BAB II
KONTROL DAN PENGOPERASIAN
PEMBANGKIT ENERGI LISTRIK
2.1 Dasar Teori Pembangkitan Energi Listrik
Sesuai dengan hukum Biot Savart bahwa pada sebuah penghantar yang mengalirkan arus listrik akan menghasilkan medan magnet. Dan selanjutnya sesuai dengan hukum Faraday bila pada sebuah medan magnet yang berubah-ubah terdapat penghantar maka akan dihasilkan GGL ( Gaya Gerak Listrik ) induksi pada penghantar tersebut atau bisa juga medan magnetnya tidak berubah tetapi penghantarnya digerakkan juga akan menimbulkan GGL induksi.
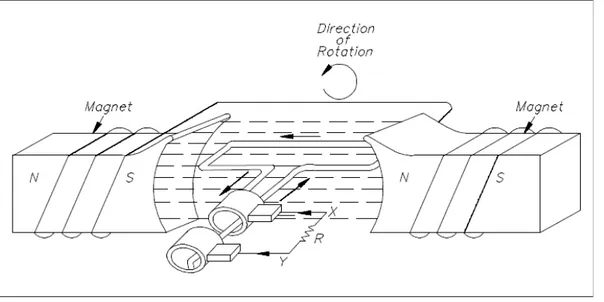
Dasar pembangkitan energi listrik pada pembangkit listrik bolak-balik dapat dilihat pada gambar 2.1 dibawah ini yag terdiri dari penghantar, satu putaran kawat di dalam medan magnet yang dihasilkan oleh elektromagnet. Kedua ujung kawat dihubungkan dengan slip ring dan bersentuhan dengan dua buah kawat.
Gambar 2.1 Pembangkitan listrik bolak balik sederhana ( Department Of Energy, Fundamental Hand Book volume 3, hal 1 ).
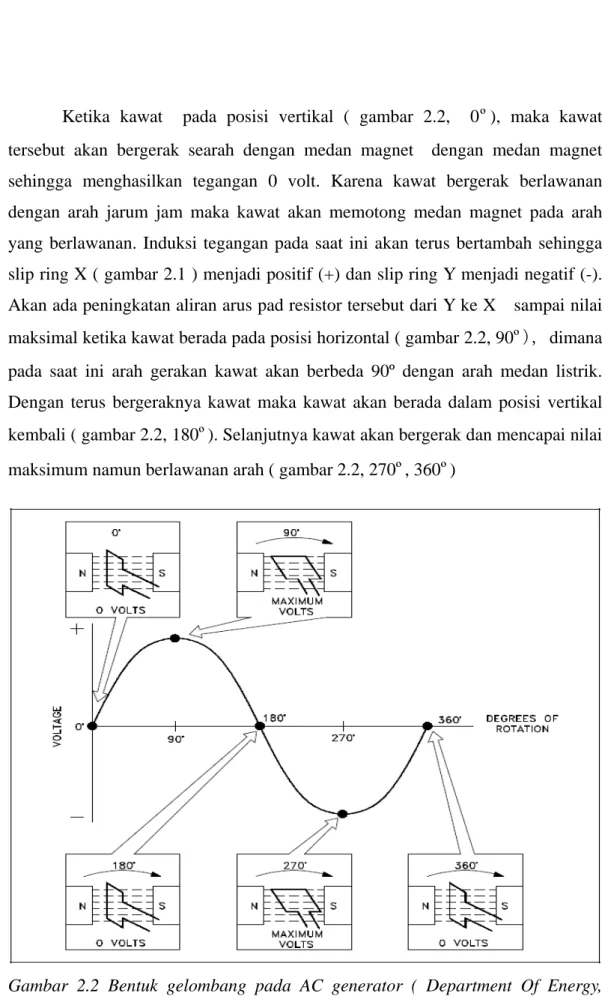
Ketika kawat pada posisi vertikal ( gambar 2.2, 0º), maka kawat tersebut akan bergerak searah dengan medan magnet dengan medan magnet sehingga menghasilkan tegangan 0 volt. Karena kawat bergerak berlawanan dengan arah jarum jam maka kawat akan memotong medan magnet pada arah yang berlawanan. Induksi tegangan pada saat ini akan terus bertambah sehingga slip ring X ( gambar 2.1 ) menjadi positif (+) dan slip ring Y menjadi negatif (-). Akan ada peningkatan aliran arus pad resistor tersebut dari Y ke X sampai nilai maksimal ketika kawat berada pada posisi horizontal ( gambar 2.2, 90º), dimana pada saat ini arah gerakan kawat akan berbeda 90º dengan arah medan listrik. Dengan terus bergeraknya kawat maka kawat akan berada dalam posisi vertikal kembali ( gambar 2.2, 180º). Selanjutnya kawat akan bergerak dan mencapai nilai maksimum namun berlawanan arah ( gambar 2.2, 270º, 360º)
Gambar 2.2 Bentuk gelombang pada AC generator ( Department Of Energy, Fundamental Hand Book volume 3 hal 2 )
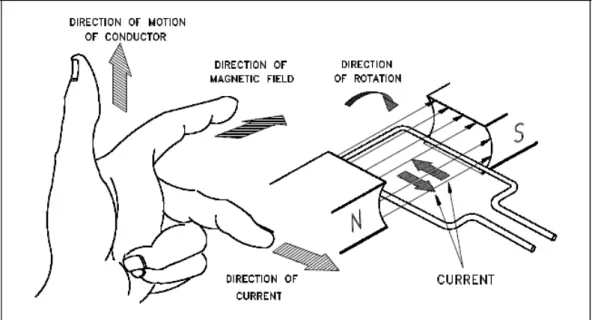
seperti ditunjukkan dalam gambar 2.3.
Gambar 2.3 Aturan tangan kiri ( Hukum Lorentz )
Teori pembangkitan listrik sebagian besar saat ini didasarkan pada teori tersebut, dimana energi mekanik diubah menjadi energi listrik melalui sebuah pembangkit listrik yang digerakkan oleh sebuah penggerak mula.
2.2 Penggerak utama ( prime mover ) Pembangkit Listrik
