i
Halaman Judul (Bahasa Indonesia)
TUGAS AKHIR
ROBOT PENGGAMBAR DENGAN MEKANISME
PANTOGRAF MENGGUNAKAN MOTOR STEPPER
BERBASIS ARDUINO
Diajukan untuk memenuhi salah satu syarat memperoleh gelar Sarjana Teknik pada
Program Studi Teknik Elektro Jurusan Teknik Elektro
Fakultas Sains dan Teknologi Universitas Sanata Dharma
Disusun Oleh : I KOMANG MAHARDIKA
NIM : 155114024
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
Halaman Judul (Bahasa Inggris)
FINAL PROJECT
ROBOT PLOTTER WITH PANTOGRAPH
MECHANISM USING STEPPER MOTOR BASED ON
ARDUINO
In a partial fulfilment of requirements For the degree of Sarjana Teknik Department of Electrical Engineering
Faculty of Science and Technology, Sanata Dharma University
I KOMANG MAHARDIKA NIM : 155114024
DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
vi
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP
MOTTO:
Belajar dari kegagalan adalah hal yang bijak…
Skripsi ini kupersembahkan untuk….
Tuhan Yang Maha Esa
Orangtuaku tercinta Bapak I NYOMAN ARA S.E., dan
Ibu NI MADE ARWATI
Program Studi Teknik Elektro Universitas Sanata Dharma
Sahabat dan Teman-teman Seperjuangan
Yogyakarta
viii
INTISARI
Proses pemesinan otomatis atau CNC (Computer Numerical Controll) adalah proses pembuatan produk berdasarkan gambar yang sudah diterjemahkan dalam bentuk g-code. Penerjemahan dari gambar menjadi g-code dilakukan secara manual dengan memasukkan fungsi-fungsi yang tersedia pada perintah-perintah g-code atau dengan menggunakan software open source. Penelitian ini menggunakan open source untuk mengubah gambar vektor menjadi g-code. Program ini untuk mensimulasikan proses penerjemahan tersebut.
Robot menjadi pilihan untuk membantu pekerjaan manusia mengatasi masalah kepresisian, keamanan, fleksibilitas, dan pekerjaan yang berulang-ulang. Lengan robot menjadi salah satu jenis robot yang dapat membantu pekerjaan manusia. Penelitian lengan robot ini dibuat untuk menggambar bidang 2 dimensi. Lengan robot ini menggunakan basis mikrokontroler Arduino Mega2560.
Lengan robot dalam penelitian ini mekanik berupa pantograf yang terdiri dari 4 link (4 ruas). Aktuator lengan robot adalah motor stepper. Lengan robot mendapatkan input dari PC (Personal Computer) dengan software dan open processing 3 untuk menggerakkan lengan robot. Data yang dikirim berupa pulsa digital dan komunikasi serial. Input berupa referensi bidang kotak, segitiga, dan lingkaran dengan parameter yang ditentukan.
Hasil dari penelitian yang telah dilakukan menggunakan plotter robot drawing menghasilkan tingkat keberhasilan robot untuk menggambar 2 dimensi secara berulang adalah 100% untuk referensi gambar kotak, segitiga, dan lingkaran. Maka dapat dikatakan percobaan plotter robot drawing ini berhasil sesuai dengan perancangan.
Kata Kunci: Pantograf, Arduino Mega2560, Komunikasi Serial, Lengan Robot, Processing
ix
ABSTRACT
The automatic machining process or CNC (Computer Numerical Controll) is the process of making products based on images that have been translated in the form of g-code. Translation of images into g-code is done manually by entering functions available in g-code commands or by using open source software. This research uses open source to convert vector images into g-code. This program is to simulate the translation process.
Robots are the choice to help human work overcome the problems of precision, security, flexibility, and repetitive work. Robot arms become one type of robot that can help human work. This robot arm research was made to draw 2-dimensional fields. This robot arm uses a base Arduino Mega2560 microcontroller.
The robot arm in this study was a mechanical pantograph consisting of 4 links (4 segments). The robot arm actuator is a stepper motor. Robot arms get input from PC (Personal Computer) with software and open processing 3 to move the robot arm. Data sent in the form of digital pulses and serial communication. Inputs are in the form of boxes, triangles and circles with the specified parameters.
The results of research that has been done using a robot drawing plotter produces a success rate of robots for drawing 2 dimensions repeatedly is 100% for reference to drawings of squares, triangles and circles. Then it can be said that this robot drawing plotter experiment was successful in accordance with the design.
Keywords: Pantograph, Arduino Mega2560, Serial Communication, Robot Arm, Processing 3.
xii
DAFTAR ISI
Halaman Judul (Bahasa Indonesia) ... i
Halaman Judul (Bahasa Inggris)... ii
LEMBAR PERSETUJUAN ... iii
LEMBAR PENGESAHAN ... iv
PERNYATAAN KEASLIAN KARYA ... v
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP ... vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ... vii
INTISARI ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xii
DAFTAR GAMBAR ... xiv
DAFTAR TABEL ... xvi
BAB I PENDAHULUAN ... 1 1.1 Latar Belakang ... 1 1.2 Tujuan ... 2 1.3 Manfaat ... 3 1.4 Batasan Masalah ... 3 1.5 Metode Penelitian ... 3
BAB II DASAR TEORI ... 5
2.1 Mikrokontroler ... 5 2.2 Arduino Mega 2560 ... 5 2.3 Gambar Bitmap ... 8 2.4 Gambar Vektor ... 8 2.5 Program mesin CNC ... 9 2.6 Inkscape ... 12 2.7 CAMotics ... 13 2.8 Motor Stepper ... 13 2.9 Driver Motor ... 17 2.10 Motor Servo ... 17
xiii
2.11 Kinematika ... 19
2.12 Invers Kinematika ... 19
2.12.1 Trigonometri ... 20
2.12.2 Pitagoras ... 20
BAB III RANCANGAN PENELITIAN ... 22
3.1 Blok Diagram ... 22
3.2 Perancangan Perangkat Lunak (Software) ... 23
3.3 Pantograf ... 24
3.4 Perancangan Perangkat Keras (Hardware) ... 25
3.4.1 Perancangan Mekanik Robot ... 25
BAB IV HASIL DAN PEMBAHASAN ... 29
4.1 Perancangan Perangkat Keras ... 29
4.1.1 Bentuk Mekanik Sistem Lengan Robot ... 29
4.1.2 Komponen Elektrik Sistem Lengan Robot ... 31
4.1.3 Pengujian Gerakan Mekanik Lengan Robot ... 32
4.2 Analisa Dan Pembahasan Perangkat Lunak ... 34
4.2.1. Pembahasan Program Pada Software Arduino Mega2560 ... 34
4.2.2. Pembahasan Pada Software Processing 3 ... 36
4.3 Analisa Hasil Pengujian Gambar Bidang Dua Dimensi ... 38
4.3.1 Analisa Hasil Gambar Kotak ... 39
4.3.2 Analisa Hasil Gambar Segitiga ... 40
4.3.3 Analisa Hasil Gambar Lingkaran ... 42
4.3.4 Hasil Pengujian Tingkat Keberhasilan ... 45
4.3.5 Hasil Pengujian Repeatability ... 45
BAB V KESIMPULAN DAN SARAN ... 46
5.1 Kesimpulan ... 46
5.2 Saran ... 46
DAFTAR PUSTAKA ... 47
xiv
DAFTAR GAMBAR
Gambar 1. 1. Blok diagram Robot Drawing Pantograf ... 4
Gambar 2. 1. Arduino Mega 2560 ... 5
Gambar 2. 2. Contoh Gambar Bitmap ... 8
Gambar 2. 3. Contoh Gambat Vektor ... 9
Gambar 2. 4. Pengukuran Absolute dan incremental ... 11
Gambar 2. 5. Intruksi G-code ... 11
Gambar 2. 6. Inkscape ... 12
Gambar 2. 7. CAMotics ... 13
Gambar 2. 8. Motor Stepper ... 14
Gambar 2. 9. Penampang melintang dari motor stepper tipe variable reluctance (VR) ... 14
Gambar 2. 10. Ilustrasi sederhana dari motor stepper tipe permanent magnet (PM) ... 15
Gambar 2. 11. Penampang melintang dari motor stepper tipe hybrid ... 15
Gambar 2. 12. Motor stepper dengan lilitan unipolar... 16
Gambar 2. 13. Motor stepper dengan lilitan bipolar... 16
Gambar 2. 14. Motor driver stepper ... 17
Gambar 2. 15. Prinsip kerja motor servo ... 18
Gambar 2. 16. Motor Servo ... 19
Gambar 2. 17. Kinematika Pantograf ... 20
Gambar 2. 18. Segitiga Siku-siku ... 20
Gambar 3. 1. Diagram Blok Keseluruhan Sistem ... 22
Gambar 3. 2. Diagram alir secara umum perangkat lunak (software) ... 23
Gambar 3. 3. Diagram alir pada mikrokontroler ... 24
Gambar 3. 4. Tampilan Keseluruhan Desain 3D Mekanik Pantograf ... 25
Gambar 3. 5. Desain 3D Mekanik Pantograf Tampak Atas ... 26
Gambar 3. 6. Desain 3D Mekanik Pantograf Tampak Bawah ... 26
Gambar 3. 7. Sudut β1 Gambar 3. 8. Sudut β5 ... 26
Gambar 3. 9. Tampilan koordinat sumbu axis (X,Y) dan Jarak Daerah Kerja Lengan Robot Pantograf ... 28
Gambar 4. 1. Mekanik Plotter Robot Drawing ... 29
xv
Gambar 4. 3. Posisi Motor Servo ... 31
Gambar 4. 4. Mekanik Plotter Robot Drawing ... 31
Gambar 4. 5. Cara Pengukuran Sudut Menggunakan Busur Derajat ... 33
Gambar 4. 6. Tampilan Software Arduino Mega2560 ... 34
Gambar 4. 7. Program Inisialisasi Motor Stepper Dan Motor Servo ... 35
Gambar 4. 8. Program Perintah G-code ... 35
Gambar 4. 9. Program Skala Untuk Mengatur Ukuran Gambar ... 36
Gambar 4. 10. Tampilan Pada Processing 3 ... 37
Gambar 4. 11. Tampilan simulasi CAMotics ... 37
Gambar 4. 12. Instruksi G-code... 38
Gambar 4. 13. Tampilan pada software paint ... 38
Gambar 4. 14. Hasil Pengujian Gambar Kotak ... 39
Gambar 4. 15. Hasil Pengujian Gambar Kotak ... 40
Gambar 4. 16. Hasil Pengujian Gambar segitiga... 41
Gambar 4. 17. Hasil Pengujian Gambar Segitiga ... 41
Gambar 4. 18. Hasil Pengujian Gambar Lingkaran... 43
Gambar 4. 19. Hasil Pengujian Gambar Lingkaran... 43
Gambar 4. 20. Pengujian Garis Lurus Horizontal ... 46
xvi
DAFTAR TABEL
Tabel 2. 1. Spesifikasi Arduino Mega2560 ... 6
Tabel 2. 2.Macam-macam G-code ... 10
Tabel 2. 3.Tegangan pulsa full step ... 107
Tabel 2. 4.Tegangan pulsa half step ... 17
Tabel 4. 1. perhitungan inverse kinematik dengan metode geometri pada titik referensi ... 32
Tabel 4. 2. Hasil Sudut Pengujian Dan Perhitungan Pada Gambar Bidang 2 Dimensi... 33
Tabel 4. 3. Pengujian Gambar Kotak ... 40
Tabel 4. 4. Pengujian Gambar segitiga ... 42
Tabel 4. 5. Pungijian Gambar Lingkaran Scale 100% ... 43
Tabel 4. 6. Pengujian Gambar Lingkaran Scale 50% ... 44
Tabel 4. 7. Pengujian Gambar Kotak, Segitiga, Dan Lingkaran ... 45
Tabel 4. 8. Pengujian Garis Lurus Horizontal ... 46
1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Dengan semakin pesatnya perkembangan IPTEK dalam bidang manufaktur (Pembuatan produk), proses pemesinan manual sudah mulai tergantikan oleh proses pemesinan otomatis. Meskipun di Indonesia proses pemesinan manual lebih sering digunakan dibanding otomatis, karena biaya yang tidak mencukupi. Pemesinan otomatis lebih banyak digunakan oleh industri-industri besar yang menuntut kecepatan dalam produksi dan kepresisian hasil produksi.
