iii TESIS – TE142599
EKSPERIMEN DETEKSI EKSENTRISITAS STATIS CELAH
UDARA MOTOR INDUKSI MELALUI ANALISA FREKUENSI
RESOLUSI PADA ARUS STATOR
BELLY YAN DEWANTARA 2215201341
DOSEN PEMBIMBING
Dr. Dimas Anton Asfani, S.T., M.T
Dr.Eng. I Made Yulistya Negara, S.T., M.Sc
PROGRAM MAGISTER
BIDANG KEAHLIAN TEKNIK SISTEM TENAGA DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNOLOGI ELEKTRO
INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA
TESIS – TE142599
EKSPERIMEN DETEKSI EKSENTRISITAS STATIS CELAH
UDARA MOTOR INDUKSI MELALUI ANALISA FREKUENSI
RESOLUSI PADA ARUS STATOR
BELLY YAN DEWANTARA 2215201341
DOSEN PEMBIMBING
Dr. Dimas Anton Asfani, S.T., M.T
Dr.Eng. I Made Yulistya Negara, S.T., M.Sc
PROGRAM MAGISTER
BIDANG KEAHLIAN TEKNIK SISTEM TENAGA DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNOLOGI ELEKTRO
INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA
iv
v
PERNYATAAN KEASLIAN TESIS
Dengan ini saya menyatakan bahwa isi keseluruhan Tesis saya dengan
judul “EKSPERIMEN DETEKSI EKSENTRISITAS STATIS CELAH UDARA MOTOR INDUKSI MELALUI ANALISA FREKUENSI
RESOLUSI PADA ARUS STATOR” adalah benar-benar hasil karya intelektual mandiri, diselesaikan tanpa menggunakan bahan-bahan yang tidak diijinkan dan bukan merupakan karya pihak lain yang saya akui sebagai karya sendiri.
Semua referensi yang dikutip maupun dirujuk telah ditulis secara lengkap pada daftar pustaka. Apabila ternyata pernyataan ini tidak benar, saya bersedia menerima sanksi sesuai peraturan yang berlaku.
Surabaya, 07 Juni 2017
vi
vii
EKSPERIMEN DETEKSI EKSENTRISITAS STATIS CELAH
UDARA MOTOR INDUKSI MELALUI ANALISA FREKUENSI
RESOLUSI PADA ARUS STATOR
Nama mahasiswa : Belly Yan Dewantara
NRP : 2215202341
Pembimbing : 1. Dr. Dimas Anton Asfani, S.T, M.T
2. Dr.Eng. I Made Yulistya Negara, S.T, M.Sc
ABSTRAK
Penelitian ini membahas tentang eksperimental deteksi gangguan eksentrisitas celah udara pada motor induksi dengan menggunakan analisis frekuensi pada arus stator. Algoritma fast fourier transform digunakan untuk analisis arus stator dari domain waktu kedalam domain frekuensi. Deteksi eksentrisitas celah udara dilakukan dengan mengamati amplitudo pada frekuensi eksentrisitas yang muncul disekitar frekuensi fundametal. Resolusi frekuensi digunakan untuk mengatur tingkat akurasi pengamatan amplitudo pada spektrum frekuensi. Penelitian ini juga menganalisa kegunaan resolusi frekuensi yang tepat untuk diterapkan pada sistem deteksi eksentrisitas agar supaya tidak ada frekuensi yang tidak diinginkan muncul di sekitar frekuensi fundamental, hal ini digunakan untuk mengidentifikasi frekuensi eksentrisitas dengan jelas. Hasil percobaan menunjukkan bahwa metode analisis melalui frekuensi arus stator pada motor induksi dapat dengan jelas mendeteksi gangguan eksentrisitas celah udara dengan menerapkan frekuensi resolusi 0,5 hz hingga 1 hz.
viii
ix
EXPERIMENT DETECTION OF STATIC AIR GAP
ECCENTRICITY IN INDUCTION MOTOR BASED ON
RESOLUTION FREQUENCY ANALYSIS
ON STATOR CURRENT
By : Belly Yan Dewantara
Student Identity Number : 2215201341
Supervisors : 1. Dr. Dimas Anton Asfani, S.T, M.T
2. Dr.Eng. I Made Yulistya Negara, S.T, M.Sc
ABSTRACT
The contents of this research discusses experimental analysis to detect the air gap eccentricity faults on induction motor using frequency analysis on stator current. Fast fourier transform algorithm is used for frequency analysis on stator current. Detection of air gap eccentricity is carried out by observing the sideband frequency that seen around fundametal frequency. The frequency resolution is used to set the accuracy level in the sideband frequency observation. Improper use of frequency resolution can result the supply frequency component. This study also tested the usefulness of the appropriate frequency resolution to be applied to eliminate the supply frequency components, this is to identify the eccentricity frequency that is indicative of air gap eccentricity. The results of the experiment reported that the motor current signature analysis method can clearly detect the air gap eccentricity by applying a resolution frequency of 0,5 hz - 1 hz.
x
xi
KATA PENGANTAR
Alhamdulillah, segala puji bagi Allah SWT karena atas limpahan karunia rahmat-Nya sehingga karya akhir yang berjudul “Eksperimen Deteksi Eksentrisitas Statis Celah Udara Motor Induksi melalui Analisa Frekuensi Resolusi pada Arus Stator” ini dapat terselesaikan dengan baik tepat pada waktunya. Untuk itu penulis ingin mengucapkan terima kasih yang sebesar-besarnya kepada :
1. Bapak Prof. Ir. Joni Hermana M.Sc.ES., Ph.D., selaku Rektor Institut Teknolgi Sepuluh Nopember Surabaya,
2. Bapak Dr. Tri Arief Sardjono, S.T., M.T., selaku Dekan Fakultas Teknologi Elektro Institut Teknolgi Sepuluh Nopember,
3. Bapak Dr.Eng. Ardyono Priyadi, S.T., M.Eng., selaku Kepala Departemen Teknik Elektro Institut Teknolgi Sepuluh Nopember,
4. Bapak Dr. Dimas Anton Asfani, S.T, M.T dan Bapak Dr. I Made Yulistya Negara, S.T, M.Sc selaku dosen pembimbing tesis saya atas kesediaan dan kesabarannya dalam memberikan bimbingan dan ilmu pada penulis,
5. Para dosen dan karyawan Institut Teknolgi Sepuluh Nopember yang banyak membantu dalam proses perkuliahan,
6. Seluruh keluarga besar saya, Bapak, Kakak, Adek atas segala doa dan dukungan yang diberikan,
7. Teman-teman Teknik Sistem Tenaga ITS 2015 (Restu-Samarinda, Rani-Makasar, Daeng-Pamekasan, Mbak Ina-Nganjuk, Mbak Eva-Bengkalis, Abi-Sidoarjo, Evin-Abi-Sidoarjo, Ari-Pamekasan, Pak Samsudin-Abi-Sidoarjo, Samudra-Surabaya, Fajar-Lamongan, Om Hedi-Sampang dan Thoeurn Muy-Cambodia) atas kebersamaan selama ini.
Akhir kata, segala kritik dan saran penulis perlukan demi penyempurnaan karya akhir ini, dan semoga karya akhir ini bermanfaat bagi banyak pihak.
