30 BAB IV
PENGUJIAN DAN ANALISIS
Bab ini akan membahas mengenai pengujian dan analisis pada alat Pengendali Ketinggian Meja Otomatis Dengan Kontrol Smartphone Android Menggunakan Media Koneksi Bluetooth. Tujuan dari pengujian adalah untuk mengetahui apakah alat yang dirancang dapat memberikan hasil sesuai dengan harapan penulis, dalam hal ini seperti spesifikasi yang telah ditulis. Sedangkan analisis digunakan untuk membandingkan hasil perancangan dengan hasil pengujian.
4.1. Pengujian Driver Motor
Pengujian dengan meghubungkan driver motor pada aktuator yang dikontrol melalui Arduino. Terdapat 2 buah driver motor EMS 5A yang berfungsi untuk menggerakkan masing- masing aktuator pada kaki meja. Mekanik kaki meja yang bergerak naik turun membutuhkan putaran motor secara CW (Clock Wise) dan CCW (Counter Clock Wise). Caranya adalah dengan mikrokontroler memberikan logika ‘1’ pada pin input IN1 dan logika ‘0’ pada IN2 maka motor akan berputar searah jarum . Sedangkan untuk putaran CCW berlaku sebaliknya.
Gambar 4.1. Pengujian driver motor pada aktuator meja
31
Tabel 4.1 . Pengujian driver motor EMS 5A
1.2 Pengujian jarak ketinggian meja dengan sensor SRF04
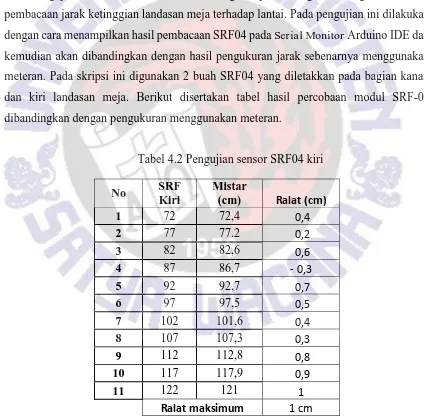
Pengujuan sensor SRF04 dilakukan dengan tujuan mengetahui tingkat ketelitian pembacaan jarak ketinggian landasan meja terhadap lantai. Pada pengujian ini dilakukan dengan cara menampilkan hasil pembacaan SRF04 pada Serial Monitor Arduino IDE dan kemudian akan dibandingkan dengan hasil pengukuran jarak sebenarnya menggunakan meteran. Pada skripsi ini digunakan 2 buah SRF04 yang diletakkan pada bagian kanan dan kiri landasan meja. Berikut disertakan tabel hasil percobaan modul SRF-04 dibandingkan dengan pengukuran menggunakan meteran.
Tabel 4.2 Pengujian sensor SRF04 kiri
32
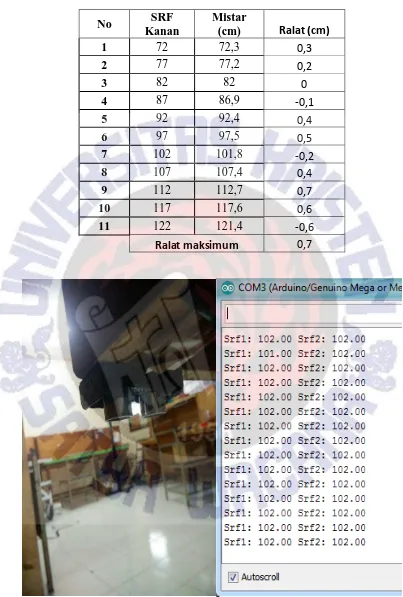
Tabel 4.3 Pengujian sensor SRF04 kanan
No SRF
Kanan
Mistar
(cm) Ralat (cm)
1 72 72,3 0,3
2 77 77,2 0,2
3 82 82 0
4 87 86,9 -0,1
5 92 92,4 0,4
6 97 97,5 0,5
7 102 101,8 -0,2
8 107 107,4 0,4
9 112 112,7 0,7
10 117 117,6 0,6
11 122 121,4 -0,6
Ralat maksimum 0,7
33
. Dari data hasil 2 pembacaan jarak yang terukur oleh sensor SRF04 kiri dan SRF04 kanan dan jarak sebenarnya dengan menggunakan meteran pada tabel 4.2 dan tabel 4.3, dapat dilihat bahwa untuk pergeseran 0.1 – 0.9 cm pada pengukuran permukaan meja terhadap lantai disebabkan karena pembacaan SRF04 tidak memakai tipe data float (bilangan desimal) melainkan memakai tipe data integer (bilangan bulat), sehingga tinggi yang nilainya bukan bilangan bulat akan dibulatkan oleh mikrokontroler. Namun ini tidak terlalu berpengaruh terhadap kinerja sistem. Hanya saja jarak yang terukur sensor dengan sebenarnya kurang akurat yaitu maksimum 1 cm.
