PROPOSAL
PENELITIAN PASCASARJANA DANA ITS TAHUN 2020
DESAIN ALGORITMA ESTIMASI KALMAN FILTER PADA SISTEM SWITCHING
(STUDI KASUS : SISTEM LIQUID LEVEL CONTROL)
Tim Peneliti:
Prof. Dr. Erna Apriliani, M.Si (Matematika/FSAD/ITS) Dr. Didik Khusnul Arif, S.Si, M.Si (Matematika/FSAD/ITS)
Dr. Dieky Adzkiya, S.Si, M.Si (Matematika/FSAD/ITS)
DIREKTORAT PENELITIAN DAN PENGABDIAN KEPADA MASYARAKAT
INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA
DAFTAR ISI
HALAMAN JUDUL i
DAFTAR ISI ii
BAB I RINGKASAN iii
BAB II LATAR BELAKANG 1
2.1 Perumusan Masalah . . . 3
2.2 Tujuan Penelitian . . . 4
2.3 Relevansi . . . 4
2.4 Target Luaran . . . 5
BAB III TINJAUAN PUSTAKA 6 3.1 Teori Penunjang . . . 6
3.1.1 Klasifikasi sistem hibrid . . . 6
3.1.2 Sistem switching . . . 7
3.1.3 Metode Kalman filter . . . 10
3.1.4 Algoritma estimasi pada sistem switching . . . 11
3.1.5 Sistem liquid level control . . . 11
3.2 Studi Hasil Penelitian Sebelumnya (State of the Art ) . . . 14
BAB IV METODE 17 4.1 Tahapan Penelitian . . . 17
4.2 Diagram Alur Metode Penelitian . . . 18
BAB V JADWAL DAN RANCANGAN ANGGARAN BIAYA 20 5.1 Jadwal . . . 20
5.2 Anggaran Biaya . . . 20
DAFTAR PUSTAKA 23
BAB I
RINGKASAN
Sistem hibrid adalah sistem dinamis yang menunjukkan perilaku dinamis kontinu dan diskrit. Penggabungan antra dinamika tersebut memiliki manfaat yaitu fleksibilitas dalam memodelkan fenomena dinamis sehingga model yang didapatkan mndekati fenomena yang ada.
Sistem yang diaktifkan (switching) dapat dipandang sebagai abstraksi sistem hibrid tingkat tinggi (higher-level ), yang diperoleh dengan mengabaikan detail perilaku diskrit. Secara informal, sistem switching terdiri dari beberapa subsistem dinamik (linier atau nonlinier) dan peraturan perpindahan antara subsistem yang disebut hukum switching. Sinyal switching salah satu repre-sentasi dari hukum switching yang berguna dalam menentukan subsistem mana yang aktif dan tidak aktif dalam satu waktu.
Selanjutnya, apabila sinyal switching tidak dapat diukur dan tidak diketahui informasinya, maka metode asimilasi data sangat dibutuhkan pada kondisi ini dan masalah estimasi sinyal switching dan state menjadi lebih sulit. Kalman filter adalah metode asimilasi data yang memperhatikan unsur stokastik di dalam model dan pengukuran.
Desain algoritma estimasi Kalman filter pada sistem switching akan sangat memudahkan dalam pengaturan konfigurasi antar subsistem. Algoritma ini bertujuan untuk mengestimasi sinyal switching yang merupakan sinyal penentu subsistem mana yang aktif. Ketika subsistem yang aktif telah diketahui, maka dapat dilakukan estimasi state.
Sistem liquid level control adalah salah satu sistem otomasi yang banyak digunakan dalam dunia industri. Sistem liquid level control merupakan sebuah sistem yang menjamin kontinuitas persediaan cairan dalam sebuah tangki yang digunakan untuk proses industri. Sistem liquid level control memiliki
konfu-garasi sedemikian hingga sistem liquid level control merupakan jenis sistem switching yang memiliki unsur stokastik noise pada model dan pengukurannya. Untuk menunjukkan bahwa algoritma dapat bekerja dengan baik, dilakukan simulasi dan perhitungan error terhadap estimasi sinyal switching dan state pada sistem liquid level control. Diberikan nilai awal yang merupakan nilai ”tebakan”, maka nilai error diharapkan memiliki sifat stabil asimtotik sehingga dapat ditarik kesimpulan bahwa nilai estimasi sangat dekat dengan nilai realnya.
Target luaran yang diharapkan dari penelitian ini adalah publikasi pada jurnal internasional International Journal of Control, Automation and Systems.
Kata Kunci : Sistem switching, Estimasi, Kalman filter, Liquid level control
BAB II
LATAR BELAKANG
Selama dua dekade terakhir ”hibrid” telah menjadi topik utama yang di bahas oleh komunitas kontrol dan ilmu komputer sebagaimana dibuktikan oleh berbagai lokakarya dan jurnal ilmiah. Istilah hibrid dapat digunakan untuk menunjukkan campuran dari dua hal yang berbeda, tidak heran istilah itu telah digunakan dalam konteks yang beragam (Tabuada, 2009). Sistem hibrid adalah sistem dinamis yang menunjukkan perilaku dinamis kontinu dan diskrit (Liberzon, 2003). Penggabungan antra dinamika tersebut memiliki manfaat yaitu fleksibilitas dalam memodelkan fenomena dinamis sehingga model yang didapatkan mndekati fenomena yang ada.
Sistem yang diaktifkan (switching) dapat dipandang sebagai abstraksi sistem hibrid tingkat tinggi (higher-level ), yang diperoleh dengan mengabaikan detail perilaku diskrit. Secara informal, sistem switching terdiri dari beberapa subsistem dinamik (linier atau nonlinier) dan peraturan perpindahan antara subsistem yang disebut hukum switching. Sinyal switching salah satu repre-sentasi dari hukum switching yang berguna dalam menentukan subsistem mana yang aktif dan tidak aktif dalam satu waktu. Kejadian pergantian pada sistem switching dapat diklasifikasikan ke dalam state-dependent (bergantung state) dan time-dependent (bergantung waktu) (Liberzon, 2003).
