INTISARI
Dalam penelitian ini dibuat alat bantu berjalan bagi penyandang tunanetra berupa rompi dan tongkat yang dilengkapi dengan sensor pendeteksi jarak ultrasonic. Selain itu, terdapat rangkaian pemutar suara yang dapat dimanfaatkan oleh penyandang tunanetra untuk memberitahu seberapa jauh jarak benda yang ada di depan dan di samping.
Alat ini memiliki keluaran berupa suara yang berasal dari sebuah IC suara ISD2590. Komponen IC ini memuat perangkat tambahan untuk proses perekaman dan pemutaran suara. Salah satu perangkat alat ini adalah penguat atau amplifier untuk speaker sehingga tidak memerlukan rangkaian tambahan untuk penguat speaker. Suara yang dihasilkan oleh alat ini merupakan jarak yang terdeteksi oleh sensor yang terpasang pada rompi dan tongkat. Sistem ini telah dicoba untuk mendeteksi benda yang berada di depan dan disamping pengguna alat ini. Hasil dari percobaan yang sudah dilakukan suara yang keluar dari alat ini sudah sesuai dengan jarak yang terdeteksi oleh sensor yang dipasang pada rompi maupun sensor yang dipasang pada tongkat. Hasil pengukuran jarak memiliki error rata-rata sebesar 0,58% untuk sensor yang dipasang pada rompi dan 0,49% untuk sensor yang dipasang pada tongkat.
ABSTRACT
In this study is made for walking tools for people with a blind person in the form of a vest and a stick furnished with ultrasonic sensor proximity. In addition, there are a series of player sound that could be used by people with a blind person to tell how far the distance of objects which was in front and on the side.
This tool has an output in the form of sound derived from a sound device ISD2590. The CMOS component has additional devices to process of recording and playback of sound. One of these devices is the amplifier to the speaker so that it does not require additional circuits for the amplifier speakers. The sound produced by these tools is the distance that is detected by a sensor attached to a vest and a stick.
This system had already attempted to detect any object that is located in front of and besides users of these tools. The result of the experiment has conducted, the sound out of this instrument is in accordance with the distance detected by the sensors that are mounted on a vest and sensors that are mounted on a stick. The distance measurement has error average of 0.58% for sensor that are mounted on vest, and 0.49% for sensor mounted on stick.
i
TUGAS AKHIR
PIRANTI PENUNTUN PENYANDANG TUNANETRA DENGAN
INDIKASI JARAK BERBASIS ARDUINO
Diajukan untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh :
FELIKS ANGGIE PURWOKO
115114015
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
FINAL PROJECT
GUIDING DEVICE FOR BLIND PEOPLE WITH DISTANCE
INDICATION BASED ON ARDUINO
Presented as Partial Fulfillment of the Requiements
To Obtain Sarjana Teknik Degree
In Electrical Engineering Study Program
FELIKS ANGGIE PURWOKO
115114015
ELECTRICAL ENGINEERING STUDY PROGRAM
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
I{ALAMAN
PERSETUruA}.I
TUGAS AKHIR
PIRANTI
PEI\IT}NTTINPEI\IYAI{DAI\IG
TUNAI\TETRADENGAI\I
${I}IKASI
JARAK
BERBASIS
ARI}IIINO
GTIIDING DEVICE
FOR
BLIND
PEOPLE
W
TH DISTAI\TCE
INDICATION
BASED
ONARDtItr{O
Pembimbing
It
[b**;
zcsrcrllt
1&
ffi*h
ffirro'"Nff,"*,r"rq
fffiE
4ffiS
q"Gu**?
Ketua
Sekretaris :
}IALAMAN
PENGESff{If$
TUGAS
AKI{IR
PIRANTI
PEI\TUNTTIN PEI\TYAITDANGTTINANETRA
DENGAI\T$II}IKAST JARAK-BERBASIS ARDUINO
GTIII}BIG
DEYICE
FOR
BLII\IE
PEOPLE
WITII
DISTAhICE
IFTDICATION
BASEDON
ARI}UINO
Tandatangan
\\tr,,
l{
ffi
Yogyakartq 13 Februari 2014 Fakultas Sains dan Teknologi
Oleh:
FELIKS ANGGIE PURWOKO
1 151 14015
Telatr dipertahankan di depan panitia penguji
P ada tanggal
2l
J artuan 20 1 4Dan dinyatakan memenuhi syarat
Sustrnan Panitia Penguji :
Nama Lengkap
Petrus
ffioPmbowq
S.T., M.T,B. Wuri Harini, S.T.,
*LT.
Anggota
:
Mrttnto,
$.T., M.T.Iv
PtsRNYATAAN
KEASLIAN
KARYA
Sqn*u€,n:mtalsm dengp ssrmggukrya hhwa trgss
&irfui tiffi
wmuat kr)ne ataubagiekryaonmg lain, kecuatiymgtelahdisebutkmdalm*utipmfudaffarpustakasebagaimlra la)rdrrya karJna
itriah.
Yogyakartq 30 Jadrrtri 2014
vi
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP
Motto :
Kesuksesan selalu disertai dengan
kegagalan
Skripsi ini saya persembahkan untuk…..
Tuhan Yesus Kristus yang selalu Melimpahkan
Berkat-Nya kepadaku
LEMBAR PERNYATAAN
PERSETUJUAN
PUBLIKASI
I(ARYA
ILMIAH
UNTUI(
KEPENTINGAN
AKADEMIS
Yang bertanda taryan di baunatr ini, saya nmhreiswa Universitas Sarata Dhmrra :
Nama
Nomor Mahasiswa
:
Feliks Anggie Purwoko:
115114015Demi pengembangan ilmupengetahuan, saya memberikankepadaperpustakaan Universitas
sanata Dhar:na karyailmiah safa yangberjudul :
PIRANTI
PEIYUNTUN PEI\TYAI\IDAIYG TT]NAI\Tf,TRA DBNGAN
IhIDIKASI JARAK
BERBASIS
ARDUINO
Deqgan demikian saya memberikan-kepada Perpmtakam Universitas Smata Dhrma hak untuk menyimpan, mengalihkan dalam bentuk media lain, mengelolaaya dalarn bentuk
pmgkalan data, mendistribusikan serara tertatas, .danmempublihsikannya di internet atau
media lain untuk kepentingan akademis tanpa perlu merninta
ljin
dari saya maupun memberikan royalty kepada mya selanra teEpme,ncantunkan ilama saya sebagi prcmlis:Demikianpernyataan iniyang saya butt dengan sebenamya
Yogyakarta, 30 Januari 2014
Felits Anggie Purwoko
viii
INTISARI
Dalam penelitian ini dibuat alat bantu berjalan bagi penyandang tunanetra berupa rompi dan tongkat yang dilengkapi dengan sensor pendeteksi jarak ultrasonic. Selain itu, terdapat rangkaian pemutar suara yang dapat dimanfaatkan oleh penyandang tunanetra untuk memberitahu seberapa jauh jarak benda yang ada di depan dan di samping.
Alat ini memiliki keluaran berupa suara yang berasal dari sebuah IC suara ISD2590. Komponen IC ini memuat perangkat tambahan untuk proses perekaman dan pemutaran suara. Salah satu perangkat alat ini adalah penguat atau amplifier untuk speaker sehingga tidak memerlukan rangkaian tambahan untuk penguat speaker. Suara yang dihasilkan oleh alat ini merupakan jarak yang terdeteksi oleh sensor yang terpasang pada rompi dan tongkat. Sistem ini telah dicoba untuk mendeteksi benda yang berada di depan dan disamping pengguna alat ini. Hasil dari percobaan yang sudah dilakukan suara yang keluar dari alat ini sudah sesuai dengan jarak yang terdeteksi oleh sensor yang dipasang pada rompi maupun sensor yang dipasang pada tongkat. Hasil pengukuran jarak memiliki error rata-rata sebesar 0,58% untuk sensor yang dipasang pada rompi dan 0,49% untuk sensor yang dipasang pada tongkat.
ix
ABSTRACT
In this study is made for walking tools for people with a blind person in the form of a vest and a stick furnished with ultrasonic sensor proximity. In addition, there are a series of player sound that could be used by people with a blind person to tell how far the distance of objects which was in front and on the side.
This tool has an output in the form of sound derived from a sound device ISD2590. The CMOS component has additional devices to process of recording and playback of sound. One of these devices is the amplifier to the speaker so that it does not require additional circuits for the amplifier speakers. The sound produced by these tools is the distance that is detected by a sensor attached to a vest and a stick.
This system had already attempted to detect any object that is located in front of and besides users of these tools. The result of the experiment has conducted, the sound out of this instrument is in accordance with the distance detected by the sensors that are mounted on a vest and sensors that are mounted on a stick. The distance measurement has error average of 0.58% for sensor that are mounted on vest, and 0.49% for sensor mounted on stick.
KATA
PENGANTAR
Puji dan syutur kepada Tuhan Yesus Kristus atas segala ralmal dan karunia-Nya sehingga tugas akhir dengan
judul
"Piranti Pentxrtun Penyandang Tunanetra DenganIndikasi JarakBerbasis Arduino" ini dapat diselesaikan danganbaik.
Selanra menulis tugas akhir ini, penulis menyadari b*lwa ada begitu banyak phak
ymg telahmembsrikm bantuan dan dukungan dangan carilrya masing-masing sehingga
tugas akhir,ini dapat diselesaikan. Oleh karena itu penulis ingin rnengucapkan torima kasih kepada:
1.