4.3 Pengujian Kedataran Meja
34
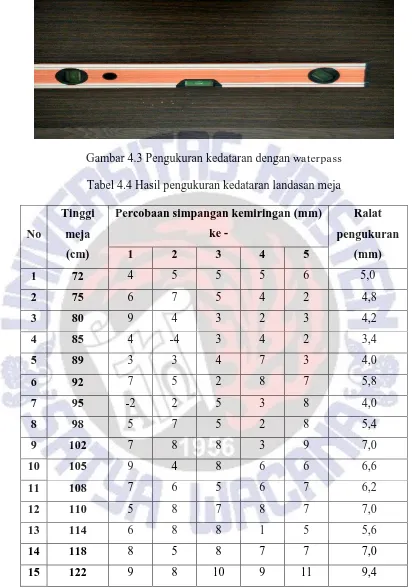
Gambar 4.3 Pengukuran kedataran dengan waterpass
Tabel 4.4 Hasil pengukuran kedataran landasan meja
35
vertical terhadap lantai adalah sebesar 9,4 mm sedangkan penyimpangan maksimum yang diijinkan menurut ISO 0,05. Jadi penyimpangan yang terjadi sudah melebihi batas yang diijinkan.
Pengujian kelurusan gerak vertical landasan mejadalam arah bidang tegak lurus terhadap bidang vertical, landasan meja menunjukkan penyimpangan yang sudah melebihi batas yang diijinkan hal ini kemungkinan disebabkan oleh :
1. Ulir memiliki tingkat kekasaran yang berbeda sehingga menyebabkan
ketidak samaan gerak kaki meja.
2. Adanya kesalahan selisih pembacaan antara 2 sensor SRF04, sehingga
ketika kedua aktuator yang bergerak mulai dihentikan posisi landasan
meja masih berada pada kondisi yang belum datar dan pembacaan jarak
dengan antara 2 sensor SRF kurang akurat.
3. Adanya kesalahan dalam proses pengukuran
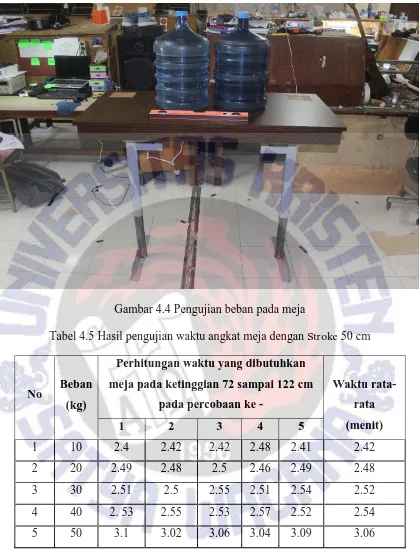
4.4 Pengujian beban dan kecepatan ulir pada meja
36
Gambar 4.4 Pengujian beban pada meja
Tabel 4.5 Hasil pengujian waktu angkat meja dengan Stroke 50 cm
No Beban (kg)
Perhitungan waktu yang dibutuhkan meja pada ketinggian 72 sampai 122 cm
pada percobaan ke -
37
mengatisipasi perbedaan kecepatan aktuator ini digunakan 2 sensor SRF04 untuk membandingkan jarak ketinggian landasan meja terhadap lantai. Hasil pembacaan dengan menggunakan 2 sensor SRF04 ini akan digunakan sebagai nilai pembanding untuk mengubah kecepatan motor dengan menggunakan PWM melalui driver motor. Pada saat meja bergerak naik, hasil pembacaan sensor SRF04 bagian kiri meja bernilai lebih besar dari hasil pembacaan sensor SRF04 bagian kakan meja maka kecepatan motor bagian kiri akan melambat sedangkan motor bagian kakan akan menambah kecepatan putaran motor, begitu juga sebaliknya. Sehingga dengan kondisi tersebut kecepatan aktuator sangat dipengaruhi oleh hasil perbandingan pembacaan jarak oleh 2 sensor SRF04.