Masalah kontrol dan estimasi untuk sistem switching telah menarik banyak perhatian selama dekade terakhir (Ping, Lee & Shim, 2016). Kalman Filter adalah suatu metode yang digunakan untuk melakukan estimasi suatu nilai (Apriliani, 2013). Filter ini dinamai berdasarkan nama salah satu pengembang utama teorinya, Rudolf E. Kalman pada sekitaran tahun 1960. Kalman Filter atau Linear Least Mean Squares Estimator ini digunakan untuk meminimumkan error estimasi mean squared pada liniear stokastik
menggu-nakan noisy linear sensors. Selain itu, metode ini juga sering disebut Linear Quadratic Estimator (LQE) karena meminimumkan fungsi kuadratik dari error estimasi pada sebuah sistem dinamis linier dengan white measurement dan disturbance noise (Grewal & Andrews, 2001).
Di satu sisi, masalah stabilisasi dan pelacakan dari sistem switching telah dibahas, misalnya, dalam (Zhao, Yin, Li & Niu, 2015) dan (Li & Wang, 2016). Berbagai kajian mengenai keteramatan dan metode desain pengamat pada sistem switching ,khususnya, ketika sinyal switching diketahui atau dapat diukur telahdibahas dari berbagai sudut pandang pada (Guangming Xie & Wang, 2004) dan (Medina & Lawrence, 2008).
Selain itu, desain pengamat yang memiliki sifat asimptotik telah dibangun untuk kelas sistem switching yang cukup umum. Sebagai contoh, desain pengamat yang diusulkan oleh (Tanwani, Shim & Liberzon, 2013) dapat memperkirakan keadaan bahkan ketika sistem beralih ke subsistem yang tidak dapat diamati selama keteramatan akumulatif tertentu berlaku untuk jangka waktu tertentu. Dengan informasi mengenai sinyal switching, ketera-matan dan desain pengamat telah diperluas ke kasus nonlinear oleh (Shim & Tanwani, 2014).
Selanjutnya, apabila sinyal switching tidak dapat diukur dan tidak diketahui informasinya, masalah estimasi sinyal switching dan state menjadi lebih sulit (Ping dkk., 2016). Pada (Tian, Floquet, Belkoura & Perru-quetti, 2010) dan (Mincarelli, Floquet & Belkoura, 2011) telah mengestimasi sinyal switching melalui teori distribusi, tetapi informasi state diasumsikan diketahui. Pada (Fliess, Join & Perruquetti, 2009), telah di bangun algoritma estimasi untuk sinyal switching dan state, tetapi hasil penelitian tersebut terbatas pada Single Input-Single Output (SISO). Pada (Ping dkk., 2016), telah dibangun pengamat tipe hibrid untuk mengestimasi sinyal switching dan state untuk sistem switching linier waktu kontinu.
Metode asimilasi data sangat dibutuhkan pada masalah estimasi sinyal switching dan state. Kalman filter adalah metode asimilasi data yang
memperhatikan unsur stokastik di dalam model dan pengukuran (Welch & Bishop, 2006). Desain algoritma estimasi Kalman filter pada sistem switching akan sangat memudahkan dalam pengaturan konfigurasi antar subsistem.
Dalam penelitian ini, akan dikonstruksi sebuah algoritma estimasi Kalman firter pada sistem switching yang kejadian pergantiannya berdasarkan oleh waktu. Langkah pertama adalah akan di estimasi terlebih dahulu sinyal switching sehingga dari sinyal switching tersebut dapat diektahu subsistem mana yang aktif, kemudian dari akan di cari estimasi state dari subsistem yang aktif tersebut.
Dalam sebuah industri penggunaan tangki banyak digunakan untuk memenuhi kebutuhan proses produksi. Tangki tidak hanya digunakan sebagai media penyimpanan tetapi juga digunakan untuk menjaga kelancaran keterse-diaan cairan yang diperlukan selama proses produksi berlangsung.
Pentingnya penggunaan tangki tersebut mengharuskan tangki berada pada ketinggian normal agar proses produksi tidak terganggu. Hal tersebut menimbulkan permasalahan yaitu pekerja harus memonitor ketinggian cairan secara terus menerus, tentu saja dalam proses monitoring yang dilakukan berulangkali menghabiskan banyak waktu dan membutuhkan tenaga ekstra pekerja. Untuk mengatasi permasalahan tersebut, dibutuhkan sebuah teknologi pengendali jarak jauh yang dapat memudahkan pekerja dalam proses monitoring dan mengontrol sistem secara real time.
Sistem liquid level control memiliki konfugarasi sedemikian hingga sistem liquid level control merupakan jenis sistem switching. Keberhasilan estimasi akan di tentukan dari nilai error estimasi bersifat stabil asimtotik sehingga dapat ditarik kesimpulan bahwa nilai estimasi sangat dekat dengan nilai realnya.
2.1 Perumusan Masalah
Berdasarkan uraian di atas, permasalahan yang diselesaikan dalam penelitian ini adalah:
switching
2. Bagaimana implementasi algoritma estimasi Kalman filter pada sistem liquid level control.
2.2 Tujuan Penelitian
Tujuan penelitian ini adalah mengembangkan sebuah metode estimasi sehingga dapat diimplementasikan pada sistem switching linier. Metode ini mampu mengestimasi sinyal switching sekaligus state pada masing-masing subsistem yang aktif pada satu waktu tertentu.
Tujuan khusus lainnya adalah membangun sebuah perangkat estimator pada sistem dengan pergantian. Perangkat lunak tersebut dapat dipergunakan oleh praktisi untuk menentukan waktu dan nilai yang tepat saat sistem bekerja sehingga memudahkan dalam pengontrolan.
2.3 Relevansi
Kontribusi yang dapat diberikan melalui penelitian ini memiliki dua sasaran yaitu sasaran keilmuan dan sasaran aplikasi. Secara keilmuan penelitian ini akan memberikan sumbangan baru bagi ilmu pengetahuan, terutama dalam bidang kontrol dan ilmu komputer.
Kontribusi aplikasi penelitian ini adalah mengembangkan metode estimasi untuk sistem switching. Alasan penggunaan estimasi Kalman filter adalah karena metode ini cocok untuk mengestimasi sistem linier dengan noise yang berdistribusi (stokastik) hal tersebut cocok dengan fenomena real yang ada yaitu bahwa sistem yang berda di alam bersifat stokastik dan dapat berupa sistem switching.
Secara khusus, hasil penelitian ini memberikan kontribusi yang cukup besar bagi orang-orang yang bekerja di sistem kontrol. Mereka dapat menggu-nakan perangkat lunak yang akan dikembangkan untuk mengestimasi waktu pergantian dan besar nilai state dengan lebih mudah.