Penggerak utama ( prime mover ) banyak ragamnya namun hanya akan dibatasi pada prime mover pembangkit listrik yang banyak digunakan dalam industri perminyakan yang terpencil dan tidak terjangkau oleh aliran listrik dari perusahaan listrik Negara atau swasta. Dan juga dengan alasan lebih mudah mengendalikan pemakaian atau ketersediaan energi listrik, perusahaan minyak biasanya meyediakan sendiri kebutuhan energi listriknya.
Ada dua tipe penggerak utama yang dipakai pada industri perminyakan yaitu tipe piston ( reciprocating ) baik gas, diesel maupun kombinasi dan turbine baik gas, diesel maupun gabungan.
Tipe piston ( reciprocating ) selalu dipakai sebagai pembangkit listrik cadangan atau emergency generator karena waktu yang diperlukan untuk mencapai kecepatan sinkron relatif cepat rata-rata kurang dari satu menit. Dan
biasanya yang dipakai sebagai pembangkit cadangan atau emergency generator adalah pembangkit yang menggunakan mesin diesel.
2.3 Segitiga Daya
Pada rangkaian arus bolak balik AC, tidak semua daya listrik yang dihasilkan oleh pembangkit dapat digunakan semua untuk usaha atau kerja. Pada gambar 2.4 dapat diperhatikan bahwa energi yang dihasilkan oleh pembangkit adalah daya semu S dalam volt ampere (VA), daya yang dipakai adalah daya nyata P dalam watt dan daya yang terbuang atau tersimpan Q dalam VAR. Sudut fasa θ adalah mewakili efiensi yang berhubungan terhadap total impedansi Z dengan arus listrik yang mengalir pada rankaian tersebut. Segitiga daya merupakan perbandingan yang dapat digunakan untuk menentukan efisiensi dari
sebuah pembangkit listrik. Daya semu, daya nyata dan daya reaktif dapat dihitung dengan ekivalen DC ( nilai RMS ) dari arus AC bersamaan dengan power factor PF.
Gambar 2.4 Segitiga daya (Department Of Energy, Fundamental Hand Book volume 4, hal 68 )
2.3.1 Daya Semu
Daya semu adalah daya yang dialirkan kedalam sebuah rangkaian listrik. Satuan dari daya ini adalah volt ampere yang dapat ditulis dalam persamaan matematka sebagai berikut :
S = I²Z=IE……….…2.1 Dimana
S = Daya semu (VA) I = Arus RMS (A) E = Tegangan RMS (V) Z = Impedansi (Ω)
2.3.2 Daya Nyata
Daya nyata adalah daya yang dikomsumsi oleh beban resistif dari rangkaian. Satuan dari daya ini adalah Watt yang dapat ditulis dalam persamaan matematika sebagai berikut :
P = I²R = IE cos θ………..…2.2 dimana
P = daya nyata ( Watt ) I = Arus RMS (A) E = Tegangan RMS (V) R = Resistansi (Ω)
θ = Sudut antara E dan I dalam gelombang sinusoidal.