xii
xiii
DAFTAR ISI
LEMBAR PENGESAHAN ... iii
PERNYATAAN KEASLIAN TESIS ... v
ABSTRAK ... vii
DAFTAR SINGKATAN DAN SIMBOL ... xix
BAB 1 PENDAHULUAN ... 1
1.1 Latar Belakang ... 3
1.2 Rumusan Masalah ... 3
1.3 Tujuan Penelitian ... 3
1.4 Batasan Masalah ... 4
1.5 Kontribusi ... 4
1.6 Metodologi Penelitian... 4
BAB 2 KAJIAN PUSTAKA DAN DASAR TEORI ... 7
2.1 Motor Induksi ... 7
2.1.1 Kontruksi motor induksi ... 7
2.1.2 Prinsip kerja motor induksi ... 8
2.2 Eksentrisitas Celah Udara ... 10
2.2.1 Eksentrisitas akibat kecacatan stator... 11
2.2.2 Eksentrisitas akibat kerusakan bearing ... 12
2.3 Hubungan Kerusakan Komponen dengan Celah Udara ... 15
2.3.1 Pengaruh kerusakan outer bearing terhadap celah udara ... 15
2.3.2 Pengaruh kerusakan inner bearing terhadap celah udara ... 15
2.4 Airgap Permeance ... 16
2.5 Kerapatan Fluks Celah Udara ... 16
2.6 Hubungan Eksentrisitas Celah Udara dengan Arus Stator ... 17
xiv
BAB 3 METODOLOGI PENELITIAN... 21
3.1 Diagram Alir Penelitian ... 21
3.2 Pembebanan pada Motor ... 23
3.3 Proses Akuisisi Data ... 25
3.4 Rekontruksi Eksentrisitas Celah Udara ... 28
3.5 Perancangan Sistem Pengukuran dan Pengolahan Data ... 30
BAB 4 HASIL PENGUJIAN DAN ANALISA DATA ... 33
4.1 Perhitungan Presentasi Pembebanan ... 34
4.2 Analisa Arus Stator pada Kondisi Normal dan Eksentrisitas ... 35
4.3 Pengukuran Slip pada Motor Kondisi Normal dan Kondisi Eksentrisitas ... 36
4.4 Analisa Letak Frekuensi Eksentrisitas Celah Udara ... 37
4.5 Hasil Analisa Deteksi Frekuensi Eksentrisitas Celah Udara ... 38
4.5.1 Analisa spektrum frekuensi eksentrisitas pada beban 0%... 39
4.5.2 Analisa spektrum frekuensi eksentrisitas pada beban 25% ... 46
4.5.3 Analisa spektrum frekuensi eksentrisitas pada beban 50% ... 54
4.5.4 Analisa spektrum frekuensi eksentrisitas pada beban 75% ... 59
4.5.5 Analisa spektrum frekuensi eksentrisitas pada beban 100% ... 64
BAB 5 PENUTUP ... 71
5.1 Simpulan ... 71
5.2 Saran ... 72
xv
DAFTAR GAMBAR
Gambar 2.1 Komponen Motor Induksi, (a) Stator, (b) Rotor ... 8
Gambar 2.2 (a) Motor normal, (b) Eksentrisitas statis, (c) Eksentrisitas dinamis ... 10
Gambar 2.3 Eksentrisitas tipe cylindical whirling motion ... 12
Gambar 2.4 Kesalahan instalasi bearing ... 13
Gambar 2.5 Eksentrisitas celah udara tipe Symetrical conical whirling motion ... 13
Gambar 2.6 Konstruksi bearing motor induksi ... 14
Gambar 2.7 Eksentrisitas akibat kerusakan outer ring... 14
Gambar 2.8 Eksentrisitas akibat kerusakan inne ring ... 14
Gambar 3.1 Diagram alir percobaan ... 21
Gambar 3.2 Konfigurasi sistem deteksi eksentrisitas celah udara ... 22
Gambar 3.3 Motor Induksi 3 Fasa ... 23
Gambar 3.4 Perangkat pembebanan berupa lampu ... 24
Gambar 3.5 Generator sinkron ... 24
Gambar 3.6 Alat akuisisi data merk NI-DAQ 9246 ... 25
Gambar 3.7 Implementasi sistem deteksi eksentrisitas celah udara ... 26
Gambar 3.8 Bearing normal tanpa rekontruksi outer 52 mm dan inner 25 mm ... 28
Gambar 3.9 Ring dengan ketebalan berbeda 0.1 mm ... 28
Gambar 3.10 Ring dengan ketebalan berbeda 0.2 mm ... 29
Gambar 3.11 a) Perbandingan ukuran bearing normal dengan bearing pengganti, b) Bearing pengganti dengan ring eksentrik... 29
Gambar 3.12 Skema eksentrisitas celah udara... 30
Gambar 4.1 Perbandingan slip motor normal dan terjadi eksentrisitas ... 36
Gambar 4.2 Spektrum frekuensi pada motor dengan frekuensi resolusi 2 hz pada pembebanan 0%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm ... 40
Gambar 4.3 Spektrum frekuensi pada motor dengan frekuensi resolusi 1 hz pada pembebanan 0%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm ... 41
Gambar 4.4 Spektrum frekuensi pada motor dengan frekuensi resolusi 0,5 hz pada pembebanan 0%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm ... 42
Gambar 4.5 Spektrum frekuensi pada motor dengan frekuensi resolusi 0,1 hz pada pembebanan 0%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm ... 44
xvi
Gambar 4.7 Spektrum frekuensi pada motor dengan frekuensi resolusi 2 hz pada pembebanan 25%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm ... 46 Gambar 4.8 Spektrum frekuensi pada motor dengan frekuensi resolusi 1 hz
pada pembebanan 25%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm ... 48 Gambar 4.9 Spektrum frekuensi pada motor dengan frekuensi resolusi 0,5
hz pada pembebanan 25%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm ... 49 Gambar 4.10 Spektrum frekuensi pada motor dengan frekuensi resolusi 0,1
hz pada pembebanan 25%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm ... 51 Gambar 4.11 Spektrum frekuensi pada motor dengan frekuensi resolusi 0,02
hz pada pembebanan 25%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm ... 52 Gambar 4.12 Spektrum frekuensi pada motor dengan frekuensi resolusi 2 hz
pada pembebanan 50%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm ... 54 Gambar 4.13 Spektrum frekuensi pada motor dengan frekuensi resolusi 1 hz
pada pembebanan 50%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm ... 55 Gambar 4.14 Spektrum frekuensi pada motor dengan frekuensi resolusi 0,5
hz pada pembebanan 50%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm ... 56 Gambar 4.15 Spektrum frekuensi pada motor dengan frekuensi resolusi 0,1
hz pada pembebanan 50%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm ... 57 Gambar 4.16 Spektrum frekuensi pada motor dengan frekuensi resolusi 0,02
hz pada pembebanan 50%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm ... 58 Gambar 4.17 Spektrum frekuensi pada motor dengan frekuensi resolusi 2
hz pada pembebanan 75%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm ... 59 Gambar 4.18 Spektrum frekuensi pada motor dengan frekuensi resolusi 1
hz pada pembebanan 75%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm ... 60 Gambar 4.19 Spektrum frekuensi pada motor dengan frekuensi resolusi 0,5
hz pada pembebanan 75%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm ... 61 Gambar 4.20 Spektrum frekuensi pada motor dengan frekuensi resolusi 0,1
xvii
Gambar 4.21 Spektrum frekuensi pada motor dengan frekuensi resolusi 0,02 hz pada pembebanan 75%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm ... 63 Gambar 4.22 Spektrum frekuensi pada motor dengan frekuensi resolusi 2 hz
pada pembebanan 100%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm ... 64 Gambar 4.23 Spektrum frekuensi pada motor dengan frekuensi resolusi 1 hz
pada pembebanan 100%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm ... 65 Gambar 4.24 Spektrum frekuensi pada motor dengan frekuensi resolusi 0,5
hz pada pembebanan 100%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm ... 66 Gambar 4.25 Spektrum frekuensi pada motor dengan frekuensi resolusi 0,1
hz pada pembebanan 100%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm ... 67 Gambar 4.26 Spektrum frekuensi pada motor dengan frekuensi resolusi 0,02
xviii
xix
DAFTAR TABEL
Tabel 3.1 Spesifikasi Motor Induksi 3 Fasa ...23
Tabel 4.1 Frekuensi resolusi ...33
Tabel 4.2 Skema pengambilan data ...34
Tabel 4.3 Perbandingan pembebanan pada motor induksi dalam persen...34
Tabel 4.4 Hasil pengukuran arus stator pada kondisi normal dan kondisi eksentrisitas ...35
Tabel 4.5 Hasil pengukuran slip pada motor induksi ...36
Tabel 4.6 Letak spektrum frekuensi eksentrisitas pada kondisi normal ...37
Tabel 4.7 Letak spektrum frekuensi eksentrisitas pada kondisi eksentrisitas 0,1 mm ...38
Tabel 4.8 Letak spektrum frekuensi eksentrisitas pada kondisi eksentrisitas 0,2 mm ...38
xx
xxi
DAFTAR SINGKATAN DAN SIMBOL
A. SINGKATAN
FFT : Fast Fourier Transform DFT : Discrete Fourier Transform GGL : Gaya Gerak Listrik
DC : Direct Current AC : Alternating Current HP : Horse power
DAQ : Data acquisition system ADC : Analog to Digital Converter
TDMS : Technical Data Management Streaming VI : Virtual Instruments
B. SIMBOL
π : Nilai derajat dalam setengah ayunan Va : Tegangan pada fasa A
Vb : Tegangan pada fasa B Vc : Tegangan pada fasa C
Vm : Nilai puncak dari frekuensi fundamental dari masing-masing tegangan fasa
Ia : Arus pada fasa A Ib : Arus pada fasa B Ic : Arus pada fasa C
Im : Nilai puncak dari frekuensi fundamental dari masing-masing arus fasa
ω : Frekuensi elektrik fundamental (rad/s) t : waktu (detik)
fHE : Frekuensi eksentrisitas pada frekuensi orde tinggi
fLE : Frekuensi eksentrisitas pada frekuensi sekitar fundamental k : Konstanta (1, 2, 3, . . .)
R : Jumlah slot nd : Orde eksentrisitas
v : Orde dari waktu harmonisa stator yang terjadi pada motor fbng : Frekuensi bearing
xxii fb : Frekuensi kerusakan bola bearing fc : Frekuensi kerusakan rumah bearing NB : Jumlah bola
frm : Frekuensi kecepatan putaran rotor DB : Diameter bola
DP : Diameter antar bola
: Sudut kontak bola (diasumsikan 00) X(k) : Sinyal diskrit
: Frekuensi resolusi Fs : Frekuensi sampling Ts : Periode sampling Ns : Jumlah sampling
Hp : Satuan daya setara 0,735 kilowatt
A : Satuan arus ampere
V : Satuan tegangan dalam volt
Rpm : Satuan kecepatan dalam radian per menit Hz : Satuan frekuensi
AMB : Maximum ambient temperature in centigrade Ins : Kelas isolasi pada motor
1
BAB 1
PENDAHULUAN
1.1 Latar Belakang
Motor induksi merupakan peralatan yang penting dalam industri karena sebagian besar proses kerja dalam industri menggunakan motor induksi. Oleh karena itu kondisi motor induksi harus selalu dijaga sehingga motor tetap bekerja secara optimal serta memperpanjang masa pakai motor induksi [1]. Meski demikian, seiring dengan masa pakai dari motor tersebut maka memungkinkan motor mengalami kerusakan pada komponen-komponen tertentu dan harus dihentikan operasinya. Hal ini tentunya akan menyebabkan kerugian finansial yang besar bagi industri serta dapat juga membahayakan pekerja yang ada disekitarnya, terutama pada motor kapasitas besar yang memakan waktu dan biaya yang cukup besar untuk perbaikan [2]. Maka dari itu perlu dilakukan pengawasan secara rutin sehingga perkembangan kondisi motor induksi dapat dipantau dengan baik.