2.4 Target Luaran
Hasil utama yang ditargetkan pada penelitian ini adalah sebuah metode metode estimasi untuk sistem switching. Metode yang dikembangkan merupakan inovasi baru karena metode ini khusus untuk sistem dengan pergantian (switching). Ini artinya, hasil yang diperoleh dijamin kebenarannya karena dapat dibuktikan secara matematis.
Target luaran yang diharapkan dari penelitian ini adalah publikasi pada jurnal internasional International Journal of Control, Automation and Systems dan seminar internasional International Conference on Mathematics: Pure, Applied and Computation 2020 (ICoMPAC 2020) yang prosidingnya terindeks Scopus.
BAB III
TINJAUAN PUSTAKA
Pada bab ini akan dibahas teori-teori yang digunakan dan studi hasil penelitian sebelumnya (state of the art ).
3.1 Teori Penunjang
Subbab ini membahas beberapa hal yang terkait dengan penelitian ini, misalnya sistem swtching, metode Kalman filter dan sistem liquid level control. 3.1.1 Klasifikasi sistem hibrid
Sistem yang memiliki interaksi antara sistem kontinu dan diskrit biasa dikenal dengan sistem hibrid, dengan bagian kontinu dan diskrit didefiniskan secara detail.
Bidang sistem hibrid memiliki interdisiplin ilmu yang kuat, beberapa komunitas (peneliti) telah mengembangkan dengan sudut pandang yang berbeda. Salah satu pendekatan yang dilakukan oleh peneliti bidang ilmu komputer adalah mempelajari perilaku diskrit pada sistem, meskipun dinamika kontinu relatif memiliki bentuk yang lebih sederhana. Masalah yang mendasari penelitian ini meliputi well-posedness, simulasi, dan verifikasi.
Sebaliknya, banyak peneliti di bidang kontrol lebih memandang sebuah sistem hibrid sebagai sistem yang kontinu dengan kejadian pergantian (switching) dan menempatkan penekanan yang lebih besar pada perilaku state yang kontinu.
Sistem kontinu dengan pergantian diskrit disebut dengan sistem switching. Bagian kontinu pada sistem switching lebih detail daripada bagian diskritnya. Hal tersebut terjadi karena pada bagian diskrit sistem switching dianggap semua kemungkinan dapat terjadi. Hal ini memiliki perbedaan yang cukup signifikan dari sistem hibrid, khusunya pada tahap analisis
(Hespanha, 2005). 3.1.2 Sistem switching
Pergantian pada sistem switching dapat diklasifikasikan ke dalam state-dependent (bergantung state) dan time-dependent (bergantung waktu) (Liberzon, 2003).
Pergantian bergantung state
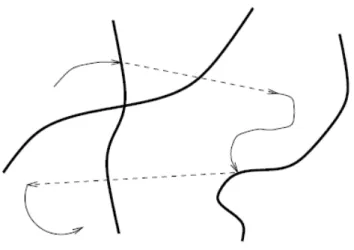
Misalkan terdapat state kontinu dengan Rn dipartisi ke dalam daerah operasi yang berhingga ataupun tak berhingga yang disebut dengan switching surfaces. Pada setiap daerah (subsistem), sistem dinamik yang kontinu yang diberikan oleh persamaan diferensial, dengan atau tanpa kontrol telah diberikan. Apabila trayektori pada subsistem menabrak switching surfaces, maka state kontinu meloncat secara langsung ke nilai yang baru yang dapat diilustrasikan pada Gambar 3.1.
Gambar 3.1: Pergantian bergantung state
Pada Gambar 3.1, kurva yang tebal menyatakan switching surfaces, kurva yang tipis dengan arah panah menyatakan bagian kontinu dari trayektori, dan garis putus-putus diartikan sebagai lompatan. Lompatan yang secara tiba-tiba dari state kontinu biasanya disebut sebagai impulse effect.
Ketika tidak terjadi impulse effect maka trayektori state adalah kontinu dimana saja, meskipun hal tersebut secara umum tidak terdeferensiasi ketika
state trayektori melewati switching surfaces. Pergantian bergantung waktu
Misalkan diberikan fp, p ∈ P yang merupakan fungsi dari Rn ke Rn, dimana P adalah beberapa himpunan indeks (Secara khusus, P adalah sebah subset dari ruang vektor linier yang finite-dimensional ). Kelompok dari sistem tersebut dapat dituliskan sebagai berikut:
˙x = fp(x) p ∈ p ∈ P (3.1)
berevolusi pada Rn.
Fungsi fp diasumsikan memenuhi syarat cukup yaitu Lipschitz lokal. Kasus yang paling mudah untuk dibahas yaitu ketika semua sistem adalah linier(Hespanha, 2005).
fp(x) = Apx, Ap ∈ Rn×n, p ∈ P (3.2)
dan himpunan indeks P adalah berhingga: P = {1, 2, ..., m}.
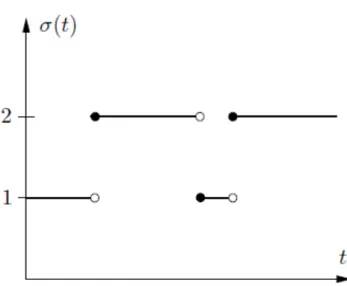
Untuk mendefinisikan sistem switching dengan peragntian bergantung waktu yang dibangun oleh himpunan di atas, diberikan notasi dari sinyal switching yang berupa fungsi sepotong-potong konstan σ : [0, ∞) → P. Fungsi σ memiliki bilangan diskontinu yang berhingga, yang disebut dengan waktu switching pada setiap waktu interval yang dibatasi dan mengambil sebuah nilai konstan pada setiap interval diantara dua waktu yang bergantian secara berurutan.
Peran dari σ adalah untuk menspesifikasikan pada masing-masing waktu t, indeks σ(t) ∈ P dari kelompok sistem (3.1) yang sedang aktif. Diasumsikan bahwa σ adalah kontinu dari kanan disemua titik: σ(t) = limτ −→t+σ(τ ) untuk setiap τ ≥ 0. Sebuah contoh dari sinyal switching pada kasus P = {1, 2} digambarkan pada Gambar 3.2.
