commit to user
i
RANCANG BANGUN SENSOR MAGNETIK
BERDASARKAN METODE INDUKSI SEBAGAI TESLAMETER
Disusun Oleh :
YOVITA LISNASARI
M0206078
SKRIPSI
Diajukan untuk memenuhi sebagian
persyaratan mendapatkan gelar Sarjana Sains Fisika
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SEBELAS MARET
SURAKARTA
commit to user
ii
LEMBAR PENGESAHAN
Skripsi ini dibimbing oleh : Pembimbing I
Drs. Suharyana, M.Sc NIP. 19611217 198903 1 003
Pembimbing II
Dr. Eng. Budi Purnama, M.Si NIP. 19731109 200003 1 001
Dipertahankan di depan Tim Penguji Skripsi pada : Hari : Senin
Tanggal : 4 Oktober 2010
Anggota Tim Penguji :
1. Sorja Koesuma, S.Si, M.Si (...) NIP. 19720801 200003 1 001
2. Dr. Yofentina Iriani, S.Si, M.Si, NIP. 19711227 199702 2 001
(...)
Disahkan oleh Jurusan Fisika
Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sebelas Maret Surakarta
Ketua Jurusan Fisika,
Drs. Harjana, M.Si, Ph.D NIP. 19590725 198601 1 001
commit to user
iii
PERNYATAAN
Dengan ini saya menyatakan bahwa skripsi saya yang berjudul “RANCANG BANGUN SENSOR MAGNETIK BERDASARKAN METODE INDUKSI SEBAGAI TESLAMETER” belum pernah diajukan untuk memperoleh gelar kesarjanaan di suatu perguruan tinggi, dan sepanjang pengetahuan saya juga belum pernah ditulis atau dipublikasikan oleh orang lain, kecuali yang secara tertulis diacu dalam naskah ini dan disebutkan dalam daftar pustaka.
Surakarta, 20 September 2010
commit to user
iv
PERNYATAAN
Sebagian dari skripsi saya yang berjudul “RANCANG BANGUN SENSOR MAGNETIK BERDASARKAN METODE INDUKSI SEBAGAI TESLAMETER” telah dipresentasikan dalam:
Seminar Nasional Fisika (SNF) Tahun 2010 oleh Jurusan Fisika Fakultas Matematika dan IPA UNNES pada tanggal 2 Oktober 2010 dengan judul “Kajian Pendahuluan Sensor Magnet dengan Kumparan Pencuplik Tunggal sebagai Alat Ukur Medan
Magnet”
Surakarta, 20 September 2010
commit to user
1 BAB I PENDAHULUAN
I.1. Latar Belakang
Kegiatan mengukur merupakan pendahuluan pembelajaran fisika yang sangat penting. Mengukur pada hakekatnya membandingkan suatu besaran yang belum diketahui nilainya dengan besaran lain yang sudah diketahui nilainya sebagai standar. Untuk keperluan tersebut diperlukan alat ukur, yaitu sebuah alat untuk menentukan nilai atau besaran dari suatu kuantitas atau variabel. Salah satu alat ukur dalam dunia fisika adalah alat ukur medan magnet yang disebut teslameter. Teslameter ini menjadi penting mengingat banyaknya aktivitas eksperimen yang melibatkan pengukuran medan magnet, antara lain praktikum efek Zeeman dan efek Hall. Namun, diperlukan investasi yang sangat mahal yaitu berkisar puluhan juta rupiah guna merealisasikan sebuah teslameter. Sebagai gambaran, di UPT Laboratorium Pusat MIPA UNS baru memiliki dua teslameter, yaitu merk PHYWE dan F.W. BELL model 5070. Keberadaan kedua teslameter tersebut jauh dari memadai untuk proses pembelajaran fisika yang ideal di perguruan tinggi. Oleh karena itu usaha rancang bangun sebuah alat ukur medan magnet yang murah menjadi topik menarik untuk dikerjakan.
Guna mendeteksi medan magnet, terdapat beberapa metode penginderaan, yaitu metode induksi, SQUIDs, magnetoresistive, sensor efek Hall, dan fluxgate
magnetometers resonance (Craik, 1995). Setiap metode mempunyai karakteristik
masing-masing, sehingga membuat jenis teslameter semakin banyak di pasaran. Seperti metode SQUIDs, metode ini digunakan untuk mendeteksi medan magnet lemah antara 10-14 – 10-9 tesla. Sedangkan metode yang mampu mencakup nilai medan magnet di atas 1 tesla adalah metode induksi dan sensor efek Hall. Untuk metode magnetoresistive dan fluxgate magnetometers resonance, keduanya berada diantara metode sensor efek Hall dan SQUIDs, dimulai rentang 10-10 – 10-3 tesla. Dari kelima metode tersebut, metode induksi merupakan cara mendeteksi medan magnet yang paling sederhana karena dapat mendeteksi medan magnet yang diukur sepanjang lintasan hanya dengan disertai adanya perubahan fluks di
commit to user
dalamnya (Jiles, 1998). Metode induksi mengacu pada hukum Faraday dengan menggunakan kumparan, sehingga dapat dibuat sendiri. Mekanisme penginderaan medan magnet dengan metode induksi dapat dipaparkan dengan penjelasan berikut.
Hukum Faraday menyatakan jika suatu kawat penghantar digerakkan memotong arah suatu medan magnet maka akan timbul suatu gaya gerak listrik pada kawat penghantar tersebut (Griffith, 1991). Gaya gerak listrik yang timbul pada ujung-ujung penghantar karena adanya perubahan medan magnet disebut gaya gerak listrik (GGL) induksi. Selain adanya perubahan fluks, besar GGL induksi juga bergantung pada luasan tampang lintang kumparan (diameter inti kumparan) serta jumlah lilitan. Semakin besar diameter inti kumparan dan semakin banyak jumlah lilitan, maka nilai GGL induksi juga akan semakin besar. Hal inilah yang membuat metode induksi mempunyai kelebihan sebagai metode yang paling sederhana. Keistimewaan lain metode induksi adalah mempunyai jangkauan medan magnet yang lebih luas antara 10-10 – 103 tesla.
Mengingat pentingnya teslameter untuk dimiliki (terlebih oleh Jurusan Fisika FMIPA UNS), maka penulis mencoba membuat teslameter dengan metode induksi elektromagnetik. Penulis melakukan penelitian kreatif yang berkaitan dengan pembuatan teslameter sebagai alat ukur medan magnet yang baik dan dengan harga terjangkau, namun memiliki sensitivitas serta keandalan sebagaimana teslameter buatan pabrik. Sebagai alat ukur yang baik, teslameter yang selebihnya disebut teslameter JJ ini, juga akan ditera/dikalibrasi ke dalam satuan SI (tesla) dengan teslameter merk F.W. BELL model 5070.
I.2. Perumusan Masalah
Dari uraian di atas, masalah yang akan dijawab pada penelitian ini adalah mencari kaitan antara tingkat sensitivitas teslameter JJ dengan jumlah lilitan (N), luasan tampang lintang kumparan (d), serta penambahan bahan magnet berupa ferit. Unjuk kerja teslameter JJ juga akan ditampilkan melalui kurva hysterisis, sehingga karakteristik alat lebih terlihat.
commit to user
I.3. Batasan Masalah Permasalahan pada penelitian ini dibatasi pada:
1. Teslameter JJ yang direncanakan hanya untuk 3 variasi jumlah lilitan yaitu 750, 1500 dan 3000.
2. Variasi bahan untuk inti kumparan berupa penambahan ferit. Untuk luasan tampang lintang kumparan diberikan 2 variasi sensor berdiameter 0,9 cm dan 1,4 cm.
3. Pengujian yang dilakukan terhadap teslameter JJ adalah menyangkut dua karakter alat, yaitu:
a. Linieritas alat terhadap perubahan medan magnet yang diukur.
b. Pengkalibrasian alat dengan teslameter F.W. BELL model 5070, dengan cara digunakan untuk mengukur obyek yang sama yaitu elektromagnet.
I.4. Tujuan Penelitian Tujuan penelitian ini adalah sebagai berikut:
1. Membuat suatu alat ukur medan magnet berbasis induksi elektromagnetik. 2. Mengevaluasi sensitivitas teslameter JJ berdasarkan pada jumlah lilitan,
diameter tampang lintang sensor dan pengaruh ferit, sehingga diperoleh teslameter yang baik dan terjangkau harganya, tetapi memiliki sensitivitas serta keandalan sebagaimana teslameter buatan pabrik.
3. Menjelaskan respon teslameter JJ terhadap medan magnet yang ditunjukkan melalui kurva hysterisis.
I.5. Manfaat Penelitian Dengan melakukan penelitian ini diharapkan dapat:
1. Bermanfaat untuk memperdalam konsep induksi elektromagnetik. 2. Menyediakan teslameter baru yang baik dan sensitif, tetapi murah.
3. Memberikan informasi baru mengenai cara pengukuran medan magnet dengan metode induksi.
commit to user
I.6. Sistematika Penulisan
Laporan skripsi ini disusun dengan sistematika sebagai berikut:
BAB I Merupakan bab pendahuluan, berisikan tentang latar belakang penelitian, perumusan masalah, batasan masalah, tujuan penelitian, manfaat penelitian, serta sistematika penulisan skripsi.
BAB II Dasar Teori, memaparkan teori dasar dari penelitian yang dilakukan, meliputi medan magnet B, teslameter, rangkaian penguat, dan kalibrasi. Pada medan magnet diberikan metode dasar pengukuran dan karakteristik bahan magnet. Kemudian dijelaskan mengenai prinsip kerja dan jenis teslameter, dilanjutkan rangkaian penguat
integrator dan non inverting. Diberikan juga teori dasar dari kalibrasi
sebagai akhir dari bab ini.
BAB III Metode Penelitian, membahas tentang tempat, waktu dan pelaksanaan penelitian, alat dan bahan yang diperlukan, serta langkah-langkah dalam penelitian. Dalam bab ini juga diberikan langkah pembuatan dan penggunaan teslameter JJ untuk mengukur medan magnet secara lengkap.