Lbu Bernadeta Wuri Harini S.T., M.T. selaku dosen penrbimbing yang telah deagan sabar membimbingdan
mernberi saranyang
membantu penulis datammenyelesaikan tutisan ini.
2.
Seluruh dosen dan laboran Teknik Elekfio yang telah memberikan ifunu dan pengetahuan kepada petulis selama kuliah.3.
Almarhurn bapak, ibu, dan adikku tercirfia atas doa" kesabaran dan dukungan baik secara moril dan materil.4. Teman-teman
Teknik Elektro sekalian terimakasih
ataskerja
sama dansolidaritasnya.
5.
Ternan-ternan kelompok PKM *Rompi Penwffun Penyandang Tunanetra dengan butput Suara" terima kasih atas dukungan dan kerja samanya.6.
Yosephin Andina I.R yang tidak bosan memberikill semangat dan dnkungamya. 7.
Rekan-rekan kust yang selalu mcmberi semangat.Dengan rendatr hati penulis menyadari bahwa tugaas akhir
ini
m-asih jauh darisempurna, oteh karena itu segala kritik dan saran ru*uk perbaikan tugas akhir fud sangat
diharapkan. Akhir kata, semoga tugas akhir id dapat bergrma bagi semua pihak. Terima
kasih.
xi
DAFTAR ISI
HALAMAN JUDUL ... i
HALAMAN JUDUL (Bahasa Inggris) ... ii
LEMBAR PERESETUJUAN ... iii
LEMBAR PENGESAHAN OLEH PENGUJI ... iv
PERNYATAAN KEASLIAN KARYA ... v
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP ... vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS ... vii
INTISARI ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xi
DAFTAR GAMBAR ... xiv
DAFTAR TABEL ... xvi
BAB I PENDAHULUAN ... 1
1.1. Latar Belakang ... 1
1.2. Tujuan dan Manfaat ... 2
1.3. Batasan Masalah ... 2
1.4. Metodologi Penelitian ... 2
BAB II DASAR TEORI ... 5
xii
2.1.1. Perangkat Lunak Arduino ... 6
2.1.1.1 Struktur Program Arduino ... 7
2.1.1.2 Variabel dan Tipe Data ... 8
2.1.1.3 Fungsi ... 8
2.1.2. Mikrokontroler ATmega328 ... 9
2.1.3. Rangkaian Reset ... 11
2.2. Sensor Jarak Ultrasonic PING))) ... 11
2.3. Sound Device ISD2590 ... 13
2.3.1. Konfigurasi Pin pada ISD2590 ... 14
2.3.2. Deskripsi Pin ISD2590 ... 15
BAB III RANCANGAN PENELITIAN ... 17
3.1. Blok Diagram Sistem ... 17
3.2. Perancangan Perangkat Keras ... 18
3.2.1. Board Arduino Uno ... 18
3.2.2. Sound Device ISD2590 ... 19
3.3. Perancangan Perangkat Lunak ... 22
3.4. Proses Record dan Playback ... 25
BAB IV HASIL DAN PEMBAHASAN ... 27
4.1. Implementasi Alat ... 27
4.2. Pengujian Alat ... 31
4.2.1.Pengujian Hasil Rekaman ... 31
xiii
4.2.3.Pengujian Respons Time ... 37
4.2.4. Pengujian Tombol ... 39
4.3. Perangkat Lunak ... 40
BAB V KESIMPULAN DAN SARAN ... 45
5.1. Kesimpulan ... 45
5.2. Saran ... 45
DAFTAR PUSTAKA ... 46
xiv
DAFTAR GAMBAR
Gambar 1.1. Blok Perancangan ... 3
Gambar 2.1. Board Arduino Uno ... 6
Gambar 2.2. Perangkat Lunak Arduino ... 7
Gambar 2.3. Konfigurasi Pin ATmega328 pada Arduino Uno ... 10
Gambar 2.4. Diagram Operasi untuk Reset Eksternal ... 11
Gambar 2.5. Konfigurasi Pin Sensor Ultrasonic PING))) ... 12
Gambar 2.6. Diagram Waktu Sensor Ultrasonic PING))) ... 12
Gambar 2.7. Cara Kerja Sensor Ultrasonic PING))) ... 13
Gambar 2.8. Blok Diagram ISD2560/ISD2590 ... 14
Gambar 2.9. Konfigurasi Pin ISD2560/ISD2590 ... 14
Gambar 3.1. Blok Diagram Sistem ... 17
Gambar 3.2. Rangkaian Board Arduino dengan ATmega328 ... 19
Gambar 3.3. Rangkaian ISD2590 ... 20
Gambar 3.4. Rangkaian Perekam Suara Menggunakan ISD2590 ... 21
Gambar 3.5. Diagram Alir Sistem ... 22
Gambar 3.6. Diagram Alir Pembacaan Sensor ... 23
Gambar 3.7. Diagram Alir Deteksi Benda ... 24
Gambar 3.8. Diagram Alir Proses Merekam Suara ... 25
Gambar 3.9. Diagram Alir Proses Putar Ulang Suara ... 26
xv
Gambar 4.2. Rompi dan Tongkat Penuntun Bagian Luar... 28
Gambar 4.3. Rompi Penuntun Bagian Dalam ... 29
Gambar 4.4. Rangkaian ISD2590 dan ATmega328 ... 30
Gambar 4.5. Pola Sinyal Dari Kata Nol ... 35
Gambar 4.6. Pola Sinyal Dari Kata Satu ... 35
Gambar 4.7. Pola Sinyal Dari Kata Dua ... 35
Gambar 4.8. Pola Sinyal Dari Kata Tiga ... 35
Gambar 4.9. Pola Sinyal Dari Kata Lima ... 35
Gambar 4.10. Pola Sinyal Dari Kata Koma ... 35
Gambar 4.11. Pola Sinyal Dari Kata Meter ... 36
Gambar 4.12. Pola Sinyal Dari Kata Jarak ... 36
Gambar 4.13. Pola Sinyal Dari Kata Lebih ... 36
Gambar 4.14. Pola Sinyal Dari Kata Dari ... 36
Gambar 4.15. Pola Sinyal Dari Kata Hati-hati ... 36
Gambar 4.16. Rangkaian Tombol ... 39
Gambar 4.17. Inisialisasi Input dan Output ... 40
Gambar 4.18. Program Pemilihan Sensor ... 41
Gambar 4.19. Program Pendeteksian Benda ... 41
Gambar 4.20. Program Pembacaan Jarak oleh Sensor ... 42
Gambar 4.21. Program Pemutaran Suara Tiga Meter ... 43
xvi
DAFTAR TABEL
Tabel 2.1. Deskripsi Arduino ... 8
Tabel 2.2. Konfigurasi dan Deskripsi Pin ATmega328 ... 10
Tabel 2.3. Deskripsi Pin ISD2590 ... 15
Tabel 2.3. Deskripsi Pin ISD2590 (lanjutan) ... 16
Tabel 3.1. Alokasi Pin ATmega328 dan Sensor Ultrasonic PING))) ... 18
Tabel 3.2. Alokasi Pin ATmega328 dan ISD2590 ... 18
Tabel 3.3. Alamat Suara pada ISD2590 ... 20
Tabel 4.1. Keterangan Gambar Rompi dan Tongkat Penuntun Bagian Luar ... 28
Tabel 42. Keterangan Gambar Rompi dan Tongkat Penuntun Bagian Dalam ... 29
Tabel 4.3. Keterangan Gambar Rangkaian ISD2590 dan ATmega328 ... 30
Tabel 4.4. Alamat Suara yang Disimpan Dalam ISD2590 ... 32
Tabel 4.5. Suara yang Dihasilkan Ketika Sensor pada Rompi Mendeteksi Benda ... 32
Tabel 4.6. Suara yang Dihasilkan Ketika Sensor pada Tongkat Mendeteksi Benda ... 34
Tabel 4.7. Jarak yang diukur oleh sensor pada rompi dan sensor pada tongkat ... 37
Tabel 4.8. Respons Time Piranti Penuntun Penyandang Tunanetra ... 38
1
BAB I
PENDAHULUAN
1.1.
Latar Belakang
Penglihatan merupakan salah satu aspek penting dalam kehidupan manusia, dan
mata adalah indera yang membantu manusia untuk melihat. Tanpa indera penglihatan,
manusia akan kesulitan dalam melakukan kegiatan terutama untuk mendeteksi
benda-benda di sekitar. Walaupun menggunakan indera peraba, pendeteksian benda-benda-benda-benda di
sekitar tetap tidak efektif dalam menunjang gerak manusia. Tunanetra atau manusia yang
tidak mempunyai kemampuan untuk melihat, membutuhkan suatu alat bantu untuk
berjalan dan mendeteksi benda-benda di sekitar.