Robot drawing adalah robot yang nantinya dapat melakukan proses menulis ataupun
menggambar layaknya manusia. Permasalahan di negeri kita seperti pejabat tinggi yang harus menandatangani sejumlah sertifikat ataupun surat-surat penting yang akan ditanda tangani dengan manual. Maka diharapkan robot drawing akan mempermudah seseorang dalam pekerjaannya.
Dalam dunia industri sudah banyak yang menggunakan robot untuk pembuatan produk, tetapi sangat jarang digunakan untuk seorang pejabat-pejabat besar dalam mempermudah pekerajaannya sehari-hari.
Di akhir-akhir ini banyak yang telah membuat sebuah lengan robot yang dapat difungsikan untuk beraktivitas layaknya tangan manusia. Dalam pembuatan tangan robot ini membutuhkan biaya yang besar dibanding dengan robot drawing dua dimensi yang bergerak x, y, dan z.
Robot ini nantinya akan bergerak dengan sumbu x, y, dan z jarak kerja dari robot ini seluas A4. Robot drawing ini bergerak dengan sebuah motor stepper untuk gerakan x, y, dan z, robot ini dikendalikan dengan mikrokontroler berbasis Arduino.
Dalam perkembangan robot drawing di dunia, robot drawing mengalami banyak perubahan dari yang berupa lengan robot yang bisa menggambar, robot drawing dengan sumbu x, y, dan z.
Sistem robot lengan pada umumnya merupakan batang kaku yang terbuat dari logam, plastik, maupun bahan lain yang sering disebut dengan link. Antara link satu dengan link lainnya dihubungkan oleh persendian yang disebut joint. Umumnya prismatic joint dan flat
joint dapat menghasilkan pergeseran. Sedangkan shperis join dan revolute joint dapat
menghasilkan degree of freedom (DOF) atau derajat kebebasan. Degree of freedom (DOF) atau derajat kebebasan adalah jumlah arah yang independen dimana actuator dari sebuah robot dapat bergerak dan menghasilkan gerakan berputar. DOF dapat dihitung tiap sendi dan tidak termasuk end effector .Sedangkan end effector adalah piranti yang terpasang pada lengan robot untuk melaksanakan fungsi-fungsi tertentu. End effector terbagi menjadi dua yaitu gripper dan tool. End effector dan keseluruhan bagian robot lengan bekerja pada
workspace tertentu, tergantung kemampuan robot yang digunakan [1].
Pemrograman mesin cnc adalah masukan data ke komputer mesin cnc dengan bahasa yang dapat dipahami dan dimengerti oleh mesin. Bahasa yang dipakai berupa bahasa numerik yaitu bahasa gabungan huruf dan angka. Untuk melaksanakan perintah jalannya gerakan robot drawing guna mencapai tujuan yang diinginkan, diperlukan bahasa pemrograman berupa kode-kode dalam bentuk huruf dan angka serta metode pemrograman [2].
Untuk mengendalikan mesin menggunakan perangkat elektronik dalam hal ini era modern. Dengan otomatisasi dibidang mikrokontroler yang mudah digunakan dan ekonomis, memberikan kontrol penuh pada peralatan dengan fleksibilitas untuk mengubah program kapan dibutuhkan dan memahami umpan balik dari sensor untuk presisi dan akurasi membantu menghemat waktu dan tenaga yang juga menghabiskan lebih sedikit daya, membuat daya peralatan efisien. Tujuan dari pekerjaan ini adalah untuk membangun plotter murah yang dapat digunakan untuk tujuan pendidikan. Para penulis juga menemukan bahwa ada banyak ruang lingkup perbaikan dalam pekerjaan ini yang dapat digunakan untuk mengajarkan konsep lanjutan kepada siswa. Plotter umumnya digunakan untuk membuat plot 2D, dikontrol secara digital. Karya ini menambahkan dimensi ekstra dimana pena dapat diangkat sepanjang Sumbu Z.
Robot murah melayani banyak tujuan dalam pendidikan. Desain, kerja, antarmuka perangkat lunak dan perangkat keras dan biaya-biaya rendah plotter akan menjadi detail di bagian selanjutnya.
1.2 Tujuan
Tujuan dari penelitian ini secara umum adalah untuk menghasilkan suatu prototype
plotter robot drawing dengan penggerak motor stepper sebagai penggerak mekanik
dari personal computer (PC). Secara khusus dari penelitian ini bertujuan untuk menerjemahkan beberapa gambar vektor bidang 2 dimensi kedalam bentuk g-code. G-code akan diimplementasikan pada software CNC.
Penelitian ini memiliki manfaat yang dapat membantu pekerjaan manusia dalam
design 2 dimensi sebagai masukan/input untuk melakukan kegiatan industri karena mesin CNC dapat melakukan pekerjaan secara presisi, aman dan dapat melakukan perkerjaan
secara berulang dengan mengikuti pola tertentu seperti pemotongan sebuah gabus, pengecatan dan kegiatan otomasi industri lainnya.
1.3 Manfaat
1. Bagi Pendidikan
Diharapkan robot drawing ini dapat membantu dalam pengetahuan kita bahwa membantu pemahaman anak dalam belajar subjek sains, teknologi, teknik.
2. Bagi Masyarakat
Diharapkan robot drawing ini akan dapat membantu masyarakat dalam perkerjaannya.
1.4 Batasan Masalah
Pembatasan masalah dimaksudkan untuk mempermudah pelaksanaan penelitian maupun penulisan skripsi sehingga tidak terjadi kesalahan dalam menerjemahkan judul yang dimaksud. Batasan masalah untuk penelitian ini adalah:
a. Daerah kerja ukuran A4.
b. Metode menggambar dua dimensi (gambar vektor) pada personal komputer. c. Pada gambar 2 dimensi pada sumbu X Y Z.
d. Mikrokontroler arduino.
e. Inkscape mengubah gambar vektor menjadi file g-code. f. CAMotics membaca dan mensimulasikan file g-code. g. Processing 3 memproses program file g-code.
1.5 Metode Penelitian
1) Mempelajari buku-buku dan makalah dari pustaka yang berhubungan dengan pembuatan Huruf atau gambar dua dimensi Inkscape dan pemrograman g-code.
2) Pembuatan file g-code pada software inkscape.
3) Proses pengujian penelitian data. Dengan cara menguji file g-code yang dibuat dengan software inksape untuk menerjemahkan gambar vektor menjadi bentuk
g-code.
4) Munguji motor stepper dan servo.
5) Desain gambar robot drawing dengan menggunakan software Sketchup .
6) Pembacaan file g-code dengan menggunakan CAMotics untuk diimplementasikan pada robot drawing.
7) Perancangan sistem hardware, tahap ini bertujuan untuk menentukan model yang optimal dan menentukan komponen-komponen suatu sistem yang akan dibuat dengan mempertimbangkan faktor-faktor permasalahan dan kebutuhan yang telah ditentukan.
Gambar 1. 1. Blok diagram Robot Drawing Pantograf Arduino 2560 (Bagian Pengendali) Personal Computer (PC) Inkscape CAMotics Motor (Motor Stepper &
Motor Servo)
5
BAB II
DASAR TEORI
2.1 Mikrokontroler
Mikrokontroler adalah salah satu dari bagian dasar dari suatu sistem komputer. Meskipun mempunyai bentuk yang jauh lebih kecil dari suatu komputer pribadi dan komputer mainframe, mikrokontroler dibangun dari elemen-elemen dasar yang sama. Secara sederhana, komputer akan menghasilkan output spesifik berdasarkan inputan yang diterima dan program yang dikerjakan.
Seperti umumnya komputer, mikrokontroler adalah alat yang mengerjakan instruksi-instruksi yang diberikan kepadanya. Artinya, bagian terpenting dan utama dari suatu sistem terkomputerisasi adalah program itu sendiri yang dibuat oleh seorang programmer. Program ini menginstruksikan komputer untuk melakukan jalinan yang panjang dari aksi-aksi sederhana untuk melakukan tugas yang lebih kompleks yang diinginkan oleh programmer.