BAB IV Hasil dan Pembahasan, berisi tentang hasil penelitian dan analisa/pembahasan yang dibahas dengan acuan dasar teori yang berkaitan dengan penelitian. Membahas mengenai kaitan sensitifitas teslameter JJ terhadap variasi lilitan, diameter tampang lintang sensor, serta pengaruh ferit sebagai inti kumparan. Dibahas pula mengenai kurva hysterisis dari teslameter JJ sehingga respon linier sebagai sensor dapat langsung diamati.
BAB V Penutup, berisi kesimpulan dari pembahasan di bab sebelumnya serta saran guna pengembangan lebih lanjut untuk memperoleh alat ukur medan magnet dengan metode induksi yang lebih baik dalam segala aspek.
commit to user
BAB II DASAR TEORI
II.1. Medan Magnet, B
Medan magnet dapat didefinisikan sebagai ruangan disekitar magnet atau penghantar yang dialiri arus listrik. Medan magnet merupakan besaran vektor sehingga untuk menyatakannya dapat digunakan garis medan. Sebagai contoh besarnya medan induksi magnet B dapat dinyatakan sebagai jumlah garis medan per satuan luas. Bila dA adalah vektor pada elemen luas S dan B adalah vektor induksi yang menembus elemen luas tersebut, maka jumlah garis gaya atau fluks
yang keluar dari permukaan S adalah
S A d B. Integral permukaan B.dA menyatakan produk skalar antara vektor dan A
d . Persamaan (2.1) dapat ditulis ulang dengan analisis vektor menggunakan teorema Stokes menjadi bentuk
S S n dA B dA B. cos . dengan adalah sudut antara vektor B dan dA, sedangkan Bn Bcos adalah komponen B pada arah normal permukaan. Hubungan di atas merupakan pernyataan matematis medan induksi magnet B yang digambarkan sebagai jumlah garis gaya tiap satuan luas, sehingga induksi magnet B disebut pula sebagai rapat fluks.
Untuk mengetahui gambaran medan magnet, keberadaannya dapat divisualisasikan dengan bantuan sebuah kompas kecil. Jika kompas memiliki kutub utara–selatan kemudian didekatkan pada sebuah magnet, jarum kompas akan menunjuk ke arah kutub magnet yang berlawanan. Jadi apabila kompas berada di dekat kutub selatan magnet, maka jarum kompas utara akan menunjuknya. Dengan kata lain apabila kedua kutubnya sama, maka jarum
B
5
(2.1)
commit to user
kompas akan bergerak menjauhi, dan mendekat jika kedua kutub berbeda. Hal ini dapat dijelaskan pada Gambar 2.1.
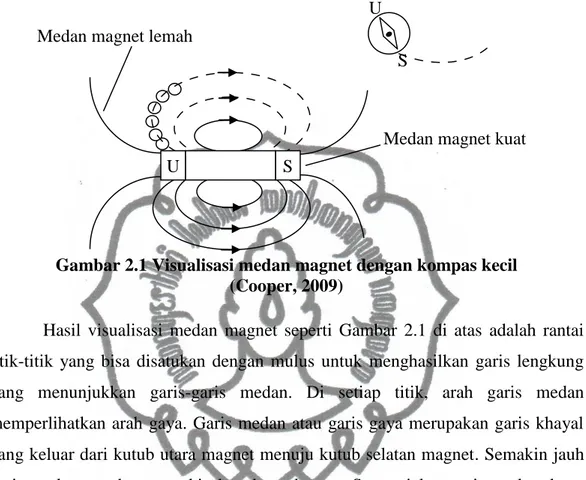
Gambar 2.1 Visualisasi medan magnet dengan kompas kecil (Cooper, 2009)
Hasil visualisasi medan magnet seperti Gambar 2.1 di atas adalah rantai titik-titik yang bisa disatukan dengan mulus untuk menghasilkan garis lengkung yang menunjukkan garis-garis medan. Di setiap titik, arah garis medan memperlihatkan arah gaya. Garis medan atau garis gaya merupakan garis khayal yang keluar dari kutub utara magnet menuju kutub selatan magnet. Semakin jauh garis medan tersebar, semakin lemah medannya. Secara jelas, garis medan dapat dilukiskan pada Gambar 2.2.
Gambar 2.2 Garis-garis medan magnet
II.1.1. Karakteristik Bahan Magnetik
Teori atom Bohr menyatakan bahwa atom terdiri atas inti atom yang dikelilingi oleh elektron yang bergerak pada orbitnya masing-masing. Jadi pada elektron tersebut mengalami dua gerak, yaitu gerak pada porosnya sendiri (gerak spin) dan gerak mengelilingi inti atom (orbital). Gerakan elektron inilah yang
Medan magnet kuat Medan magnet lemah
U S
S U
U
commit to user
menimbulkan momen magnetik di dalam atom. Elektron merupakan partikel bermuatan listrik, sehingga saat elektron bergerak dapat pula dipandang sebagai muatan listrik yang bergerak atau arus listrik. Menurut Hukum Biot-Savart, arus listrik tersebut akan menimbulkan medan magnet di sekitarnya. Dengan demikian sebuah atom dapat dipandang sebagai sebuat magnet batang yang memiliki momen magnetik (Griffith, 1991).
Berdasarkan respon material terhadap medan magnet, terdapat tiga karakteristik bahan magnetik yang berbeda, yaitu:
II.1.1.1. Diamagnetik
Diamagnetik merupakan bentuk terlemah dari proses magnetisasi yang bersifat non permanen dan berlangsung ketika diberikan medan luar. Bentuk magnetisasi ini diinduksikan oleh perubahan gerak orbital elektron yang diakibatkan adanya medan magnet luar. Dengan kata lain, bahan diamagnetik tersusun dari atom yang tidak mempunyai momen magnetik permanen. Hal ini disebabkan momen magnetik dari gerak orbit dan spin elektron yang sama besar, tetapi berlawanan arah sehingga saling meniadakan. Oleh karena itu, momen magnetik atom diamagnetik bernilai nol. Suseptibilitas bahan diamagnetik m bernilai negatif yaitu pada orde –10-5. Tanda negatif menyatakan bahwa vektor magnetisasi M berlawanan arah dengan kuat medan magnet H sehingga permeabilitas magnetik bahan m lebih kecil dibandingkan permeabilitas ruang hampa0.
II.1.1.2. Paramagnetik
Suatu bahan disebut paramagnetik apabila atom-atomnya memiliki momen magnetik dari gerak orbit dan spin elektron yang tidak sepenuhnya saling meniadakan. Sehingga atom semacam ini memiliki suatu nilai momen magnetik yang kecil, tetapi bukan nol. Apabila pada bahan ini tidak ada medan magnet luar, akan menyebabkan orientasi momen magnetik atom berarah random. Setelah diberikan medan magnet luar, momen magnetik atom cenderung berbelok menjadi searah dengan medan luar tersebut. Kesearahan ini akan meningkatkan nilai
commit to user
permeabilitas magnetik sehingga lebih besar dari sebelumnya . Jadi bahan
paramagnetik tidak akan memperlihatkan sifat kemagnetan tanpa adanya medan magnet luar. Vektor magnetisasi M searah dengan kuat medan magnet H. Suseptibilitas magnetnya kecil, tetapi bernilai positif (0 < m << 1) yaitu pada interval 10-5 hingga 10-3 (Serway, 1995).
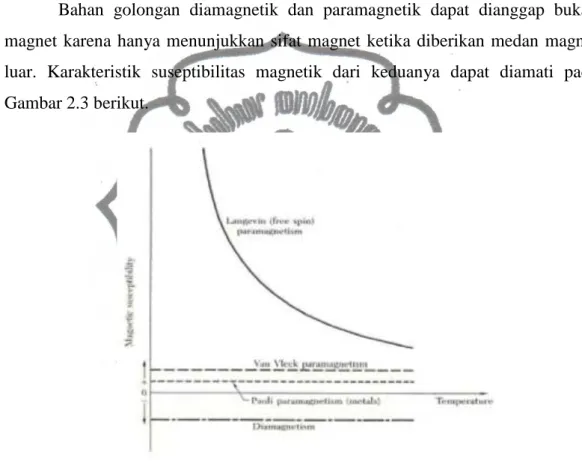
Bahan golongan diamagnetik dan paramagnetik dapat dianggap bukan magnet karena hanya menunjukkan sifat magnet ketika diberikan medan magnet luar. Karakteristik suseptibilitas magnetik dari keduanya dapat diamati pada Gambar 2.3 berikut.
Gambar 2.3 Karakteristik suseptibilitas magnetik dari bahan diamagnetik dan paramagnetik (Kittel, 1996)
II.1.1.3. Feromagnetik
Golongan feromagnetik adalah bahan yang atom-atomnya mempunyai momen magnetik permanen. Tiap-tiap atom memiliki momen magnetik yang relatif besar, karena momen magnetik dari gerak spin yang kurang akan diimbangi oleh momen magnetik yang lain. Gaya antar atom menyebabkan momen-momen ini tertata dalam suatu konfigurasi yang sejajar di dalam daerah yang memuat banyak atom. Daerah-daerah semacam ini disebut sebagai domain. Bahan-bahan feromagnetik yang masih murni (belum diberikan medan magnet luar), akan
m
commit to user
memiliki domain- domain yang masing-masing menunjukkan momen magnetik yang kuat. Namun, dari satu domain ke domain yang lainnya, momen-momen ini memiliki arah yang berbeda-beda. Efek total yang dihasilkan tentu saja momen-momen tersebut saling meniadakan, dan bahan tersebut secara keseluruhan tidak memperlihatkan sifat kemagnetan. Akan tetapi, saat sebuah medan magnet luar diberikan, domain- domain yang memiliki momen magnetik searah medan luar akan membesar ukurannya dan menyebar ke daerah-daerah di sekitarnya. Hal ini berakibat medan di dalam bahan menjadi jauh lebih besar daripada medan yang dari luar, M >> H, sehingga menyebabkan nilai permeabilitas magnetik ribuan kali lebih besar dari sebelumnya . Dengan demikian nilai suseptibilitas magnet m untuk bahan feromagnetik sangat besar mencapai orde 106.