2.3.3 Daya Reaktif
Daya reaktif adalh daya yang timbul karena adanya beban induktif dan beban kapasitif dalam rangkaian. Daya reaktif ini dinyatakan dalam VAR ( volt ampere reactive ) yang dapat ditulis dalam persamaan matematika sebagai berikut :
Q = I²X = IE sin θ……….……….2.3 dimana
Q = Daya Reaktif (VAR) I = Arus RMS (A) E = Tegangan RMS (V)
θ = Sudut antara E dan I dalam gelombang sinusoidal.
2.3.4 Faktor Daya ( PF )
Total power yang dihasilkan oleh pembangkit listrik adalah daya semu S, daya yang dipakai oleh beban adalah daya nyata, sedangkan daya reaktif dikembalikan pada pembangkit listrik oleh rangkaian yang mengandung beban induktif maupun kapasitif.
Power Factor adalah perbandingan antara daya nyata dengan daya semu yang dapat dinyatakan dengan persamaan sebagai berikut :
P Cos θ = — ………...2.4 S dimana
Cos θ = Faktor Daya
P = Daya Nyata (Watt) S = Daya Semu (VA)
Pada gambar 2.5, dengan tegangan V sebagai referensi maka pada beban yang resistif tegangan berimpit dengan daya nyata P. Namun ketika beban bersifat induktif maka daya reaktif Q akan tertinggal 90°terhadap daya nyata P atau V, kondisi ini disebut lagging power factor .
Pada gambar 2.6, bila beban bersifat kapasitif akan menyebabkan daya reaktif mendahului daya nyata sebesar 90°, kondisi ini disebut dengan leading power factor.
Gambar 2.5 Faktor daya terbelakang
Gambar 2.6 Faktor daya mendahului
(Department Of Energy, Fundamental Hand Book volume 4, hal 70 )
2.4 Pengaturan Pembangkit Listrik
Pada dasarnya pengaturan pembangkit energi listrik itu terdiri dari dua dua bagian pengaturan yaitu bagian pengaturan daya nyata P atau pengaturan kecepatan dari penggerak utama dari pembangkit tersebut dan bagian pengaturan daya reaktif atau pengaturan tegangan.
Walaupun kedua pengaturan ini terpisah secara sistem namun keduanya akan saling mempengaruhi. Ketika kecepatan pembangkit turun maka tegangan juga akan mengalami penurunan.
Pemisahan kedua pengaturan ini didasarkan pada kemudahan dalam pembuatan skema pengaturan, karena dengan adanya pemisahan ini kita dapat melakukan pengukuran daya nyata dan daya reaktif melalui PT ( potential transformer ) dan CT ( current transformer ) yang selanjutnya akan dibandingkan dengan set point, dari hasil perbandingan ini akan digunakan oleh controller untuk melakukan perubahan setting atau tidak pada tegangan dan mesin penggerak dari pembangkit tersebut.
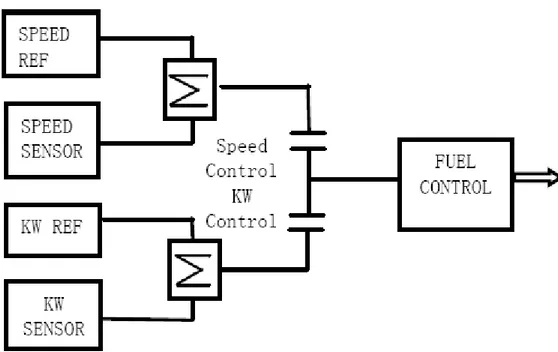
Gambar 2.7 Skema kontrol daya nyata ( Basler bulletin, parallel operation with network system, halaman 2 )
2.4.1 Pengontrolan Daya Nyata
Pada gambar 2.7 adalah sebuah contoh pengaturan pada daya nyata. Ketika generator berputar sensor MPU ( Magnetic Pickup ) akan mengirimkan signal ke controller, lalu controller akan membandingkan dengan signal dari watt sensor melalui PT dan CT. Sinyal dari MPU, PT dan CT akan dibandingkan dengan setelan kecepatan ( speed set point )t untuk selanjutnya digunakan oleh controller untuk merubah kecepatan prime mover atau tidak.