Berdasarkan [2], persentase kerusakan yang sering terjadi pada motor induksi adalah 41% dikarenakan kerusakan bearing, 37% dikarenakan kerusakan stator, 10% dikarenakan kerusakan rotor dan 12% kerusakan lain-lainnya. Dari beberapa tipe kerusakan pada motor induksi dapat menyebabkan terjadinya eksentrisitas pada celah udara motor seperti kerusakan bearing yang diakibatkan pemasangan bearing yang tidak benar, kerusakan stator yang disebabkan oleh keovalan pada inti stator, kerusakan rotor yang biasanya disebabkan oleh ketidaksejajaran poros rotor akibat kesalahaan pengkopelan pada beban [3]. Eksentrisitas celah udara mengakibatkan daya tarik magnetik jadi tidak seimbang. Eksentrisitas celah udara yang tidak terdeteksi sejak dini memungkinkan terjadinya gesekan antara rotor dan inti stator dan menjadi kerusakan yang serius pada komponen motor lainnya [4].
2
kerusakan yang serius. Terdapat beberapa cara untuk mendeteksi gangguan pada motor induksi, diantaranya melalui analisa perubahan pola getaran, perubahan arus, perubahan frekuensi, perubahan kecepatan, perubahan temperatur, dan perubahan torsi [5].
3
peneliti, hal ini dikarenakan metode ini tidak memerlukan peralatan tambahan pada komponen motor sehingga tidak memerlukan biaya yang mahal dan mudah juga diimplementasikan. Metode ini juga dilakukan pada penelitian kami dalam pendeteksian eksentrisitas celah udara pada motor induksi.
Berdasarkan [10], metode analisa arus stator memerlukan pengamatan frekuensi arus stator pada saat motor beroperasi dalam keadaan normal, karakteristik frekuensi arus stator yang didapat dijadikan referensi penentu kondisi gangguan motor. Karakteristik frekuensi arus stator dipengaruhi oleh pemberian nilai frekuensi resolusi. Hal ini tentu menjadi keterbatasan kemampuan pada sistem pendeteksi, dimana sistem tidak dapat bekerja pada motor yang belum diketahui karakteristik frekuensi pada saat keadaan normal. Penelitian ini dilakukan percobaan deteksi gangguan pada motor induksi melalui analisa arus stator dengan memfokuskan pada penggunaan frekuensi resolusi. Penentuan frekuensi resolusi yang tepat untuk diterapkan pada analisa deteksi eksentrisitas bertujuan untuk membuat sistem deteksi dapat menginditifikasi eksentrisitas celah udara tanpa lagi memerlukan referensi spektrum frekuensi pada motor normal.
1.2 Rumusan Masalah
Bagaimana eksentristas celah udara pada motor dapat dideteksi dengan menggunakan analisa arus stator dan bagaimana pengaruh resolusi frekuensi terhadap analisa deteksi eksentrisitas celah udara.
1.3 Tujuan Penelitian
4
1.4 Batasan Masalah
Batasan masalah pada penelitian ini adalah percobaan dilakukan pada motor induksi tiga fasa, kasus yang diteliti adalah eksentrisitas celah udara, toleransi tegangan tidak seimbang kurang dari -5% dan +10% dari tegangan sumber, eksentrisitas celah udara yang digunakan adalah tipe statis, metoda analisa menggunakan algoritma FFT.
1.5 Kontribusi
Dengan adanya sistem deteksi kerusakan pada motor ini khususnya pada kasus eksentrisitas celah udara maka gangguan eksentrisitas celah udara pada motor induksi dapat dideteksi lebih dini sehingga motor terhindari dari kerusakan serius pada komponen lainnya.
1.6 Metodologi Penelitian
Metode penelitian yang digunakan dalam penelitian ini adalah sebagai berikut:
1. Studi Literatur
Melakukan pengumpulan literatur yang dibutuhkan untuk pengerjaan dan penelitian penelitian yang terkait dengan sistem deteksi eksentrisitas celah udara. Literatur yang digunakan meliputi jurnal, proceeding, dan text book.
2. Perancangan Sistem
Perancangan sistem melibatkan beberapa eksperimen seperti melakukan rekonstruksi celah udara dengan tingkat kecacatan, perencanaan pembebanan yang akan digunakan, perancangan sistem pengukuran, dan pengolahan sinyal arus stator.
3. Pengujian Sistem
5 4. Analisis Data
Analisa data dilakukan untuk mengidentifikasi hasil pengujian yang telah dilakukan. Analisa sinyal arus stator dilakukan dengan panjang data yang yang telah ditentukan untuk tingkatan frekuensi resolusi, eksentrisitas celah udara yang berbeda dan kondisi pembebanan yang juga bervariasi akan dianalisis.
5. Penulisan Laporan Penelitian
6
7
BAB 2
KAJIAN PUSTAKA
2.1 Motor Induksi
Motor induksi adalah motor yang arus medannya berasal dari induksi elektromagnetik, yang mana induksi elektromagnetik tersebut dihasilkan oleh sumber 3 fasa yang dihubungkan pada kumparan stator, sehingga tidak memerlukan sumber DC untuk bisa menjalankan motor. Motor ini bekerja pada kecepatan konstan dari nol sampai beban penuh. Kecepatannya sangat tergantung pada frekuensi sehingga motor ini mudah untuk dikemudikan secara elektris [1].
2.1.1 Kontruksi motor induksi
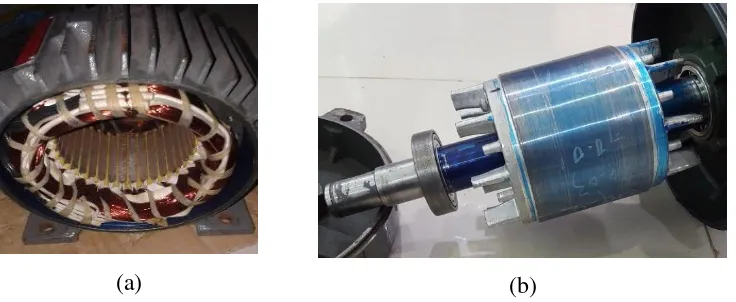
Terdapat dua komponen utama dalam motor induksi yaitu bagian yang didalam yang disebut rotor dan bagian luar yang disebut stator seperti yang ditunjukkan pada gambar 2.1. Antara rotor dan stator dipisahkan oleh celah udara yang dibuat seminimum mungkin untuk mengoptimalkan kerja dari motor induksi, besarnya celah udara bergantung pada daya keluaran motor [2].
Stator merupakan bagian yang diam dan mempunyai kumparan yang dapat menginduksikan medan elektromagnetik kepada kumparan rotornya. Stator terbuat dari rangka baja yang berlubang dan pada inti stator dibuat berlaminasi dan juga terdapat beberapa slot yang digunakan sebagai tempat belitan. Belitan stator tediri atas belitan belitan yang terbagi tiga secara seimbang yang terdistribusi dalam slot stator dan dihubungkan dengan sumber tegangan. Energi untuk rotor dihantarkan secara induksi oleh rotasi sinkron dari medan magnetik stator. Stator yang digunakan pada penelitian ini ditunjukkan pada gambar 2.1 (a).
8
karena kontruksi yang sederhana dan kuat, rotor jenis ini dibuat dari baja silikon dan terdiri dari inti yang berbentuk silinder yang sejajar dengan slot rotor dan diisi konduktor berbentuk batangan yang terbuat dari dengan tembaga atau alumunium.
(a) (b)
Gambar 2.1. Komponen motor induksi, (a) stator, (b) rotor.
Diantara stator dan rotor terdapat celah udara yang merupakan ruangan antara stator dan rotor. Pada celah udara ini lewat fluks induksi stator yang memotong kumparan rotor sehingga meyebabkan rotor berputar. Celah udara yang terdapat antara stator dan rotor diatur sedemikian rupa sehingga didapatkan hasil kerja motor yang optimum. Bila celah udara antara stator dan rotor terlalu besar akan mengakibatkan efisiensi motor induksi rendah, sebaliknya bila jarak antara celah terlalu kecil atau sempit akan menimbulkan kesukaran mekanis pada mesin.
2.1.2 Prinsip kerja motor induksi
9
Perbedaan putaran relatif antara stator dan rotor disebut slip. Bertambahnya beban akan memperbesar torsi motor, sehingga slip antara medan putar stator dan putaran rotor pun akan bertambah besar. Jadi, bila beban motor bertambah, putaran rotor cenderung menurun. Secara matematis medan putar stator, kecepatan putaran rotor, dan slip dapat dilihat pada persamaan (2.1) sampai (2.3).
Kecepatan dari medan putar disebut kecepatan sinkron. Untuk motor induksi dengan p kutub, kecepatan sinkron dalam rpm adalah:
(2.1)
dimana fs adalah frekuensi stator dalam hz, n adalah kecepatan sinkron. Karena rotor berputar pada kecepatan asinkron yang biasanya lebih lambat dari kecepatan sinkron.
(2.2)
Perbedaan kecepatan disebut dengan kecepatan slip. Kecepatan slip dapat ditulis sebagai s yaitu slip per unit:
(2.3)
Kecepatan sinkron tergantung pada frekuensi dari tegangan sumber dan jumlah kutub. Kecepatan asinkron atau kecepatan rotor tidak hanya tergantung pada frekuensi dan jumlah kutub tetapi juga terpengaruh pada torsi beban motor. Semakin tinggi torsi beban maka slip menjadi lebih tinggi dan kecepatan rotor menjadi lebih lambat.