Ketika medan luar dihilangkan, domain-domain tersebut tidak dapat sepenuhnya kembali ke orientasi awalnya yang relatif acak, justru akan terdapat medan magnet residu yang tertinggal dalam skala makroskopik dalam bahan. Fakta bahwa setelah penerapan medan magnet luar, momen magnetik dalam bahan menjadi berbeda dari sebelumnya, merujuk pada karakteristik histerisis bahan golongan feromagnetik. Contoh yang termasuk golongan feromagnetik antara lain besi, baja, kobalt, dan nikel. Golongan ini terbagi menjadi kelas antiferomagnetik dan ferimagnetik seperti dijelaskan berikut:
a. Antiferomagnetik
Di dalam bahan antiferomagnetik, gaya-gaya yang bekerja di antara atom-atom yang bersebelahan menyebabkan momen-momen atomik tersusun dalam konfigurasi yang antiparalel sehingga momen magnetik pada tiap atom adalah nol. Golongan ini hanya terpengaruh sedikit saja oleh adanya medan magnet luar. Sifat antiferomagnetik hanya dapat muncul pada suhu-suhu yang relatif rendah, yang seringkali berada jauh di bawah suhu-suhu kamar. Oleh karena itu, belum diketahui manfaat penting bahan antiferomagnetik dalam bidang rekayasa teknologi (engineering). Berbagai senyawa oksida, sulfida dan klorida digolongakan dalam golongan ini.
m
0
commit to user
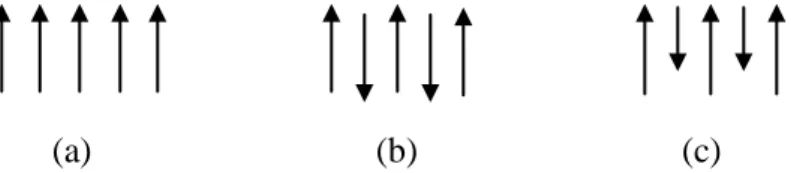
(a) (b) (c)
Gambar 2.4 Susunan spin elektron (a) Feromagnetik (b) Antiferomagnetik (c) Ferimagnetik
(Kittel, 1996) b. Ferimagnetik
Bahan ferimagnetik memperlihatkan pula konfigurasi momen-momen atomik yang antiparalel, tetapi besar tiap-tiap momen ini tidak sama. Oleh karenanya, momen magnetik dalam bahan ini juga cukup besar meski tidak sebesar pada bahan-bahan feromagnetik. Kelompok terpenting dari golongan ferimagnetik adalah ferit, yaitu bahan dengan konduktivitas rendah yang nilainya hanya seperseribu atau bahkan seperseratus ribu dari konduktivitas semikonduktor (Buck dan Hayt, 2006). Sehingga bahan ferimagnetik memiliki tahanan listrik yang lebih besar dibanding bahan feromagnetik. Sifat magnetiknya yang kuat juga membuat feritsangat baik jika digunakan untuk inti kumparan.
II.1.2. Intensitas Medan Magnet
Seperti yang ditunjukkan pada Gambar 2.1, setiap magnet tentu mempunyai medan magnet di sekitarnya. Semakin jauh garis medan tersebar, maka semakin lemah medannya. Oleh karena itu terdapat beberapa faktor yang mempengaruhi intensitas medan magnet tersebut, antara lain:
a. Posisi pengukuran medan magnet
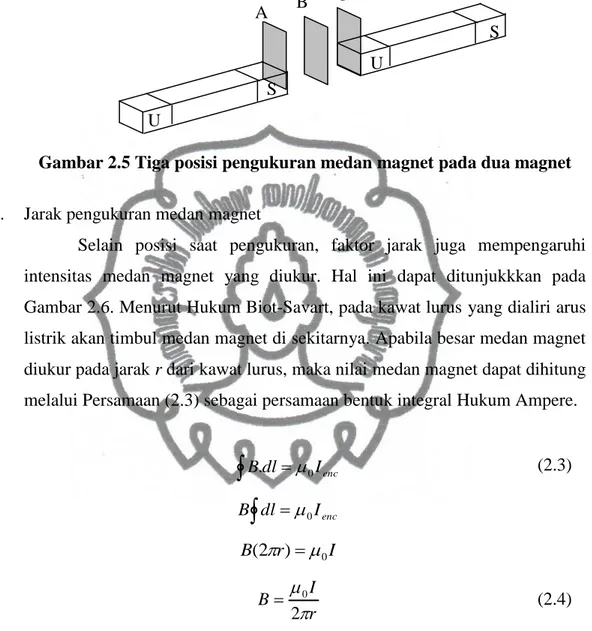
Apabila sebuah magnet didekatkan dengan sekumpulan paku, maka akan terlihat paku lebih banyak menempel di ujung dekat kutub, daripada di tengah. Hal ini membuktikan bahwa medan magnet yang kuat terletak di ujung magnet yakni dekat kutub, daripada di tengah magnet. Sehingga pengukuran medan magnet di dekat kutub akan bernilai lebih besar daripada di tengah magnet. Apabila diterapkan untuk dua magnet, terdapat tiga posisi pengukuran medan magnet yang dapat dilihat pada Gambar 2.5. Posisi A, B,
commit to user
S U
dan C merupakan posisi teslameter ketika digunakan untuk mengukur medan magnet.
Gambar 2.5 Tiga posisi pengukuran medan magnet pada dua magnet b. Jarak pengukuran medan magnet
Selain posisi saat pengukuran, faktor jarak juga mempengaruhi intensitas medan magnet yang diukur. Hal ini dapat ditunjukkkan pada Gambar 2.6. Menurut Hukum Biot-Savart, pada kawat lurus yang dialiri arus listrik akan timbul medan magnet di sekitarnya. Apabila besar medan magnet diukur pada jarak r dari kawat lurus, maka nilai medan magnet dapat dihitung melalui Persamaan (2.3) sebagai persamaan bentuk integral Hukum Ampere.
B.dl 0Ienc
dl Ienc B 0 I r B(2 )0 r I B 2 0 Berdasarkan Persamaan (2.4), dapat dilihat bahwa nilai medan magnet B selain dipengaruhi oleh arus, juga ditentukan oleh jarak pengukurannya r. Ketika jarak pengukurannya jauh dari sumber (dalam contoh berupa kawat lurus), maka nilai medan magnet akan semakin kecil begitupun sebaliknya. Sehingga dapat disimpulkan pula, intensitas medan magnet berbanding terbalik dengan jarak.
U S A B C (2.3) (2.4)
commit to user
Gambar 2.6 Sebuah kawat lurus yang dialiri arus listrik (Griffith, 1991)
c. Kekuatan magnetik bahan itu sendiri
Intensitas medan magnet di titik tertentu tidak hanya tergantung pada seberapa jauh titik itu dari magnet, namun juga pada kekuatan magnet itu sendiri (Cooper, 2009). Berdasarkan karakteristik bahan magnet, golongan ferimagnetik merupakan kelas yang memiliki sifat magnetik paling kuat dengan ferit sebagai kelompok terpentingnya. Umumnya berbentuk silinder dan dapat tertarik oleh magnet kuat di sekitarnya.
Ketika ferit menjadi magnet, sama halnya dengan magnet batang, pada ferit akan terdapat garis medan. Apabila ferit digunakan sebagai sensor dengan metode induksi, maka kesensitifan sensor akan bertambah karena adanya medan magnet yang lebih kuat dan bernilai lebih besar. Medan magnet ini berasal dari ferit yang telah menjadi magnet, dan berasal dari obyek yang akan diukur besar medan magnetnya. Jadi apabila bahan yang digunakan untuk membuat alat ukur atau sensor sebelumnya telah memiliki sifat magnetik yang sangat kuat, maka akan berpengaruh pada intensitas medan magnet yang juga akan semakin besar.
II.2 Metode Pengukuran Medan Magnet
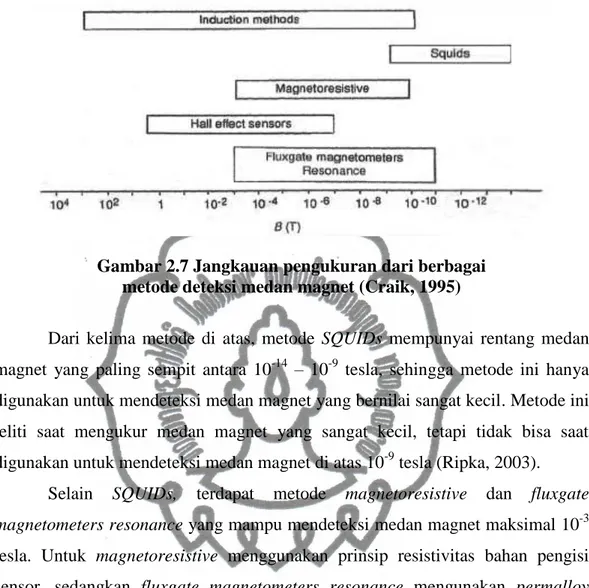
Ada beberapa metode yang dapat digunakan untuk mengukur medan magnet. Metode tersebut dibagi menjadi lima, yang masing-masing memiliki kelebihan dan kekurangan untuk dijadikan sebagai prinsip mengukur medan magnet. Berikut gambar yang menunjukkan rentang pengukuran dari berbagai metode pengukuran medan magnet.
B
I
commit to user
Gambar 2.7 Jangkauan pengukuran dari berbagai metode deteksi medan magnet (Craik, 1995)
Dari kelima metode di atas, metode SQUIDs mempunyai rentang medan magnet yang paling sempit antara 10-14 – 10-9 tesla, sehingga metode ini hanya digunakan untuk mendeteksi medan magnet yang bernilai sangat kecil. Metode ini teliti saat mengukur medan magnet yang sangat kecil, tetapi tidak bisa saat digunakan untuk mendeteksi medan magnet di atas 10-9 tesla (Ripka, 2003).