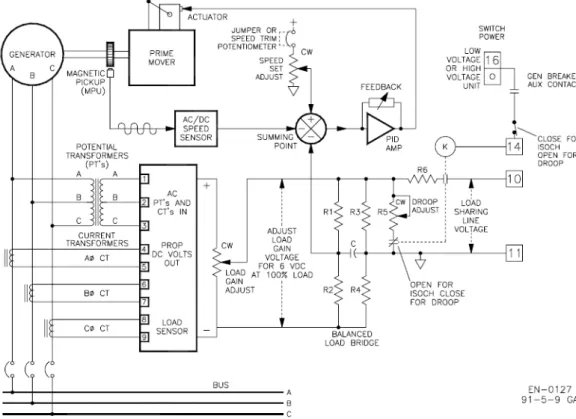
Gambar 2.8 adalah contoh rangkaian pengaturan daya, pada gambar tersebut semua informasi mengenai daya nyata didapatkan dari PT dan CT, dengan menghitung besaran dan sudut fasa hasil kedua pengukuran maka daya semu, daya nyata, daya reaktif dan factor daya akan bisa ditentukan yang selanjutnya dijadikan informasi untuk pengaturan daya output.
Gambar 2.8 Contoh sistem pengaturan sebuah pembangkit listrik ( Woodward, manual 26260 governing fundamental and power management,
hal 37 ).
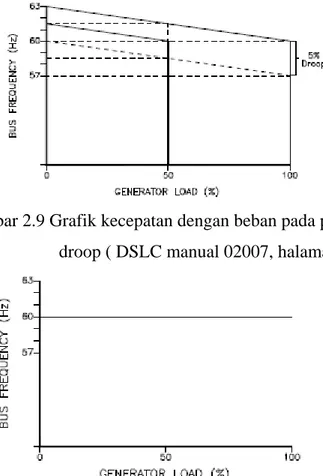
Pengaturan kecepatan mesin pada pembangkit listrik pada umumnya ada dua yaitu droop dan isochronous. Pada pembangkit dengan moda droop, maka frekwensi akan menurun seiring dengan kenaikan beban ( gambar 2.9 ). Sedangkan pembangkit dengan moda Isochronous ( gambar 2.10 ), maka pembangkit akan berusaha untuk mempertahankan frekwensi agar tetap konstan walaupun beban selalu berubah ubah selama masih dalam kurva kapabilitas dari pembangkit tersebut.
Gambar 2.9 Grafik kecepatan dengan beban pada pembangkit dengan moda droop ( DSLC manual 02007, halaman 68 )
Gambar 2.10 Grafik kecepatan dengan beban pada pembangkit dengan moda Isochronous ( DSLC manual 02007, halaman 69 )
2.4.2 Pengaturan Tegangan dan Daya Reaktif
Pada pembangkit listrik yang hanya digunakan untuk beroperasi sendiri, maka yang diperlukan adalah pengaturan tegangan otomatis atau manual untuk mendapatkan tegangan keluaran generator yang diinginkan.
Pengaturan tegangan pada pembangkit dapat dilakukan dengan beberapa cara seperti eksitasi dengan sikat, tanpa sikat, penguat DC eksitasi terpisah baik yang menggunakan rotating voltage regulator atau static voltage regulator. Namun, saat ini yang banyak dipakai dalam dunia perminyakan adalah yang tipe tanpa sikat ( brushless ) dan statis. Gambar berikut menunjukkan beberapa rangkaian pegaturan teegangan yang ada pada pembangkit listrik :
Gambar 2.11 Skema Pengaturan Daya Reaktif
Pada gambar 2.11 tegangan aktual akan diukur lalu dibandingkan dengan tegangan referensi, lalu selisih antara keduanya akan menjadi sinyal untuk digunakan pada proses selanjutnya. Dilain pihak. KVAR atau PF juga diukur dan dibandingkan dengan KVAR atau PF referensi dan selisih sinyal antara keduanya akan digunakan untuk proses selanjutnya. Pada gambar tersebut terlihat bahwa, operator dapat memilih jenis pengontrolan eksitasi apakah menggunakan voltage control atau KVAR/PF control. Field power akan menentukan sinyal menaikkan atau menurunkan tegangan.
