8000 10000 12000 14000 16000
t RKRBF orde empat zero order
x2
(t
)
Lintasan Target
Lintasan Hasil Training dengan RKRBF orde empat zero order
RKFBR orde empat teknik Gradient Descent. RKFBR orde empat NRLS
-15 -10 -5 0 5 10 15 -15 -10 -5 0 5 10 15 20
z1(t) RKRBF orde dua gradient descent
z2
(t
)
Lintasan Target
Lintasan Hasil Training dengan RKRBF orde dua gradient descent
-15 -10 -5 0 5 10 15 -15 -10 -5 0 5 10 15 20
z1(t) RKRBF orde dua zero order
z2
(t
)
Lintasan Target
Lintasan Hasil Training dengan RKRBF orde dua zero order
RKFBR orde dua teknik Gradient Descent. RKFBR orde dua NRLS
Gambar 6. Lintasan Lorenz hasil training dengan RKFBR orde dua
-15 -10 -5 0 5 10 15 -15 -10 -5 0 5 10 15 20
z1(t) RKRBF orde empat gradient descent
z2
(t
)
Lintasan Target
Lintasan Hasil Training dengan RKRBF orde empat gradient descent
-15 -10 -5 0 5 10 15 -15 -10 -5 0 5 10 15 20
z1(t) RKRBF orde empat zero order
z2
(t
)
Lintasan Target
Lintasan Hasil Training dengan RKRBF orde empat zero order
RKFBR orde empat teknik Gradient Descent. RKFBR orde empat NRLS