Selain SQUIDs, terdapat metode magnetoresistive dan fluxgate
magnetometers resonance yang mampu mendeteksi medan magnet maksimal 10-3
tesla. Untuk magnetoresistive menggunakan prinsip resistivitas bahan pengisi sensor, sedangkan fluxgate magnetometers resonance mengunakan permalloy yang memberikan sinyal nol pada kumparan pencuplik, B = 0. Kumparan pencuplik merupakan kumparan yang digunakan untuk menangkap sinyal medan magnet dari kumparan pengimbas yang menjadi kumparan primer dalam metode
fluxgate magnetometers resonance. Cakupan minimal medan magnet untuk kedua
metode ini berbeda. Magnetoresistive dimulai dari 10-10 tesla, sedangkan fluxgate
magnetometers resonance justru mampu lebih kecil lagi yaitu 10-11 tesla. Jadi
kedua metode ini mampu mendeteksi nilai medan magnet yang tidak bisa terdeteksi oleh metode SQUIDs.
Metode selanjutnya yaitu Hall effect sensors menggunakan efek Hall sebagai prinsip kerjanya. Metode ini banyak digunakan pada teslameter buatan pabrik karena dapat menjelaskan apa yang terjadi pada elektron suatu bahan, apabila dilewatkan pada pelat konduktor yang dialiri medan magnet, persis yang
commit to user
U S
terjadi saat teslameter digunakan untuk mengukur medan magnet. Sensor efek Hall mampu mendeteksi medan magnet minimal 10-7 tesla.
Untuk metode kelima yakni induction methods bekerja berdasarkan prinsip Hukum Faraday. Metode induksi menggunakan sebuah kumparan yang bila digerakkan dalam suatu medan magnet akan menimbulkan tegangan induksi. Karenanya metode ini merupakan metode yang paling sederhana daripada metode yang lain, sehingga dapat dibuat sendiri. Metode induksi bekerja dengan rentang paling luas, berada antara 10-10 – 103 tesla.
Dalam penerapannya, terdapat dua metode yang sering digunakan yaitu metode induksi dan sensor efek hall karena mempunyai kelebihan mampu menjangkau nilai medan magnet di atas 1 tesla.
II.2.1. Metode Induksi
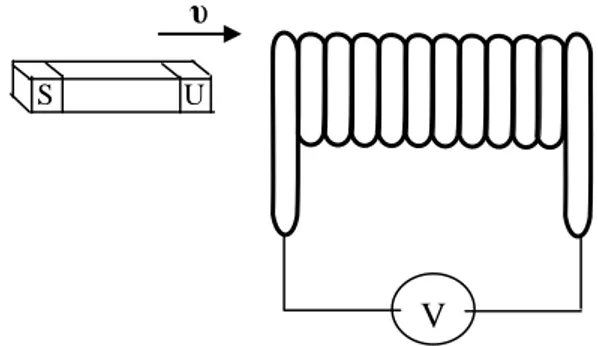
Metode induksi bekerja melalui pengukuran fluks magnetik yang merangkum mengenai Gaya Gerak Listrik induksi (GGL induksi), dimana kuat medan dapat diukur sepanjang lintasan elektrik dengan disertai adanya perubahan fluks di dalamnya (Jiles, 1998). Jika suatu kawat penghantar digerakkan memotong arah suatu medan magnet maka akan timbul suatu GGL induksi. Gambar 2.8 memperlihatkan diagram skematik mekanisme terjadinya GGL induksi.
Gambar 2.8 Diagram skematik mekanisme terjadinya GGL induksi Gambar 2.8 menjelaskan bahwa ketika magnet batang digerakkan keluar masuk kumparan dengan kecepatan υ, maka jarum voltmeter yang terhubung oleh kumparan tersebut akan bergerak menyimpang dari nol. Nilai tegangan dari voltmeter inilah yang disebut dengan tegangan induksi (GGL induksi).
V υ
commit to user
Hukum Faraday menyebutkan bahwa apabila suatu kumparan dengan jumlah lilitan N ditempatkan di dalam medan magnet sehingga memotong garis gaya magnet atau fluks yang berubah menurut waktu d dtmaka pada kumparan tersebut akan timbul GGL induksi V. Sehingga GGL induksi tidak hanya timbul karena penghantar yang digerakkan dalam medan magnet saja, melainkan dapat timbul asalkan ada perubahan fluks magnetik. Apabila dituliskan dalam persamaan diperoleh bentuk:
dt d N
V
Apabila A merupakan luasan tampang lintang kumparan dan N adalah banyak lilitan suatu kumparan, maka B A sehingga:
dt dB NA
V
Persamaan (2.6) menunjukkan bahwa adanya medan magnet yang berubah terhadap waktu dB dt akan menghasilkan GGL induksi atau dapat dikatakan GGL induksi muncul karena adanya medan magnet yang berubah-ubah (Buck dan Hayt, 2006). Selain adanya medan magnet yang berubah terhadap waktu, GGL induksi juga dipengaruhi oleh jumlah lilitan kumparan dan luasan tampang lintang kumparan. Jadi semakin banyak lilitan dan semakin luas tampang lintang kumparan, maka nilai GGL induksi yang dihasilkan juga akan semakin besar.
II.2.2. Sensor Efek Hall
Efek Hall merupakan suatu fenomena dimana bila sebuah bahan dialiri arus listrik serta diletakkan di medan magnet, maka terjadi pengumpulan atau penumpukan muatan pada kedua sisi penghantar yang menyebabkan munculnya medan listrik antara kedua sisi (selebihnya disebut sebagai medan Hall, EH). Efek Hall merupakan fenomena fisis yang penting karena merepresentasikan interaksi muatan dengan medan magnet pada sebuah pelat konduktor. Fenomena ini dapat dijelaskan dengan meninjau suatu balok logam yang dialiri arus listrik dan
(2.5)
commit to user x
y
z
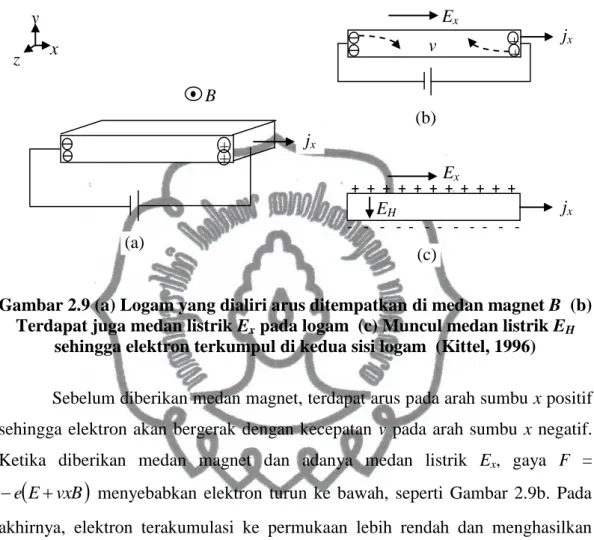
ditempatkan pada medan magnet yang arahnya tegak lurus arah arus listrik seperti terlihat pada Gambar 2.9.
Gambar 2.9 (a) Logam yang dialiri arus ditempatkan di medan magnet B (b) Terdapat juga medan listrik Ex pada logam (c) Muncul medan listrik EH
sehingga elektron terkumpul di kedua sisi logam (Kittel, 1996)
Sebelum diberikan medan magnet, terdapat arus pada arah sumbu x positif sehingga elektron akan bergerak dengan kecepatan v pada arah sumbu x negatif. Ketika diberikan medan magnet dan adanya medan listrik Ex, gaya F =
E vxB
e
menyebabkan elektron turun ke bawah, seperti Gambar 2.9b. Pada akhirnya, elektron terakumulasi ke permukaan lebih rendah dan menghasilkan muatan negatif di bagian tersebut. Kemudian muatan positif ke permukaan atas karena pada daerah tersebut kekurangan elektron. Kombinasi muatan positif dan negatif ini menimbulkan adanya medan listrik ke arah bawah, yang disebut sebagai medan Hall, EH (Omar, 1975).
Gaya Lorentz L membuat muatan terakumulasi pada arah sumbu y negatif dan bernilai FL = evxBdengan tandanya negatif seperti terlihat di Gambar 2.9b.
(vx bergerak ke kiri). Medan Hall yang ada karena pengumpulan muatan
menghasilkan gaya yang melawan Gaya Lorentz. Proses penumpukan terus berlanjut sampai gaya Hall sepenuhnya mampu membatalkan gaya Lorentz. Keadaaan stabil diperoleh ketika FH = FL.
(a) jx B + + (b) Ex jx v + + + + + + + + + + + + + + + + - - - - - - - - - - - - jx Ex EH (c)
commit to user B ev eEH x atau EH vxB B j Ne EH 1 x
Persamaan (2.8) merupakan persamaan medan Hall dengan vx ditulis dalam bentuk rapat arus jx = N (-e)vx. Medan Hall sebanding dengan adanya arus dan medan magnet. Berdasarkan Omar (1975), kesebandingan konstanta yaitu
B j
EH x disebut sebagai konstanta Hall dan biasanya disimbolkan RH sehingga Persamaan (2.8) menjadi: Ne RH 1
N merupakan konsentrasi elektron, yang nilainya berlawanan dengan RH. Dengan demikian, N dapat diketahui melalui perhitungan medan Hall. Apabila RH masing-masing bahan diketahui, maka dapat diketahui juga logam mana yang mempunyai kemampuan konduktor yang baik.
II.3. Teslameter
II.3.1. Prinsip Kerja Teslameter
Hampir semua merk dan jenis teslameter menggunakan efek Hall sebagai prinsip kerjanya. Efek Hall merepresentasikan interaksi muatan dengan medan magnet pada sebuah pelat konduktor. Sensor efek Hall biasanya digunakan dalam pengukuran medan magnet statis atau DC. Prinsip kerjanya seperti yang telah terurai sebelumnya dalam sub bab sensor efek Hall.