2.2 Arduino Mega 2560
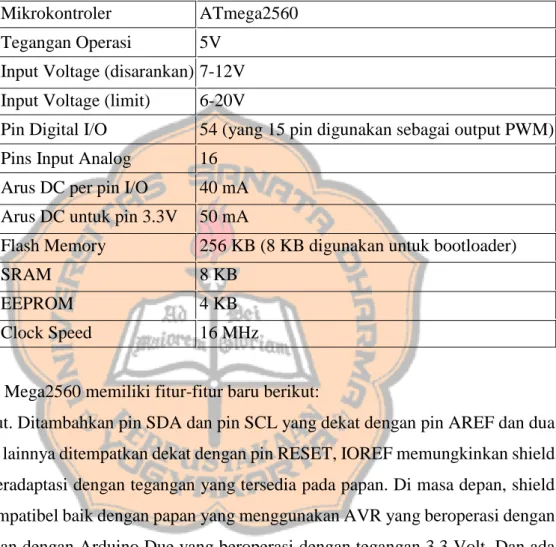
Gambar 2. 1. Arduino Mega 2560 [3]
Arduino Mega2560 adalah papan mikrokontroler berbasiskan ATmega2560 (datasheet ATmega2560). Arduino Mega2560 memiliki 54 pin digital input/output, dimana 15 pin dapat digunakan sebagai output PWM, 16 pin sebagai input analog, dan 4 pin sebagai UART (port serial hardware), 16 MHz kristal osilator, koneksi USB, jack power, header ICSP, dan tombol reset. Ini semua yang diperlukan untuk mendukung mikrokontroler. Cukup dengan menghubungkannya ke komputer melalui kabel USB atau power dihubungkan dengan adaptor AC-DC atau baterai untuk mulai mengaktifkannya [3].
Arduino Mega2560 kompatibel dengan sebagian besar shield yang dirancang untuk Arduino Duemilanove atau Arduino Diecimila. Arduino Mega2560 adalah versi terbaru yang menggantikan versi Arduino Mega.
Dibawah ini adalah spesifikasi sederhana dari Arduino Mega2560:
Tabel 2. 1. Spesifikasi Arduino Mega2560 Mikrokontroler ATmega2560
Tegangan Operasi 5V Input Voltage (disarankan) 7-12V Input Voltage (limit) 6-20V
Pin Digital I/O 54 (yang 15 pin digunakan sebagai output PWM) Pins Input Analog 16
Arus DC per pin I/O 40 mA Arus DC untuk pin 3.3V 50 mA
Flash Memory 256 KB (8 KB digunakan untuk bootloader)
SRAM 8 KB
EEPROM 4 KB
Clock Speed 16 MHz
Arduino Mega2560 memiliki fitur-fitur baru berikut:
a. 10 pinout. Ditambahkan pin SDA dan pin SCL yang dekat dengan pin AREF dan dua pin baru lainnya ditempatkan dekat dengan pin RESET, IOREF memungkinkan shield untuk beradaptasi dengan tegangan yang tersedia pada papan. Di masa depan, shield akan kompatibel baik dengan papan yang menggunakan AVR yang beroperasi dengan 5 Volt dan dengan Arduino Due yang beroperasi dengan tegangan 3.3 Volt. Dan ada dua pin yang tidak terhubung, yang disediakan untuk tujuan masa depan.
b. Sirkuit RESET.
c. Chip ATmega16U2 menggantikan chip ATmega8U2.
Papan Arduino ATmega2560 dapat beroperasi dengan pasokan daya eksternal 6 Volt sampai 20 Volt. Jika diberi tegangan kurang dari 7 Volt, maka, pin 5 Volt mungkin akan menghasilkan tegangan kurang dari 5 Volt dan ini akan membuat papan menjadi tidak stabil. Jika sumber tegangan menggunakan lebih dari 12 Volt, regulator tegangan akan mengalami
panas berlebihan dan bisa merusak papan. Rentang sumber tegangan yang dianjurkan adalah 7 Volt sampai 12 Volt. Selain itu, beberapa pin memiliki fungsi khusus :
a. Serial : 0 (RX) dan 1 (TX); Serial 1 : 19 (RX) dan 18 (TX); Serial 2 : 17 (RX) dan 16 (TX); Serial 3 : 15 (RX) dan 14 (TX). Digunakan untuk menerima (RX) dan mengirimkan (TX) data serial TTL. Pin 0 dan 1 juga terhubung ke pin chip ATmega16U2 Serial USB-to-TTL.
b. Eksternal Interupsi : Pin 2 (interrupt 0), pin 3 (interrupt 1), pin 18 (interrupt 5), pin 19 (interrupt 4), pin 20 (interrupt 3), dan pin 21 (interrupt 2). Pin ini dapat dikonfigurasi untuk memicu sebuah interupsi pada nilai yang rendah, meningkat atau menurun, atau perubah nilai.
c. SPI : Pin 50 (MISO), pin 51 (MOSI), pin 52 (SCK), pin 53 (SS). Pin ini mendukung komunikasi SPI menggunakan perpustakaan SPI. Pin SPI juga terhubung dengan header ICSP, yang secara fisik kompatibel dengan Arduino Uno, Arduino Duemilanove dan Arduino Diecimila.
d. LED : Pin 13. Tersedia secara built-in pada papan Arduino ATmega2560. LED terhubung ke pin digital 13. Ketika pin diset bernilai HIGH, maka LED menyala (ON), dan ketika pin diset bernilai LOW, maka LED padam (OFF).
e. TWI : Pin 20 (SDA) dan pin 21 (SCL). Yang mendukung komunikasi TWI menggunakan perpustakaan Wire. Perhatikan bahwa pin ini tidak di lokasi yang sama dengan pin TWI pada Arduino Duemilanove atau Arduino Diecimila.
Arduino Mega2560 memiliki 16 pin sebagai analog input, yang masing-masing pin menyediakan resolusi 10 bit (yaitu 1024 nilai yang berbeda). Secara default pin ini dapat diukur/diatur dari Ground sampai dengan 5 Volt, juga memungkinkan untuk mengubah titik jangkauan tertinggi atau terendah menggunakan pin AREF dan fungsi analogReference. Ada beberapa pin lainnya yang tersedia, antara lain:
a. AREF : Referensi tegangan untuk input analog. Digunakan dengan fungsi analog Reference.
b. RESET : Jalur LOW ini digunakan untuk me-reset (menghidupkan ulang) mikrokontroler. Jalur ini biasanya digunakan untuk menambahkan tombol reset pada shield yang menghalangi papan utama Arduino.
2.3 Gambar Bitmap
Gambar bitmap merupakan duplikat atau tiruan persis dari gambar asli dalam bentuk gambar digital. Gambar jenis ini tersusun dari sejumlah titik pixel (picture
element)/dot/point/titik koordinat yang ditempatkan pada lokasi-lokasi tertentu dengan nilai
warna tersendiri sehingga membentuk pola tertentu di layar komputer. Pola yang terbentuk itulah yang menghasilkan atau menimbulkan kesan gambar. Pixel merupakan elemen terkecil citra digital yang dapat dilihat mata. Semakin banyak jumlah pixel, berarti semakin tinggi tingkat kerapatannya dan semakin halus gambar yang terbentuk. Akibatnya, semakin besar pula ukuran file gambar tersebut. Banyaknya titik dalam 1 inchi dikenal dengan dpi (dot per inchi). Anda dapat mengenali gambar bitmap dari file komputer yang berekstensi .bmp, .jpg, .tfi, .gif, .png, .pix, .pcx, dan sebagainya. Berikut adalah contoh gambar Bitmap pada gambar 2.2 [4].
Gambar 2. 2. Contoh Gambar Bitmap [4]
2.4 Gambar Vektor
Gambar Vektor adalah gambar yang tersusun oleh sekumpulan garis, kurva, dan bidang tertentu dengan menggunakan serangkaian instruksi yang masing-masing didefinisikan secara matematis. Setiap garis, kurva, dan bidang tertentu tersebut mempunyai vektor atau atribut masing-masing berupa fill, stroke, dan node. Gambar vektor tidak dipengaruhi oleh resolusi gambar atau titik pixel (dpi) seperti pada gambar bitmap [4].
Keluaran file dari jenis gambar vektor biasanya menyesuaikan dari jenis program yang digunakan:
1. Corel Draw output filenya .cdr 2. Freehand output filenya .fh11 3. Illustrator output filenya .ai
Gambar 2. 3. Contoh Gambat Vektor [4]
2.5 Program mesin CNC
Pemrograman dengan mesin CNC, dapat dilakukan dengan 2 macam cara, yaitu: a Pemrograman manual
Pemrograman dengan cara manual adalah pemrograman dengan cara memasukan data ke-mesin dengan mengetik tombol-tombol masukan data melalui keyboard yang terdapat pada pengendali mesin.
b Pemrograman otomatis
Pemrograman otomatis adalah pemrograman dengan memasukan data ke mesin melalui perangkat lunak (disket, kaset, dan flashdisk, serta interface232) melalui kontak layanan kaset yang tersedia pada panel pengendali mesin [2].
Secara umum, program NC memiliki konstruksi tertentu, yaitu kode atau perintah pendahuluan dan perintah pembantu. Perintah pendahuluan umumnya menggunakan kode G, sedangkan perintah pembantu menggunakan fungsi M. Program NC, selain kode G dan M, di dalamnya terdiri dari sejumlah kode-kode perintah yang tersusun dalam bentuk kombinasi huruf-huruf tertentu dan angka. Kode berupa huruf, misalnya N, T, S, F, H, I, J, K, R, D, X, Y, Z, dan angka 0 sampai 9 disebut addres. Suatu kode huruf yang di belakangnya diikuti angka (kombinasi huruf dan angka) disebut ”kata” (word). Gabungan dari beberapa kata disebut ”blok”.
”Blok” merupakan gabungan dari beberapa kata yang membentuk satu tahapan perintah, misalnya deretan melintang bergerak lurus sejauh 4 mm mendekati sumbu dengan kecepatan 80 mm/menit. Di dalam sebuah program CNC, satu tahapan perintah ditulis dalam satu baris, berarti ”blok” adalah gabungan beberapa kata yang ditulis dalam satu baris
program. Komputer (unit kontrol) mesin membaca dan menjalankan program per satu blok bukan per kata.