Frekuensi rotor tidak persis sama seperti frekensi stator. Jika rotor motor terkunci sehingga tidak dapat bergerak nr = 0 rpm, maka rotor akan mempunyai frekuensi yang sama seperti stator fr = fs, dimana pada kondisi ini slip s = 1. Akan tetapi, jika rotor berputar pada kecepatan (mendekati) sinkron ns ≈ nr maka frekuensi rotor akan menjadi (mendekati) nol fr ≈ 0, dimana pada kondisi ini slip s = 0. Persamaan frekuensi rotor pada motor induksi 3 fasa sebagai berikut :
( ) (2.4)
10
2.2 Eksentrisitas Celah Udara
Eksentrisitas celah udara merupakan kondisi lebar celah udara pada motor induksi tidak memiliki lebar yang sama. Terdapat dua tipe eksentrisitas celah udara pada motor yaitu statis dan dinamis. Pada eksentrisitas celah udara statis posisi dari panjang radial minimum dari celah udara tetap pada jarak tertentu. Jika terus dibiarkan eksentrisitas statis dapat menyebabkan eksentrisitas dinamis di mana pusat rotor tidak di pusat rotasi, dan posisi minimum celah udara berputar dengan rotor.
(a) (b) (c)
Gambar 2.2. (a) Motor normal, (b) Eksentrisitas statis, (c) Eksentrisitas dinamis
Eksentrisitas statis dapat disebabkan oleh keovalan dari inti stator atau posisi yang tidak benar dari rotor dan stator saat komisioning. Dengan asumsi bahwa rotor sangat padat sehingga level eksentrisitas statik tidak berubah. Eksentrisitas dinamik dapat diakibatkan beberapa faktor. Misalnya toleransi pabrik, pemasangan bantalan, ketidak selarasan poros, resonansi mekanik pada kecepatan kritis dan komponen yang tidak baik saat produksi. Eksentrisitas celah udara menginduksi stator harmonisa arus pada spesifik frekuensi tinggi dan rendah [15]. Frekuensi harmonisa akibat eksentrisitas dapat dihitung menurut persama:
( ) (2.6)
11
Meskipun demikian hanya kombinasi jumlah pasang kutub dan jumlah slot rotor yang akan memberi kenaikan pada komponen eksentrisitas statis atau dinamik [5]. Hubungannya untuk mesin tiga fasa adalah:
R=2p [3 (k q) r] k (2.7)
Dimana, (k q)=,1,2,3 dan r = 0, k=1
Selanjutnya, jika kedua eksentrisitas statis dan dinamis terjadi bersama-sama, terjadi di sebagian besar kegagalan celah udara, maka akan timbul komponen frekuensi rendah didekat frekuensi dasar, yang dapat dinyatakan dengan: beban dapat menghasilkan harmonisa arus yang mirip dengan perhitungan diatas, sehingga diasumsikan beban adalah konstan. Ditemukan bahwa magnitud dari komponen frekuensi karena perubahan beban selalu lebih besar dari harmonisa eksentrisitas.
2.2.1 Eksentrisitas akibat kecacatan stator
12
magnetik dalam inti stator. Karena pada motor induksi celah udara sangat kecil maka motor induksi sangat sensitif terhadap perubahadan lebar celah udara [15].
Berdasarkan dari terjadinya eksentrisitas celah udara yang mengakibatkan tidak seimbangnya daya tarik magnetik antara rotor dan stator maka eksentrisitas celah udara statis dibedakan menjadi dua yaitu eksentrisitas celah udara berupa gerakan putar silinder pada rotor (Cylindical whirling motion) dan eksentrisitas celah udara yang berupa gerakan putar kerucut simetris pada rotor (Symetrical conical whirling motion). Pada kasus eksentrisitas celah udara yang diakibatkan oleh inti stator yang oval akan terjadi gerakan eksentrisitas berupa gerakan putar silinder (Cylindical whirling motion) yang artinya ada bagian dimana celah udara pada bagian stator yang oval memiliki daya tarik magnetik yang berbeda namun rotor tetap selaras dengan inti stator. Gambaran dari eksentrisitas statis pada celah udara yang berupa gerakan putar rotor silinder dapat dilihat pada gambar 2.3.
Gambar 2.3 Eksentrisitas tipe cylindical whirling motion
Pada penelitian ini eksentrisitas celah udara dilakukan dengan membuat rekontruksi yang menghasilkan eksentrisitas celah udara tipe cylindical whirling motion. Eksentrisitas celah udara diasumsikan karena stator yang oval.
2.2.2 Eksentrisitas akibat kerusakan bearing
13
Ketidaksejajaran posisi rotor yang paling sering terjadi adalah karena kemiringan outer race dan inner race [14].
Gambar 2.4 Kesalahan instalasi bearing
Kesalahan isntalasi bearing yang mengakibatkan posisi rotor tidak selaras biasanya menjadikannya eksentrisitas celah udara statis, yang berupa gerakan putar rotor kerucut simetrik. Dimana pada kasus ini terjadi eksentrisitas celah udara namun posisi rotor dan stator juga tidak selaras. Gambaran tentang eksentrisitas yang berupa gerakan putar rotor kerucut simetrik dapat kita lihat digambar 2.5 berikut:
Gambar 2.5. Eksentrisitas celah udara tipe Symetrical conical whirling motion
Hal ini menyebabkan kerapatan fluks pada celah udara menjadi tidak simetri dan mempengaruhi induktansi di stator sehingga arus stator motor induksi mengandung harmonisa dengan frekuensi kerusakan yang dapat diprediksi dengan persamaan (2.9)[17].
(2.9)
Dimana:
fbng = Frekuensi prediksi kerusakan bearing
fe = Frekuensi sumber listrik (50 atau 60 Hz) m = Konstanta (1, 2, 3, . . .)
fv = Frekuensi kerusakan bearing
(a) (b)
14
Konstruksi bearing dapat dilihat pada Gambar 2.6.
Gambar 2.6. Konstruksi bearing motor induksi
Dimana NB adalah jumlah bola, frm adalah Frekuensi Kecepatan Putaran Rotor, DB adalah diameter bola, DP adalah diameter antar bola, adalah sudut kontak bola (Diasumsikan 00).
Kerusakan outer pada bearing dapat menyebabakan eksentrisitas statis,karena outer ring tidak berputar dengan rotor, maka kerusakan eksentrisitas statis sama dengan kerusakan outer ring [8]. Seperti terlihat pada gambar 2.7.
Gambar 2.7 Eksentrisitas akibat kerusakan outer ring [8].
Kerusakan inner berbeda dengan kerusakan outer, pada kerusakan inner ring rotor ikut berputar dengan inner ring sehingga terjadi kasus eksentrisitas
dinamis. Seperti terlihat pada gambar 2.8.
15
2.3 Hubungan Kerusakan Komponen dengan Celah Udara Motor Induksi
Kerusakan mekanik pada motor induksi menghasilkan variasi panjang celah udara yang menyebabkan perubahan medan magnet, dan akhirnya mempengaruhi arus pada stator. Langkah pertama analisis secara teori adalah menentukan pengaruh panjang celah udara g sebagai fungsi waktu dan posisi angular θ dengan referensi frame stator.
2.3.1 Pengaruh kerusakan outer bearing terhadap celah udara
Ketika tidak ada kontak antara bola dan daerah yang rusak, rotor adalah sangat center. Dalam hal ini panjang celah udara g memiliki nilai yang konstan g, dengan mengabaikan efek slotting rotor dan stator. Sebaliknya bila ada kontak antara bola dan daerah yang rusak setiap:
(2.10)
Nilai k integer, kontak antara bola dengan daerah yang rusak menghasilkan gerakan kecil rotor terhadap frame stator. Dalam hal ini panjang celah udara didekati dengan g0(1-e0cosθ), dimana e adalah tingkat relatif eksentrisitas. Pemikiran ini menghasilkan persamaan untuk panjang celah udara:
( )
2.3.2 Pengaruh kerusakan inner bearing terhadap celah udara
Dalam kasus ini situasinya berbeda dengan kerusakan outer raceway. Kerusakan terjadi pada inner race posisi angular untuk minimum celah udara bergerak terhadap frame stator mengikuti putaran rotor pada frekuensi ωr. Antara
kedua kontak tersebut, kerusakan pindah dengan sudut:
16
dimana ei adalah tingkat relatif eksentrisitas karena kerusakan inner bearing. Sehingga panjang celah udara menjadi :
( )
Airgap permeance Λ adalah proporsional dengan inverse panjang celah
udara g seperti persamaan berikut:
g
Untuk menyederhanakan persamaan, fungsi dirac ditulis sebagai fungsi Fourier Series:
Sehingga persamaan airgap permeance dapat ditulis menjadi:
didefinisikan sebagai 0 (outer bearing),
c(inner bearing)2.5 Kerapatan Fluks Celah Udara
Kerapatan fluks pada celah udara adalah perkalian antara MMF dengan gelombang permeance. MMF Fr didapat dengan kombinasi dasar rotor dan stator diasumsikan sebagai:
,
r r
17
perkalian antara persamaan 2.18 dengan 2.19 menghasilkan persamaan distribusi kerapatan fluks:
Pengaruh dari eksentrisitas rotor disebabkan oleh kerusakan bearing pada kerapatan fluks. Sebagai penambah dalam gelombang sinusoidal yang fundamental (Bo), sehingga gelombang sinus yang tertumpuk terlihat di celah udara. Gelombang tambahan ini memeiliki p±1pasang kutub dan frekuensinya adalah:
2.6 Hubungan Eksentrisitas Celah Udara dengan Arus Stator
Penambahan komponen kerapatan fluks sesuai persamaan 2.20 ekuivalen dengan penambahan fluks magnetik φ(θ,t). Dengan memperhatikan realisasi dari belitan geometri mesin tambahan fluks pada masing-masing fasa dapat didapatkan. Dengan imposisi tegangan stator perubahan fluks terhadap waktu menyebabkan penambahan arus stator sesuai persamaan tegangan:
m
Frekuensi dari fluks pada masing-masing fasa adalah sama dengan frekuensi yang terdapat pada airgap sesuai persamaan 2.30. Arus stator pada masing-masing fasa diberikan oleh turunan dari fluks sehingga persamaan Im(t) adalah :
18
2.7 Proses Pengolah Sinyal
FFT merupakan suatu metode perhitungan cepat dari Discrete Fourier Transform (DFT) atau dengan kata lain FFT merupakan pengembangan dari DFT.