II.3.2. Jenis Teslameter
Berbagai jenis teslameter dengan karakteristik berbeda-beda banyak terdapat di pasaran. Apabila ditinjau dari metode yang digunakan, hampir semua teslameter menggunakan metode efek Hall dengan tipe teslameter digital. Namun dilihat dari bentuknya, terdapat beberapa jenis teslameter yang sering ditemukan antara lain:
(2.7) (2.8)
commit to user
a. Teslameter bentuk handy
Gambar 2.10 Teslameter digital Chen Yang tipe CYHT 20 (http://www.chenyang-gmbh.com)
Teslameter jenis ini mempunyai keistimewaan berbentuk simpel, mudah dipindahkan, dan mempunyai cara penyimpanan yang ringkas serta nyaman di tangan. Gambar di samping merupakan salah satu teslameter jenis handy merk Chen Yang tipe CYHT 20.
b. Teslameter portable
Gambar 2.11 Teslameter digital F.W. BELL model 5070
Gambar di atas merupakan salah satu teslameter jenis portable merk F.W. BELL model 5070, yang mana teslameter jenis ini mempunyai cirri hampir sama dengan teslameter handy. Hanya saja bentuk teslameter ini sedikit lebih besar, tidak pas dalam genggaman tangan.
commit to user
c. Teslameter non-portable
Gambar 2.12 Teslameter Digital YUXIANG Tipe SG-3-A/B (http://www.magnets.com)
Jenis ini disebut teslameter non-portable karena bentuknya yang besar, banyak memakan tempat dan tidak praktis untuk dibawa. Meski demikian, ketelitian teslameter jenis ini juga tidak kalah dengan dua jenis sebelumnya. Gambar di atas adalah teslameter digital merk YUXIANGTipe SG-3-A/B.
II.4. Penguat Operasional (Op Amp) II.4.1. Integrator
Karakteristik dasar dari integrator yaitu mengintegrasikan fungsi gelombang dari sinyal yang diberikan padanya. Artinya, apabila sinyal masukan berupa fungsi gelombang sinus, maka sinyal keluarannya akan berbentuk fungsi gelombang cosinus. Jika bentuk sinyal masukan berupa fungsi gelombang kotak, maka sinyal keluarannya akan berbentuk fungsi gelombang segitiga (Gayakwad, 2000).
Elemen umpan balik pada rangkaian di atas yaitu sebuah kapasitor nonpolar yang membentuk rangkaian RC dengan resistor input. Sinyal masukan diintegralkan dan sekaligus menyatakan ”luasan di bawah kurva” penguatan tegangannya, yang berdasarkan nilai resistor dan kapasitornya (Putra, 2002).
Penguat Tegangan =
t idt V C R1. 0 1Apabila GGL induksi sebagai fungsi waktu dan hasil keluaran dari kumparan diintegrasikan pada selang waktu ∆t = 0 – t, maka menurut Gordon dan (2.10)
commit to user
Marin (1970), tegangan keluaran dari integrator dapat dihitung secara teoritis dengan Persamaan (2.11) berikut.
RC NAB dt t V RC t V t i
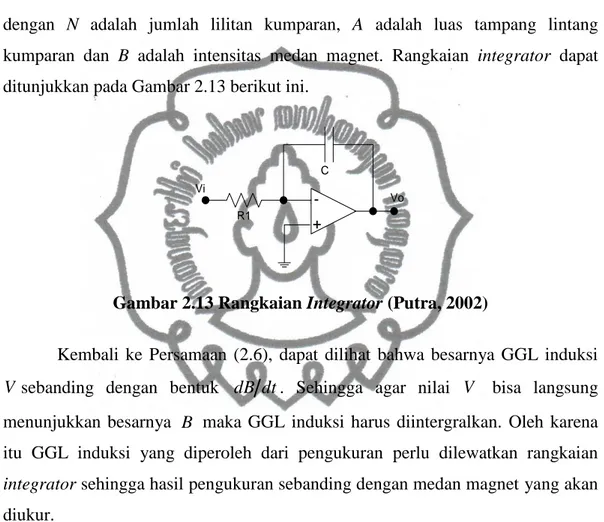
0 0 ( ) 1 ) (dengan N adalah jumlah lilitan kumparan, A adalah luas tampang lintang kumparan dan B adalah intensitas medan magnet. Rangkaian integrator dapat ditunjukkan pada Gambar 2.13 berikut ini.
Vi C R1 -+ Vo
Gambar 2.13 Rangkaian Integrator (Putra, 2002)
Kembali ke Persamaan (2.6), dapat dilihat bahwa besarnya GGL induksi V sebanding dengan bentuk dB dt. Sehingga agar nilai V bisa langsung menunjukkan besarnya B maka GGL induksi harus diintergralkan. Oleh karena itu GGL induksi yang diperoleh dari pengukuran perlu dilewatkan rangkaian
integrator sehingga hasil pengukuran sebanding dengan medan magnet yang akan
diukur.
II.4.2. Penguat Non Inverting
Karakteristik dasar dari penguat non inverting adalah menguatkan sinyal masukan tanpa melakukan perubahan fase. Sinyal masukan diberikan pada bagian
non inverting (+), sedang keluaran yang dihasilkan diumpan balikkan pada
masukan inverting (-) dengan menggunakan sebuah resistor R2. R1 dan R2 akan membentuk jaringan pembagi tegangan yang mengurangi tegangan keluaran Vo dan menghubungkan tegangan yang terkurangi menuju ke masukan inverting (-). Gambar rangkaian penguat non inverting dapat diamati pada Gambar 2.14.
commit to user R2 Vi -+ Vo R1
Gambar 2.14 Rangkaian penguat noninverting (Putra, 2002) Persamaan yang dapat diberikan berdasarkan gambar di atas adalah
i o V R R V 1 2 1
dengan nilai penguat tegangan atau voltage gain-nya dituliskan sebagai berikut.
Penguat Tegangan = 1 2 1 R R V V i o
Berdasarkan karakteristiknya, maka rangkaian ini diperlukan untuk menguatkan suatu variabel yang bernilai sangat kecil tanpa perubahan fase. Jadi ketika diperoleh hasil pengukuran GGL induksi yang sangat kecil, nilainya dapat diperkuat menggunakan penguat non inverting sehingga diperoleh nilai GGL induksi akhir yang lebih besar dan tanpa adanya perubahan fase.
II.5. Kalibrasi
Kalibrasi adalah serangkaian kegiatan yang bertujuan untuk menentukan kebenaran konvensional nilai penunjukkan alat ukur dan bahan ukur dengan cara membandingkan terhadap standar ukur yang mampu telusur (traceable) untuk satuan ukuran ke standar nasional dan atau internasional (PPI-KIM, 2005). Beberapa persyaratan teknis dalam melakukan kalibrasi, khususnya untuk kalibrasi teslameter adalah:
(2.13) (2.12)
commit to user
1. Personil
Personil yang melakukan kalibrasi harus memiliki kualifikasi memadai tentang prinsip dasar kalibrasi dan pengukuran, latar belakang pendidikan relevan, mampu mengoperasikan alat, serta dapat mengambil keputusan. 2. Metode kalibrasi dan validasi metode
Setiap kalibrasi yang dilakukan harus menggunakan metode yang sesuai. Metode tersebut sebaiknya telah dipublikasikan secara nasional maupun internasional. Apabila tidak tersedia metode yang telah dipublikasikan, laboratorium dapat menyusun sendiri metode kalibrasi, asal metode tersebut telah divalidasi dulu sebelum digunakan.
Untuk metode kalibrasi pada teslameter JJ menggunakan metode eksperimental dengan bantuan teslameter yang telah terkalibrasi sebelumnya. Digunakan teslameter F.W. BELL model 5070 sebagai kalibrator dengan cara membuat kesebandingan data antara teslameter JJ dan teslameter F.W. BELL model 5070, hasil pengukuran obyek yang sama yaitu elektromagnet.
3. Peralatan
Peralatan standar yang digunakan untuk mengkalibrasi harus dijaga ketertelusurannya ke sistem SI melalui program kalibrasi yang terencana. Sehingga untuk menjadikan alat ukur tersebut sebagai kalibrator, hendaknya alat ukur tersebut telah dikalibrasi sebelumnya. Sebagai gambaran untuk kalibrator pada teslameter JJ menggunakan teslameter F.W. BELL model 5070 yang sebelumnya telah terkalibrasi.
4. Ketertelusuran pengukuran
Parameter-parameter ukur yang dihasilkan selama proses produksi secara konsisten dijaga dengan mengacu ke satuan ukur yang telah disepakati. Sebagai contoh medan magnet menggunakan satuan ukur tesla (T).
commit to user
BAB III
METODOLOGI PENELITIAN
III.1. Metode Penelitian
III.1.1. Metode Pembuatan Teslameter JJ
Metode dalam pembuatan teslameter JJ berupa metode eksperimental, dengan urutan pembuatan kumparan sebagai sensor (Njj), rangkaian integrator,
dan non inverting. Pembuatan kumparan (Njj) dengan tiga variasi jumlah lilitan
yaitu 750, 1500, dan 3000 lilitan. Selain jumlah lilitan, variasi lain yang dilakukan untuk mengetahui tingkat kesensitifan sensor yaitu luasan tampang lintang kumparan berupa 0,9 cm dan 1,4 cm, serta penambahan ferit sebagai inti kumparan.
Jumlah lilitan kumparan dipilih mulai dari 750 karena di UPT Laboratorium Pusat MIPA UNS telah tersedia prototype kumparan dengan 500 lilitan, tetapi belum mampu menunjukkan nilai GGL induksi yang signifikan. Ketika digunakan untuk menunjukkan mekanisme terjadinya GGL induksi seperti ditunjukkan Gambar 2.8, simpangan jarum pada multimeter sangat kecil sehingga belum bisa menunjukkan adanya GGL induksi. Oleh karena itu digunakan jumlah lilitan minimal 750 dengan harapan GGL induksi yang diperoleh bisa lebih besar sehingga dapat terbaca. Sedangkan pada penggunaan bahan inti kumparan, sengaja digunakan bahan bukan magnet yaitu pipa plastik dan bahan magnet yaitu ferit dari kelas ferimagnetik. Agar pengaruh luasan tampang lintang kumparan dapat dilihat langsung sesuai persamaan (2.6), maka pada bahan bukan magnet dilakukan variasi luasan yaitu pipa plastik berdiameter kecil ukuran 0,9 cm dan pipa berdiameter besar ukuran 1,4 cm.