Gambar 3.2: Sinyal switching
Pergantian sistem dengan pergantian bergantung waktu dideskripsikan oleh persamaan berikut.
˙x = fσ(t)(x(t))
Pada kasus tertentu pergantian sistem switching linier dapat di tuliskan sebagai berikut.
˙x(t) = Aσ(t)x(t)
Berdasarkan pada Persamaan (3.2), semua subsistem adalah linier. Untuk penyederhanaan notasi, argumen waktu akan sering dihilangkan dan ditulis masing-masing
˙x = fσ(x) (3.3)
dan
˙x = Aσ(x) (3.4)
Dapat dicatat bahwa sulit untuk dibuat perbedaan secara formal antara pergantian bergantung waktu dan pergantian bergantung state. Jika elemen
dari himpunan indeks P dari Persamaan (3.1) adalah korespondensi satu-satu dengan daerah operasi yang didiskusikan pada bagian sebelumnya, dan jika sistem pada daerah tersebut muncul pada Persamaan (3.1), yang selanjutnya setiap trayektori yang mungkin dari sistem dengan pergantian bergantung state juga merupakan solusi dari sistem dengan pergantian bergantung waktu yang diberikan oleh Persamaan (3.3) untuk sinyal switching yang cocok yang telah didefinisikan (tetapi tidak berlaku kebalikan).
3.1.3 Metode Kalman filter
Kalman Filter adalah suatu metode yang digunakan untuk melakukan estimasi suatu nilai. Kalman Filter atau Linier Least Mean Squares Estimator (LLSME) ini digunakan untuk meminimumkan error estimasi mean squared pada liniear stokastik menggunakan noisy linear sensors. Metodek Kalman filter berguna untuk sistem waktu diskrit, sehinggauntuk sistem kontinu perlu dilakukan pendiskritan terlebih dahulu.
Dalam menurunkan persamaan Kalman Filter, dimulai dengan menemukan sebuah persamaan yang menghitung estimasi posteriori ˆxksebagai kombinasi linier dari estimasi priori dan perbedaan antara pengukuran aktual dan prediksi ˆHk− yang ditunjukan pada persamaan berikut (Welch & Bishop, 2006):
ˆ
xk = ˆx−k + K(zk− H ˆx−k) (3.5) (zk − H ˆx−k) pada Persamaan (3.5) disebut pengukuran inovasi, atau residual. Residu mencerminkan ketidaksesuaian antara pengukuran yang diprediksi H ˆx−k dengan pengukuran sebenarnya zk. Jika residualnya nol artinya keduanya ada dalam nilai yang sama. Matriks Knxm pada Persamaan (3.5) dipilih sebagai Gain atau pencampuran faktor yang meminimalkan persamaan kovarians error posteriori.
Kk = Pk−H T(HP− k H T + R)−1 = P − k H T HPk−HT + R (3.6)
dengan melihat Persamaan (3.6) terlihat bahwa pengukuran kovarians error R mendekati nol, gain memiliki bobot residual lebih besar. Secara spesifik
lim
Rk→0Kk = H −
1 (3.7)
Disisi lain, estimasi priori kovarians error Pk− mendekati nol, gain memiliki bobot residual lebih besar. Secara spesifik
lim Pk−→0
Kk= 0 (3.8)
Cara lain untuk memberi bobot pada K adalah bahwapengukuran kovarians error R mendekati nol, pengukuruan aktual zk dapat ”dipercayai” lebih lagi, sementara pengukuran prediksi H ˆx−k semakin tidak dipercayai. Disisi lain sebagai estimasi priori kovarians error Pk− yang mendekati nol, pengukuran aktual zk tidak dipercayai lagi, sementara pengukuran prediksi H ˆx−k semakin lebih dipercayai.
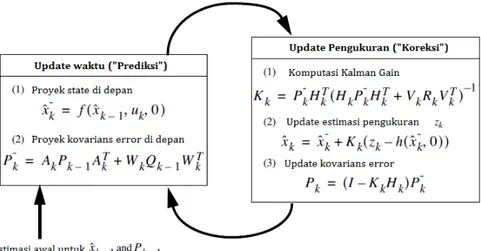
Filter Kalman mengestimasi sebuah proses dengan menggunakan suatu bentuk kontrol umpan balik. Filternya memperkirakan proses state pada suatu waktu kemudian memperoleh umpan balik dalam form pengukuran noisenya. Pengoperasian Kalman Filter akan secara lebih lengkap dijelaskan melalui Gambar 3.3.
3.1.4 Algoritma estimasi pada sistem switching
Peran dari Algoritma Estimasi adalah untuk menentukan mode aktif secara tepat dan memperkirakan nilai state berdasarkan asumsi bahwa tidak ada pergantian saat Algoritma Estimasi berjalan.
Algoritma Estimasi ini dapat digunakan untuk memperkirakan mode aktif pada subsistem secara akurat dengan mengadopsi Algoritma Kalman Filter pada (Welch & Bishop, 2006).
3.1.5 Sistem liquid level control
Tangki penampungan cairan atau sering disebut toren atau tandon (storage tank ) sangat umum dipakai di industri. Fungsinya cukup vital yaitu
Gambar 3.3: Gambar lengkap pengoperasian Kalman Filter (Welch G. & Bishop G, 2001)
sebagai cadangan cairan yang siap digunakan untuk kebutuhan proses industri, sehingga tangki harus dalam ketinggian (level) normal.
Umumnya pengisian cairan dalam tangki dikontrol secara otomatis oleh suatu mekanisme pengaturan yang akan mengisi cairan bila volume cairan tinggal sedikit dan menghentikannya bila sudah penuh.
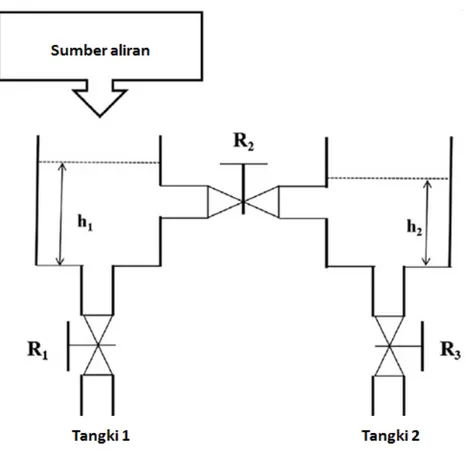
Rangkaian sistem liquid level control dapat disebut sebagai sistem switching karena konfigurasi antar tangki yang saling berhubungan (Mahmoudi, Momeni, Aghdam & Gohari, 2008). Sistem liquid level control yang digunakan pada penelitian ini digambarkan pada Gambar 3.4.