Alat bantu yang umumnya digunakan oleh tunanetra adalah tongkat. Fungsi dari
tongkat ini yaitu untuk mendeteksi apakah ada benda atau makhuk hidup lain yang berada
di sekitar penyandang tunanetra. Namun, tongkat yang biasa digunakan oleh penyandang
tunanetra ini tidak dapat mendeteksi keberadaan benda yang berjarak cukup jauh. Tongkat
ini hanya akan mendeteksi benda yang berjarak sesuai dengan panjang tongkat yang
digunakan para penyandang tunanetra. Penyandang tunanetra harus memukul-mukulkan
tongkat agar dapat mengetahui keberadaan benda lain di sekitar. Sebenarnya sudah ada
penelitian lain yang telah dilakukan oleh Apri Setiawan dkk. dan sudah menghasilkan alat
yang bernama ”Blind Sonar” [1]. Prinsip kerja dari alat tersebut adalah membantu para penyandang tunanetra dalam berjalan karena alat ini dilengkapi sensor ultrasonic. Ketika sensor berdekatan dengan barang atau orang dalam jarak sekitar satu meter, maka sensor
akan memberi tanda kepada mikrokontroler agar motor dapat berputar dan menghasilkan
getaran. Hasil getaran yang dirasakan penyandang tunanetra itulah yang digunakan untuk
mengetahui keberadaan barang atau orang dalam jarak sekitar satu meter.
Berangkat dari permasalahan di atas maka muncul gagasan untuk membuat
PIRANTI PENUNTUN PENYANDANG TUNANETRA DENGAN INDIKASI JARAK
BERBASIS ARDUINO sebagai alat bantu untuk berjalan dalam ruangan. Dalam penelitian
ini akan dirancang suatu alat bantu berjalan bagi penyandang tunanetra berupa rompi dan
tongkat yang dilengkapi dengan sensor pendeteksi jarak. Sensor pada rompi berfungsi
sebagai pendeteksi jarak di depan, sedangkan sensor pada tongkat berfungsi sebagai
dapat dimanfaatkan oleh penyandang tunanetra untuk memberitahu seberapa jauh jarak
benda yang ada di depan dan di samping.
Alat ini memiliki keluaran berupa suara yang berasal dari sebuah IC suara
ISD2590. Komponen IC ini sudah memuat perangkat tambahan untuk mempermudah
proses perekaman dan pemutaran suara. Salah satu dari perangkat tersebut adalah penguat
atau amplifier untuk speaker sehingga tidak memerlukan rangkaian tambahan untuk penguat speaker. Suara yang akan dihasilkan oleh alat ini merupakan jarak yang terdeteksi oleh sensor yang terpasang pada rompi dan tongkat.
1.2.
Tujuan dan Manfaat Penelitian
Tujuan dari penelitian ini adalah menghasilkan suatu alat yang dapat digunakan
para penyandang tunanetra untuk berjalan dalam ruangan.
Manfaat dari penelitian ini adalah memudahkan penyandang tunanetra berjalan
dalam ruangan, serta membantu penyandang tunanetra dalam mendeteksi benda-benda
yang berada di depan mereka, sehingga mereka akan tetap aman saat berjalan.
1.3.
Batasan Masalah
Batasan Masalah dari penelitian ini adalah :
a. Menggunakan dua buah sensor jarak ultrasonic PING))) sebagai pendeteksi jarak. Jarak maksimal deteksi sensor adalah 300cm.
b. Sensor jarak ultrasonic dipasang pada rompi dan tongkat. c. Menggunakan komponen IC suara ISD2590.
d. Keluaran alat ini berupa suara yang telah direkam sebelumnya. Suara yang
direkam adalah berupa jarak dengan interval 50cm.
e. Menggunakan rompi yang dipasang sensor ultrasonic PING))) sebagai pendeteksi jarak objek di depan.
f. Menggunakan tongkat yang dipasang sensor ultrasonic PING))) sebagai pendeteksi jarak objek di samping kanan dan kiri.
1.4.
Metodologi Penelitian
a. Studi Pustaka
Studi pustaka dilakukan dengan mengumpulkan referensi dan informasi dari
literatur-literatur antara lain buku-buku penunjang, datasheet dan referensi dari internet. Mempelajari dasar-dasar teori dari sensor ultrasonic dan IC suara
ISD2590.
b. Perancangan subsistem hardware dan software
Tujuan dari tahapan ini adalah merancang dan mencari model dari sistem
yang akan dibuat. Perancangan tersebut mempertimbangkan segala aspek agar
sistem dapat berjalan dengan optimal. Gambar 1.1 berikut ini merupakan diagram
blok dari sistem secara keseluruhan.
Gambar 1.1 Blok Perancangan
c. Pembuatan sistem hardware dan software
Berdasarkan gambar 1.1 data dari sensor ultrasonic kemudian diolah oleh sebuah mikrokontroler. Dalam sistem ini mikrokontroler yang digunakan adalah
Arduino. Data yang sudah diolah mikrokontroler kemudian dikirimkan ke IC
suara ISD2590 untuk dikonversi menjadi suara yang akan dikeluarkan melalui
sebuah earphone. Suara yang dikeluarkan merupakan jarak dari hasil pembacaan sensor ultrasonic.
d. Pengujian alat
Pengujian alat ini dilakukan dengan tujuan untuk mengetahui apakah sistem
yang dibuat dapat bekerja sesuai dengan yang diharapkan. Pengujian alat
dilakukan dengan cara memberi penghalang di depan sensor pendeteksi jarak.
Penghalang diletakkan di depan sensor mulai dari jarak 50cm sampai dengan Sensor
Ultrasonic 2 Sensor
Ultrasonic 1 Mikrokontroler
ISD2590 Speaker
jarak maksimal deteksi sensor yaitu 300cm. Interval jarak pemasangan
penghalang satu dengan penghalang lain adalah sebesar 50cm. Fungsi yang perlu
diperhatikan adalah suara yang dikeluarkan apakah sudah sesuai dengan jarak
yang terdeteksi oleh sensor.
e. Analisa dan kesimpulan dari pengujian
Membandingkan hasil pengujian sistem dengan perancangan atau teori yang
dibuat. Penyimpulan hasil percobaan dilakukan dengan melihat hasil persentase
keberhasilan sistem. Indikator keberhasilan sistem yang sudah dibuat adalah
5
BAB II
DASAR TEORI
Bab ini menjelaskan tentang teori dan komponen-komponen utama yang mendasari sistem “PIRANTI PENUNTUN PENYANDANG TUNANETRA DENGAN INDIKASI JARAK BERBASIS ARDUINO”. Komponen-komponen yang digunakan
adalah sensor jarak ultrasonic PING))), Sound Device ISD2590 dan Arduino Uno.
2.1.
Arduino Uno
Arduino merupakan sebuah platform elektronik yang open souce, berbasis pada software dan hardware yang fleksibel dan mudah digunakan, yang ditujukan untuk para seniman, desainer, hobbies dan setiap orang yang tertarik dalam membuat objek atau lingkungan yang interaktif [2]. Kelebihan Arduino dari platform hardware mikrokontroler lain adalah [2]:
1. IDE Arduino merupakan multiplatform, yang dapat dijalankan di berbagai sistem operasi, seperti Windows, Mac OS, dan Linux.
2. IDE Arduino dibuat berdasarkan pada IDE processing yang sederhana sehingga mudah digunakan.
3. Pemrograman Arduino menggunakan kabel yang terhubung dengan port USB, bukan port serial. Fitur ini berguna karena banyak komputer yang sekarang ini tidak memiliki port serial.
4. Arduino adalah hardware dan software open source, artinya setiap orang dapat mengunduh software dan gambar rangkaian Arduino tanpa harus membayar ke produsen Arduino.
5. Proyek Arduino ini dikembangkan dalam lingkungan pendidikan , sehingga
bagi pemula akan lebih cepat dan mudah mempelajari.
6. Memiliki begitu banyak pengguna dan komunitas di internet yang dapat
membantu setiap kesulitan yang dihadapi.
Arduino memiliki berbagai macam versi dan salahnya adalah versi Arduino Uno.
Arduino Uno adalah sebuah perangkat keras dari Arduino berupa sistem minimum dengan
mikrokontroler ATmega168/ATmega328 [3]. Perangkat Arduino Uno memiliki 14 pin
digital untuk input dan output dimana 6 pin diantaranya dapat digunakan sebagai output
Pulse Width Modulation (PWM), 6 pin input analog, kristal osilator 16MHz, jack power, ICSP header, tombol reset [3]. Arduino Uno memiliki sejumlah fasilitas untuk berkoneksi dengan perangkat komputer, board Arduino lain, atau mikrokontroler lainnya. ATmega328 menyediakan Universal Synchronous and Asynchonous Serial Receiver and Transmiter (UART) yang tersedia di pin digital 0 (RX) dan 1 (TX) [3]. Sebuah chip ATmega16U2 digunakan untuk komunikasi serial lewat USB dan sebagai port virtual com untuk perangkat lunak pada komputer.
Gambar 2.1 Board Arduino Uno [3]
2.1.1.
Perangkat Lunak Arduino
Arduino Uno dapat diprogram menggunakan perangkat lunak Arduino seperti
pada gambar 2.2. Ada tiga bagian utama dalam bahasa pemrograman Arduino, yaitu
Gambar 2.2 Perangkat lunak Arduino
2.1.1.1.
Struktur Program Arduino
1. Kerangka Program
Kerangka Program arduino sangat sederhana terdiri dari dua blok.
Blok pertama adalah void setup(), dan blok kedua adalah void loop(). Blok void setup() merupakan bagian inisialisasi program yang berisi kode program yang hanya dijalankan sekali sesaat setelah Arduino dihidupkan
atau di-reset. Blok void loop() bagian berisi program yang dijalankan terus menerus atau berulang.