Untuk mempermudah penulisan, jenis-jenis teslameter JJ dinamakan sebagai berikut:
Jumlah lilitan 750 dinamakan JJ_750 Jumlah lilitan 1500 dinamakan JJ_1500 Jumlah lilitan 3000 dinamakan JJ_3000
commit to user
Sensor dengan diameter luas tampang lintang 0,9 cm dinamakan K Sensor dengan diameter luas tampang lintang 1,4 cm dinamakan B
Sensor dengan inti kumparan ferit dinamakan F
Sehingga apabila ingin menyebut jenis teslameter JJ dengan diameter luas tampang lintang 1,4 cm dan berjumlah 750 lilitan, disebut JJ_750B.
Casing sensor dibuat dengan bahan akrilik. Penggunaan bahan akrilik
sebagai casing sensor diharapkan agar teslameter JJ mempunyai kelebihan sebagai alat ukur yang efisien, ringan, dan tahan patah. Di bawah ini diperlihatkan gambar beberapa kumparan dalam teslameter JJ yang bekerja sebagai sensor. Berturut-turut dari gambar di atas A adalah JJ_750F, B adalah JJ_1500K, dan C adalah JJ_3000B.
Gambar 3.1 Kumparan sebagai sensor magnet dalam teslameter JJ Bagian berikutnya dari teslameter JJ adalah rangkaian penguat. Dalam pembuatan rangkaian ini, baik integrator maupun non inverting, dipikirkan mengenai bahan dan komponen yang berkualitas sehingga diperoleh rangkaian dengan sistem kerja yang baik, mulai dari IC, resistor, hingga kapasitor. Setelah diperoleh rangkaian penguat, langkah selanjutnya adalah merangkainya dengan kumparan. Baru kemudian uji kelayakan pada teslameter JJ dengan melakukan pengujian alat yang menyangkut linieritas alat terhadap perubahan medan magnet yang diukur, serta kalibrasi alat menggunakan teslameter F.W. BELL model 5070 yang selanjutnya dalam penulisan skripsi ini disebut teslameter F.W.B.
commit to user
III.1.2. Metode Pengambilan Data
Metode pengambilan data dalam penelitian ini menggunakan metode eksperimental yang berdasarkan pada metode induksi. Setelah sensor terangkai dengan rangkaian dan multimeter sehingga menjadi satu kesatuan yang disebut teslameter JJ (Gambar 3.3), kemudian alat ini digunakan untuk mengukur medan magnet dari elektromagnet. Pengukuran dilakukan dengan tiga posisi teslameter seperti Gambar 2.5 sehingga pengaruh posisi pengukuran dengan intensitas medan magnet dapat dilihat.
Prinsip kerja metode induksi adalah adanya perubahan fluks magnetik, sehingga penggunaan teslameter JJ dengan cara menggerakkan sensor ke atas ke bawah antara ruang kutub magnet. Data yang diambil adalah nilai tegangan induksi dari teslameter JJ dan nilai medan magnet dari teslameter F.W.B, dengan menggunakan arus 0–4 ampere. Obyek yang digunakan sebagai pengambilan data merupakan serangkaian alat elektromagnet yang berada di UPT Laboratorium Pusat MIPA UNS (Gambar 3.2).
III.2. Tempat dan Waktu Penelitian
Penelitian ini dilakukan di UPT Laboratorium Pusat MIPA UNS serta Laboratorium Elektronika dan Instrumentasi Jurusan Fisika FMIPA UNS selama 5 bulan, mulai dari bulan April 2010 sampai dengan Agustus 2010.
III.3. Alat dan Bahan III.3.1. Pembuatan Kumparan a. Kawat email diameter 0,23 mm +5000 m
b. Pipa berdiameter 0,9 cm dan 1,4 cm masing masing 15 cm
c. Ferit 15 cm
d. Socket jack banana 9 pasang
e. Akrilik dengan tebal 5mm 60 x 60 cm
commit to user
III.3.2. Pembuatan Rangkaian Integrator dan Non Inverting a. Kapasitor jenis tantalum 330 nF 1 buah
b. Resistor 1KΩ 2 buah
c. Integrated Circuit tipe OP 07 2 buah
d. Potensiometer 1KΩ 1 buah
e. Binding buse kecil 2 set
f. Solder 1 buah
g. Pelat PCB Mascot Circuits PS-750 1 buah
h. Tenol secukupnya
i. Kabel tembaga kecil secukupnya
III.3.3. Pengambilan Data
a. Elektromagnet yang berada di UPT Laboratorium Pusat MIPA UNS
Berupa serangkaian alat elektromagnet dengan keterangan dan gambar sebagai berikut:
Gambar 3.2 Serangkaian alat elektromagnet sebagai obyek pengukuran medan magnet
Keterangan gambar:
A = Power Supply sebagai penyedia arus untuk elektromagnet (kumparannya).
B = Kapasitor untuk menyimpan muatan arus supaya lebih stabil sehingga aman ketika masuk elektromagnet.
A
B
C
D A
commit to user
C = Elektromagnet berupa kumparan merk PHYWE 06480.01 dengan panjang 5 cm, jumlah lilitan 842 lilitan, hambatan 2,66 Ω, dan arus maksimal 4 ampere.
D = Multimeter untuk membaca arus dari power supply yang masuk ke elektromagnet.
b. Teslameter JJ dan teslameter F.W.B
R3 = 1 KΩ Vi C = 330 nF -+ R1 = 1 KΩ -+ OP 07 Vo int OP 07 Vo akhir V R2 = 1 KΩ Njj
Gambar 3.3 Diagram skematik rancangan teslameter JJ
Gambar 3.3 menunjukkan keempat bagian dari teslameter JJ berupa kumparan yang juga sebagai sensor magnet (Njj), rangkaian integrator, rangkaian penguat non inverting, dan display sistem berupa voltmeter. Sedangkan teslameter F.W.B dapat dilihat pada Gambar 2.11.
c. Power Supply + 5V sebagai masukan untuk IC dalam rangkaian penguat.
Pada prinsipnya, power supply sebagai masukan daya pada IC dapat menggunakan inventaris laboratorium. Akan tetapi dengan pertimbangan lebih praktis, maka dalam penelitian ini power supply dibuat manual sehingga dapat langsung terangkai dengan rangkaian penguat menjadi kesatuan sistem instrumentasi pada teslameter JJ, seperti terlihat di lampiran B.
commit to user
III.4. Prosedur Penelitian III.4.1. Diagram Alir Penelitian
Gambar 3.4. Diagram alir penelitian Mulai
Menggunakan teslameter JJ untuk mengukur medan magnet pada elektromagnet
Hasil Data
Selesai
Merangkai kumparan dengan rangkaian integrator, penguat non inverting, dan voltmeter
Membuat rangkaian integrator dan penguat non inverting
Menguji alat menggunakan jenis teslameter JJ_3000B
Membuat kumparan (Njj) dengan variasi N, d, dan bahan untuk inti kumparan
Teslameter JJ dapat mengukur B
Tidak
Kalibrasi alat dengan teslameter F.W.B
Mengolah dan menginterpretasi data Sesuai
Tidak sesuai Ya
commit to user
III.4.2. Langkah-langkah Penelitian
Keterangan dari diagram alir penelitian di atas adalah sebagai berikut: 1. Membuat kumparan (Njj)
Pada tahap ini dilakukan pembuatan kumparan yang bekerja sebagai sensor magnet dengan variasi jumlah lilitan (N), diameter tampang lintang kumparan (d) dan bahan untuk inti kumparan. Kumparan terbuat dari bahan akrilik dengan jumlah total sembilan berupa JJ_750K, JJ_1500K, JJ_3000K, JJ_750B, JJ_1500B, JJ_3000B, JJ_750F, JJ_1500F, dan JJ_3000F.
2. Membuat rangkaian integrator dan penguat non inverting
Kedua rangkaian ini dibuat sebagai sistem pengolah sinyal dalam teslameter JJ. Berikut gambar yang menunjukkan rangkaian integrator beserta penguat non inverting.
C = 330 nF -+ R1 = 1 KΩ -+ OP 07 Vo int R2 = 1 KΩ OP 07 R3 = 1 KΩ Vo akhir Vi
Gambar 3.5 Rangkaian integrator dengan penguat non inverting Bagian pertama adalah integrator sebagai awal pengolah sinyal.
Integrator berguna untuk mengintegralkan nilai dB/dt menjadi B sehingga
pada multimeter nilai B dapat teramati secara langsung setelah proses kalibrasi. Rancangan rangkaian integrator yang digunakan dalam penelitian menggunakan IC tipe OP 07, R1 sebesar 1KΩ, dan C sebesar 330 nF jenis tantalum.
Pemilihan bahan untuk rangkaian sengaja dipilih yang berkualitas untuk menghasilkan rangkaian yang baik. Untuk IC dipilih IC tipe OP 07
commit to user
karena impedansinya yang rendah sehingga diperoleh kualitas integrator yang baik. Pada resistor digunakan daya ½ watt dengan mempertimbangkan daya yang dialirkan ke rangkaian tidak terlalu besar. Sedangkan pada komponen kapasitor dipilih jenis tantalum karena jenis ini mempunyai kualitas baik dan tingkat kestabilan tinggi. Sebagai indikator apakah
integrator bekerja dengan baik, rangkaian diberi masukan gelombang kotak.
Apabila sinyal keluaran berupa hasil integralnya yakni gelombang segitiga, maka integrator dapat mengintegralkan dB/dt menjadi B (Gayakwad, 2000).
Selain integrator, dalam penelitian ini juga digunakan penguat non
inverting. Penguat non inverting digunakan untuk mengatur besarnya
penguatan sinyal sebelum masuk ke voltmeter. Rancangan rangkaian penguat
non inverting yang akan digunakan berupa R2 sebesar 1KΩ ½ watt dan R3
sebesar 1KΩ tipe potensio. Penggunaan R3 tipe potensiometer dimaksudkan agar pengukur dapat dengan bebas menentukan penguatan yang diinginkan dengan batasan nilai R3 maksimal 1KΩ. Pada penguat non inverting dilakukan pengujian rangkaian dengan sinyal masukan berupa gelombang sinusoidal dari Function Generator, dan keluarannya dapat dilihat dari osiloskop dengan hasil penguatan tanpa ada perubahan fase.