Diasumsikan bahwa sistem terdiri dari dua tangki, satu sumber aliran, dua pipa outlet, dan satu pipa penghubung.
Pipa-pipa berisi katup yang dapat dibuka atau ditutup oleh pengontrol eksternal. Meski ada delapan mode berdasarkan status masing-masing katup (dibuka atau ditutup), hanya tiga konfigurasi katup berikut yang dipertim-bangkan yaitu:
Subsistem 1 : R2 hidup, R1 dan R3 mati Subsistem 2 : R1 dan R2 hidup, R3 mati
Gambar 3.4: Sistem dua tangki (Mahmoudi, Momeni, Aghdam & Gohari, 2008)
Subsistem 3 : R2 dan R3 hidup, R1 mati
Diasumsikan bahwa aliran melalui katup adalah laminar (Laminer adalah aliran fluida yang ditunjukkan dengan gerak partikel-partikel fluidanya sejajar dan garis-garis arusnya halus), yang menyiratkan bahwa hubungan antara laju aliran dalam katup dan ketinggian cairan adalah linier (Mahmoudi dkk., 2008). Bergantung pada nilai kapasitas tangki CT dan hambatan pipa R dalam setiap mode, perilaku sistem dua tangki diatur oleh representasi state-space berikut:
˙x = 3 P i=1 σi(Aix + Biu) + Gw y = 3 P i=1 σi(Cix) + vw (3.9) dengan x =h hT 1 hT2 i
tangki,Gwdan vwmasing-masing adalah noise model (proses) dan pengukuran. Diberikan u = 2e−0,5t(1 + sin3πt) adalah input sumber aliran ke tangki 1. 3.2 Studi Hasil Penelitian Sebelumnya (State of the Art )
Studi hasil penelitian sebelumnya dibagi dapat digambarkan pada peta State of the Art pada Gambar 3.2.
• Liberzon (Liberzon & Morse, 2001) membahas permasalahan perkem-bangan dalam tiga masalah dasar terkait stabilitas dan desain sistem switching. Masalah tersebut meliputi stabilitas untuk urutan pergantian yang sebarang, stabilitas untuk kelas-kelas dari sistem switching, dan konstruksi urutan pergantian yang stabil. Selain itu, dalam makalah ini juga dibahas masalah-masalah yang berhubungan dengan teori dan aplikasi kontrol.
• Domlan dkk (Domlan, Ragot & Maquin, 2007) telah membahas masalah penentuan mode aktif setiap saat, dengan hanya menggunakan data input / output sistem. Kondisi yang menjamin ketunggalan mode aktif yang ditentukan juga diberikan. Dalam makalah ini diasumsikan bahwa tidak ada informasi tentang mekanisme pergantian.
• Fliess dkk (Fliess, Join & Perruquetti, 2008) telah membahas distin-guishability (pembeda) pada sistem switching. Syarat perlu dan cukup diperoleh dan mudah diselidiki, ”input buruk” harus dihindari agar subsistem dapat dibedakan dari seluruh sistem switching linier. Metode yang diusulkan dapat diimplementasikan secara real time setelah periode sampling cukup kecil sehubungan dengan durasi waktu antara dua pergantian berurutan. Selanjutnya, dilakukan estimasi indeks dan state pada subsistem aktif dengan metode estimasi yang robust.
• Ping dkk (Ping dkk., 2016) telah mendesain pengamat jenis hibrid untuk mendeteksi waktu pergantian dan mengestimasi mode aktif dan state sistem switching linear waktu kontinu. Sistem yang dipertim-bangkan memiliki input eksternal dan dipengaruhi oleh gangguan yang
Jo se Rog ot, 2 004 “P aram eter Estim ation of SS ” Ang elo A, 2005 “Re ced ing – Hoqiz on Estim ation fo r sw itching Discre te – Tim e Linear sy stem ” Tian, 20 09 “Sw itc hing tim e estim ation for lin ea r switch ed sy stem : an alg ebra ic a ppro ach ” Elena P ediv ilov a, 2016 “Se t – Valued estim ation o f sw itc hed lin ear sy stem : an app lication to a n au tom otiv e th rottle v alv e” Mig uel He rnan d, 2017 , Sta te es tim ation fo r sto chas tic po ly nom ial s y stem s with switc hing in the state equa tion Sim one Baldia, 2018 , “Rea chable s et estim ation for switched line ar sy stem s with dwe ll tim e switch ing ” Kha led L aboud i, 20 19, “Fa ult and switc hing in sta nts Estim ation fo r switc hed lin ea r s y stem s” Estim asi Pada Switch ing Sy stem s EA, Dom la, 2007, “Activ e Mode Estim ation fo r sw itching sy stem s” Assia Hak em , 2016, “Switc hing tim e estim ation a nd a ctiv e m ode recog nitio n using a da ta p ro jec tio n m ethod ” Yantao Ch en, 201 9, “F inite -Tim e state est im ation a nd a ctiv e m ode iden tification for unce rtain switc hed lin ear sy stem s” Switch ing tim e estim ation and ac tiv e m ode Switch ing Observ er Stef an Pe tters on, 200 6, “De sig n switc hed o bse rv ers f or switched sy stem using m ultip le ly apun ov functions and Dwell tim e switching ” Sebas tia n, 2012 ,” Ev ent -Based State Estim ation with sw itc hing s tatic g ain observ er s” Dav id com es, 2019, “On th e observ ab ility & obse rv er de sig n in switc hed lin ea r sy stem s” Kenz a Te lb isi, 2019, “Activ ator Fau lt es t bas ed on pr opor tiona l – integ ral ob serv er for p lay ed co ntinuou s tim e switc hed sy stem ” Dong seng D U, 2019, “Robust Fa ult estim ation ob se rv er des ig n for switched sy stem s with unk nown in p ut ” Estim asi Estim asi V aria bel K alm an, 1960 Estim asi p d s ist em st ok ast ik K w ak ernak , 1972 Estim asi p ada sis tem dete rm inis tic & stok ast ik Lew is, 19 86 – 92 , A lg oritm a K F terd ir i d ar i 4 t ahap Estim asi Param eter JV A rnold , 1977 “Param ete r est im ation in eng i-neer ing & scie nce” L L