Kode G ( “G-code” ) terbagi dalam 2 tipe: 1. Tipe “One-Shot G-code”
G-code akan aktif hanya dalam 1 blok saja (aktif hanya sekali). Jika masih
digunakan untuk Blok berikutnya, maka harus dipanggil lagi 2. Tipe “Modal G-code”
G-code akan aktif digunakan terus pada Blok-blok berikutnya sampai ada G-code
lain yang sama dalam satu grup dipanggil. Model G-code antara lain:
G00, G01, (G02), (G03), G17, G18, G19, G20, G21, G40, G41, G42, G80, G81, G82, G83, G90, G91
Berikut merupakan tabel macam-macam G-code:
Tabel 2. 2.Macam-macam G-code [6]
G-code Kegunaan
G00 Gerakan Lurus Cepat (tanpa pemakanan)
G01 Gerak Interpolasi Lurus (dengan pemakanan)
G02 Gerak Interpolasi Melingkar searah jarum jam G03 Gerak Interpolasi Melingkar berlawanan arah jarum jam
G90 Perintah Absolut
G91 Perintah Inkremental
Untuk mengetahui lebih jelas fungsi dari G-code dapat dilihat dibawah ini: 1) G00, Perintah gerakan lurus cepat
G00 berfungsi untuk menempatkan (memposisikan) pahat secara cepat dan tidak menyayat benda kerja. Semua sumbu bisa bergerak secara simultan sehingga menghasilkan jalur lurus.
2) G01, Perintah gerakan interpolasi lurus
G01 berfungsi untuk menggerakkan pahat dari titik awal menuju titik akhir dengan gerakan lurus.
3) G02 dan G03, Perintah gerakan interpolasi melingkar searah jarum jam dan berlawanan jarum jam.
G02 dan G03 berfungsi untuk menggerakkan pahat dari titik awal ke titik akhir mengikuti gerakan melingkar.
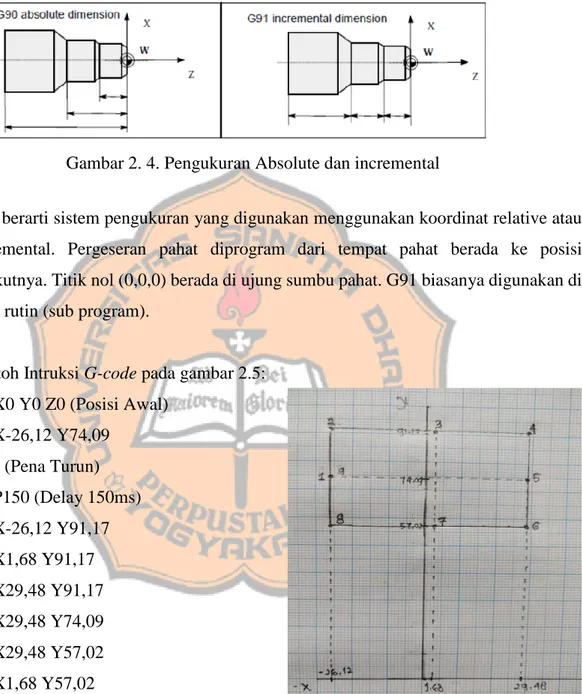
Apabila di awal program CNC ditulis G90, maka pemosisian pahat yang diperintahkan menggunakan kordinat absolut dari titik nol benda kerja. Titik nol benda kerja adalah sebagai titik nol absolut atau (0,0,0). Berikut untuk memahami hal tersebut dapat dilihat pada gambar dibawah:
Gambar 2. 4. Pengukuran Absolute dan incremental
G91 berarti sistem pengukuran yang digunakan menggunakan koordinat relative atau incremental. Pergeseran pahat diprogram dari tempat pahat berada ke posisi berikutnya. Titik nol (0,0,0) berada di ujung sumbu pahat. G91 biasanya digunakan di awal rutin (sub program).
Contoh Intruksi G-code pada gambar 2.5: G1 X0 Y0 Z0 (Posisi Awal) G1 X-26,12 Y74,09 M30 (Pena Turun) G4 P150 (Delay 150ms) G1 X-26,12 Y91,17 G1 X1,68 Y91,17 G1 X29,48 Y91,17 G1 X29,48 Y74,09 G1 X29,48 Y57,02 G1 X1,68 Y57,02
G1 X-26,12 Y57,02 Gambar 2. 5. Intruksi G-code
G1 X-26,12 Y74,09 M300 S50 (Pen Up) G4 P150
2.6 Inkscape
Inkscape adalah sebuah perangkat lunak editor gambar vektor yang bersifat bebas
terbuka dibawah lisensi GNU GPL. Tujuan utama dari Inkscape adalah membuat perangkat grafik mutakhir yang memenuhi standar XML, SVG, dan CSS.
Inkscape tersedia untuk sistem operasi Windows, Macintosh, dan Linux. Program dan
kode sumber (source kode) Inkscape tersedia untuk umum pada situs resmi Inkscape sehingga siapapun dapat mempelajari dan mengembangkannya [6].
Inkscape dapat digunakan untuk membuat gambar vektor untuk berbagai kebutuhan,
misalnya untuk membuat gambar ilustrasi pada web, ikon untuk smartphone, gambar kartun atau animasi, membuat garis sederhana, kaligrafi, logo, brosur, dan masih banyak lagi.
Format gambar yang dibuat menggunakan Inkscape sangat handal dan dapat disebarkan melalui internet dengan mudah karena ukurannya lebih kecil dibandingkan dengan format yang dibuat menggunakan aplikasi lain yang sejenis. Dukungan untuk berbagai format telah ditambahkan termasuk untuk berbagai browser dan smartphone masa kini.
Inkscape mendukung gambar dengan bentuk biasa (misal; persegi panjang dan
lingkaran), garis, dan teks. Setiap object dapat dimodifikasi dan diberi warna sendiri. Hiperlink dapat ditambahkan sehingga gambar dapat digunakan dalam web browser karena program Inkscape tujuannya untuk membuat gambar dengan format XML, SVG, dan kampatible dengan script CSS. Saat ini Inkscape masih terus dikembangkan, hal ini dapat dilihat dengan adanya penambahan fitur dan antarmuka baru secara rutin pada setiap rilis versi baru.
Gambar 2. 6. Inkscape
Masukkan pada alat penelitian ini berupa gambar digital. Gambar yang dihasilkan harus memiliki kemiripan dengan gambar digital. Software yang akan digunakan untuk mendesain gambar adalah inkscape. Inkscape adalah sebuah perangkat lunak editor gambar
vektor yang bersifat Open-Source. Gambar digital yang akan digunakan sebagai masukkan harus terlebih dahulu di konversi menjadi g-code. G-code adalah kode posisi untuk alat agar alat bergerak ke posisi yang seharusnya. Untuk mengkonversi gambar menjadi g-code dibutuhkan sebuah software. Untuk mengubah gambar menjadi g-code, inkscape membutuhkan plugin tambahan bernama gcodetools. Dengan plugin tersebut gambar yang telah didesain menggunakan inkscape dapat dibuah menjadi g-code. CAMotics adalah
software yang diperlukan untuk mengirim g-code ke mikrokontroler.
2.7 CAMotics
CAMotics dapat digunakan untuk mensimulasikan program 3-axis G-code untuk CNC
dan memvisualisasikan hasilnya dalam 3D. CAMOTOS berjalan di Linux, OS-X atau Windows. CAMotics bertujuan untuk menjadi platform simulasi CNC yang berguna untuk komunitas DIY dan sumber terbuka. CAMOTIC memfasilitasi tugas simulasi spesifik seperti ukiran dan pemotongan papan PCB serta teknik simulasi yang lebih canggih dan antarmuka pemrograman. CAMOTIC digunakan untuk menulis kode CNC dan memvisualisasikan gerakan yang dihasilkan dari alat dan/atau benda kerja [7].
Gambar 2. 7. CAMotics
2.8 Motor Stepper
Motor Stepper merupakan salah satu jenis motor yang banyak digunakan saat ini sebagai aktuator, misalnya sebagai penggerak head baca/tulis pada disk drive yang akan menetapkan posisi head baca/tulis di atas permukaan piringan disket, penggerak head pada printer dan line feed control, dan yang lebih populer saat ini adalah aplikasi dalam bidang robotik. Dengan bantuan mikroprosesor atau mikrokontroler perputaran motor dapat dikontrol dengan tepat dan terprogram [8].
Gambar 2. 8. Motor Stepper
Motor stepper memiliki 3 jenis yaitu tipe Variable reluctance (VR), tipe permanent
magnet (PM), dan tipe hybrid (HB).