DFT merupakan suatu metode perhitungan yang mengubah sinyal dari domain waktu ke domain frekuensi. Biasanya FFT digunakan untuk keperluan analisis spektrum dalam domain frekuensi. Dengan menggunakan FFT, suatu sinyal dapat dilihat sebagai objek dalam domain frekuensi. FFT lebih cocok digunakan pada sinyal diskrit yang periodik dan simetri. Sinyal diskrit yang periodik dan simetri adalah sinyal diskrit yang terus berulang pada rentang waktu tertentu dan memiliki pencerminan disekitar titik tengahnya.
Secara matematis, FFT dari suatu sinyal diskrit x[n] dengan menggunakan N titik dapat dilihat pada persamaan (2.14) dan (2.15) [20].
1
Secara numeris beban komputasi DFT cukup berat karena memerlukan sejumlah N2 perkalian kompleks. Sedangkan FFT memiliki beban komputasi yang lebih ringan dengan hanya memerlukan sejumlah log2 10 N perkalian kompleks. FFT dengan beban komputasi tersebut adalah untuk FFT jenis radix-2 [20].
19
(2.16)
Dimana:
20
21
BAB 3
METODOLOGI PENELITIAN
3.1 Diagram Alir Penelitian
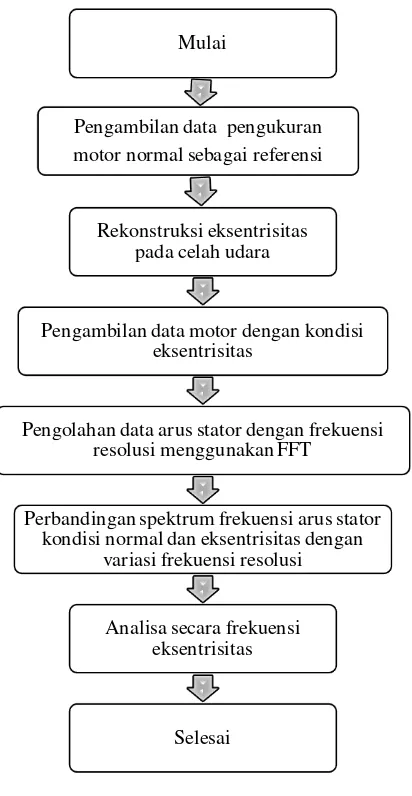
Pada penelitian ini akan dilakukan eksperimen untuk mendeteksi terjadinya eksentrisitas celah udara pada motor induksi melalui analisa frekuensi tinggi pada arus stator. Adapaun beberapa peralatan yang dibutuhkan dalam penelitian ini seperti sumber tegangan AC, motor induksi 3 fasa, perangkat pembebanan, dan peralatan akuisisi data yang secara langsung terhubung ke komputer. Berikut merupakan diagram alir pada ekseperimen ini :
Gambar 3.1 Diagram alir percobaan
Mulai
Pengambilan data pengukuran motor normal sebagai referensi
Rekonstruksi eksentrisitas pada celah udara
Pengambilan data motor dengan kondisi eksentrisitas
Pengolahan data arus stator dengan frekuensi resolusi menggunakan FFT
Perbandingan spektrum frekuensi arus stator kondisi normal dan eksentrisitas dengan
variasi frekuensi resolusi
Analisa secara frekuensi eksentrisitas
22
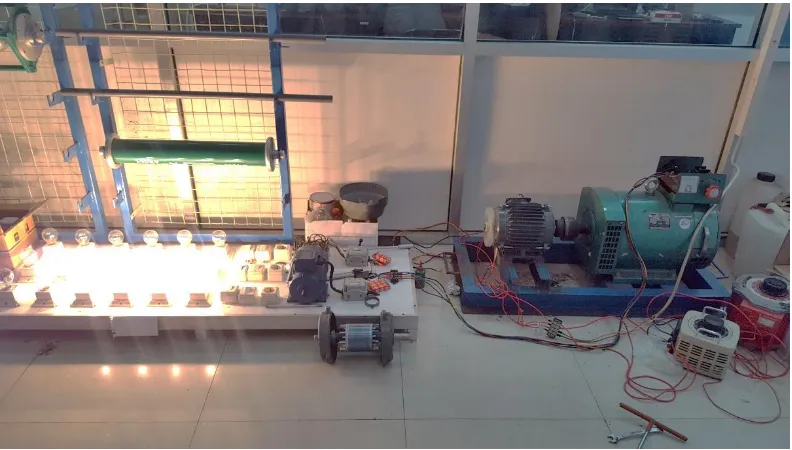
Pada eksperimen ini sumber tegangan AC difungsikan sebagai sumber listrik arus bolak-balik untuk mengoperasikan motor induksi 3 fasa dengan kapasistas sebesar 2 HP atau setara dengan 1,5 KW. Sistem pengukuran dilakukan dengan memberikan pembebanan mekanik dan elektrik kepada motor induksi. Pembebanan dilakukan dengan cara motor dikopel dengan generator yang telah dibebani oleh lampu.
Beberapa alat penunjang pada pengukuran arus yaitu, komputer dengan perangkat lunak LabView, DIAdem, dan NI DAQ-9246 sebagai akuisisi data. Perangkat lunak Labview terintegrasi dengan NI DAQ-9246 untuk mempermudah dalam pemilihan frekuensi sampling. Hasil dari pengukuran akan diolah dengan metode pengolah Fast Fourier Transform dengan menggunakan perangkat lunak DIAdem atau MATLAB. Konfigurasi sistem pada penelitian ini seperti yang terlihat pada gambar 3.2 dibawah ini.
Generator
Gambar 3.2 Konfigurasi sistem deteksi eksentrisitas celah udara
23 Gambar 3.3 Motor Induksi 3 Fasa
Tabel 3.1 Spesifikasi Motor Induksi 3 Fasa
Merk TATUNG
24 Gambar 3.4 Perangkat pembebanan berupa lampu
Gambar 3.5 Generator sinkron
25
Data motor pertama yang diambil untuk setiap kondisi kerusakan rotor adalah dalam kondisi tanpa beban. Setelah data tanpa beban didapat, motor akan diturunkan dari dudukannya untuk dipasang kopel pada rotornya, lalu motor dinaikkan kembali ke dudukannya dan disambung oleh kopel pada rotor generator, lalu pengambilan data kembali dilanjutkan untuk data beban generator yang terhubung juga dengan beban lampu.
3.3 Proses Akuisisi Data
Peralatan akuisisi data dalam penelitian adalah NI DAQ-9246 dengan sensor arus yang digunakan sebagai media yang mengubah sinyal arus stator menjadi sekumpulan data secara digital dan melakukan akuisisi data untuk keperluan analisis. Alat ini merupakan produk dari National Instruments yang dapat difungsikan sebagai osiloskop dengan frekuensi sampling hingga 1 MHz. Alat ini terintegrasi dengan perangkat lunak LabVIEW yang juga merupakan produk dari National Instruments. Channel Analog to Digital Converter (ADC) pada NI cDAQ-9246 digunakan untuk membaca sinyal arus stator. Sinyal arus stator yang dibaca oleh NI DAQ-9246 kemudian diakuisisi, sedangkan perangkat lunak LabVIEW berfungsi untuk menampilkan dan mengkonversi data sinyal arus stator yang telah diakuisisi. Tampilan peralatan akuisisi data dapat dilihat pada Gambar 3.6.
26
Pengaturan dari proses sampling pada DAQ dilakukan melalui perangkat lunak LabVIEW. Keluaran dari hasil sampling oleh DAQ melalui LabVIEW adalah berupa file TDMS (Technical Data Management Streaming). Untuk dapat melihat sinyal hasil sampling melalui file TDMS tersebut, dibutuhkan lagi satu perangkat lunak yakni DIAdem. Melalui perangkat lunak DIAdem, sinyal hasil proses sampling dapat diatur tampilannya. Selain itu, DIAdem juga dapat digunakan untuk mengubah file TDMS tadi ke bentuk file .xls. File .xls hasil konversi oleh DIAdem berisi data teknis melalui proses sampling dan juga data arus ketiga fasa. File .xls inilah yang akan digunakan sebagai input pada perangkat lunak MATLAB untuk bisa dilakukan proses analisa atau bisa juga dilakukan analisa langsung dalam perangkat lunak DIAdem.
Dari beberapa peralatan penunjang yang sudah dijelaskan sebelumnya, peralatan tersebut disusun sedemikian rupa sehingga dapat dibentuk sistem deteksi terjadinya eksentrisitas celah udara yang implementasinya dapat dilihat pada Gambar 3.7.
27
Setelah perancangan sistem deteksi kerusakan bearing sudah dilakukan, maka langkah-langkah untuk melakukan pengujian adalah sebagai berikut:
1. Susun peralatan penunjang seperti pada Gambar 3.7.
2. Kondisikan semua peralatan penunjang berada dalam keadaan aktif atau terhubung ke sumber.
3. Nyalakan motor induksi hingga mencapai kondisi steady state
4. Ukur arus stator menggunakan peralatan akuisisi data yang terintegrasi dengan perangkat lunak LabVIEW.
5. Ulangi langkah 1 sampai 4 dengan kondisi tanpa beban dan kondisi berbeban pada motor normal dalam bentuk persen secara bertahap 0%, 25%, 50%, 75% dan 100%.