jung , 1979 “A sym totic behav ior of the exte n ded K F a s a param ete r est im ator f or lin ear sy stem s Wei w u, 2003 “A SK F M ode l fo r t he m otor cor tic al coding of h and m otion” K ev in P.Murp hy , 1998 Sw itch ing K alm an Fil ter (SK F )” Wei w u, 2004 “Mode ll ing & D ecoding Mo tor cort ic al A ctiv ity U sing a SK F ” V eer arag h A v an, 2006 “S K F -Based A pproac h fo r Track ing and ev ent D etec tio n a t Traf fi c I nterse ct ion Mans a A k hbari, 2018, “ECG fidu cia l po in t extr ac tion D esig n O bserv er Non Lini er Sw itc hed Sy stem s Ju n M ao, 201 9, “Sam pled - data outp ut fe edb ack sta bi liz at ion for a clas s o f switc hed sto chas th ic non l inear sy stem s” Estim asi p ada Nonlin ear swi tche d sy stem s Ali k aram i, 2017, “Robus t switc hing sig nal e st im ation for a c las s of unc er ta in non l inea r sw itc hed sy stem Desig n of sw it ched sy stem s D. Liberz on, 1 999, “B asi x probl em in stab il ity and des ig n of sw it ched sy st em s
R A Van den Beng
, 2006, “Conv erg ent desig n of swi tche d l ine ar sy stem s” Lini er Swi tch ed Sy stem s Ev isheng Z hai, 2001, “S tab il ity ana ly sis o f switc hed sy stem s with s tab le and un st abl e subsy stem s : An av er ag e dwell tim e appro ach ” Xuping Xu and G. Z hai, 20 05, “Pr act ic al stab il ity and st abi liz at ion of hy brid and switc hed sy stem s” Hail in , 20 09, “S tab il ity an d sta bi liz ebi lity of swi tch ed l ine ar sy stem : Asurv ey of rece nt resu lts ” Lei z hou, 20 1 3, “S tab ii ty analy sis of switc hed lin ea r si ng ulat sy stem s Stab il ity of sw it ched lin ear sy stem Jo se C. Ge rom e I , 2006, “Dy na m ic outpu t feedb ack sta bi liz at ion o f co ntin uous – Tim e Switched sy stem s S E Ham a m ci, 2014, “S tab iliz at ion o f switc hed sy stem using only A sing le fra ct iona l o rder PI control le r” Shuai Yu an, 201 8, “Con tro l of swi tched lin ear sy stem s adap tat ion and robu stn ess ” Lixi an Z hang , 2016, “M eto de – id ent ify ing tim e est and sw it ching de la y toler ant cont rol fo r swi tch ed sy stem s” Stab il ity of sw it ched lin ear sy stem Stab il ity of sw it ched lin ear sy stem
tidak diketahui. Selain itu, terdapat noise pengukuran output sehingga pergantian tidak dapat dideteksi dengan cepat, dan dengan demikian, makalah ini menyajikan suatu kondisi yang menghubungkan jumlah keterlambatan dengan ukuran gangguan atau noise yang tidak diketahui, input eksternal, dan state, serta kekuatan daya pengamatan. Setelah kondisi terpenuhi, pengamat dan algoritma yang diusulkan mengestimasi state dari subsistem yang aktif.
BAB IV
METODE
Bab ini menjelaskan langkah-langkah yang digunakan dalam penyelesaian masalah pada penelitian. Disamping itu, dijelaskan pula prosedur dan proses pelaksanaan tiap-tiap langkah yang dilakukan dalam menyelesaikan penelitian. 4.1 Tahapan Penelitian
Berdasarkan pada Bab Pendahuluan di atas, dan untuk mendesain sebuah algoritma estimasi Kalman firter pada sistem switching, beberapa tahapan penelitian yang dilakukan, antara lain:
1. Studi Literatur
Pada tahap ini mengumpulkan referensi yang didalamnya terdapat teori-teori dasar yang mendukung metode estimasi pada sistem switching. Selanjutnya, akan dipelajari lebih lanjut tentang sistem liquid level control. Selain itu, mempelajari penelitian-penelitian sebelumnya sebagai referensi pertimbangan ketika melakukan penarikan kesimpulan. 2. Desain Algoritma Estimasi Kalman Filter pada Sistem switching
Secara garis besar, tahapan yang dilakukan untuk mendesain algoritma estimasi pada sistem switching adalah sebagai berikut :
(a) Menganalisis keteramatan sistem switching yaitu sistem liquid level control. (Ketua Peneliti)
(b) Menentukan jenis pergantian pada sistem switching. (Anggota Peneliti 2)
(c) Melakukan estimasi sinyal switching pada sistem liquid level control dengan metode Kalman filter. (Anggota Peneliti 1)
(d) Mengestimasi nilai state pada subsistem yang aktif berdasarkan hasil estimasi dari sinyal switching. (Ketua Peneliti)
(e) Hasil estimasi pada sistem liquid level control dapat dianalisis dengan nelihat nilai error estimasi sinyal switching dan state. (Tim) 3. Implementasi Algoritma Estimasi pada Sistem Liquid Level Control
(a) Penurunan model pada sistem liquid level control dan penentuan subsistem serta pengaturan (aturan kerja sistem). (Ketua Peneliti) (b) Uji kebenaran algorirma estimasi pada sistem liquid level control dengan bantuan software MATLAB R2015a. (Anggota Peneliti 2) (c) Analisi hasil estimasi sinyal switching dan state. (Anggota Peneliti
1) 4. Kesimpulan
Pada tahap ini dilakukan penarikan kesimpulan dari hasil pembahasan dan simulasi serta disampaikan saran untuk perbaikan penelitian selan-jutnya. (Tim)
5. Pembuatan Laporan Penelitian
Pada tahap akhir ini dilakukan penulisan hasil yang telah diperoleh selama melakukan penelitian. (Tim)
4.2 Diagram Alur Metode Penelitian
Secara umum tahapan-tahapan yang dilakukan dalam menyelesaikan penelitian ini dapat ditampilkan dalam diagram alur penelitian pada Gambar 4.1.