1. Motor stepper tipe Variable reluctance (VR)
Motor stepper jenis ini telah lama ada dan merupakan jenis motor yang secara struktural paling mudah untuk dipahami. Motor ini terdiri atas sebuah rotor besi lunak dengan beberapa gerigi dan sebuah lilitan stator. Ketika lilitan stator diberi energi dengan arus DC, kutub-kutubnya menjadi termagnetasi. Perputaran terjadi ketika gigi-gigi rotor tertarik oleh kutub-kutub stator. Berikut ini adalah penampang melintang dari motor stepper tipe variable reluctance (VR) yang ditunjukkan pada gambar 2.8:
Gambar 2. 9. Penampang Melintang Dari Motor Stepper Tipe Variable Reluctance (VR)
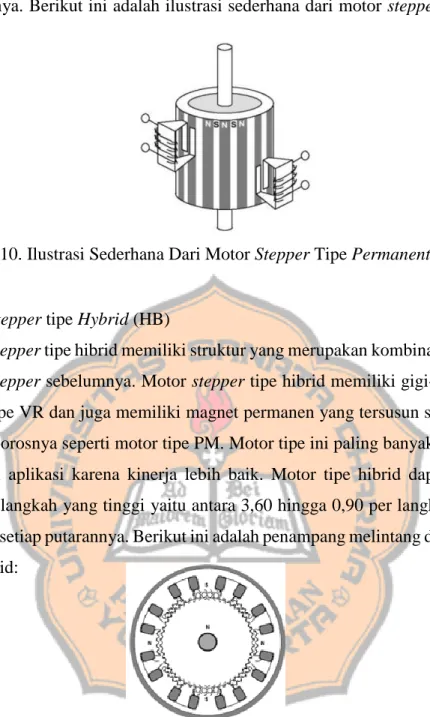
2. Motor stepper tipe Permanent Magnet (PM)
Motor stepper jenis ini memiliki rotor yang berbentuk seperti kaleng bundar (tin can) yang terdiri atas lapisan magnet permanen yang diselang-seling dengan kutub yang berlawanan (perhatikan gambar 2.9). Dengan adanya magnet permanen, maka intensitas fluks magnet dalam motor ini akan meningkat sehingga dapat menghasilkan
torsi yang lebih besar. Motor jenis ini biasanya memiliki resolusi langkah (step) yang
putarannya. Berikut ini adalah ilustrasi sederhana dari motor stepper tipe permanent
magnet:
Gambar 2. 10. Ilustrasi Sederhana Dari Motor Stepper Tipe Permanent Magnet (PM)
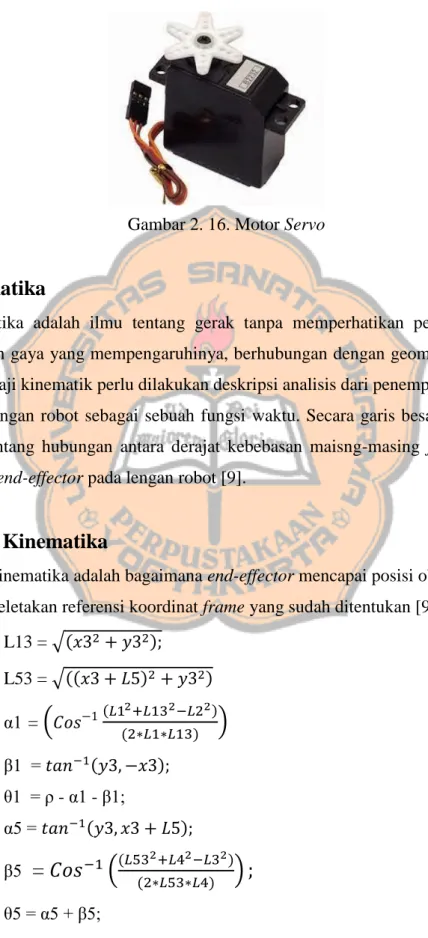
3. Motor stepper tipe Hybrid (HB)
Motor stepper tipe hibrid memiliki struktur yang merupakan kombinasi dari kedua tipe motor stepper sebelumnya. Motor stepper tipe hibrid memiliki gigi-gigi seperti pada motor tipe VR dan juga memiliki magnet permanen yang tersusun secara aksial pada batang porosnya seperti motor tipe PM. Motor tipe ini paling banyak digunkan dalam berbagai aplikasi karena kinerja lebih baik. Motor tipe hibrid dapat menghasilkan resolusi langkah yang tinggi yaitu antara 3,60 hingga 0,90 per langkah atau 100-400 langkah setiap putarannya. Berikut ini adalah penampang melintang dari motor stepper tipe hibrid:
Gambar 2. 11. Penampang Melintang Dari Motor Stepper Tipe Hybrid
Berdasarkan metode perancangan rangkain pengendalinya, motor stepper dapat dibagi menjadi jenis unipolar dan bipolar. Rangkaian pengendali motor stepper unipolar lebih mudah dirancang karena hanya memerlukan satu switch / transistor setiap lilitannya. Untuk menjalankan dan menghentikan motor ini cukup dengan menerapkan pulsa digital yang hanya terdiri atas tegangan positif dan nol (ground) pada salah satu terminal lilitan (wound) motor sementara terminal lainnya dicatu dengan tegangan positif konstan (VM) pada bagian tengah (center tap) dari lilitan (perhatikan gambar 2.11)
.
Gambar 2. 12. Motor Stepper Dengan Lilitan Unipolar
Untuk motor stepper dengan lilitan bipolar, diperlukan sinyal pulsa yang berubah-ubah dari positif ke negatif dan sebaliknya. Jadi pada setiap terminal lilitan (A & B) harus dihubungkan dengan sinyal yang mengayun dari positif ke negatif dan sebaliknya (perhatikan gambar 2.12). Karena itu dibutuhkan rangkaian pengendali yang agak lebih kompleks daripada rangkaian pengendali untuk motor unipolar. Motor
stepper bipolar memiliki keunggulan dibandingkan dengan motor stepper unipolar
dalam hal torsi yang lebih besar untuk ukuran yang sama.
Gambar 2. 13. Motor Stepper Dengan Lilitan Bipolar
Motor stepper yang digunakan adalah tipe nema 17-2 phase hybrid stepper motor. Motor stepper ini memiliki spesifikasi sebagai berikut. Memiliki step angel sebesar 1,8 derajat dengan voltase 2,8 V dan arus 1,7 A memiliki holding torque sebesar 40 N.cm dengan berat 0,28 Kg. Pada dasarnya motor stepper bergerak karena adanya pulsa masukkan dari
driver motor stepper.
Motor stepper umumnya mempunyai mode pergerakan full step dan half step. Tabel 2.3 merupakan tabel tegangan pulsa masukan untuk mode full step dan tabel 2.4 merupakan tabel tegangan pulsa masukan mode half step. Pada mode full step suatu titik pada sebuah
kutub magnet rotor akan mendapat tarikan medan magnet stator pada lilitan yang sama setelah step ke-4. Sedangkan mode half step suatu titik pada sebuah kutub magnet rotor akan mendapat tarikan medan magnet stator pada lilitan yang sama setelah step ke-8.
Tabel 2. 3.Tegangan pulsa full step
Tabel 2. 4.Tegangan pulsa half step
2.9 Driver Motor
Gambar 2. 14. Motor Driver Stepper
DRV8825 stepper motor driver seperti yang ditunujukan gambar 2.8. adalah modul
penggerak yang digunakan untuk mengendalikan motor stepper mulai dari full step sampai 1/32 step. Kapasitas output driver dari 8,2 Volt sampai 45 Volt dan arus mencapai 1,5 A.
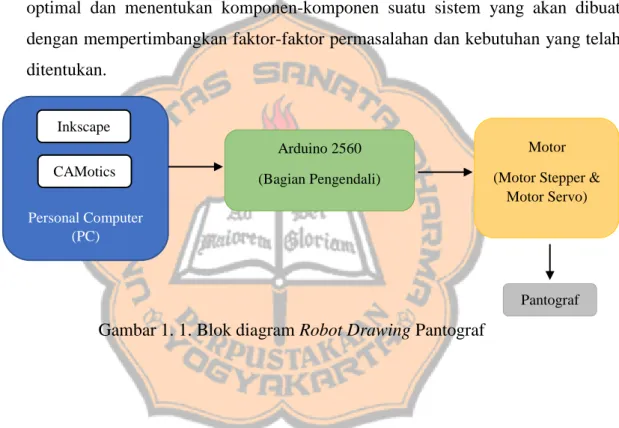
2.10 Motor Servo
Motor servo adalah sebuah motor dengan sistem closed feedback di mana posisi dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor ini terdiri dari sebuah motor, serangkaian gear, potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas sudut dari putaran servo. Sedangkan sudut
dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor.
Motor servo biasa digunakan dalam aplikasi-aplikasi di industri, selain itu juga digunakan dalam berbagai aplikasi lain seperti pada mobil mainan radio kontrol, robot, pesawat, dan lain sebagainya.
Ada dua jenis motor servo, yaitu motor servo AC dan DC. Motor servo AC lebih dapat menangani arus yang tinggi atau beban berat, sehingga sering diaplikasikan pada mesin-mesin industri. Sedangkan motor servo DC biasanya lebih cocok untuk digunakan pada aplikasi-aplikasi yang lebih kecil. Dan bila dibedakan menurut rotasinya, umumnya terdapat dua jenis motor servo yang dan terdapat di pasaran, yaitu motor servo rotation 180⁰ dan servo rotation continuous:
1) Motor servo standard (servo rotation 180⁰) adalah jenis yang paling umum dari motor servo, dimana putaran poros outputnya terbatas hanya 90⁰ kearah kanan dan 90⁰ kearah kiri. Dengan kata lain total putarannya hanya setengah lingkaran atau 180⁰.
2) Motor servo rotation continuous merupakan jenis motor servo yang sebenarnya sama dengan jenis servo standard, hanya saja perputaran porosnya tanpa batasan atau dengan kata lain dapat berputar terus, baik ke arah kanan maupun kiri.
Gambar 2. 15. Prinsip kerja motor servo
Prinsip kerja motor servo, Motor servo dikendalikan dengan memberikan sinyal modulasi lebar pulsa (Pulse Wide Modulation / PWM) melalui kabel kontrol. Lebar pulsa sinyal kontrol yang diberikan akan menentukan posisi sudut putaran dari poros motor servo. Sebagai contoh, lebar pulsa dengan waktu 1,5 ms (mili detik) akan memutar poros motor servo ke posisi sudut 90⁰. Bila pulsa lebih pendek dari 1,5 ms maka akan berputar ke arah
posisi 0⁰ atau ke kiri (berlawanan dengan arah jarum jam), sedangkan bila pulsa yang diberikan lebih lama dari 1,5 ms maka poros motor servo akan berputar ke arah posisi 180⁰ atau ke kanan (searah jarum jam).
Gambar 2. 16. Motor Servo
2.11 Kinematika
Kinematika adalah ilmu tentang gerak tanpa memperhatikan penyebabnya salah satunya adalah gaya yang mempengaruhinya, berhubungan dengan geometri dari gerakan. Dalam mengkaji kinematik perlu dilakukan deskripsi analisis dari penempatan posisi secara spasial dari lengan robot sebagai sebuah fungsi waktu. Secara garis besar, kinematika ini membahas tentang hubungan antara derajat kebebasan maisng-masing joint, posisi serta orientasi dari end-effector pada lengan robot [9].
2.12 Invers Kinematika
Invers kinematika adalah bagaimana end-effector mencapai posisi objek dengan baik berdasarkan peletakan referensi koordinat frame yang sudah ditentukan [9].