2. Sintaks Program
Dalam kerangka program baik void setup() dan void loop() harus disertakan tanda kurung kurawal buka “{“ sebagai tanda awal program dan tanda kurung kurawal tutup “}” sebagai tanda akhir program pada blok tersebut. Untuk menandai akhir baris kode program digunakan tanda titik koma ‘;’ [2].
3. Kontrol Aliran Program
Kontrol aliran program meliputi instruksi-instruksi yang digunakan
untuk membuat percabangan dan perulangan. Instruksi percabangan
diantaranya adalah if, if-else, switch case, break, continue, return, dan
4. Operator
Operator aritmatika di arduino meliputi perkalian (*), pembagian (/),
penjumlahan (+), pengurangan (-), dan modulo (%). Modulo adalah
perhitungan untuk mendapatkan sisa hasil pembagian.
2.1.1.2.
Variabel dan Tipe Data
Tabel 2.1. Tipe Data Variabel [2]
Tipe Data Ukuran Data Jangkauan Nilai
Boolean 1 bit True / False
Char 8 bit -128 s.d. 127
Byte 8 bit 0 s.d. 255
Int 16 bit -32768 s.d. 32767
Word 16 bit 0 s.d.65535
Long 32 bit -2147483648 s.d. 2147483647
Float 32 bit -3,4028235 x 1038 s.d. 3,4028235 x 1038
2.1.1.3.
Fungsi
1. Input Output Digital
Ada tiga instruksi yang digunakan dalam input output digital, yaitu
pinMode(), digitalRead(), dan digitalWrite(). 2. Input Output Analog
Secara umum hanya ada dua instruksi yang digunakan , yaitu
analogRead(), dan analogWrite(). Untuk membaca sinyal analog yang masuk, digunakan instruksi analogRead(). Nilai input analog memiliki jangkauan antara 0 hingga 1023.
3. Waktu
Ada empat instruksi yang digunakan dalam fungsi waktu, yaitu
4. Matematika
Ada beberapa instruksi yang digunakan dalam fungsi matematika,
yaitu min(), max(), abs(), constrain(), map(), pow(), sqrt(), dan 3 instruksi dalam fungsi trigonometri, yaitu sin(), cos(), tan(), serta intruksi random(),
byte(), dan bit(). 5. Komunikasi
Fungsi ini digunakan untuk berkomunikasi dengan komputer melalui
port serial. Kaki ATmega328 yang digunakan untuk fungsi ini adalah kaki
2 (RX) dan kaki 3 (TX). Beberapa instruksi yang digunakan adalah
begin(), available(), read(), print(), println(), dan write().
2.1.2.
Mikrokontroler ATmega328
Mikrokontroler adalah suatu alat elektronika digital yang mempunyai
masukan dan keluaran serta kendali dengan program yang bisa ditulis dan dihapus
dengan cara khusus. Mikrokontroler yang digunakan dalam perancangan “Piranti
Penuntun Penyandang Tunanetra dengan Indikasi Jarak Berbasis Arduino” ini adalah
ATmega328 yang sudah terpasang pada board Arduino Uno. Atmega328 memiliki beberapa fitur sebagai berikut :
1. Mempunyai 32 kByte downloadable flash memory.
2. Mempunyai 1 kByte Electrically Erasable Programmable Read-Only Memory (EEPROM) sebagai tempat penyimpanan data sementara meskipun saat mikrokontroler tidak diberi tegangan.
3. Memiliki 2 kByte internal Static Random-AccesMemory (SRAM). 4. Mempunyai 2 Timer/Counter 8 bit dan 1 Timer/Counter 16 bit. 5. Frekuensi kerja sampai dengan 20 MHz.
6. Memiliki serial USART yang dapat diprogram.
Tabel 2.2. Konfigurasi dan Deskripsi Pin ATmega328 [4]
No. Pin Nama Pin Keterangan
7 VCC Sumber tegangan
8, 22 GND Ground
14, 15, 16,
17, 18, 19,
9, 10
Port B
(PB7:0)
Masing-masing pin pada Port B memiliki resistor pull-up
internal dan dapat digunakan sebagai 8 bit input dan output digital. Pin PB6 dan pin PB7 terhubung dengan kristal osilator
16MHz sehingga tidak digunakan sebagai input atau output. Pin PB1 - pin PB3 dapat digunakan sebagai output PWM.
23, 24, 25,
26, 27, 28
Port C
(PC5:0)
Masing-masing pin pada Port C memiliki resistor pull-up internal dan dapat digunakan sebagai 6 bit input dan output
digital.
1 PC6 /
RESET
Pin PC6 digunakan sebagai input reset sehingga tidak
digunakan sebagai input dan output. 2, 3, 4, 5,
6, 11, 12,
13
Port D
(PD7:0)
Masing-masing pin pada Port D memiliki resistor pull-up internal dan dapat digunakan sebagai 8 bit input dan output
digital. Pin PD3 dapat digunakan sebagai output PWM. 20 Avcc Sumber tegangan untuk konversi analog ke digital.
21 AREF Tegangan referensi untuk konversi analog ke digital.
2.1.3.
Rangkaian Reset
Pin reset pada mikrokontroler AVR adalah aktif low. Bila pin reset diberikan pada logika rendah “low” akan mengakibatkan mikrokontroler dalam kondisi reset. Tujuan dari reset pada mikrokontroler antara lain sebagai berikut [6]:
a. Melepas semua jalur, dan mengkondisikan semua pin (kecuali pin XTAL)
dalam keadaan awal (tri-state), menginisialisasi register I/O, dan mengubah nilai counter dalam keadaan 0.
b. Mengkondisikan mikrokontroler dalam mode program.
Gambar 2.4 Diagram operasi untuk Reset eksternal [4]
Pin reset memiliki resistor internal pull-up. Tetapi dalam kondisi lingkungan yang bising atau banyak gangguan, resistor internal tersebut tidak cukup berfungsi
dengan baik, dan reset dapat terjadi secara tidak terduga. Oleh sebab itu resistor
eksternal pull-up dibutuhkan untuk menjaga agar pin reset tidak berlogika 0 secara tidak terduga. Resistor eksternal pull-up secara teori dapat bernilai berapa pun, tetapi jika Atmel AVR diprogram dari STK500/AVRISP maka nilai resistor eksternal pull-upyang direkomendasikan adalah 4.7kΩ atau lebih besar [6].
2.2.
Sensor Jarak Ultrasonic PING)))
Sensor pendeteksi jarak dalam sistem “PIRANTI PENUNTUN PENYANDANG
TUNANETRA DENGAN INDIKASI JARAK BERBASIS ARDUINO” adalah sebuah
2. Arus masukan minimal sebesar 30mA dan maksimal 35mA.
3. Rentang jarak yang dapat dideteksi adalah 2cm sampai dengan 300cm.
4. Input Trigger berupa pulsa TTL positif minimal 2µs.
5. Pulsa Echo berupa pulsa TTL positif dari 115µs sampai 18.5ms
6. Frekuensi burst sebesar 40kHz untuk 200µs.
7. Terdapat LED indikator untuk menunjukkan aktivitas sensor.
8. Memiliki tiga buah pin yang digunakan untuk supply tegangan (5VDC), ground dan signal.
[image:30.595.98.507.65.750.2]Gambar 2.5 Konfigurasi pin sensor ultrasonic PING))) [7]
Prinsip kerja sensor ultrasonic PING))) dalam mendeteksi objek adalah dengan
memancarkan gelombang ultrasonic dan kemudian menangkap sinyal pantulan atau gemanya. Dengan kendali host microcontroller (pemicu pulsa), sensor memancarkan
gelombang ultrasonic sebesar 40kHz. Gelombang tersebut melintas melalui udara dengan kecepatan 1130 feet per second, menabrak sebuah objek dan kemudian memantulkan ke sensor kembali [7].
Sensor ultrasonic PING))) memberikan output pulsa “high” pada pin SIG setelah memancarkan gelombang ultrasonic. Ketika sinyal pantulan atau gema sudah terdeteksi, maka sensor ultrasonic PING))) akan membuat pin SIG menjadi “low”. Lebar pulsa “high” tersebut merupakan lama waktu gelombang ultrasonic yang dihitung sebagai dua kali jarak objek, maka untuk menghitung jarak objek dapat dibuat dengan persamaan berikut :
[image:31.595.94.511.302.603.2]� = � � ℎ . /
Gambar 2.7 Cara kerja sensor ultrasonic PING))) [9]
2.3.
Sound Device ISD2590
Sound device yang digunakan dalam sistem ini adalah sebuah ISD2590. Komponen ISD2590 merupakan single-chip Record/Playback yang mampu merekam atau memutar suara dengan durasi 90 detik. Di dalam sound device tersebut sudah memuat berbagai perangkat tambahan yang dapat membantu dalam operasi perekaman dan pemutar
Gambar 2.8 Block Diagram ISD2560/ISD2590 [8]
ISD2590 memiliki frekuensi sampling 5.3kHz. Setiap suara yang direkam akan langsung disimpan ke dalam on-chip nonvolatile memory tanpa proses digitalisasi dan pengompresan. Chip ISD2590 ini mampu menyimpan pesan suara hingga 100 tahun saat chip tersebut dalam kondisi tidak diberi tegangan (zero-power message storage). Sebagai tambahan, perangkat ini dapat merekam ulang suara hingga lebih dari seratus ribu kali.