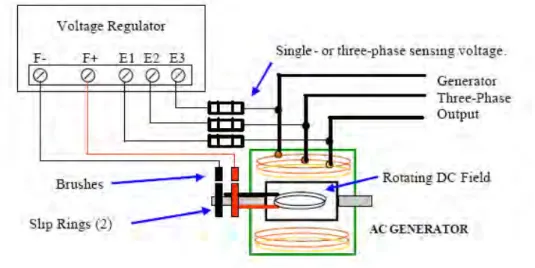
Gambar 2.12 Pengaturan tegangan dengan eksitasi yang menggunakan sikat. ( Buletin Kilowatt Classroom LLC, Generator Voltage Regulation Excitation Methods )
Pada gambar 2.12, tegangan keluaran pembangkit akan diukur melalui E1,E2 dan E3 selanjutnya voltage regulator akan membandingkan dengan setelan dan selisih keduanya akan digunakan sebagai sinyal untuk mengatur besarnya arus yang mengalir dari F+ dan F- melalui slip rings. Karena impedansi dari eksitasinya relative sama, maka perubahan tegangan eksitasi akan sebanding dengan arus eksitasi.
Gambar : 2.13 Pengaturan tegangan dengan penguat eksitasi DC terpisah. ( Buletin Kilowatt Classroom LLC, Generator Voltage Regulation Excitation Methods )
Paada gambar 2.13 arus yang dikeluarkan oleh voltage regulator melalui F+ dan F- digunakan untuk eksitasi generator DC. Selanjutnya melalui slip rings dan komutator digunakan untuk menghasilkan arus eksitasi ke pembangkit.
Gambar 2.14 Pengaturan tegangan terpisah tanpa sikat ( brushless ). ( Buletin Kilowatt Classroom LLC, Generator Voltage Regulation Excitation Methods )
Pada dunia perminyakan dan gas bumi tipe seperti pada gambar 2.14 yang banyak digunakan karena tidak menimbulkan percikan api. Arus keluaran dari F+ dan F- akn menghasilkan medan magnet tetap, lalu ketika pembangkit berputar akan ada perubahan medan magnet sehingga timbul GGL induksi dalam penghantar/coil. Penghantar atau coil ini biasanya fasa 3 ada yang terhubung WYE dan ada juga yang terhubung Delta, selanjutnya tegangan AC yang dihasilkan akan disearahkan sehingga timbul arus DC di rotor utama. Karena rotor bergerak maka timbul GGL induksi di stator. Tegangan keluaran dari stator selanjutnya akan diukur secara kontinyu oleh voltage regulator untuk dibandingkan dengan setelan sebagai penentu besarnya arus yang dialirkan melalui F+ dan F-. Pada pembangkit listrik yang beroperasi sendiri ( isolated atau islanded ) maka ketika eksitasi dinaikkan atau diturunkan akan menyebabkan tegangan
keluaran dari pembangkit akan naik atau turun sesuai dengan besarnya eksitasi. Namun, pada pembangkit yang beroperasi parallel dengan pembangkit lain maka perubahan eksitasi akan menyebabkan adanya perubahan VAR dari pembangkit tersebut. Ketika tegangan dari pembangkit lebih besar dari tegangan dalam sistem ( tegangan tanpa beban ), maka pembangkit tersebut akan mengeluarkan ( export ) VAR sehingga power factor menjadi tertinggal (lagging). Sebaliknya, ketika tegangan dari pembangkit itu lebih kecil dari tegangan sistem ( tegangan tanpa beban ), maka pembangkit tersebut akan menerima ( import ) VAR sehingga power factor menjadi mendahului (leading).
2.5 Sinkronisasi dan Operasi Paralel Pembangkit Listrik
Sinkronisasi dalam dunia pembangkitan energi listrik didefinisikan sebagai kondisi dimana bentuk gelombang tegangan dari satu pembangkit listrik sama dengan bentuk gelombang dengan pembangkit lain baik dalam hal amplitude, frekwensi maupun sudut fasanya.