L13 = √(𝑥32+ 𝑦32); (2-1) L53 = √((𝑥3 + 𝐿5)2+ 𝑦32) (2-2) α1 = (𝐶𝑜𝑠−1(𝐿12+𝐿132−𝐿22) (2∗𝐿1∗𝐿13)
)
(2-3) β1 = 𝑡𝑎𝑛−1(𝑦3, −𝑥3); (2-4) θ1 = ρ - α1 - β1; (2-5) α5 = 𝑡𝑎𝑛−1(𝑦3, 𝑥3 + 𝐿5); (2-6) β5 = 𝐶𝑜𝑠−1(
(𝐿532+𝐿42−𝐿32) (2∗𝐿53∗𝐿4)) ;
(2-7) θ5 = α5 + β5; (2-8)Gambar 2. 17. Kinematika Pantograf
2.12.1 Trigonometri
Trigonometri matematika mempunyai tiga fungsi yang pertama ialah sinus yang merupakan perbandingan sisi segitiga (segitiga siku – siku atau salah satu sudut segitiga itu 90°) yang ada di depan sudut dengan sisi miring, lalu fungsi trigonometri kedua ialah kosinus atau cosinus yang merupakan perbandingan sisi segitiga yang terletak disudut dengan sisi miring dan fungsi dasar trigonometri matematika yang ketiga ialah tangen yang merupakan perbandingan sisi segitiga yang ada di depan sudut dengan sisi segitiga yang terletak disudut. 𝑠𝑖𝑛𝐴 =𝑎 𝑏 𝑐𝑜𝑠𝐴 =𝑐 𝑏 𝑡𝑎𝑛𝐴 =𝑠𝑖𝑛𝐴 𝑐𝑜𝑠𝐴= 𝑎 𝑐 𝑐𝑜𝑠𝛼 =𝑏2+𝑐2−𝑎2 2𝑏𝑐
2.12.2 Pitagoras
Gambar 2. 18. Segitiga Siku-siku L1=L12
L2=L23 L3=L34
L4=L45 L5=L15
Segitiga di atas merupakan segitiga siku-siku yang memiliki satu sisi tegak (BC), satu sisi mendatar (AB), dan satu sisi miring (AC). Dalil pythagoras atau rumus pythagoras berfungsi untuk mencari salah satu sisi dengan kedua sisi diketahui.
𝑎 = √𝑏
2− 𝑐
2𝑏 = √𝑎
2+ 𝑐
2𝑐 = √𝑏
2− 𝑎
222
BAB III
RANCANGAN PENELITIAN
Bab ini akan menjelaskan perancangan pembuatan perangkat lunak (software) untuk masukan (input) gerakan lengan robot. Masukan (input) untuk gerakan lengan robot yaitu berupa gambar vektor bidang 2D yang diubah menjadi file g-code. Perangkat lunak (software) yang digunakan untuk mengubah gambar vektor menjadi g-code adalah inkscape.
3.1 Blok Diagram
Sistem ini terbagi menjadi 3 bagian utama yang akan dikerjakan blok diagram keseluruhan sistem dapat dilihat pada gambar 3.1 dibawah ini:
Gambar 3. 1. Diagram Blok Keseluruhan Sistem
Dalam blok diagram ini terdapat 3 bagian utama sistem yang memiliki peran masing-masing. Pada bagian pertama yaitu input meliputi proses pembuatan desain (gambar vektor),
g-code generator, hingga menjadi g-code. Pada pengolahan gambar vektor menjadi g-code
menggunakan software inkscape. Kemudian gambar dari olahan inkscape dibaca nilai
g-code nya menggunakan software CAMotics. Bagian kedua yaitu controller meliputi proses
pengolahan data g-code dikirim ke driver motor untuk menggerakkan motor stepper. Motor servo digunakan untuk mengangkat pena saat perpindahan titik. Dan yang terakhir output meliputi desain rangka dan kinematika 2 lengan robot.
PC Input Arduino Driver Motor Servo Stepper Kontroler Pantograf
3.2 Perancangan Perangkat Lunak (Software)
Perangkat yang digunakan untuk mengubah gambar vektor menjadi file g-code adalah
inkscape (software). Secara umum diagram alir dari perangkat lunak (software) inkscape
dapat dilihat pada gambar 3.2 berikut ini.
Gambar 3. 2. Diagram alir secara umum perangkat lunak (software)
Untuk pengolahan file g-code harus menentukan gambar vektor terlebih dahulu yang nantinya akan didesain. Gambar tersebut dimasukkan ke dalam software inkscape untuk diolah menjadi file g-code. Pengolahan tersebut dilakukan dengan cara meng-scan gambar. Tujuan dari inkscape adalah menjadi perangkat grafik yang memiliki standar XML, SVG, dan CSS. Format grafis vektor utama inkscape adalah SVG (Scalable Vector Graphics). Kemudian file g-code tersebut diolah lagi menggunakan software CAMotics untuk membaca nilai g-code nya. Dengan CAMotics dapat melihat jalur pergerakan alat dengan mensimulasi
Selesai Mulai Ambil Gambar Vektor Inkscape CAMotics Mikrokonroller
program g-code 3-axis dan memvisualisasikan hasil kedalam 3D. hasil dari CAMotics di transfer ke mikrokontroller untuk di program nilai g-code nya dikirim ke driver motor sehingga dapat menggerakan motor stepper.
Gambar 3.4 merupakan diagram alir perancangan perangkat lunak pada mikrokontroler.
Gambar 3. 3. Diagram alir pada mikrokontroler
Diagram alir menggambarkan cara kerja program plotter robot drawing yang dibuat. Program diawali dengan inisialisasi. File g-code digunakan untuk mengatur motor stepper supaya dapat menggerakkan lengan robot sesuai desain yang diinginkan. Motor stepper diprogram terlebih dahulu untuk mengendalikan gerakan dengan memberikan pulsa masukan tujuannya untuk kalibrasi posisi motor stepper.
3.3 Pantograf
Pantograf adalah instrumen geometri yang digunakan untuk mereproduksi gambar geometrik yang diberikan atau bidang dari berbagai bentuk, pada skala yang diperbesar atau diperkecil.
Pantograf dapat mengubah ukuran gambar sesuai dengan ukuran yang diinginkan. Pada dasarnya, kerja pantograf berdasarkan jajaran genjang. Tiga dari empat sisi jajaran
Mulai
Inisialisasi
Baca G-code
Gerakan Stepper
genjang a, b dan c mempunyai skala faktor yang sama. Skala pada ketiga sisi tersebut dapat diubah ubah sesuai kebutuhan, yaitu memperbesar atau memperkecil peta.
3.4 Perancangan Perangkat Keras (Hardware)
Secara garis besar perancangan perangkat keras (hardware) terdiri dari perancangan mekanik robot. Yang pertama adalah merancang lengan robot secara matematis. Tujuannya adalah agar pergerakan mekanik lengan robot dapat terukur dengan baik. yang kedua perancangan lengan robot menggunakan perhitungan invers kinematika. Kemudian desain mekanik lengan robot menggunakan motor stepper dan motor servo secara lengkap.
3.4.1 Perancangan Mekanik Robot
Secara garis besar perancangan perangkat keras (hardware) untuk menyusun sebuah sistem pada perancangan mekanik pantograf digerakkan oleh dua buah motor stepper dan satu buah servo untuk mengangkat pen. Desain mekanik lengan robot dapat dilihat pada gambar 3.4. panjang lengan masing-masing adalah 30 cm. Gambar 3.5. dan 3.6. merupakan gambar tampak atas dan tambak bawah.
Bagian-bagian mekanik pada robot drawing: 1. Motor stepper 1 2. Motor stepper 2 3. Lengan 1 4. Lengan 2 5. Lengan 3 6. Lengan 4 7. Pena 8. Motor servo
Gambar 3. 4. Tampilan Keseluruhan Desain 3D Mekanik Pantograf 7 1 2 3 4 5 6 8
Gambar 3. 5. Desain 3D Mekanik Pantograf Tampak Atas
Gambar 3. 6. Desain 3D Mekanik Pantograf Tampak Bawah
Pada gambar 3.7. dan 3.8. merupakan penjelasan rumus yang akan digunakan untuk mengetahui sudut, memperlihatkan sudut β1dan β5 yang merupakan perubahan sudut yang terjadi untuk mencapai koordinat yang dituju:
Gambar 3. 7. Sudut β1
Gambar 3. 8. Sudut β5 Nilai β1 didapat dari 𝛽1 = 𝑡𝑎𝑛−1(𝑦3
−𝑥3)
Nilai β5 dapat dicari dengan menggunakan hukum cosinus yaitu; 𝑐𝑜𝑠𝛼 =𝑏2+𝑐2−𝑎2 2𝑏𝑐 ; jadi 𝑐𝑜𝑠𝛽5 = 𝑃=𝐿352+𝐿452−𝐿342 2×𝐿35×𝐿45 P1 β1 L1 P2 P3 L2 L13 β5 L4 P5 L3 P3 P4 L35
Sehingga β5 dapat dijabarkan sebagai berikut: 𝛽5 = cos−1((𝐿532+𝐿42−𝐿32)
(2∗𝐿53∗𝐿4) )
Berikut merupakan contoh perhitungan desain gambar kotak untuk mengetahui sudut, dengan menggunakan rumus invers kinematika. Nilai x dan y diperoleh dari file g-code :
𝐿13 = √𝑥2 + 𝑦2 = √1,682+ 57,022 𝐿13 = 57,04 𝑐𝑚 𝐿53 = √((𝑥3 + 𝐿5)2+ 𝑦32) = √((1,68 + 10)2+ 57,022) 𝐿53 = 58,20 𝑐𝑚 𝛼1 = (cos−1 (𝐿12+𝐿132−𝐿22) (2∗𝐿1∗𝐿13) ) = (cos−1 (302+57,042−302) (2∗30∗57,04) ) 𝛼1 = 18,07° 𝛽1 = tan−1(𝑦3 −𝑥3) = tan−1(57,04 −1,68) 𝛽1 = −88,31° 𝜃1 = 𝜋 − 𝛼1 − 𝛽1 = 𝜋 − 18,07 − (−88,31) 𝜃1 = 79,3° 𝛼5 = tan−1( 𝑦3 𝑥3+𝐿5) = tan−1( 57,02 1,68+10) 𝛼5 = 60,94° 𝛽5 = cos−1((𝐿532+𝐿42−𝐿32) (2∗𝐿53∗𝐿4) ) = cos−1((58,202+302−302) (2∗11,56∗30) ) 𝛽5 = 14,07° 𝜃5 = 𝛼5 + 𝛽5 = 60,94 + 14,07 𝜃5 = 75,01°
Gambar 3. 9. Tampilan koordinat sumbu axis (X,Y) dan Jarak Daerah Kerja Lengan Robot Pantograf
Pada Gambar 3.9 menunjukkan tampilan sumbu koordinat prototype lengan robot pantograf penggambar dua dimensi untuk melakukan gerakkan rotasi, yaitu rotasi terhadap sumbu x, y. Gambar 3.9 juga menampilkan jarak antara pangkal lengan robot yang diukur dari motor stepper hingga menuju pen holder yaitu sejauh 55 cm. jarak tersebut digunakan untuk menentukan posisi titik referensi sebagai acuan lengan robot untuk menggambar bidang dua dimensi di kertas A3.