2.3.1.
Konfigurasi Pin pada ISD2590
[image:32.595.87.508.349.698.2]2.3.2.
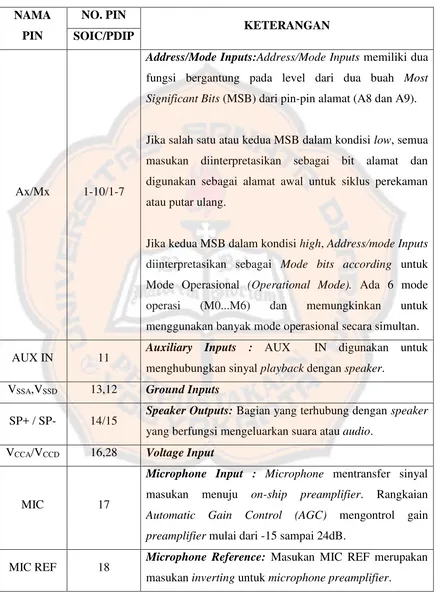
Deskripsi Pin ISD2590
Tabel 2.3 Deskripsi Pin ISD2590
NAMA
PIN
NO. PIN
KETERANGAN SOIC/PDIP
Ax/Mx 1-10/1-7
Address/Mode Inputs:Address/Mode Inputs memiliki dua
fungsi bergantung pada level dari dua buah Most Significant Bits (MSB) dari pin-pin alamat (A8 dan A9).
Jika salah satu atau kedua MSB dalam kondisi low, semua masukan diinterpretasikan sebagai bit alamat dan
digunakan sebagai alamat awal untuk siklus perekaman
atau putar ulang.
Jika kedua MSB dalam kondisi high, Address/mode Inputs diinterpretasikan sebagai Mode bits according untuk Mode Operasional (Operational Mode). Ada 6 mode operasi (M0...M6) dan memungkinkan untuk
menggunakan banyak mode operasional secara simultan.
AUX IN 11 Auxiliary Inputs : AUX IN digunakan untuk menghubungkan sinyal playback dengan speaker.
VSSA,VSSD 13,12 Ground Inputs
SP+ / SP- 14/15 Speaker Outputs: Bagian yang terhubung dengan speaker yang berfungsi mengeluarkan suara atau audio.
VCCA/VCCD 16,28 Voltage Input
MIC 17
Microphone Input : Microphone mentransfer sinyal masukan menuju on-ship preamplifier. Rangkaian
Automatic Gain Control (AGC) mengontrol gain preamplifier mulai dari -15 sampai 24dB.
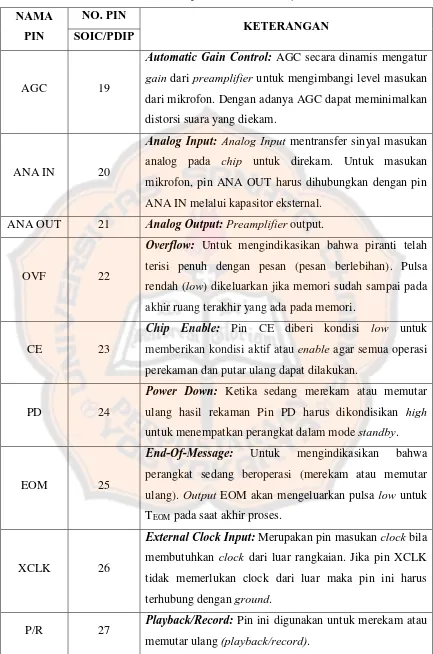
Tabel 2.3 Deskripsi Pin ISD2590 (lanjutan) NAMA PIN NO. PIN KETERANGAN SOIC/PDIP
AGC 19
Automatic Gain Control: AGC secara dinamis mengatur
gain dari preamplifier untuk mengimbangi level masukan dari mikrofon. Dengan adanya AGC dapat meminimalkan
distorsi suara yang diekam.
ANA IN 20
Analog Input: Analog Input mentransfer sinyal masukan
analog pada chip untuk direkam. Untuk masukan mikrofon, pin ANA OUT harus dihubungkan dengan pin
ANA IN melalui kapasitor eksternal.
ANA OUT 21 Analog Output: Preamplifier output.
OVF 22
Overflow: Untuk mengindikasikan bahwa piranti telah
terisi penuh dengan pesan (pesan berlebihan). Pulsa
rendah (low) dikeluarkan jika memori sudah sampai pada akhir ruang terakhir yang ada pada memori.
CE 23
Chip Enable: Pin CE diberi kondisi low untuk memberikan kondisi aktif atau enable agar semua operasi
perekaman dan putar ulang dapat dilakukan.
PD 24
Power Down: Ketika sedang merekam atau memutar
ulang hasil rekaman Pin PD harus dikondisikan high untuk menempatkan perangkat dalam mode standby.
EOM 25
End-Of-Message: Untuk mengindikasikan bahwa
perangkat sedang beroperasi (merekam atau memutar
ulang). Output EOM akan mengeluarkan pulsa low untuk TEOM pada saat akhir proses.
XCLK 26
External Clock Input: Merupakan pin masukan clock bila membutuhkan clock dari luar rangkaian. Jika pin XCLK tidak memerlukan clock dari luar maka pin ini harus
terhubung dengan ground.
17
BAB III
RANCANGAN PENELITIAN
Bab ini menjelaskan mengenai perancangan sistem “Piranti Penuntun Penyandang Tunanetra dengan Indikasi Jarak Berbasis Arduino” terdiri dari Diagram Blok Sistem, Perancangan Perangkat Keras dan Perancangan Perangkat Lunak.
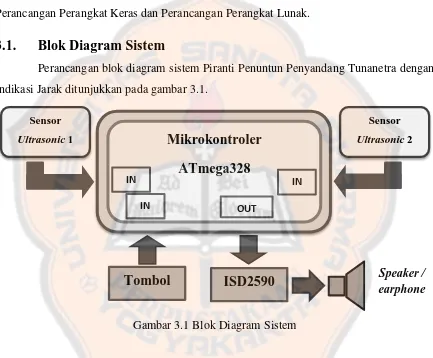
3.1.
Blok Diagram Sistem
Perancangan blok diagram sistem Piranti Penuntun Penyandang Tunanetra dengan
[image:35.595.90.523.209.567.2]Indikasi Jarak ditunjukkan pada gambar 3.1.
Gambar 3.1 Blok Diagram Sistem
Berdasarkan blok diagram sistem di atas dapat dilihat bahwa mikrokontroler
ATmega328 yang terdapat pada board Arduino Uno berfungsi sebagai kontrol utama. Arduino Uno ini terhubung dengan sebuah sensor jarak ultrasonic PING))) sebagai sensor jarak dan sebuah Sound Device ISD2590 sebagai komponen pemutar suara. Jarak yang terdeteksi oleh sensor kemudian diolah mikrokontroler dan dikeluarkan dalam bentuk suara.
Keseluruhan data suara tersebut disimpan dalam ISD2590 dan dikeluarkan dengan diatur
oleh Arduino Uno sesuai dengan jarak yang dideteksi oleh sensor jarak ultrasonic PING))). Sensor
Ultrasonic 1
ISD2590
Speaker /earphone Sensor
Ultrasonic 2
Mikrokontroler
ATmega328
OUT
IN IN
IN
3.2.
Perancangan Perangkat Keras
Perancangan perangkat keras dari Piranti Penuntun Penyandang Tunanetra dengan
Indikasi Jarak ini terdiri atas 3 bagian yaitu Arduino Uno, sensor jarak ultrasonic PING))), dan rangkaian pemutar suara menggunakan ISD2590. Sementara tombol pada perancangan
[image:36.595.102.493.205.606.2]dihubungkan ke digital pin 2 pada board Arduino uno atau pin PD2 pada Atmega328P.
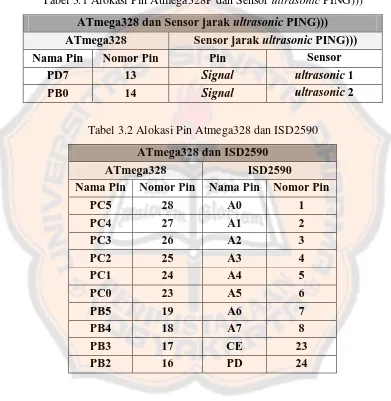
Tabel 3.1 Alokasi Pin Atmega328P dan Sensor ultrasonic PING)))
ATmega328 dan Sensor jarak ultrasonic PING)))
ATmega328 Sensor jarak ultrasonic PING)))
Nama Pin Nomor Pin Pin Sensor
PD7 13 Signal ultrasonic 1
PB0 14 Signal ultrasonic 2
Tabel 3.2 Alokasi Pin Atmega328 dan ISD2590
ATmega328 dan ISD2590
ATmega328 ISD2590
Nama Pin Nomor Pin Nama Pin Nomor Pin
PC5 28 A0 1
PC4 27 A1 2
PC3 26 A2 3
PC2 25 A3 4
PC1 24 A4 5
PC0 23 A5 6
PB5 19 A6 7
PB4 18 A7 8
PB3 17 CE 23
PB2 16 PD 24
3.2.1.