BAB V
JADWAL DAN RANCANGAN ANGGARAN BIAYA
5.1 Jadwal
No Tahapan Penelitian Bulan
1 2 3 4 5 6 7 8
1. Studi Literatur
2. Desain Algoritma Estimasi Kalman Filter pada Sistem switching
3.
Implementasi Algoritma Estimasi pada Sistem Liquid Level Control
4. Kesimpulan
5. Pembuatan laporan penelitian 5.2 Anggaran Biaya
Rekapitulasi Anggaran
Uraian Sumber Dana
APBN Mitra Industri (Non APBN) Pengadaan Alat Tulis dan Bahan
Habis Pakai 13.620.000
Biaya Fotocopy Bahan 2.400.000
Belanja perjalanan 15.000.000
Biaya Publikasi 14.500.000
Biaya Konsumsi 2.800.000
Belanja Honorarium 1.600.000
1. Pengadaan Alat Tulis dan Bahan Habis Pakai
No Uraian Volume Satuan Biaya
Satuan
Jumlah (Rp)
1. Kertas HVS A4 10 Rim 45.000 450.000
2. HDD Eksternal 1 TB 1 Buah 1.200.000 1.200.000
3. Flashdisk 6 Buah 150.000 900.000
4. Toner Cardrige HP color laser jet CP1515n
10 Tube
toner
800.000 8.000.000
5. CDRW Blank 1 Box 320.000 320.000
6. Buku Teks 1 Buah 2.750.000 2.750.000
SUB TOTAL 13.620.000
2. Biaya Fotocopy Bahan
No Uraian Volume Satuan
Biaya
Satuan Jumlah (Rp)
1. Fotocopy bahan awal 6 Jilid 100.000 600.000
2. Fotocopy dan jilid laporan kemajuan
6 Jilid 150.000 900.000
3. Fotocopy dan jilid
laporan akhir 6 Jilid 150.000 900.000
SUB TOTAL 2.400.000
3. Biaya Perjalanan
No Uraian Volume Satuan Biaya
Satuan Jumlah (Rp) 1. Biaya perjalanan mengikuti konferensi internasional 3 Orang 5.000.000 15.000.000 SUB TOTAL 15.000.000
4. Biaya Publikasi
No Uraian Volume Satuan Biaya
Satuan
Jumlah (Rp)
1. Biaya seminar
internasional 1 Paper 4.500.000 4.500.000
2.
Biaya Publikasi Jurnal Internasional terindeks scopus (Q2) 1 Paper 10.000.000 10.000.000 SUB TOTAL 14.500.000 5. Biaya Konsumsi
No Uraian Volume Frek Biaya
Satuan Jumlah (Rp) 1. Konsumsi rapat koordinasi 6 16 30.000 2.880.000 SUB TOTAL 2.880.000 6. Belanja Honorarium No Uraian Volume Satuan (org/ mgg) Honor/ jam Jumlah (Rp) 1. Tenaga administrasi 8 8 25.000 1.600.000 SUB TOTAL 1.600.000
DAFTAR PUSTAKA
Apriliani, E. (2013), ‘Estimation and control design of mobile robot position’, Far East Journal of Mathematical Sciences 77, 115–124.
Domlan, E., Ragot, J. & Maquin, D. (2007), Active Mode Estimation for Switching Systems, 1143 – 1148.
Fliess, M., Join, C. & Perruquetti, W. (2008), Real-time estimation for switched linear systems, dalam 2008 47th IEEE Conference on Decision and Control, 941–946.
Fliess, M., Join, C. & Perruquetti, W. (2009), ‘Real-time estimation of the switching signal for perturbed switched linear systems’, IFAC Proceedings Volumes (IFAC-PapersOnline) 3.
Grewal, M. & Andrews, A. (2001), ‘Kalman filtering: theory and practice using MATLAB’, New York: John Wiley and Sons 14.
Guangming Xie & Wang, L. (2004), ‘Necessary and sufficient conditions for controllability and observability of switched impulsive control systems’, IEEE Transactions on Automatic Control 49(6), 960–966.
Hespanha, J. (2005), ‘Switching in Systems and Control [Book Review]’, Control Systems Magazine, IEEE 25, 97– 99.
Li, H. & Wang, X. (2016), ‘Adaptive tracking control for a class of uncertain switched nonlinear systems with time-delay’, Transactions of the Institute of Measurement and Control 40.
Liberzon, D. (2003), Switching in Systems and Control, Systems & Control: Foundations & Applications, Birkh¨auser Boston.
Liberzon, D. & Morse, A. (2001), ‘Basic problem in stability and design of switched systems’, IEEE Control Systems Magzine 19, 59–70.
Mahmoudi, A., Momeni, A., Aghdam, A. G. & Gohari, P. (2008), ‘Switching Between Finite-time Observers’, European Journal of Control 14(4), 297 – 307.
Medina, E. & Lawrence, D. (2008), ‘Reachability and observability of linear impulsive systems’, Automatica 44, 1304–1309.
Mincarelli, D., Floquet, T. & Belkoura, L. (2011), Active mode and switching time estimation for switched linear systems.
Ping, Z., Lee, C. & Shim, H. (2016), ‘Robust estimation algorithm for both switching signal and state of switched linear systems’, International Journal of Control, Automation and Systems 15.
Shim, H. & Tanwani, A. (2014), ‘Hybrid-type observer design based on a suffi-cient condition for observability in switched nonlinear systems’, Interna-tional Journal of Robust and Nonlinear Control 24.
Tabuada, P. (2009), Verification and Control of Hybrid Systems: A Symbolic Approach, 1st edn, Springer Publishing Company, Incorporated.
Tanwani, A., Shim, H. & Liberzon, D. (2013), ‘Observability for Switched Linear Systems: Characterization and Observer Design’, IEEE Transac-tions on Automatic Control 58(4), 891–904.
Tian, Y., Floquet, T., Belkoura, L. & Perruquetti, W. (2010), Switching time estimation for linear switched systems: An algebraic approach, 3909 – 3913.
Welch, G. & Bishop, G. (2006), ‘An Introduction to the Kalman Filter’, Proc. Siggraph Course 8.
Zhao, X., Yin, S., Li, H. & Niu, B. (2015), ‘Switching Stabilization for a Class of Slowly Switched Systems’, IEEE Transactions on Automatic Control 60(1), 221–226.