29
BAB IV
HASIL DAN PEMBAHASAN
Bab ini menjelaskan tentang hasil keseluruhan sistem pada blok diagram seperti pada bab 3 dan pengamatan dari software pengubah gambar vektor menjadi perintah gerakan robot dalam bentuk g-code. Hasil pengamatan ini akan di bagi menjadi perancangan perangkat keras, perangkat lunak dan hasil pengamatan.
4.1 Perancangan Perangkat Keras
Pada hasil perancangan perangkat keras akan menjelaskan tentang bentuk mekanik sistem lengan robot, komponen elektrik sistem lengan robot dan pengujian gerakkan mekanik lengan robot. Bentuk mekanik meliputi tampilan keseluruhan lengan robot plotter robot drawing. Pada komponen elektrik menunjukkan komponen-komponen pengendali motor.
4.1.1 Bentuk Mekanik Sistem Lengan Robot
Tampilan keseluruhan lengan robot plotter robot drawing ditunjukkan pada gambar 4.1.
Gambar 4. 1. Mekanik Plotter Robot Drawing
Mekanik plotter robot drawing yang terdiri dari base, pantograf, power supply dan area kerja. Media gambar menggunakan kertas ukuran A4. Bagian ruas lengan terbuat dari bahan akrilik bening dengan ketebalan 5 mm dan panjang masing-masing 30cm.
Bagian paling ujung adalah penholder yang digunakan untuk meletakkan bolpoin yang merupakan end effector dari plotter robot drawing. Ukuran lubang pada penholder dapat di atur sesuai dengan ukuran bolpoin yang digunakan.
Pada bagian pengolahan program terdapat driver motor yang berfungsi sebagai pengendali motor stepper dengan masukan dari arduino dan output menggerakkan motor
stepper. Modul driver stepper menggunakan jenis DRV8825 dengan tegangan 8,2V-45V
dan arus mencapai 1,5A. Menggunakan power supply dikarenakan sumber tegangan pada arduino tidak cukup untuk menggerakkan motor stepper. Power supply digunakan untuk memberikan catu daya pada motor stepper dengan tegangan 0-12V dan arus 30A.
Gambar 4. 2. Posisi Motor Stepper
Posisi motor stepper secara mekanik ditampilkan pada gambar 4.2. Motor stepper diletakkan dibawah base untuk menggerakkan link (pantograf) dan pully belt berfungsi untuk meminimalisir pergerakan lengan. Pada penelitian ini menggunakan dua motor stepper
nema17 (17HS4401). Pemilihan motor stepper nema17 dikarenakan ukuran stepper yang
umum digunakan dalam 3D print, cnc dan x,y plotter, selain itu juga motor stepper mampu bergerak sesuai posisi yang diinginkan. Motor stepper akan menggerakkan link (pantograf) terhadap sumbu x,dan sumbu y.
Motor servo secara mekanik dapat dilihat pada gambar 4.3. Motor servo yang diletakkan dibawah lengan bertujuan untuk mengangkat bolpoin. Hal ini bertujuan untuk pergeseran titik atau bergerak terhadap sumbu z. motor servo yang digunakkan pada penelitian ini motor servo Tower Pro MG90S dan sudah disesuaikan dengan ketersediaan di pasaran dan tipe gear metal yang memiliki kemampuan mengangkat lengan robot dan gearboxnya lebih awet sehingga aman digunakkan berulang-ulang.
Stepper 1 Stepper
Gambar 4. 3. Posisi Motor Servo
4.1.2 Komponen Elektrik Sistem Lengan Robot
Rangkaian elektrik sistem pengendali lengann robot ditunjukkan pada gambar 4.2
Gambar 4. 4. Mekanik Plotter Robot Drawing
Rangkaian elektrik sistem pengendali plotter robot drawing terdiri dari: 1. Board arduino mega 2560 (Mikrokontroler)
2. Ramps 1.6 (cnc shields)
3. Driver DRV8825 (Stepper kontroler)
4. Kabel USB (Komunikasi serial mikrokontroler dengan pc) 5. Output port ke motor stepper
6. Output port ke motor servo 7. Terminal port dari power supply
Mikrokontroler arduino mega 2560 melakukan komunikasi serial dengan pc melalui kabel usb. Selain untuk komunikasi serial, kabel usb juga digunakan untuk aktivitas upload dan download program. Ramps 1.6 terhubung dengan board arduino mega 2560 dengan cara
5 1 7 3 2 6 4
stackkabel/kaki-kaki ramps ditancapkan ke port arduino mega 2560, sebagai koneksi untuk output port ke motor stepper dan motor servo. Ramps 1.6 mendapatkan power supply eksternal dengan tegangan 12 volt dan arus 30 ampere untuk menggerakkan motor stepper.
Motor stepper memerlukan stepper kontroler atau driver untuk memberikan daya pada tiap fase dalam waktu atau urutan yang tepat untuk membuat motor berputar. Motor stepper tidak bisa bekerja sesuai fungsinya dengan cara memberikan power supply langsung. Mikrokontroler arduino sebagai sumber pulsa listrik untuk driver, driver bekerja sebagai perangkat yang mengatur short power fase/lilitan dimotor stepper sekaligus sumber listrik dengan volt dan ampere yang cukup untuk motor. Driver yang digunakan adalah driver DRV8825 yang dihubungkan ke pin stepper motor driver pada ramps 1.6. output port yang digunakan pada rangkaian elektrik sistem pengendali lengan robot sebanyak dua port untuk menggerakkan motor stepper dan satu port untuk menggerakkan motor servo.
4.1.3 Pengujian Gerakan Mekanik Lengan Robot
Pengujian gerakan mekanik lengan robot bertujuan untuk mengetahui besarnya sudut pergerakan motor stepper untuk mencapai suatu titik pada koordinat tertentu. Metode yang digunakan dalam pengujian ini adalah membandingkan hasil perhitungan sudut secara matematis dengan hasil gerakan motor stepper. Pengujian gerakan mekanik lengan robot secara matematis menggunakan metode perhitungan invers knimatika yang mengacu pada persamaan (2-1) sampai persamaan (2-8). Pengujian ini dilakukan dengan beberapa titik referensi untuk gambar kotak, segitiga, dan lingkaran. Tabel 4.1 menunjukkan hasil perhitungan inverse kinematics menggunakan metode geometri pada titik referensi kotak, segitiga, dan lingkaran. Nilai titik koordinat dapat dilihat pada lampiran L8,L9, dan L10.
Tabel 4. 1. perhitungan inverse kinematik dengan metode geometri pada titik referensi
Sudut aktual (pengujian) diperoleh dari hasil gerakkan motor stepper pada pantograf dengan melakukan pengukuran besar sudut menggunakan busur derajat. Besar sudut
Titik referensi koordinat
Sudut pergerakan lengan (o) x y z Stepper 1 Stepper 2 Kotak 34,2 39,7 0,1 200 50 Segitiga 25,8 23 0,1 167 77 lingkaran 49,4 17 0,1 134 31
pengujian yang dihasilkan menggunakan busur derajat seperti pada gambar 4.5 dan hasil yang diperoleh ditunjukkan pada tabel 4.2 dan lampiran L1, L2, dan L3.
Gambar 4. 5. Cara Pengukuran Sudut Menggunakan Busur Derajat
Data yang diperoleh dari perhitungan matematis (inverse kinematics) dan hasil pengamatan sudut menggunakan busur derajat dihitung nilai % Errornya untuk
mengetahui besarnya perbedaan yang terjadi. Secara perhitungan dan pengujian nilai %
Error diperoleh dengan cara sebagai berikut:
% 𝐸𝑟𝑟𝑜𝑟 = 𝑠𝑢𝑑𝑢𝑡 𝑝𝑒𝑟ℎ𝑖𝑡𝑢𝑛𝑔𝑎𝑛 − 𝑠𝑢𝑑𝑢𝑡 𝑝𝑒𝑛𝑔𝑢𝑗𝑖𝑎𝑛
𝑠𝑢𝑑𝑢𝑡 𝑝𝑒𝑟ℎ𝑖𝑡𝑢𝑛𝑔𝑎𝑛 × 100%
Tabel 4. 2. Hasil Sudut Pengujian Dan Perhitungan Pada Gambar Bidang 2 Dimensi
Dari hasil pengamatan pada tabel 4.2 dapat dilihat % Error pada pengujian gambar kotak, segitiga, dan lingkaran memiliki % Error yang bervariasi. Hal ini disebabkan karena dalam proses pembuatan gambar yang belum sempurna dan mekanik pada lengan robot yang masih belum presisi dan peletakan busur derajat untuk mengukur sudut aktual pada stepper
Gambar Bidang 2D
Sudut Perhitungan Sudut Pengujian Delta
Stepper 1 Stepper 2 Stepper 1 Stepper 2 Stepper 1 Stepper 2
Kotak 200 50 170 66 30 16
Segitiga 167 77 168 61 1 16
Lingkaran 134 31 160 68 26 37
% Error kotak Segitiga Lingkaran
Stepper 1 15% 0.5% 19,4%
1 dan stepper 2. Dalam perbedaan sudut pengujian dan perhitungan selain kurang kepresisian mekanik disebabkan juga dalam pembulatan sudut pada perhitungan.