Board Arduino Uno
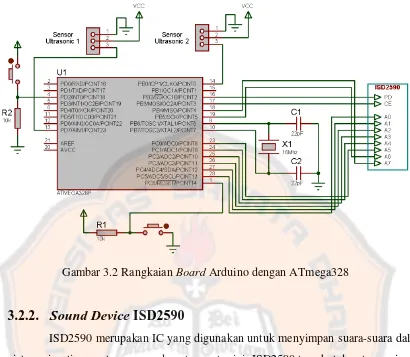
Board Arduino Uno menggunakan sistem minimum dari mikrokontroler ATmega328. Rangkaian osilator pada board Arduino menggunakan kristal 16MHz dan dua buah kapasitor senilai 22pF. Penentuan nilai crystal oscillator sebesar16MHz dan kapasitor 22pF tersebut sesuai dengan datasheet [4].Rangkaian board Arduino dengan
Gambar 3.2 Rangkaian Board Arduino dengan ATmega328
3.2.2.
Sound Device ISD2590
ISD2590 merupakan IC yang digunakan untuk menyimpan suara-suara dalam
sistem piranti penuntun penyandang tunanetra ini. ISD2590 tersebut dapat menyimpan
suara selama 90 detik [8]. Gambar 3.3 merupakan gambar rangkaian dari ISD2590.
Nilai dari komponen kapasitor C1, C2, C3, C4, dan C5 serta komponen resistor R2 dan
R3 pada rangkaian disesuaikan dengan nilai yang terdapat pada typical aplication circuit dalam datasheet [8].
Fungsi dari ISD2590 dalam sistem ini hanya sebagai penyimpan dan pemutar
suara saja. Sedangkan proses pemutaran suara akan diatur oleh mikrokontroler. Dalam
rangkaian ISD2590 ini tidak perlu ditambahkan penguat atau amplifier karena di dalam perangkat ini sudah memuat penguat untuk speaker.
Dalam perancangan sistem piranti penuntun penyandang tunanetra ini IC suara
ISD2590 dioperasikan pada address bit yang berarti setiap kata yang direkam memiliki alamat masing-masing yang berbeda. Penggunaan address bit dilakukan dengan cara
Gambar 3.3 Rangkaian ISD2590
Tabel 3.3 Alamat suara pada ISD2590
Kata Alamat (Address)
A7 A6 A5 A4 A3 A2 A1 A0 HEX
Nol 0 0 0 0 0 1 1 1 7
Satu 0 0 0 0 1 1 1 0 E
Dua 0 0 0 1 0 1 0 1 15
Tiga 0 0 0 1 1 1 0 0 1C
Empat 0 0 1 0 0 0 1 1 23
Lima 0 0 1 0 1 0 1 0 2A
Koma 0 0 1 1 0 0 0 1 31
Meter 0 0 1 1 1 0 0 0 38
Hati-hati 0 0 1 1 1 1 1 1 3F
Jarak 0 1 0 0 1 0 0 0 48
Lebih 0 1 0 0 1 1 1 1 4F
ISD2590 memiliki total waktu perekaman selama 90 detik dan kapasitas 600
alamat [8]. Agar data berupa suara yang sudah direkam tidak bertumpuk dengan suara
yang akan direkam, diperlukan pembagian waktu perekaman yang tepat yaitu durasi
90 detik dibagi dengan 600 alamat sehingga diperoleh 0.15 detik. Dalam perancangan
ini dibutuhkan waktu 1 detik untuk satu kali perekaman suara, maka alamat yang
diperlukan untuk satu kali perekaman adalah 6.66667 alamat sehingga dibulatkan
[image:39.595.92.521.204.571.2]menjadi 7 alamat.
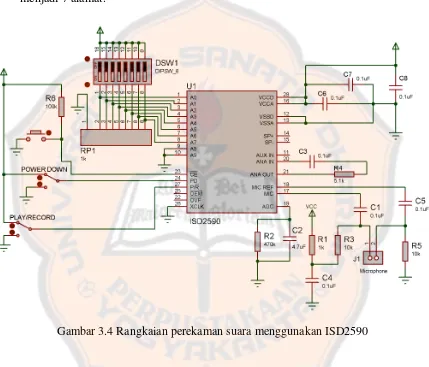
Gambar 3.4 Rangkaian perekaman suara menggunakan ISD2590
Perekaman suara pada ISD2590 dilakukan dengan menggunakan rangkaian seperti
pada Gambar 3.4. Nilai dari komponen kapasitor C1, C2, C3, C4, C5, C6, C7, dan C8 serta
komponen resistor R11, R2, R3, R4, dan R5 pada rangkaian disesuaikan dengan nilai yang
terdapat pada typical aplication circuit dalam datasheet [8]. Diagram alir perekaman suara mengacu pada Gambar 3.8. Proses memasukkan alamat dari A0 sampai dengan A9
3.3.
Perancangan Perangkat Lunak
Perancangan perangkat lunak untuk sistem ini berupa diagram alir yang dapat dilihat
pada gambar 3.6. Suatu diagram alir akan mempermudah dalam pembuatan program dalam
mikrokontroler.
Dalam perancangan sstem Piranti Penuntun Penyandang Tunanetra dengan Indikasi
Jarak ini, program akan dimasukkan ke dalam mikrokontroler Atmega328 yang terdapat di
board Arduino Uno. Program yang dibuat harus sesuai dengan alur diagram agar sistem yang dibuat dapat berjalan sesuai dengan keinginan.
Start Inisilisasi input/
output
Pembacaan Sensor
Ultrasonic 1
Pembacaan Sensor
Ultrasonic 2 Tombol 1
ditekan ? Tidak
Ya
Deteksi jarak benda
[image:40.595.100.493.222.598.2]Deteksi jarak benda
Gambar 3.5 Diagram alir sistem
Proses pertama yang dilakukan adalah menginisialisasi semua input dan output yang ada. Setelah itu sensor ultrasonic PING))) akan mendeteksi keberadaan benda dalam jangkauan deteksi sensor tersebut. Saat tombol 1 pada tongkat tidak ditekan maka sensor
ultrasonic 1 atau sensor yang terpasang pada rompi akan melakukan pendeteksian benda.
Sensor tersebut berfungsi untuk mendeteksi jarak yang ada di depan. Apabila tombol ditekan
Mulai
Delay 2µs
Delay 5µs Atur pin13 sebagai output
Atur pin output
menjadi Low
Atur pin output
menjadi High
Atur pin output
menjadi Low
Tunggu sinyal
echo
Waktu sinyal
echo < 18.5ms
Jarak = waktu tempuh sinyal * 344.424 / 2
Atur pin13 sebagai input
ret Ya
[image:41.595.99.495.66.496.2]Tidak
Gambar 3.6 Diagram alir pembacaan sensor
Langkah awal dari proses pembacaan sensor adalah atur salah satu pin sebagai
output kemudian atur pin tersebut menjadi logika rendah atau low. Memberikan logika low diawal proses bertujuan untuk memastikan tidak ada sinyal echo yang masuk ke dalam mikrokontroler dari proses pembacaan sebelumya. Langkah selanjutnya adalah memberikan
delay dan membuat pin output berlogika high selama 5μs. Pulsa high tersebut merupakan pulsa pemicu yang digunakan sensor untuk memancarkan gelombang ultrasonic. Setelah pin output diberikan logika high selama 5μs langkah berikutnya adalah mengatur pin output menjadi logika low untuk membaca sinyal echo.
maka pin SIGNAL akan belogika low. Lebar sinyal high dari pin SIGNAL tersebut merupakan lama waktu gelombang ultrasonic yang akan dikonversi menjadi jarak.
Apakah sensor mendeteksi jarak >3.1m Ya Tidak Mulai Apakah sensor mendeteksi jarak
2.9m - 3.1m
Ya Tidak
Apakah sensor mendeteksi jarak
2.6m – 2.4m
Ya Tidak
Apakah sensor mendeteksi jarak
1.9m - 2.1m
Ya Playback suara Playback suara Playback suara Playback suara Apakah sensor mendeteksi jarak >
1.6m – 1.4m Ya Tidak Apakah sensor mendeteksi jarak
0.9m - 1.1m
Ya Tidak
Apakah sensor mendeteksi jarak
0.6m – 0.4m
[image:42.595.85.521.128.568.2]Ya Tidak Apakah sensor mendeteksi jarak <0.4m Ya Playback suara Playback suara Playback suara Playback suara ret
Gambar 3.7 Diagram alir deteksi benda
Keluaran dari Piranti Penuntun Penyandang Tunanetra berupa suara. Output suara tersebut berupa jarak yang dideteksi oleh sensor dengan jarak deteksi maksimal 3 meter dan
minimal 0.5 meter dengan interval jarak 0.5 meter. Agar sistem dapat berjalan dengan baik
dan suara dapat dikeluarkan dengan baik pula maka jarak pendeteksian benda diganti dengan
range. Bila sensor mendeteksi benda dengan jarak antara 3.1 meter sampai 2.9 meter maka
alat ini akan mengeluarkan suara 3 meter. Ketika sensor mendeteksi benda dengan jarak
antara 2.6 meter sampai 2.4 meter maka alat ini akan mengeluarkan suara 2.5 meter.
Demikian seterusnya bila sensor mendeteksi jarak antara 0.6 meter sampai 0.4 meter maka
dari 0.4 meter maka suara yang akan diputar adalah “hati-hati”. Proses playback suara ditampilkan pada Gambar 3.9.
3.4.