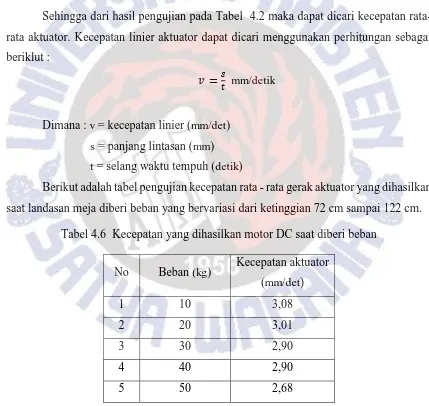
Sehingga dari hasil pengujian pada Tabel 4.2 maka dapat dicari kecepatan rata- rata aktuator. Kecepatan linier aktuator dapat dicari menggunakan perhitungan sebagai beriklut :
� = mm/detik
Dimana : v = kecepatan linier (mm/det) s = panjang lintasan (mm) t = selang waktu tempuh (detik)
Berikut adalah tabel pengujian kecepatan rata - rata gerak aktuator yang dihasilkan saat landasan meja diberi beban yang bervariasi dari ketinggian 72 cm sampai 122 cm.
Tabel 4.6 Kecepatan yang dihasilkan motor DC saat diberi beban
No Beban (kg) Kecepatan aktuator
38
kecepatan aktuator yang direalisasikan tidak sesuai dengan hasil pada perhitungan 4.1, yaitu sebesar 4,9 mm/detik. Hal ini dikarenakan pada realisasi pembuatan 2 buah aktuator yang dihasilkan memiliki kecepatan yang berbeda. Sehingga kecepatan putaran motor sangat dipengaruhi oleh hasil perbandingan nilai pembacaan jarak oleh 2 sensor SRF04 untuk mengatur putaran motor pada kedua aktuator supaya landasan meja berada pada kondisi datar atau tidak miring saat digerakkan baik naik maupun turun.
4.5. Pengujian Sinkronisasi Smartphone dengan Modul Bluetooth
Pada proses ini smartphone akan melakukan pairing dengan perangkat board mikrokontroler yang sudah terpasang modul bluetooth HC-05. Modul bluetooth ini berfungsi sebagai jembatan komunikasi data pada sistem. Dengan melalui media bluetooth, pada proses ini kita akan menguji sinkronisasi smartphone dengan modul bluetooth HC-05 dengan cara mengaktifkan perangkat bluetooth smartphone dan perangkat bluetooth HC-05 pada board mikrokontroler untuk melakukan pairing terlebih dahulu. Berikut adalah tampilan untuk melakukan proses pairing pada aplikasi smartphone.