6. Ulangi langkah 1 sampai 5 dengan kondisi tanpa beban dan kondisi berbeban pada motor telah mengalami eksentrisitas dalam bentuk persen secara bertahap 0%, 25%, 50%, 75% dan 100%.
7. Ulangi langkah 1 sampai 5 dengan kondisi tanpa beban dan kondisi berbeban dengan variasi frekuensi resolusi 2 hz, 1 hz, 0,5 hz, 0,1 hz dan 0,02 hz.
8. Setelah memperoleh semua data hasil pengukuran yang diperlukan, analisis masing-masing data untuk mendeteksi terjadinya eksentristas celah udara pada motor induksi.
28
3.4 Rekontruksi Eksentrisitas Celah Udara
Simulasi terjadinya eksentrisitas dilakukan dengan mengubah ukuran bearing dengan ukuran yang lebih kecil. Bearing ukuran yang digunakan pada
motor induksi dalam penelitian ini menggunakan bearing dengan diameter luar 52 mm dan diameter dalam 25 mm. Dimensi bearing normal yang tidak mengakibatkan terjadinya eksentrisitas celah udara dapat dilihat pada gambar 3.8.
25 52.0
12.0
Gambar 3.8. Bearing normal tanpa rekontruksi outer 52 mm dan inner 25 mm
Untuk menjadikan rotor tidak selaras terhadap celah udara maka bearing diganti dengan ukuran yang lebih kecil yaitu dengan ukuran diameter luar 47 mm dan untuk diameter dalam tetap dengan ukuran 25 mm. selanjutnya agar bearing yang lebih presisi dipasang pada rumahan bearing yang semula dan juga untuk membuat menjadi tidak selaras maka dibuat ring bearing dengan diameter luar 52 mm dan diameter dalam 47 mm yang nantinya ring ini digunakan untuk melapisi bearing pengganti yang lebih kecil sehingga ukurannya sama dengan ukuran
bearing yang semula. Untuk membuat poros rotor tidak simetris atau eksentrisitas
29 Gambar 3.9. Ring dengan ketebalan berbeda 0.1 mm
47.0
2,6
2,4 52.0
12.0
Gambar 3.10. Ring dengan ketebalan berbeda 0.2 mm
Rekontruksi poros rotor agar bergeser 0.1 mm maka ring dibuat dengan tebal bagian atas sebesar 2,6 mm dan bagian bawah sebesar 2,4 mm. Ring ini digunakan pada bagian depan dan bagian belakang rumah stator secara sejajar. Poros rotor bergeser kebawah sebanyak 0,1 mm dan menjadikan lebar celah udara bagian atas bertambah menjadi 0,3 mm dan bagian bawah berkurang yang semula 0,2 mm menjadi 0,1 mm. Pada gambar 3.10 sama halnya dengan gambar 3.9 namun pada gambar 3.10 ring dibuat dengan ketebalan atas 2,7 mm dan bagian bawah 2,3 mm sehingga poros bergeser 0,2 mm yang juga membuat lebar celah udara menjadi tidak seimbang.
Eksperimen eksentrisitas celah udara dilakukan dengan menggunakan dua variasi percobaan yaitu dengan keadaan poros bergeser 0.1 mm dan 0.2 mm. Hal ini dilakukan berdasarkan hasil pengukuran lebar celah udara pada motor normal 2 HP yang digunakan dalam penelitian ini dimana motor induksi ini hanya memiliki lebar celah udara sebesar 0,25 mm setiap sisinya. Gambar 3.11 menunjukkan perbandingan ukuran bearing normal dan bearing yang lebih kecil dengan ring dengan ketebalan berbeda yang akan digunakan dalam penelitian ini.
(a) (b)
2,7
30
Gambar 3.11 a) Perbandingan ukuran bearing normal dengan bearing pengganti, b) Bearing pengganti dengan ring eksentrik
Pada penelitian ini akan menggunakan eksentrisitas celah udara statis tipe cylyndrical whirling motion. Pada eksentrisitas jenis ini motor mengalami ketidak
seimbang celah udara namun rotor dan stator tetap selaras. Oleh karena itu maka pemasangan ring bearing yang berbeda ketebalan akan dipasang selaras juga. Skema dari hasil pemasangan ring bearing yang selaras dapat terlihat pada gambar 3.12 berikut.
0,1
0,3
0,1
Gambar 3.12 Skema eksentrisitas celah udara
3.5 Perancangan Sistem Pengukuran dan Pengolahan Data
Sistem pengukuran sinyal arus stator dilakukan melalui perangkat lunak LabVIEW dimana perangkat lunak ini digunakan sebagai program utama untuk menampilkan dan memberikan perintah akuisisi data sinyal arus stator pada salah satu fasa motor induksi 3 fasa. Perangkat lunak LabVIEW dikenal dengan sebutan VI atau Virtual Instruments karena tampilan dan sistem operasinya dapat meniru sebuah perlatan instrumentasi.
Ada dua komponen penting dalam perangkat lunak LabVIEW, yaitu front panel dan block diagram. Front panel adalah bagian window yang
merupakan tampilan utama dari perangkat lunak LabVIEW. Front panel digunakan untuk membangun sebuah VI, menjalankan program dan mendebug program. Diagram blok adalah bagian window yang berisi source code yang menggunakan fungsi representasi grafis untuk mengontrol objek dari front panel.
31
32
33
BAB 4
HASIL PENGUJIAN DAN ANALISA DATA
Pada bab ini menjelaskan terkait hasil pengujian sistem yang telah dilakukan untuk selanjutnya dipaparkan analisis mengenai eksentrisitas celah udara melalui frekuensi resolusi pada arus stator. Pengujian dilakukan dengan membandingkan hasil analisa spektrum frekuensi pada motor normal dengan motor kondisi eksentrisitas celah udara. Kondisi eksentrisitas celah udara dibuat dengan dua tingkat kerusakan, yaitu eksentrisitas 0,1 mm dan eksentrisitas 0,2 mm. Hal ini dimaksudkan untuk mengetahui pengaruh tingkat eksentrisitas terhadap perubahan spektrum frekuensi. Untuk mendapatkan spektrum frekuensi yang bervariasi maka analisa dilakukan dengan menggunakan 5 frekuensi resolusi yang berbeda, yang ditunjukkan pada tabel 4.1. Untuk meningkatkan keakuratan proses analisa, ini juga dilakukan pada kondisi berbeban untuk mengetahui efek pembebanan terhadap hasil analisa deteksi eksentrisitas celah udara melalui frekuensi resolusi arus stator. Kondisi pembebanan dibuat menjadi 5 pembebanan yang berbeda yang dinyatakan dalam persen. Proses pengambilan data untuk analisa deteksi eksentrisitas celah udara dapat dilihat pada tabel 4.2.
34 Tabel 4.2 Skema pengambilan data
Beban Frekuensi
resolusi Kondisi motor Keterangan
0 %
Pembebanan yang digunakan merupakan pembebanan mekanik berupa generator dan untuk membuat beban bervariasi maka generator diberi pembebanan elektris berupa lampu. Untuk membuat pembebanan bertingkat menjadi bentuk persentase maka pertama yang dilakukan adalah mengukur daya tanpa beban atau pengukur arus stator dilakukan pada saat motor beroperasi tanpa terkopel dengan generator. Selanjutnya motor dikopel dengan generator dan generator dihubungkan pada beban lampu untuk variasi beban. Penambahan beban lampu dilakukan hingga motor mendapatkan beban penuh dengan acuan arus maksimum rating pada nameplate motor yaitu sebesar 3,44 Ampere yang nantinya menjadi acuan nilai untuk beban penuh pada motor. Daya lampu yang digunakan bervariasi antara 50-100 Watt. Pengukuran untuk pembebanan dilakukan dengan menggunakan peralatan penunjang berupa power quality. Tabel 4.3 merupakan hasil pengukuran persentase pembebanan yang akan digunakan pada penelitian ini:
Tabel 4.3. Perbandingan pembebanan pada motor induksi dalam persen
Beban motor
(%) Konfigurasi Pembebanan
35
4.2 Analisa Arus Stator Pada Motor Normal dan Eksentrisitas
Analisa arus stator ini dilakukan untuk melihat perubahan nilai arus akibat terjadinya eksentrisitas celah udara. Analisa arus dilakukan pada keadaan motor normal dan pada keadaan motor mengalami eksentrisitas. Kasus eksentrisitas celah udara yang diamati adalah dalam dua variasi eksentrisitas yaitu eksentrisitas dengan penggeseran poros rotor 0,1 mm dan eksentrisitas dengan pergeseran poros rotor 0,2 mm dari inti poros. Pengukuran juga dilakukan pada kondisi beban yang bervariatif. Hasil dari pengukuran dari arus pada saat motor normal dan motor mengalami eksentrisitas celah udara ditunjukkan pada tabel 4.4. Tabel 4.4 Hasil pengukuran arus stator pada kondisi normal dan eksentrisitas
Beban (%) Arus Stator (Ampere)
Kondisi Normal Eksentrisitas 0,1 mm Eksentrisitas 0,2 mm
0 1,55 1,60 1,53
25 1,75 1,72 1,78
50 2,05 2,13 2,15
75 2,53 2,49 2,42
100 3,45 3,40 3,38
36
4.3 Pengukuran Slip pada Motor Kondisi Normal dan Kondisi
Eksentrisitas
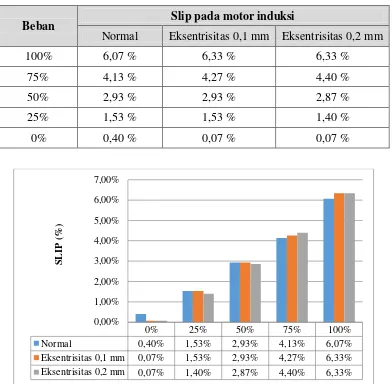
Berdasarkan persamaan (2.12) untuk menentukan frekuensi eksentrisitas celah udara disekitar fundamental pada motor induksi perlu mengetahui nilai slip. Nilai slip ini digunakan untuk mencari nilai frekuensi rotor dan kemudian dijumlahkan dengan frekuensi sumber sehingga menghasilkan spektrum frekuensi gangguan. Frekuensi gangguan adalah frekuensi yang muncul disekitaran frekuensi fundamental yang memiliki pola berbeda beda setiap tipe kerusakannya. Hasil slip dari motor normal dan motor telah mengalami eksentrisitas celah udara dengan diberikan variasi beban dapat dilihat pada tabel 4.5 dan gambar 4.1. Tabel 4.5 Hasil pengukuran slip pada motor induksi
Beban Slip pada motor induksi
Normal Eksentrisitas 0,1 mm Eksentrisitas 0,2 mm
100% 6,07 % 6,33 % 6,33 %
75% 4,13 % 4,27 % 4,40 %
50% 2,93 % 2,93 % 2,87 %
25% 1,53 % 1,53 % 1,40 %
0% 0,40 % 0,07 % 0,07 %
Gambar 4.1 Perbandingan slip motor normal dan terjadi eksentrisitas
0% 25% 50% 75% 100%
Normal 0,40% 1,53% 2,93% 4,13% 6,07%
Eksentrisitas 0,1 mm 0,07% 1,53% 2,93% 4,27% 6,33% Eksentrisitas 0,2 mm 0,07% 1,40% 2,87% 4,40% 6,33%
37
Dari gambar 4.1 dapat kita lihat adanya gangguan eksentrisitas celah udara mempengaruhi nilai slip, perubahan nilai slip pada motor kondisi eksentrisitas celah udara ini disebabkan adanya daya tarik medan elektromagnetik yang tidak seimbang dicelah udara motor sehingga gaya medan putar menjadi tidak beraturan. Dalam kasus deteksi eksentrisitas celah udara nilai slip digunakan untuk menentukan letak frekuensi eksentritas disekitar frekuensi fundamental.