Agar pembangkit listrik bisa beroperasi parallel maka kondisi sinkron antara pembangkit-pembangkit tersebut harus tercapai. Ada lima syarat pembangkit itu dikatakan sinkron yaitu :
1. Mempunyai jumlah fasa yang sama. 2. Arah putaran yang sama.
3. Frekwensi sama
4. Besarnya tegangan sama 5. Sudut fasa sama
2.5.1 Sinkronisasi antar Pembangkit Listrik
Ketika pembangkit listrik dioperasikan parallel maka kedua pembangkit itu haus bias disikronkan dulu dengan benar bila tidak maka akan terjadi kerusakan baik dikarenakan ada kejutan system kelistrikannya ataupun tekanan mekanis. Hal ini bisa mengganggu kestabilan system kelistrikan ataupun merusak pembangkit listrik itu sendiri.
peralatan yang dibutuhkan untuk menyelesaikan sinkronisasi secara manual adalah lampu indikator, synchroscope, synch check relay dan saklar untuk parallel.
Gambar 2.15 menunjukkan salah satu metode untuk memeriksa apakah sefasa atau tidak, ketika lampu menyala maka dikatakan tidak sefasa dan ketika lampu padam dikatakan sefasa.
Gambar 2.15 Indikasi kesamaan fasa ( Manual 26260 Woodward,
Governing Fundamental and Power Management ).
Pada gambar 2.16 menunjukkan salah satu metode untuk memeriksa apakah sefasa dan rotasinya juga sama. Ketika rotasi dan fasa sama maka keempat lampu akan padam, dan ketika keempatnya menyala berarti rotasinya sama tetapi tidak sefasa. Dan kalau sepasang lampu ada yang padam dan sepasang lagi menyala berarti arah rotasinya berbeda.
Gambar 2.16 Indikasi kesamaan fasa dan arah rotasi ( Manual 26260 Woodward, Governing Fundamental and Power Management ).
Pada sinkronisasi otomatis, maka alat yang dibutuhkan adalah synchronizer dan sync check relay sedangkan lampu indikator tidak wajib ada. Namun karena biasanya suatu system itu dilengkapi kemampuan untuk snkronisasi manual dan otomatis maka synchroscope, lampu indikator dan saklar juga diperlukan.
Pada sinkronisasi otomatis semua perhitungan dilakukan dalam internal synchronizer yang kemudian memberikan sinyal sinkron dan akan dikonfirmasi oleh synch check relay. Bila kondisinya masuk dalam rentang setting yang telah ditetapkan, maka sync check relay akan memberikan sinyal untuk menutup breaker.
2.5.2 Operasi Paralel Pembangkit Listrik
Ada beberapa kombinasi dalam operasi paralel pembangkit listrik diantaranya :
1. Satu pembangkit isochronous sedangkan yang lain droop atau base load.
2. Semua pembangkit beroperasi droop
harus saling terhubung sehingga bisa melakukan pembagian dengan generator isochronous yang lain dengan tepat. Karena bila tidak maka pembangkit yang satu akan mengambil semua daya yang ada di pembangkit isochronous yang lain atau sebaliknya.
4. Semua pembangkit beroperasi isochronous, biasanya kombinasi seperti ini dipakai ketika mempunyai pembangkit dengan spesifikasi sama dan jaraknya tidak berjauhan.
2.6 Programmable Logic Controller
Programmable logic controller adalah sebuah peralatan yang dirancang untuk menggantikan relai-relai dalam membuat rangkaian listrik yang sesuai dengan skema kontrol yang diinginkan dan umumnya disebut PLC.
PLC itu terdiri dari CPU ( controller ), back plane, I/O module ( digital maupun analog ), Power supply, dan modul untuk komunikasi.
Untuk bisa melakukan pemrograman dalam PLC diperlukan perangkat lunak untuk bisa berkomunikasi dengan PLC tersebut dan setiap PLC mempunyai perangkat lunak yang berbeda. Saat ini banyak tipe PLC contohnya, Allen Bradley ( AB ), Simatic ( Siemens ), Melsec ( Mitsubishi ), Omron, Hitachi, GEFanuc, Modicon ( Schneider ) dan sebagainya.
Dalam tugas akhir PLC yang dipakai adalah Allen Bradley tipe ControlLogix 5556, dengan perangkat lunak untuk pemrograman RSLogix 5000 dan software untuk komunikasi RSLinx. Kedua perangkat lunak ini adalah software minimal yang harus dimiliki ketika akan membuat program PLC pada ControlLogix seri 5000.