Secara prinsip penguat non inverting dapat ditempatkan sebelum
integrator. Namun, karena adanya pertimbangan derau atau noise yang
muncul dari kumparan dan bisa ikut terkuatkan sebelum diintegrasikan, maka penguat non inverting berada setelah integrator (Oguey, 1960).
3. Merangkai kumparan dengan rangkaian integrator dan penguat non inverting, dan voltmeter
Kumparan yang telah dibuat dirangkai dengan integrator, penguat non
inverting, dan voltmeter. Sinyal masukan untuk integrator berasal dari
kumparan, sedang sinyal keluaran dari integrator sebagai masukan untuk penguat non inverting. Sehingga nilai GGL induksi teramati sebagai Vo dari penguat non inverting. Voltmeter inilah yang merupakan display sistem, sehingga nilai Vo dapat teramati secara langsung. Terdapat tambahan display
commit to user
berupa osciloskop untuk mengamati kurva hysterisis. Kumparan dan input rangkaian sengaja diberi socket banana sehingga praktis ketika ingin mengganti dengan variasi kumparan yang lain.
4. Menguji alat menggunakan jenis teslameter JJ_3000B
Pengujian alat dilakukan untuk mengetahui apakah teslameter JJ dapat digunakan untuk mengukur medan magnet atau tidak. Pengujian menggunakan JJ_3000B sebagai kumparan yang mempunyai luasan tampang lintang lebih besar dengan lilitan terbanyak. Hasil yang diperoleh teslameter sudah dapat menunjukkan data yang kemudian dibahas di bab 4, sehingga dapat disimpulkan teslameter JJ telah mampu bekerja sebagai alat ukur medan magnet.
5. Pengambilan data
a. Elektromagnet dihubungkan dengan arus sehingga timbul medan magnet dalam elektromagnet tersebut. Arus yang digunakan adalah 0-4 ampere. b. Kumparan digerakkan ke arah atas - bawah di ruang antara kutub magnet
sambil mencatat nilai tegangan induksi yang terbaca di multimeter. c. Pengambilan data diulang 3 kali dengan variasi posisi seperti
ditunjukkan Gambar 2.5.
d. Pengukuran medan magnet dengan teslameter F.W.B untuk keperluan kalibrasi teslameter JJ.
e. Data yang diperoleh dari kedua teslameter dapat dibandingkan sehingga diperoleh persamaan polinomial pangkat 3 untuk menunjukkan nilai medan magnet langsung dari teslameter JJ.
6. Hasil data
Hasil data pada penelitian ini berupa tegangan induksi V pada arus 0-4 ampere. Setelah dikalibrasi dengan teslameter F.W.B, selanjutnya data dari teslameter JJ langsung berupa nilai medan magnet.
7. Kalibrasi Alat
Pada penelitian ini kalibrasi alat dilakukan dengan cara membandingkan hasil ukur teslameter JJ dengan hasil ukur teslameter F.W.B, dengan catatan digunakan untuk mengukur obyek yang sama. Kedua data
commit to user
yang diperoleh dapat dibandingkan sehingga diperoleh persamaan polinomial pangkat 3. Jadi pada pengukuran selanjutnya, nilai medan magnet bisa langsung teramati dari teslameter JJ.
8. Pengolahan dan Interprestasi data
Pengolahan data dilakukan dengan bantuan software Origin Pro 8.0 yang diinterprestasikan dalam bentuk grafik. Hal ini memudahkan untuk mengetahui apakah teslameter bekerja dengan baik atau tidak.
commit to user
BAB IV
HASIL DAN PEMBAHASAN
IV.1 Karakteristik Teslameter JJ
Teslameter JJ yang telah dibuat merupakan alat ukur medan magnet yang bekerja berdasarkan metode induksi. Terdiri dari tiga bagian yaitu kumparan sebagai sensor magnetik, rangkaian integrator dan non inverting sebagai sistem instrumentasi, dan display sistem berupa voltmeter. Berikut ini akan dibahas mengenai karakteristik dari masing-masing bagian teslameter JJ.
IV.1.1 Kumparan (sensor magnetik)
Ketika kumparan digerakkan ke arah atas – bawah di ruang antara kutub magnet, maka pada ujung kawat kumparan akan timbul tegangan. Sesuai dengan hukum Faraday, tegangan ini adalah hasil dari induksi yang diberikan oleh elektromagnet yang dikenal GGL induksi. Hal inilah yang menjadi karakteristik dari sensor magnetik. Inti dari metode induksi adalah adanya perubahan fluks magnetik. Oleh karena itu penggunaan teslameter JJ dengan cara menggerakkan kumparannya ke atas ke bawah antara ruang kutub magnet.
IV.1.2. Rangkaian Integrator
Karakteristik utama dari rangkaian integrator adalah mengintegrasikan fungsi gelombang dari sinyal masukan dengan adanya pembalikan fase sebesar 90° antara sinyal keluaran dan masukan. Integrator dalam teslameter JJ telah terbukti dapat bekerja dengan baik, dimana sinyal masukan dari JJ_3000B mampu dibalikkan sebesar 90°. Jika integrator langsung dihubungkan dengan kumparan, maka besarnya tegangan keluaran integrator sesuai persamaan (2.11) yang ditentukan oleh luas tampang lintang, jumlah lilitan kumparan, intensitas medan magnet, serta nilai kapasitor dan hambatan yang digunakan. Jadi semakin besar luas tampang lintang kumparan dan semakin banyak jumlah lilitan, maka nilai tegangan dari integrator juga akan semakin besar. Karakteristik integrator dalam teslameter JJ dapat dilihat di lampiran B.
commit to user
IV.1.3. Rangkaian Penguat Non Inverting
Karakteristik penguat non inverting yang diambil pada teslameter JJ menggunakan sinyal masukan dari JJ_3000B. Rangkaian ini telah mampu menunjukkan kerja yang baik, karena sinyal keluaran telah mengalami penguatan dengan fase yang sama. Hal ini sesuai dengan teori, yaitu tidak adanya perubahan fase antara gelombang masukan dan gelombang keluaran (Putra, 2002). Karakteristik penguat non inverting pada teslameter JJ dapat dilihat di lampiran B.
IV.2 Unjuk Kerja Teslameter JJ IV.2.1. Pengujian Alat
Sebelum digunakan pada pengambilan data, terlebih dahulu dilakukan pengujian alat dengan cara teslameter JJ digunakan untuk mengukur medan magnet dari elektromagnet yang dialiri arus. Hal ini dilakukan untuk memastikan bahwa teslameter JJ yang dibuat telah dapat beroperasi. Pengujian alat dilakukan dengan JJ_3000B dengan data ditunjukkan di lampiran A (Tabel A.6).
Berdasarkan Tabel A.6, dapat dilihat ketika tidak ada arus yang dialirkan ke elektromagnet, pada teslameter F.W.B sudah menunjukkan 0,0034 tesla dan teslameter JJ menunjukkan 0,0165 volt. Hal tersebut kemudian dianggap sebagai ralat, sehingga semua hasil harus dikoreksi. Jadi semua data yang ditampilkan dalam analisa menggunakan data dikoreksi. Hasil pengujian alat dalam bentuk grafik terlihat pada Gambar 4.1.
Dari Gambar 4.1 terlihat perubahan intensitas medan magnet sebanding dengan tegangan induksi yang dihasilkan oleh teslameter JJ. Tegangan induksi akan semakin besar seiring bertambahnya arus yang masuk dalam elektromagnet. Agar diperoleh hasil pengujian yang maksimal, pengambilan data menggunakan variasi posisi seperti ditunjukkan pada Gambar 2.3. Jadi dapat dikatakan bahwa teslameter JJ telah dapat beroperasi menggunakan prinsip hukum Faraday untuk menghasilkan tegangan induksi.
commit to user
Gambar 4.1 Grafik pengujian alat dengan JJ_3000B
IV.2.2. Pengukuran Medan Magnet
Setelah melakukan pengujian alat dan ditemukan bahwa teslameter JJ dapat digunakan untuk mengukur medan magnet pada elektromagnet, unjuk kerja berikutnya adalah pengukuran medan magnet guna pengambilan data. Arus yang digunakan mulai dari arus minimum hingga arus maksimum yang dibolehkan untuk elektromagnet, yaitu antara 0 – 4 ampere. Sebelumnya dilakukan pengukuran medan magnet dengan teslameter F.W.B untuk kalibrasi teslameter JJ, yang hasilnya dapat dilihat pada Gambar 4.2.
Gambar 4.2 menunjukkan ketika pengukuran medan magnet di posisi A diperoleh nilai medan magnet yang tidak jauh berbeda dengan posisi C. Namun ketika pengukuran berada posisi B, kenaikan nilai medan magnet tidak terlalu signifikan layaknya pada dua posisi sebelumnya. Hal ini tidak terlalu menjadi masalah karena pada intinya hasil pengukuran telah menunjukkan kesesuaian dengan teori. Terlihat besar medan magnet akan bertambah seiring dengan bertambahnya arus yang diberikan. Dengan demikian teslameter F.W.B layak digunakan sebagai kalibrator pada teslameter JJ.
0 1 2 3 4 0.00 0.02 0.04 0.06 0.08 0.10 0.12 0.14 0.16 Teslameter F.W.B posisi A posisi B posisi C Arus (ampere) Teslameter F.W .B (tesla) 0.00 0.01 0.02 0.03 0.04 0.05 0.06 0.07 Teslameter JJ (volt )
commit to user
Gambar 4.2 Grafik pengukuran medan magnet dengan teslameter F.W.B Setelah diperoleh data pengukuran medan magnet dengan teslameter F.W.B, kemudian dilakukan pengukuran medan magnet oleh teslameter JJ. Pengukuran ini dilakukan tiga kali dengan tujuan agar diperoleh data yang lebih valid. Dari setiap kumparan yang digunakan, nantinya akan diperoleh nilai kalibrasi dan sensitivitas yang berbeda-beda tiap kumparannya.
IV.2.2.1. Variasi Jumlah Lilitan (N)
Untuk mengetahui pengaruh jumlah lilitan terhadap tingkat sensitifitas JJ, dibuat 3 variasi jumlah lilitan sensor yaitu 750, 1500, dan 3000. Pengaruh jumlah lilitan terhadap tegangan induksi yang dihasilkan dapat dilihat dengan mengambil sampel salah satu kumparan yakni kumparan dengan luas tampang lintang berupa pipa berdiameter 1,4 cm, seperti ditunjukkan pada Gambar 4.3.