4.4 Analisa Letak Frekuensi Eksentrisitas Celah Udara
Metode deteksi melalui analisa arus stator memiliki karakteristik spektrum frekuensi yang berbeda beda disetiap kerusakan motor. Dalam kasus deteksi eksentrisitas celah udara, hal yang pertama yang dilakukan adalah menentukan letak spektrum frekuensi kerusakan yang menjadi karakteristik gangguan eksentrisitas. Letak spektrum frekuensi pada gangguan eksentrisitas celah udara dapat ditentukan melaui persamaan (2.7) dan (2.9). Pada penelitian ini penentuan letak sepktrum frekuensi dilakukan dengan menggunakan persamaan (2.9), dimana letak spektrum frekuensi muncul di frekuensi rendah atau disekitar frekuensi fundamental. Pada tabel 4.6, 4.7, dan 4.8 ditunjukkan analisa perhitungan letak frekuensi eksentrisitas dengan menggunakan nilai slip yang telah diukur pada tabel 4.5.
Tabel 4.6 Letak spektrum frekuensi eksentrisitas pada kondisi normal
Beban Letak spektrum frekuensi eksentrisitas
38
Tabel 4.7 Letak spektrum frekuensi eksentrisitas pada kondisi eksentrisitas 0,1 mm
Beban Letak spektrum frekuensi eksentrisitas
fs fr fs-fr fs+fr
Tabel 4.8 Letak spektrum frekuensi eksentrisitas pada kondisi eksentrisitas 0,2 mm
Beban Letak spektrum frekuensi eksentrisitas
fs fr fs-fr fs+fr
Dari tabel diatas, dengan menggunakan frekuensi sumber 50 Hz dan nilai slip pada tabel 4.5 maka didapat frekuensi rotor berkisar 23-25 hz, selanjutnya letak frekuensi gangguan bisa ditentukan dengan menggunakan persamaan (2.9). Hasil analisa menunjukkan untuk letak frekuensi eksentrisitas pada fs-fr berkisar antara 25,02 Hz – 26,58 hz, sedangkan letak frekuensi eksentrisitas pada fs+fr berkisar antara 73,42 Hz – 74,98 Hz. Maka dapat disimpulkan bahwa dengan menggunakan analisa perhitungan, karakteristik letak spektrum frekuensi eksentrisitas berada disektirar frekuensi 25 hz dan 75 hz.
4.5 Hasil Analisa Deteksi Frekuensi Eksentrisitas Celah Udara
39
tanpa adanya frekuensi komponen lain disekitar frekuensi fundamental. Variasi frekuensi resolusi dalam percobaan deteksi eksentrisitas ini adalah frekuensi resolusi 2 Hz/sampling, 1 Hz/sampling, 0,5 Hz/sampling, 0,1 Hz/sampling, dan frekuensi resolusi 0,02 Hz/sampling. Untuk memperlengkap proses analisa maka analisa deteksi eksentrisitas juga dilakukan dengan memberikan variasi pembebanan yaitu beban 0%, 25%, 50%, 75% dan juga 100%.
Pada pengujian deteksi eksentrisitas ini, penentuan motor induksi yang terindikasi mengalami eksentrisitas celah udara adalah dengan mengamati adanya kenaikan amplitudo pada frekuensi eksentrisitras, dimana telah dilakukan analisa frekuensi eksentrisitas muncul pada frekuensi 25 hz dan 75 hz sekitar frekuensi fundamental.
4.5.1 Analisa spektrum frekuensi eksentrisitas pada beban 0%
1. Pengujian analisa arus stator dengan frekuensi resolusi 2 hz/sampling
(a)
40 (c)
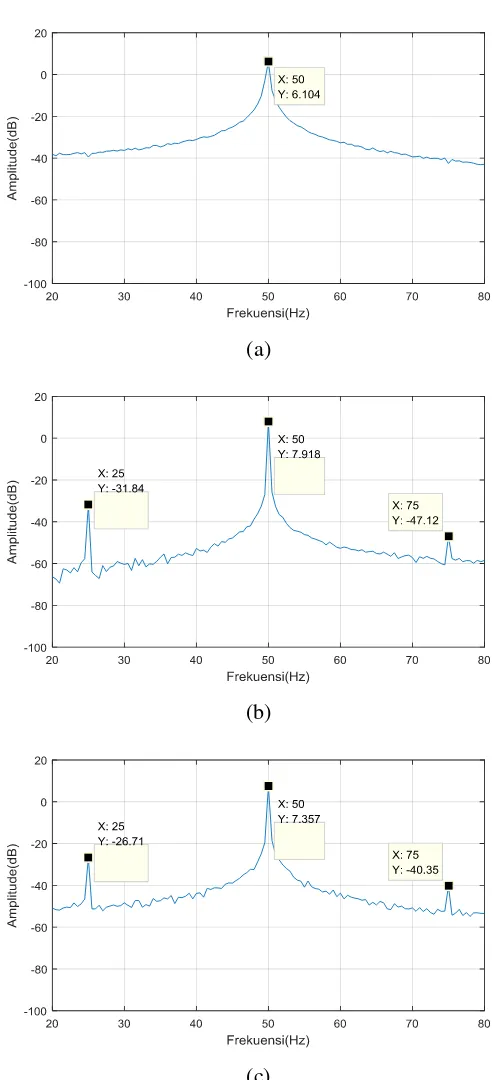
Gambar 4.2 Spektrum frekuensi pada motor dengan frekuensi resolusi 2 hz pada pembebanan 0%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm
Hasil menunjukkan terdapat perbedaan pola spektrum frekuensi pada motor kondisi normal dan kondisi eksentrisitas, pada frekuensi eksentrisitas terdapat kenaikan pola amplitudo namun tidak terlihat jelas puncak dari amplitudo pada frekuensi eksentrisitas (25 hz dan 75 hz).
2. Pengujian analisa arus stator dengan frekuensi resolusi 1 hz/sampling
41 (b)
(c)
Gambar 4.3 Spektrum frekuensi pada motor dengan frekuensi resolusi 1 hz pada pembebanan 0%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm
42
3. Pengujian analisa arus stator dengan frekuensi resolusi 0,5 hz/sampling
(a)
(b)
(c)
43
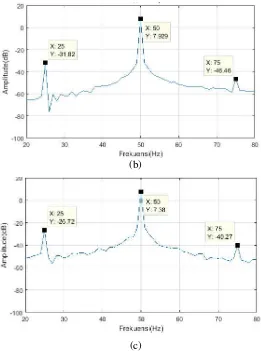
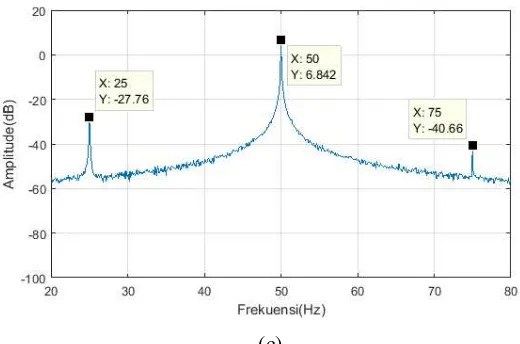
Pada hasil analisa menggunakan frekuensi resolusi 0,5 hz menunjukkan sedikit perbedaan dibanding dengan penggunaan frekuensi resolusi 1 hz, frekuensi eksentrisitas berhasil dideteksi dengan jelas pada kondisi motor yang telah direkontruksi mengalami eksentrisitas celah udara. Pada kondisi eksentrisitas 0,1 mm, kenaikan amplitudo pada frekuensi eksentrisitas sebesar 31,84 dB dan -47,12 dB, sedangkan pada kondisi eksentrisitas 0,2 mm amplitudo semakin meningkat menjadi -26,71 dB dan -40,35 dB.