4.2 Analisa Dan Pembahasan Perangkat Lunak
Perancangan perangkat lunak terdiri dari pengolahan di dalam processing 3 dan arduino IDE yang berkomunikasi secara serial menggunakan kabel usb. Perintah untuk menggambar dilakukan di software arduino Mega2560 untuk pembacaan g-code yang nantinya perintah-perintah tersebut untuk menggerakkan lengan robot dilakukan di software processing 3. Data serial yang dikirim berupa pulsa-pulsa yang dapat menggerakkan motor
stepper.
4.2.1. Pembahasan Program Pada Software Arduino Mega2560
Pada penelitian dengan sistem lengan robot pantograf penggambar bidang 2 dimensi software Arduino Mega2560 digunakan untuk menulis program, melakukan pembacaan data serial. Dan melakukan pengiriman data berupa pulsa-pulsa digital ke modul ramps 1.6 untuk menggerakkan stepper. Program yang ditulis di arduino Mega2560 selain pembacaan dan pengiriman data.
Gambar 4. 6. Tampilan Software Arduino Mega2560
Sebelum melakukan penulisan program utama untuk menjalankan sistem, seluruh fungsi dan variable yang digunakan dalam proses pengoperasian program harus didefinisikan/ dideklarasikan terlebih dahulu. Pendeklarasian fungsi dan variable pada
sistem lengan robot ini merupakan program inisialisasi. Inisialisasi pada sistem ini adalah inisialisasi library driver motor stepper dan inisialisasi motor servo yang digunakan.
Gambar 4. 7. Program Inisialisasi Motor Stepper Dan Motor Servo
Pada gambar 4.7 merupakan program inisialisasi motor stepper dan motor servo untuk menggerakkan lengan robot pantograf untuk menggambar bidang 2 dimensi. Motor stepper berputar satu putaran penuh sebanyak 200 stepp dengan radius tiap step adalah 1,8° pada titik pusatnya sehingga konfigurasi yang digunakan adalah fullstep.
Pada gambar 4.8 merupakan program perintah g-code G00 untuk menempatkan bolpoin secara cepat dan tidak menurunkan bolpoin ke papan gambar. Semua sumbu bisa bergerak secara simultan sehingga menghasilkan jalur lurus. Selain perintah g-code G00 terdapat perintah lainya seperti G01, perintah gerakan interpolasi lurus dengan menempatkan bolpoin ke permukaan papan gambar dan bergerak lurus dari titik awal menuju titik akhir, dan perintah lainya yaitu G02 dan G03. Dengan mengikuti gerakkan melingkar clock wise dan counter clock wise dari titik awal hingga titik akhir dengan posisi menempatkan bolpoin pada papan gambar. Perintah-perintah diatas merupakan perintah yang biasa digunakan untuk menggambar bidang 2 dimensi.
Gambar 4. 9. Program Skala Untuk Mengatur Ukuran Gambar
Pada gambar 4.9 merupakan program skala untuk mengatur ukuran gambar dalam skala berapa persen. Dalam pengujian lengan robot menggunakan program ini untuk mengatur skala 100% dan 50% untuk diuji angka keberhasilannya.
4.2.2. Pembahasan Pada Software Processing 3
Pada gambar 4.10 yang digunakan untuk memberikan perintah pada sistem lengan robot pantograf penggambar bidang 2 dimensi. Perintah dituliskan dengan bahasa pemrograman cnc (computer numerical control) untuk menggerakkan pantograf. Selain perintah yang dapat dituliskan juga dapat memasukan file berupa g-code yang dapat di eksekusi program untuk menggerakkan pantograf.
Gambar 4. 10. Tampilan Pada Processing 3
Proccessing 3 merupakan perangkat lunak yang fleksibel dan bahasa untuk
mempelajari cara membuat kode dalam konteks seni visual dan literasi visual dalam teknologi [11].
CAMotics digunakan untuk menulis kode cnc dan memvisualisasikan gerakan yang
dihasilkan dari alat dan/atau benda kerja. Kode tersebut berisikan file g-code yang nantinya digunakan sebagai data untuk pengolahan di mikrokontroler sehingga dapat menggerakkan motor stepper.
Gambar 4. 11. Tampilan simulasi CAMotics
Gambar 4.11 merupakan hasil dari simulasi CAMotics yang berisikan instruksi g-code. Nilai x,y sebagai data input untuk menentukan posisi titik koordinat.
Gambar 4. 12. Instruksi G-code
4.3 Analisa Hasil Pengujian Gambar Bidang Dua Dimensi
Pada pengujian gambar bidang dua dimensi akan menjelaskan tentang hasil dari pengamatan berupa pengujian kesesuaian gambar antara gambar bidang 2D aktual (yang digambar lengan pantograf pada papan gambar) dengan gambar 2D yang dibuat atau diambil dari PC untuk kesesuaiannya. Pada pengujian gambar bidang 2D disini membuat gambar dengan menggunakan software paint berikut gambar software paint yang
digunakan pada penelitian pada gambar 4.4.
Secara keseluruhan penelitian lengan robot pantograf penggambar bidang 2 dimensi ini belum dapat membentuk garis yang benar-benar lurus . Hal tersebut terjadi karena kurang kepresisian dalam pembuatan mekanik. dalam
4.3.1 Analisa Hasil Gambar Kotak
Hasil gambar kotak yang dilakukan sistem lengan robot ini sudah sesuai dengan perancangannya namun belum dapat dikatakan sempurna. Cara menggambar dengan lengan robot sudah seperti pada perancangan yaitu menggambar titik-titik yang mendekati bidang kotak, namun tidak bisa membuat garis yang benar-benar lurus membentuk kotak dan bagian ujung belum bisa saling berpotongan. Sehingga algoritma yang digunakan dalam membuat garis lurus pada bidang datar pada lengan robot masih perlu disempurnakan.
Referensi gambar yang sudah digambar oleh lengan robot selanjutnya diukur menggunakan penggaris sehingga didapatkan ukuran sisi-sisi kotak kemudian dibandingkan dengan parameter ukuran yang ditentukan menggunakan inkscape seperti yang ditunjukkan pada gambar 4.15.
Gambar 4.14 merupakan hasil pengujian gambar kotak dengan perbandingan drawing scale 50% dan 100%. Pengubahan scale tidak berpengaruh pada keluaran gambar (bentuk gambar sama).
Gambar 4. 14. Hasil Pengujian Gambar Kotak
Parameter ukuran dimensi pada bidang kotak adalah nilai dari sisi. Tabel 4.3 Merupakan sisi yang ditentukan pada sistem lengan robot pantograf untuk melakukan analisa berdasarkan parameter dimensi pada gambar kotak. Bidang yang dapat digambar lengan
robot ukurannya diukur menggunakan inkscape. Hasil gambar kotak aktual diperoleh berdasarkan keempat sisi yang berhasil digambar lengan robot.
Gambar 4. 15. Hasil Pengujian Gambar Kotak
Tabel 4. 3. Pengujian Gambar Kotak
Scale % Input Aktual Delta %error S1 (cm) S2 (cm) S3 (cm) S4 (cm) Rata-rata S1 (cm) S2 (cm) S3 (cm) S4 (cm) Rata-rata 100 4,7 4,6 4,7 4,6 4,65 5,5 4,8 5,5 4,8 5,15 0,5 10,75% 50 2,35 2,3 2,35 2,3 2,325 2,8 2,1 2,8 2,4 2,525 0,2 8,6%
Berdasarkan tabel 4.3 dapat dilihat bahwa hasil dari gambar aktual dan input nilainya bervariasi sehingga untuk mengetahui kepresisiannya perlu membuat nilai rata-rata dari sisi aktual dan input gambar kotak kemudian dapat dihitung nilai error nya. Gambar kotak dengan scale 100% memiliki nilai error yang besar dibandingkan dengan gambar kotak dengan scale 50% yaitu 10,75%. Terjadinnya nilai error pada sistem lengan robot terjadi karena kurangnya kepresisian dalam pembuatan mekanik pantograf. Berdasarkan hasil pengamatan pada gambar kotak bahwa sistem lengan robot mampu menggambarkan gambar 2D dengan bervariasi ukuran dengan cara mengubah scale pada open processing 3, sehingga tidak menyulitkan untuk menggambar lagi dengan ukuran yang berbeda.
4.3.2 Analisa Hasil Gambar Segitiga
Hasil gambar segitiga yang dilakukan sistem lengan robot ini sudah sesuai dengan perancangannya namun belum dapat dikatakan sempurna. Cara menggambar dengan lengan robot sudah seperti pada perancangan yaitu menggambar titik-titik yang mendekati bidang segitiga, namun tidak bisa membuat garis yang benar-benar lurus dan miring membentuk
S2=4,6 cm
S3=4,7 cm S4=4,6 cm
segitiga dan bagian ujung belum bisa saling berpotongan. Sehingga algoritma yang digunakan dalam membuat garis lurus pada bidang datar pada lengan robot masih perlu disempurnakan.
Referensi gambar yang sudah digambar oleh lengan robot selanjutnya diukur menggunakan penggaris sehingga didapatkan ukuran sisi-sisi segitiga kemudian dibandingkan dengan parameter ukuran yang ditentukan menggunakan inkscape seperti yang ditunjukkan pada gambar 4.17.
Gambar 4. 16. Hasil Pengujian Gambar segitiga
Gambar 4.16 merupakan hasil pengujian gambar kotak dengan perbandingan drawing scale 50% dan 100%. Pengubahan scale tidak berpengaruh pada keluaran gambar (bentuk gambar sama).
Gambar 4. 17. Hasil Pengujian Gambar Segitiga
Parameter ukuran dimensi pada bidang segitiga adalah nilai dari sisi-sisi segitiga. Tabel 4.4. merupakan sisi yang ditentukan pada sistem lengan robot pantograf untuk
S1= 4,4cm
S3= 5,1cm
![Gambar 2. 1. Arduino Mega 2560 [3]](https://thumb-ap.123doks.com/thumbv2/123dok/4326174.3166960/15.892.236.659.411.851/gambar-arduino-mega.webp)