Proses Record dan Playback
Proses record atau perekaman bertujuan untuk menyimpan sinyal audio atau suara ke dalam memori ISD2590. Penyimpanan suara dilakukan dengan mengubah sinyal analog
menjadi data-data digital. Data yang telah disimpan tersebut akan diputar ulang sesuai
dengan perintah mikrokontroler. Proses playback dan record ditunjukkan pada gambar 3.7. Langkah-langkah perekaman suara ke dalam IC ISD2590 adalah sebagai berikut :
1. Menentukan alamat dari ISD2590 yang akan diisi suara terlebih dahulu.
Alamat-alamat yang akan direkam dalam perancangan ini mengacu pada Tabel 3.3.
2. Proses pengisian suara dilakukan dengan memberikan logika rendah atau low pada pin Chip Enable Input (CE) dan pada pin Playback/Record Input (P/R) secara bersama-sama.
3. Berikan input berupa suara melalui mikrofon pada sistem ISD2590.
4. Setelah selesai merekam berikan logika tinggi atau high pada pin Power Down Input (PD).
Mulai Atur pin P/R
“low”
Atur pin PD
“low”
Atur pin CE
“low”
Atur alamat
pada ISD Masukan suara Atur pin PD
“high”
Atur pin CE
“high”
Selesai
Proses playback atau pemutaran ulang suara dilakukan dengan menentukan alamat suara pada ISD2590 yang akan diputar, dalam perancangan ini mengacu pada Tabel 3.3.
Kemudian berikan logika rendah atau low pada pin Chip Enable Input (CE) dan logika tinggi atau high pada pin Playback/Record Input (P/R). Setelah proses playback selesai, maka
secara otomatis suara akan berhenti.
Mulai Atur pin P/R
“high”
Atur pin PD
“low”
Atur pin CE
“low”
Atur alamat pada ISD
Dengarkan suara hasil rekaman
Atur pin PD
“high”
Atur pin CE
“high”
[image:44.595.96.498.190.604.2]Selesai
27
BAB IV
HASIL DAN PEMBAHASAN
Bab ini menjelaskan implementasi perancangan penelitian dan hasil pengamatan
beserta pembahasannya untuk mengetahui kesesuaian antara perancangan dan penelitian.
4.1
Implementasi Alat
Ada beberapa perubahan antara perancangan dan implementasi perangkat keras.
[image:45.595.85.518.261.606.2]Pada rangkaian ini tidak digunakan Board Arduino tetapi hanya menggunakan IC ATmega328 saja yang terdapat pada Board Arduino. Hal tersebut dilakukan karena IC ATmega328 pada Board Arduino sudah terisi bootloader sehingga dapat langsung dipindahkan ke rangkaian dengan menambah crystal 16MHz, kapasitor 22pF dan resistor 10kΩ seperti yang ditampilkan pada Gambar 4.1.
Gambar 4.1 Rangkaian Bootloader [17]
Piranti Penuntun Penyandang Tunanetra dengan Indikasi Jarak Berbasis Arduino
mempunyai dua buah buah komponen utama, yaitu sebuah rompi dan sebuah tongkat. Dalam
Gambar 4.2 Rompi dan Tongkat Penuntun Bagian Luar
Tabel 4.1 Keterangan Gambar Rompi dan Tongkat Penuntun Bagian Luar
No. Nama Komponen Keterangan
1 Speaker Komponen yang mengeluarkan suara
2 Sensor ultrasonic 1 Sebagai pendeteksi jarak
3 Sensor ultrasonic 2 Sebagai pendeteksi jarak
4 Tombol Mengganti pembacaan sensor
5 Kabel Menghubungkan rongkat dengan rompi
Pembacaan sensor pada alat ini dilakukan secara bergantian dengan cara menekan
tombol pada bagian tongkat. Bila tombol ditekan maka pendeteksian jarak akan dilakukan
1
2
3
4
oleh sensor yang terpasang pada tongkat. Namun bila tombol pada tongkat tidak ditekan
[image:47.595.98.494.140.555.2]maka pendeteksian jarak akan dilakukan oleh sensor yang terpasang pada rompi.
Gambar 4.3 Rompi Penuntun Bagian Dalam
Tabel 4.2 Keterangan Gambar Rompi dan Tongkat Penuntun Bagian Dalam
Nomor Keterangan
1 Saku penyimpanan baterai
2 Baterai yang digunakan (lipo 7,2 volt )
3 Saku penyimpanan rangkaian mikrokontroler dan ISD2590
4 Rangkaian mikrokontroler dan ISD2590
5 Sensor ultrasonic
2
4
5
1
Perangkat keras dari piranti penuntun penyandang tunanetra ditampilkan pada
Gambar 4.3. Dalam rangkaian tersebut terdapat sebuah minimal sistem dari arduino uno dan
ISD2590 yang berfungsi sebagai perekam, penyimpan, dan pemutar suara. Alat ini dapat
berfungsi pada tegangan 5 Volt DC. Tegangan yang dihasilkan berasal dari sebuah baterai
Lithium Polymer (Lipo) yang dapat diisi ulang, sehingga alat ini cukup fleksibel untuk dibawa.
[image:48.595.92.527.192.595.2]Gambar 4.4 Rangkaian ISD2590 dan ATmega328
Tabel 4.3 Keterangan Gambar Rangkaian ISD2590 dan ATmega328
No. Nama Kompenen Keterangan
1 ISD2590 Untuk menyimpan suara
2 Mikrokontroler ATmega 326 Kontrol utama dari sistem
3 Tombol reset Untuk mereset mikrokontroler
4 Socket 2 pin Untuk menghubungkan tombol dengan pin
pada mikrokontroler
1
2
3
5
6
7
11
10
9
8
Tabel 4.3 (Lanjutan) Keterangan Gambar Rangkaian ISD2590 dan ATmega328
No. Nama Kompenen Keterangan
5 Kapasitor 22pF Salah satu komponen dalam rangkaian osilator
sistem mikrokontroler ATmega328
6 Kristal 16MHz Salah satu komponen dalam rangkaian osilator
sistem mikrokontroler ATmega328
7 Kapasitor 22pF Salah satu komponen dalam rangkaian osilator
sistem mikrokontroler ATmega328
8 TBlock 2 pin Untuk input tegangan dari baterai
9 Socket 3 pin Untuk menghubungkan sensor ultrasonic yang dipasang pada rompi dengan pin pada
mikrokontroler
10 Socket 3 pin Untuk menghubungkan sensor ultrasonic yang dipasang pada tongkat dengan pin pada
mikrokontroler
11 Socket 2 pin Untuk menghubungkan speaker dengan pin pada ISD2590
Dalam perangkat keras ini ATmega328 ditambahkan rangkaian osilator dengan
menggunakan kristal 16MHz dan dua buah kapasitor senilai 22pF. Rangkaian ISD2590
menggunakan komponen kapasitor dan resistor yang nilainya disesuaikan dengan nilai
yang terdapat pada typical aplication circuit dalam datasheet.
4.2
Pengujian Alat
Pengujian alat berguna untuk mendapatkan data-data spesifikasi atau mendapatkan
titik pengukuran dari alat yang telah dibuat sehingga akan mempermudah menganalisa
kesalahan dan kerusakan yang akan terjadi pada saat alat ini bekerja.
4.2.1
Pengujian Hasil Perekaman Suara
Pengujian ini dilakukan untuk mengetahui apakah kata-kata yang direkam dalam
ISD2590 sudah sesuai dengan perancangan. Data alamat suara yang direkam dalam
[image:49.595.100.529.81.462.2]Tabel 4.4 Alamat Suara yang Disimpan Dalam ISD2590
Kata Alamat (Address)
A7 A6 A5 A4 A3 A2 A1 A0 HEX
Nol 0 0 0 0 0 1 1 1 7
Satu 0 0 0 0 1 1 1 0 E
Dua 0 0 0 1 0 1 0 1 15
Tiga 0 0 0 1 1 1 0 0 1C
Empat 0 0 1 0 0 0 1 1 23
Lima 0 0 1 0 1 0 1 0 2A
Koma 0 0 1 1 0 0 0 1 31
Meter 0 0 1 1 1 0 0 0 38
Hati-hati 0 0 1 1 1 1 1 1 3F
Jarak 0 1 0 0 1 0 0 0 48
Lebih 0 1 0 0 1 1 1 1 4F
Dari 0 1 0 1 0 0 0 0 50
Data pada tabel 4.4 merupakan alamat kata-kata yang disimpan dalam ISD2590.
Dari data tersebut alamat yang disimpan dalam ISD2590 sudah sesuai dengan apa yang
sudah dirancang pada bab sebelumnya.
4.2.2
Pengujian Ketepatan Suara dengan Jarak
Pengujian ini dilakukan untuk mengetahui ketepatan suara yang diputar dengan
jarak yang dideteksi oleh sensor. Berikut ini merupakan tabel keluaran suara dengan
jarak yang dideteksi sensor yang dipasang pada rompi.