Berdasarkan Gambar 4.3, dapat teramati secara langsung mengenai tingkat linieritas sensor terhadap perubahan medan magnet untuk setiap jenis teslameter JJ. Dimulai dari JJ_750B, terlihat belum memperlihatkan sifatnya sebagai sebuah sensor karena belum terlihatnya respon linier. Saat jumlah lilitan dilipat gandakan, JJ_1500B mampu memperlihatkan sifat yang lebih linier daripada JJ_750B. Hal
0 1 2 3 4 0.00 0.02 0.04 0.06 0.08 0.10 0.12 0.14 0.16 Posisi A Posisi B Posisi C Teslameter F.W .B (tesla) Arus (ampere)
commit to user
yang sama juga terjadi, dimana JJ_3000B mempunyai respon linier yang jauh lebih bagus daripada JJ_1500B.
Gambar 4.3 Grafik variasi N terhadap teslameter F.W.B
Ditinjau dari GGL induksi yang diperoleh, secara urut mulai dari JJ_750B, JJ_1500B dan JJ_3000B adalah 0,04 volt; 0,06 volt; dan 0,075 volt. Dari ketiga jenis tersebut, kembali diperoleh JJ_3000B yang mempunyai nilai maksimum GGL induksi. Hal ini telah sesuai dengan teori, dimana jumlah lilitan akan berpengaruh langsung terhadap nilai GGL induksi yang diperoleh. Semakin banyak jumlah lilitan, GGL induksi yang mampu dihasilkan juga akan semakin tinggi (Persamaan (2.6)). Dalam variasi jumlah lilitan, diperoleh kumparan dengan jumlah lilitan 3000 yang paling sensitif dan layak sebagai sensor.
IV.2.2.2. Variasi Bahan dan Diameter (d) untuk Inti Kumparan Selain variasi jumlah lilitan, terdapat juga variasi bahan untuk inti kumparan berupa penambahan bahan magnet (ferit). Untuk mengetahui pengaruh luasan tampang lintang kumparan, digunakan 2 pipa plastik dengan diameter
0 1 2 3 4 0.00 0.02 0.04 0.06 0.08 0.10 0.12 0.14 0.16 Teslameter F.W.B JJ_750B JJ_1500B JJ_3000B Arus (Ampere) Teslameter F.W .B (Tesla) 0.00 0.01 0.02 0.03 0.04 0.05 0.06 Teslameter JJ (Vo lt)
commit to user
berbeda yaitu 0,9 cm dan 1,4 cm. Dengan mengambil jumlah lilitan 3000, hasilnya dapat ditunjukkan pada Gambar 4.4.
Gambar 4.4 menunjukkan bahwa adanya variasi bahan sebagai inti kumparan mempengaruhi besar tegangan induksi yang diperoleh. Karena kumparan dengan inti berupa ferit menjadi lebih linier. Hal ini disebabkan karakteristik ferit yang merupakan bahan magnet kuat dari golongan feromagnetik kelas ferimagnetik (Buck dan Hayt, 2006). Oleh karena itu penambahan ferit sebagai inti kumparan akan meningkatkan kinerja sensor dalam hal besarnya GGL induksi hasil pengindera maupun linieritas sensor.
Berdasarkan karakteristik tersebut, seharusnya sensor dengan inti ferit merupakan sensor yang paling baik kinerjanya. Hal ini teramati dari sensitivitas sensor hasil penelitian ini. Apabila respon sensor terhadap medan ditinjau secara linier, maka slope dari kurva akan menunjukkan sensitivitasnya dalam satuan volt/tesla. Hasil perhitungan menunjukkan bahwa JJ_3000F memiliki slope 0,47689 sehingga dapat disebutkan bahwa JJ_3000F memiliki tingkat sensitif sebesar 0,47689 volt/tesla.
Gambar 4.4 Grafik variasi bahan dan d terhadap teslameter F.W.B
0 1 2 3 4 0.00 0.02 0.04 0.06 0.08 0.10 0.12 0.14 0.16 Teslameter F.W.B JJ_3000K JJ_3000B JJ_3000F Arus (Ampere) Teslameter F.W .B (tesla) 0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 Teslameter JJ (volt )
commit to user
IV.3. Sensitivitas Sensor dan Kurva Hysterisis
Peristiwa hysterisis adalah respon bahan magnetik terhadap medan magnet, sehingga untuk mengkonfirmasi sensitivitas teslameter JJ perlu dilakukan pengukuran kurva hysterisis. Hysterisis terjadi saat medan tidak tetap diberikan pada bahan magnetik dalam kumparan pencuplik yang dilingkupi kumparan pengimbas, sehingga timbul GGL induksi pada ujung-ujung kumparan pencuplik sebagai akibat perubahan induksi magnet. Dalam hal ini medan diuraikan hingga maksimum kemudian diturunkan hingga nol dan dibalik arahnya hingga maksimum. Selanjutnya dinaikkan kembali hingga nol dan diteruskan hingga maksimum arah positif yang membentuk sebuah siklus. Kumparan yang bekerja sebagai sensor merupakan kumparan pencupliknya, sedangkan untuk kumparan pengimbas adalah elektromagnet. Dengan perubahan medan magnet tersebut, maka respon GGL induksi akan membentuk loop tertutup yang disebut kurva hysterisis.
Gambar 4.5 Grafik perbandingan N pada sensor dengan inti ferit Berdasarkan uraian sebelumnya diperoleh data bahwa sensor dengan inti kumparan ferit merupakan jenis teslameter JJ yang paling sensitif. Hal ini dapat
0 1 2 3 4 0.00 0.02 0.04 0.06 0.08 0.10 0.12 0.14 0.16 Teslameter F.W.B JJ_750F JJ_1500F JJ_3000F Arus (Ampere) Teslameter F.W .B (Tesla) 0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 Teslameter JJ (Vo lt)
commit to user
dilihat melalui data dalam bentuk grafik pada Gambar 4.5 untuk variasi jumlah lilitan, yang kemudian dapat dikonfirmasi melalui kurva hysterisis (Gambar 4.6). Gambar 4.5 menunjukkan sebagaimana bagian sebelumnya, dimana kumparan dengan jumlah lilitan terbanyak memiliki tingkat sensitifitas yang lebih. Dengan meninjau respon sensor secara linier, diperoleh nilai slope dalam satuan volt/tesla secara urut untuk JJ_750F; JJ_1500F; dan JJ_3000F adalah 0,49564; 0,51894; dan 0,47689. Sehingga diperoleh respon terhadap medan magnet semakin sensitif, seiring penambahan jumlah lilitan. Namun pada lilitan 3000 slopenya bernilai rendah karena terdapat kondisi optimum pada suatu sensor yakni dalam keadaan jenuh. Hal ini akan lebih jelas ditunjukkan pada kurva hysterisis.
(a) (b)
(c)
commit to user
Respon data bentuk kurva hysterisis dari ketiga sensor di atas dapat di rangkum pada Gambar 4.6 yang diambil pada arus 0,3 ampere. Terlihat kurva
hysterisis semakin menunjukkan bagian sisi yang linier. Hal lain yang dapat
diamati adalah luasan kurva yang semakin sempit, yang menunjukkan medan magnet yang hilang selama proses. Luasan kurva yang lebar menunjukkan bahwa sensor tersebut tidak sensitif.
Berdasarkan teori, kurva hysterisis yang mempunyai luasan sekecil mungkin adalah yang sesuai untuk aplikasi sensor magnetik. Meski tidak ditemukan sensor dengan kurva hysterisis yang sesuai teori, tetapi dapat diamati bahwa semakin banyak lilitan maka luasan kurva semakin sempit dan terdapat sisi yang linier. Bagian inilah yang dapat diaplikasikan sebagai sebuah sensor. Terlihat pada JJ_750F belum menunjukkan kurva hysterisis karena masih mampu menyimpan medan magnet eksternal, sehingga mempunyai luasan sangat lebar. Hanya pada JJ_1500F dan JJ_3000F yang dapat menunjukkan respon sensor dengan mempunyai nilai optimasi medan magnet yaitu 0,1287 tesla untuk JJ_1500F dan 0,1001 tesla untuk JJ_3000F. Setelah mencapai nilai tersebut, sensor akan berada pada keadaan jenuh dari kurva hysterisis. Berdasarkan uraian tersebut, diperoleh JJ_3000F yang lebih sensitif daripada JJ_750F maupun JJ_1500F.
IV.4. Kalibrasi Alat
Kalibrasi pada teslameter JJ dengan metode eksperimental menggunakan bantuan dari teslameter yang telah terkalibrasi sebelumnya (kalibrator). Sebagai kalibrator adalah teslameter F.W.B. Kalibrasi dilakukan dengan cara membuat kesebandingan data yang diperoleh dari pengukuran obyek yang sama yaitu elektromagnet.
Nilai medan magnet dari teslameter JJ dapat diperoleh melalui persamaan garis dari grafik yang menghubungkan antara tegangan induksi teslameter JJ dengan medan magnet dari teslameter F.W.B. Berikut keterangan untuk masing-masing jenis persamaan yang kemudian ditemukan persamaan polinomial orde 3 sebagai persamaan kalibrasi. Kalibrasi alat menggunakan jenis teslameter JJ yang
commit to user
paling sensitif yaitu JJ_3000F. Grafik yang diperoleh ditunjukkan pada Gambar 4.7 disertai dengan jenis persamaan dan tingkat liniernya (R2). Garis merah merupakan kurva persamaan dari grafik tersebut.
y = 0,47689x + 0,0043 R2 = 0, 0,99645 (a) y = - 0,20452x2 + 0,54153x + 0,00117 R2 = 0,9977 (b) 0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.00 0.02 0.04 0.06 0.08 0.10 0.12 0.14 0.16 Teslameter F.W .B (tesla) Teslameter JJ (volt) 0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.00 0.02 0.04 0.06 0.08 0.10 0.12 0.14 0.16 Teslameter F.W .B (tesla) Teslameter JJ (volt)