4. Pengujian analisa arus stator dengan frekuensi resolusi 0,1 hz/sampling
(a)
44 (c)
Gambar 4.5 Spektrum frekuensi pada motor dengan frekuensi resolusi 0,1 hz pada pembebanan 0%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm
45
5. Pengujian analisa arus stator dengan frekuensi resolusi 0,02 hz/sampling
(a)
(b)
(c)
46
Hasil pengujian menggunakan frekuensi resolusi 0,02 hz menunjukkan analisa berhasil mendeteksi eksentrisitas celah udara, namun sama halnya dengan analisa sebelumnya pada analisa frekuensi resolusi 0,1 hz, amplitudo juga terdeteksi di frekuensi eksentrisitas pada motor kondisi normal, bahkan kenaikan amplitudo dapat terlihat dengan jelas.
4.5.2 Analisa spektrum frekuensi eksentrisitas pada beban 25%
1. Pengujian analisa arus stator dengan frekuensi resolusi 2 hz/sampling
(a)
47 (c)
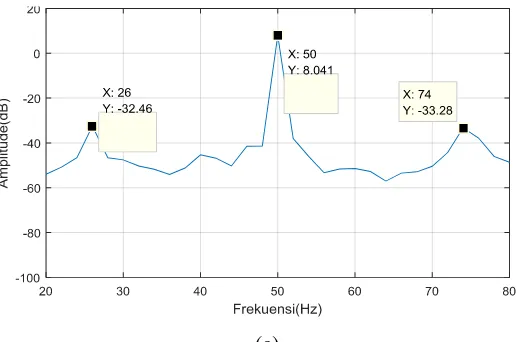
Gambar 4.7 Spektrum frekuensi pada motor dengan frekuensi resolusi 2 hz pada pembebanan 25%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm
Hasil pengujian selanjutnya dengan menggunakan pembebanan 25%, eksentrisitas celah udara berhasil terdeteksi. Gambar 4.7 menunjukkan pada kondisi normal maupun kondisi eksentrisitas terdapat puncak amplitudo yang terdeteksi di fekuensi eksentrisitas. Pada kondisi normal amplitudo muncul sebesar fs-fr -32,70 Db dan fs+fr -33,02 dB, nilai amplitudo yang hampir sama juga terdeteksi pada kondisi eksentrisitas 0,2 mm yaitu sebesar fs-fr -32,46 dB dan fs+fr -33,28 dB. Sedangkan hasil analisa dengan kondisi eksentrisitas 0,1 mm, nilai amplitudo menurun dibanding dengan kondisi normal menjadi fs-fr -48,1 dB dan fs+fr -42,05 dB.
2. Pengujian analisa arus stator dengan frekuensi resolusi 1 hz/sampling
48 (b)
(c)
Gambar 4.8 Spektrum frekuensi pada motor dengan frekuensi resolusi 1 hz pada pembebanan 25%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm
Pada gambar 4.8 dengan menggunakan frekuensi 1 hz menunjukkan bahwa eksentrisitas dapat terdeteksi. Pada pengujian eksentrisitas 0,1 mm, analisa menunjukkan muncul amplitudo pada frekuensi eksentrisitas sebesar fs-fr -48,8 dB dan fs+fr -41,75 dB. Terjadi kenaikan nilai amplitudo dengan memberikan tingkat eksentrisitas yang lebih besar, kondisi eksentrisitas 0,2 mm nilai amplitudo meningkat menjadi fs-fr -34,10 dB dan fs+fr -32,93 dB. Namun sama halnya dengan analisa sebelumnya pada gambar 4.7, pada kondisi normal menunjukkan nilai amplitudo juga terdeteksi dengan jelas pada frekuensi eksentrisitas sebesar fs-fr -32,81 dB dan fs+fr -32,32 dB. Pada kasus ini dapat kita lihat pada kondisi
49
3. Pengujian analisa arus stator dengan frekuensi resolusi 0,5 hz/sampling
(a)
(b)
(c)
50
Hasil analisa menggunakan frekuensi resolusi 0,5 hz dengan beban 25% berhasil mendeteksi eksentrisitas celah udara, hal ini ditunjukkan dengan adnaya amplitudo yang muncul pada frekuensi eksentrisitas. Pada gambar 4.9 hasil analisa menunjukkan pada kondisi normal amplitudo pada frekuensi eksentrisitas terdeteksi sebesar fs-fr -31,69 dB dan fs+fr -33,25 dB, kondisi eksentrisitas 0,1 mm terdeteksi amplitudo sebesar fs-fr -52,33 dB dan fs+fr -39,84 dB, kondisi eksentrisitas 0,2 mm terdeteksi amplitudo sebesar fs-fr -32,40 dB dan fs+fr -31,95 dB.
4. Pengujian analisa arus stator dengan frekuensi resolusi 0,1 hz/sampling
(a)
51 (c)
Gambar 4.10 Spektrum frekuensi pada motor dengan frekuensi resolusi 0,1 hz pada pembebanan 25%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm
Hasil analisa menggunakan frekuensi resolusi 0,1 hz dengan beban 25% berhasil mendeteksi eksentrisitas celah udara, hal ini ditunjukkan dengan adnaya amplitudo yang muncul pada frekuensi eksentrisitas. Hasil analisa menunjukkan pada kondisi normal amplitudo pada frekuensi eksentrisitas terdeteksi sebesar fs-fr -31,77 dB dan fs+fs-fr -32,00 dB, kondisi eksentrisitas 0,1 mm terdeteksi amplitudo sebesar fs-fr -47,66 dB dan fs+fr -40,16 dB, kondisi eksentrisitas 0,2 mm terdeteksi amplitudo sebesar fs-fr -32,38 dB dan fs+fr -32,25 dB.
5. Pengujian analisa arus stator dengan frekuensi resolusi 0,02 hz/sampling
52 (b)
(c)
Gambar 4.11 Spektrum frekuensi pada motor dengan frekuensi resolusi 0,02 hz pada pembebanan 25%, (a) kondisi normal, (b) kondisi eksentrisitas 0,1 mm, (c) kondisi eksentrisitas 0,2 mm
Hasil analisa menggunakan frekuensi resolusi 0,1 hz dengan beban 25% berhasil mendeteksi eksentrisitas celah udara. Pada kondisi normal amplitudo pada frekuensi eksentrisitas terdeteksi sebesar fs-fr -31,77 dB dan fs+fr -32,00 dB, kondisi eksentrisitas 0,1 mm terdeteksi amplitudo sebesar fs-fr -47,66 dB dan fs+fr 40,16 dB, kondisi eksentrisitas 0,2 mm terdeteksi amplitudo sebesar fsfr -32,38 dB dan fs+fr -32,25 dB.
53
generator. Karena celah udara pada motor induksi yang digunakan dalam pengujian ini sangat kecil, maka perlu dilakukan pengkopelan yang sangat sempurna. Pada kasus ini, dudukan generator dan motor dan juga permukaan kopel yang tidak benar benar presisi menyebabkan kemungkinan terjadinya pembengkokan poros rotor pada motor induksi. Hal ini menyebakan terdeteksinya eksentrisitas celah udara meskipun motor dalam kondisi normal.
54
4.5.3 Analisa spektrum frekuensi eksentrisitas pada beban 50%
1. Pengujian analisa arus stator dengan frekuensi resolusi 2 hz/sampling
(a)
(b)
(c)
55
2. Pengujian analisa arus stator dengan frekuensi resolusi 1 hz/sampling
(a)
(b)
(c)
56
3. Pengujian analisa arus stator dengan frekuensi resolusi 0,5 hz/sampling
(a)
(b)
(c)
57
4. Pengujian analisa arus stator dengan frekuensi resolusi 0,1 hz/sampling
(a)
(b)
(c)
58
5. Pengujian analisa arus stator dengan frekuensi resolusi 0,02 hz/sampling
(a)
(b)
(c)
59
4.5.4 Analisa spektrum frekuensi eksentrisitas pada beban 75%
1. Pengujian analisa arus stator dengan frekuensi resolusi 2 hz/sampling
(a)
(b)
(c)
60
2. Pengujian analisa arus stator dengan frekuensi resolusi 1 hz/sampling
(a)
(b)
(c)
61
3. Pengujian analisa arus stator dengan frekuensi resolusi 0,5 hz/sampling
(a)
(b)
(c)
62
4. Pengujian analisa arus stator dengan frekuensi resolusi 0,1 hz/sampling
(a)
(b)
(c)
63
5. Pengujian analisa arus stator dengan frekuensi resolusi 0,02 hz/sampling
(a)
(b)
(c)
64
4.5.5 Analisa spektrum frekuensi eksentrisitas pada beban 100%
1. Pengujian analisa arus stator dengan frekuensi resolusi 2 hz/sampling
(a)
(b)
(c)
65
2. Pengujian analisa arus stator dengan frekuensi resolusi 1 hz/sampling
(a)
(b)
(c)
66
3. Pengujian analisa arus stator dengan frekuensi resolusi 0,5 hz/sampling
(a)
(b)
(c)
67
4. Pengujian analisa arus stator dengan frekuensi resolusi 0,1 hz/sampling
(a)
(b)
(c)
68
5. Pengujian analisa arus stator dengan frekuensi resolusi 0,02 hz/sampling
(a)
(b)
(c)
69
Hasil analisa deteksi eksentrisitas celah udara pada motor induksi melalui analisa frekuensi resolusi arus stator, dalam keadaan berbeban dan tidak berbeban, dengan pengujian dilakukan terhadap variasi resolusi frekuensi ditunjukkan pada tabel 4.9.
Table 4.9 Perbandingan nilai amplitudo pada tiap pengujian
Beban