Biodata Tim Peneliti
1. Ketua Peneliti
a. Nama Lengkap : Prof. Dr. Erna Apriliani, M.Si b. NIP/NIDN : 19660414 199102 2 001/ 0014046606 c. Fungsional/Pangkat/Gol : Guru Besar/ Pembina Utama Madya /
IV D
d. Bidang Keahlian : Analisis Fungsional dan Metode asimilasi data
e. Departemen/Fakultas : Matematika/FSAD f. Alamat Rumah dan No.
Telp.
: Simo Sidomulyo 7A No 70 Surabaya, 081336674122
h. Riwayat Penelitian
No. Judul Penelitian Skema Penelitian Jabatan Tahun
1.
Tracking Lintasan dan Desain Kontrol Robot dengan
Menggunakan Modifikasi Kalman Filter dan Robust Control
PDUPT-Dikti Ketua 2019
2.
Estimasi Ketinggian Gelombang Laut Menggunakan Metode Ensemble Kalman Filter(Studi Kasus Laut di Selatan Pulau Jawa)
PDUPT-Dikti Ketua 2019
No. Judul Paper Penerbit Tahun
1.
Formation Control of
Multi-robot Motion Systems and State Estimation using Extended Kalman Filter
IEEE Proceeding 2019
2.
Tide Height Estimation on Southern Coast of Java Island by Ensemble Kalman Filter
IEEE Proceeding 2019
j. Paten :
-k. Tesis :
1. Penerapan Robust Kalman Filter dan Kontrol Konsensus pada Sistem Gerak Multi-robot
:
2. Tide Height Estimation on Southern Coast of Java Island by Ensemble Kalman Filter
2. Anggota Peneliti 1
a. Nama Lengkap : Dr. Didik Khusnul Arif, S.Si, M.Si b. NIP/NIDN : 19730930 199702 1 001/ 0030097304 c. Fungsional/Pangkat/Gol : Lektor/ Penata/ III C
d. Bidang Keahlian :
Reduksi Model dan Metode asimilasi data
e. Departemen/Fakultas : Matematika/FSAD f. Alamat Rumah dan No.
Telp. :
Perum ITS Blok U 35 Sukolilo Surabaya, 081216742218
h. Riwayat Penelitian
No. Judul Penelitian Skema Penelitian Jabatan Tahun
1.
Desain Desentralisasi Kendali H∞ Pada Sistem Storey Building Dengan Pendekatan Matrix Inequality
Dana ITS Ketua 2019
i. Publikasi :
No. Judul Paper Penerbit Tahun
1.
Centralized and Decentralized H∞ Controller for Storey Building Systems
IEEE Proceeding 2019
2.
Kalman Filter Estimation of Identified Reduced Model Using Balanced Truncation: a Case Study of the Bengawan Solo River
Nonlinear Dynamics and Systems Theory, 19 (4) (2019) 455-463
2019
j. Paten :
-k. Tesis :
1. Desain Sentralisasi dan Desentralisasi Kontrol H∞ dengan Pendekatan Linear Matrix Inequality
3. Anggota Peneliti 2
a. Nama Lengkap : Dr. Dieky Adzkiya, S.Si, M.Si b. NIP/NIDN : 19830517 200812 1 003/ 0017058302 c. Fungsional/Pangkat/Gol : Asisten Ahli/ Penata Muda Tingkat I /
III b
d. Bidang Keahlian : Verifikasi formal dan sistem max-plus e. Departemen/Fakultas : Matematika/FSAD
f. Alamat Rumah dan No.
Telp. :
Mulyorejo Utara gg. 3 No. 2 Surabaya, 081235011284
h. Riwayat Penelitian
No. Judul Penelitian Skema Penelitian Jabatan Tahun
1.
Desain Desentralisasi Kendali H∞ Pada Sistem Storey Building Dengan Pendekatan Matrix Inequality
Dana ITS
Anggota 2019
i. Publikasi :
-No. Judul Paper Penerbit Tahun
1.
VeriSiMPL 2: An open-source software for the verification of max-plus-linear systems Discrete Event Dynamic Systems, pp. 1-37 2015 2. Finite Abstractions of Max-Plus-Linear Systems IEEE Transactions on Automatic Control, vol. 58, no. 12, pp. 3039-3053 2013 j. Paten : -k. Tesis :
-DATA USULAN DAN PENGESAHAN PROPOSAL DANA LOKAL ITS 2020
1. Judul Penelitian
DESAIN ALGORITMA ESTIMASI KALMAN FILTER PADA SISTEM SWITCHING (STUDI KASUS : SISTEM LIQUID LEVEL CONTROL)
Skema : PENELITIAN PASCASARJANA
Bidang Penelitian : Sains Fundamental
Topik Penelitian : Model dan Optimasi Sistem 2. Identitas Pengusul
Ketua Tim
Nama : Prof. Dr. Dra. Erna Apriliani M.Si.
NIP : 196604141991022001
No Telp/HP : 081336674122
Laboratorium : Laboratorium Analisis Aljabar dan Pembelajaran Matematika Departemen/Unit : Departemen Matematika
Fakultas : Fakultas Sains dan Analitika Data Anggota Tim
No Nama
Lengkap Asal Laboratorium Departemen/Unit
Perguruan Tinggi/Instansi 1 Prof. Dr. Dra. Erna Apriliani M.Si. Laboratorium Analisis Aljabar dan Pembelajaran Matematika Departemen Matematika ITS 2 Didik Khusnul Arif S.Si, M.Si
Departemen Matematika ITS 3 Dieky Adzkiya S.Si, M.Si Laboratorium Analisis Aljabar dan Pembelajaran Matematika Departemen Matematika ITS
3. Jumlah Mahasiswa terlibat : 2 4. Sumber dan jumlah dana penelitian yang diusulkan
a. Dana Lokal ITS 2020 :
b. Sumber Lain :
50.000.000,-Tanggal Persetujuan Nama Pimpinan Pemberi Persetujuan Jabatan Pemberi Persetujuan Nama Unit Pemberi Persetujuan QR-Code 09 Maret 2020 Prof. Dr. Drs Agus Rubiyanto M.Eng.Sc. Kepala Pusat Penelitian/Kajian/Unggulan Iptek Sains Fundamental 09 Maret 2020 Agus Muhamad Hatta , ST, MSi, Ph.D Direktur Direktorat Riset dan Pengabdian Kepada Masyarakat