39
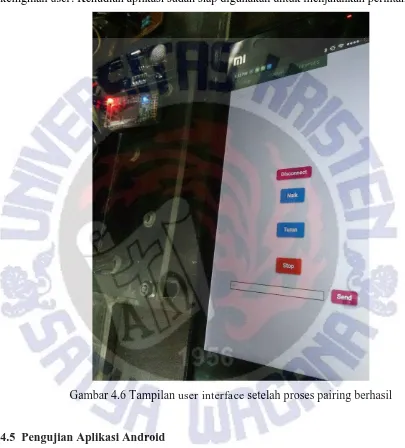
Kemudian langkah selanjutnya, pada aplikasi android akan membuka jalur komunikasi dengan cara mendeteksi ID bluetooth pada modul HC-05 yang ada pada perangkat board mikrokontroler. Setelah berhasil melakukan proses pairing, maka secara otomatis akan masuk pada tampilan user interface untuk menjalankan instruksi sesuai keinginan user. Kenudian aplikasi sudah siap digunakan untuk menjalankan perintah.
Gambar 4.6 Tampilan user interface setelah proses pairing berhasil
4.5 Pengujian Aplikasi Android
40 4.5.1 Pengujian Mode Manual
Pengujian mode manual ini meliputi semua yang ada didalam layer mode manual. Pada mode manual terdapat tiga tombol utama untuk mengontrol meja yaitu tombol “Naik”, tombol “Turun”, dan tombol “Stop”. Berikut hasil pengujian fungsi tombol pada modemanual.
Gambar 4.7 Tampilan user interface mode manual
Tabel 4.7 Hasil pengujian pengiriman data mode manual.
No. Keterangan Pengujian ke -
1 2 3 4 5
1. Naik Ok Ok Ok Ok Ok
2. Stop Ok Ok Ok Ok Ok
41
Pada pengujian mode manual ini dengan dilakukan sebanyak 5 kali untuk masing - masing pengujian fungsi tombol “Naik”, “Turun” dan “Stop”. Dari hasil percobaan untuk semua fungsi tombol dapat bekerja dengan baik dan berhasil menjalankan semua instruksi.
4.5.2 Pengujian Mode Otomatis
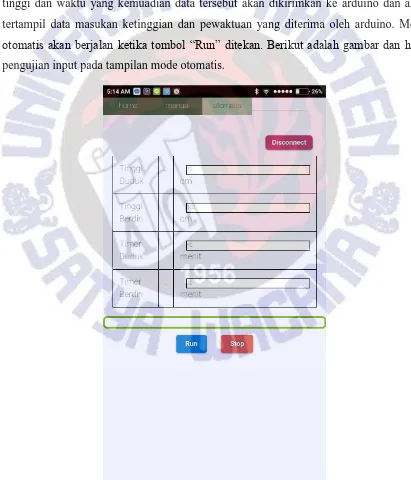
Pada mode otomatis terdapat tampilan layer inputan ketinggian dan pewaktuan. Pengujian pada menu otomatis dilakukan dengan memasukkan seluruh data pada kolom tinggi dan waktu yang kemuadian data tersebut akan dikirimkan ke arduino dan akan tertampil data masukan ketinggian dan pewaktuan yang diterima oleh arduino. Mode otomatis akan berjalan ketika tombol “Run” ditekan. Berikut adalah gambar dan hasil pengujian input pada tampilan mode otomatis.
42
Tabel 4.8 Hasil pengujian mode otomatis
No Tinggi (cm) Timer (menit) Hasil
Duduk Berdiri Duduk Berdiri
1 72 85 4 2 Sesuai disebabkan oleh data yang telah dikirim oleh aplikasi pada smartphone android tidak terbaca oleh arduino. Sehingga untuk mengirim data mode otomatis harus dikirim ulang.
4.6 Pengujian Smartphone Lain
Pada sub-bab ini, dijelaskan bahwa aplikasi diuji dengan menggunakan perangkat smartphone Android yang berbeda merek dan versi sistem operasi dengan default smartphone yang sebelumnya telah dijelaskan. Berikut merupakan tabel hasil pengujian dengan smartphone yang berbeda.
Tabel. 4.9 Hasil pengujian dengan smartphone yang berbeda.
43