Tabel 4.5 Suara yang Dihasilkan Ketika Sensor pada Rompi Mendeteksi Benda
Range Jarak
(meter) Output Suara Gambar Sinyal Keluaran Suara
Tabel 4.5 (Lanjutan) Suara yang Dihasilkan Ketika Sensor pada Rompi Mendeteksi Benda
Range Jarak
(meter) Output Suara Gambar Sinyal Keluaran Suara
0,4 – 0,6 Nol koma lima meter
0,9 – 1,1 Satu meter
1,4 – 1,6 Satu koma lima meter
1,9 – 2,1 Dua meter
2,4 – 2,6 Datu koma lima meter
2,9 – 3,1 Tiga meter
> 3,1 Jarak lebih dari tiga meter
Pengujian ketepatan suara dengan jarak tidak hanya dilakukan pada sensor yang
dipasang pada rompi saja. Pengujian tersebut juga dilakukan pada sensor yang dipasang
pada tongkat untuk mengetahui kesesuian jarak yang dideteksi sensor dengan suara yang
dihasilkan. Berikut ini merupakan tabel keluaran suara dengan jarak yang dideteksi
[image:51.595.86.527.118.604.2]Tabel 4.6 Suara yang Dihasilkan Ketika Sensor pada Tongkat Mendeteksi Benda
Range Jarak
(meter) Output Suara Gambar Sinyal Keluaran Suara
< 0,4 Hati-hati
0,4 – 0,6 Nol koma lima meter
0,9 – 1,1 Satu meter
1,4 – 1,6 Satu koma lima meter
1,9 – 2,1 Dua meter
2,4 – 2,6 Datu koma lima meter
2,9 – 3,1 Tiga meter
> 3,1 Jarak lebih dari tiga meter
Dari data pengujian ketepatan suara yang ditunjukkan pada tabel 4.5 dan tabel
4.6, suara yang dihasilkan dari piranti ini sudah sesuai dengan jarak yang dideteksi oleh
sensor baik yang dipasang pada rompi maupun yang dipasang pada tongkat. Piranti
[image:52.595.84.528.106.656.2]dengan jarak yang dideteksi oleh sensor. Setiap kata yang direkam memiliki pola sinyal
keluaran suara yang berbeda-beda antara kata yang satu dengan kata yang lain. Kata
“nol” akan berbeda bentuk sinyalnya dari kata “satu” dan kata-kata lain yang disimpan dalam ISD2590. Gambar 4.5 menunjukkan pola sinyal dari kata “nol”. Pola sinyal dari
kata “nol” tersebut berbeda dari pola kata “satu” seperti yang ditunjukkan pada gambar
4.6.
Gambar 4.5 Pola Sinyal Dari Kata Nol Gambar 4.6 Pola Sinyal Dari Kata Satu
Gambar 4.7 Pola Sinyal Dari Kata Dua Gambar 4.8 Pola Sinyal Dari Kata Tiga
[image:53.595.101.514.187.710.2]
Gambar 4.11 Pola Sinyal Dari Kata Meter Gambar 4.12 Pola Sinyal Dari Kata jarak
Gambar 4.13 Pola Sinyal Dari Kata Lebih Gambar 4.14 Pola Sinyal Dari Kata Dari
Gambar 4.15 Pola Sinyal Dari Kata Hati-hati
Bentuk dan pola sinyal dari kata “hati-hati” seperti yang ditampilkan pada gambar 4.15 lebih panjang dari pola sinyal kata-kata lain. Hal tersebut terjadi karena
kata “hati-hati” terdiri dari dua buah kata sedangkan kata lain yang disimpan dalam ISD2590 hanya terdiri dari satu buah kata. Diperlukan waktu yang lebih lama untuk
mengeluarkan suara “hati-hati” sehingga polanya menjadi lebih panjang dari pola kata-kata lainnya.
Dalam pengujian jarak oleh sensor terdapat perbedaan jarak antara sensor yang
meteran. Pada tabel 4.7 ditunjukan perbedaan jarak yang dideteksi oleh sensor yang
[image:55.595.99.515.153.552.2]dipasang pada rompi dengan sensor yang dipasang pada tongkat.
Tabel 4.7 Jarak yang diukur oleh sensor pada rompi dan sensor pada tongkat
Jarak yang
diukur
(meter)
Jarak yang terukur sensor Error jarak yang diukur dengan
jarak yang terukur sensor pada rompi
(meter)
pada tongkat
(meter) pada rompi (%)
pada tongkat
(%)
0,4 0,396 0,399 1,00 0,25
0,6 0,603 0,61 0,50 1,67
0,9 0,898 0,89 0,22 1,11
1,1 1,11 1,105 0,91 0,45
1,4 1,404 1,406 0,29 0,43
1,6 1,616 1,602 1,00 0,13
1,9 1,908 1,904 0,42 0,21
2,1 2,11 2,11 0,48 0,48
2,4 2,406 2,402 0,25 0,08
2,6 2,618 2,616 0,69 0,62
2,9 2,914 2,905 0,48 0,17
3,1 3,121 3,108 0,68 0,26
Rata-rata 0,58 0,49
Tabel 4.6 menunjukan bahwa rata-rata error antara jarak yang diukur dengan jarak yang dideteksi sensor pada rompi adalah 0,58%. Selisih juga terjadi pada jarak
yang diukur dengan jarak yang dideteksi sensor pada tongkat. Rata-rata error yang didapat adalah 0,49%. Selisih pengukuran jarak ini disebabkan karena masalah
pengukuran yang kurang akurat dan waktu pembacaan sensor.
4.2.3
Pengujian Respons Time
Pengujian ini dilakukan untuk menentukan langkah dari pengguna piranti ini.
beda sampai dengan piranti ini selesai mengeluarkan suara. Pada tabel 4.8 ditunjukkan
respons time dari piranti penuntun penyandang tunanetra ini.
Tabel 4.8 Respons Time Piranti Penuntun Penyandang Tunanetra
No. Suara yang dikeluarkan Waktu (detik)
1 Jarak lebih dari tiga meter 4,15
2 Tiga meter 1,85
3 Dua koma lima meter 3,4
4 Dua meter 1,78
5 Satu koma lima meter 3,38
6 Satu meter 2,15
7 Nol koma lima meter 3,82
8 Hati-hati 2,64
Tabel 4.8 menunjukkan waktu yang dibutuhkan piranti ini saat sensor mulai
mendeteksi benda sampai dengan piranti ini selesai mengeluarkan suara. Setiap suara
yang dikeluarkan memiliki waktu yang berbeda antara suara yang satu dengan suara
yang lain. Hal tersebut terjadi karena setiap suara yang dikeluarkan memiliki jumlah
kata yang berbeda.
Ketika pengguna alat ini atau user berjalan dengan normal dalam suatu ruangan dan suara yang keluar dari speakeradalah “jarak lebih dari tiga meter” maka user dapat
berjalan dengan aman. Waktu yang dibutuhkan untuk mengeluarkan suara “jarak lebih dari tiga meter” adalah 4,15 detik. Selama waktu tersebut user dapat melangkah sebanyak lima langkah dan jarak yang terdetaksi oleh sensor adalah satu meter sehingga
suara yang dikeluarkan oleh speaker adalah ”satu meter”. Hal tersebut berarti jarak antara 3 meter sampai dengan jarak 1,5 meter tidak diputar suaranya karena waktu
pemutaran suara “jarak lebih dari tiga meter” yang lebih lama dari pemutaran suara yang lain yang direkam dalam ISD2590.
Supaya jarak antara 3 meter sampai dengan jarak 1,5 meter dapat diputar
suaranya, pengguna alat ini harus berjalan sedikit lebih lambat dan mengambil langkah
kaki yang tidak terlampau jauh. Saat suara yang keluar dari speakeradalah “jarak lebih
[image:56.595.97.509.157.532.2]berhenti sejenak sampai suara yang dikeluarkan speaker selesai. Ketika suara yang dikeluarkan speaker selesai dan setelah ditunggu beberapa saat namun tidak ada suara
lagi yang dikeluarkan sebaiknya user mengambil langkah maju atau mundur sedikit supaya sensor dapat mendeteksi jarak yang telah ditentukan dalam program.
Apabila suara yang dikeluarkan berupa jarak user disarankan untuk berjalan satu langkah saja dan berhenti sejenak dan menunggu sampai suara yang dikeluarkan selesai.
Setelah suara yang dikeluarkan sudah selesai user dapat berjalan kembali satu langkah pendek. Saat suara yang dikeluarkan oleh speaker adalah “nol koma lima meter” user sebaiknya berhenti dan berbelok karena objek yang dideteksi oleh sensor sudah dekat.
4.2.4
Pengujian Tombol
Pengujian ini dilakukan untuk mengetahui apakah tombol sudah berfungsi
dengan baik. Dalam sistem ini rangkaian tombol menggunakan resistor pull down, artinya bila tombol ditekan maka tegangan keluran akan berlogika high atau mendekati VCC. Dalam sistem ini tegangan sumber yang digunakan adalah tegangan DC 5 Volt.
Namun bila tombol tidak ditekan maka tegangan keluarannya akan berogika low.
[image:57.595.104.524.296.682.2]Rangkaian resistor pull down ditunjukkan pada gambar 4.16.
Tabel 4.9 Implementasi Tegangan Keluaran Sesuai Dengan Kondisi Tombol
Kondisi Tombol Tegangan Keluaran
Ditekan 4,93 Volt
Tidak Ditekan 0,00 Volt
Data yang diperoleh pada tabel 4.9 merupakan hasil implementasi saat tombol
ditekan dan tombol tidak ditekan. Pengujian tombol tersebut menunjukkan bahwa saat
tombol ditekan tegangan keluaran adalah 4.93 Volt. Hasil yang didapat ini sudah sesuai
dengan teori bahwa tegangan keluarannya mendekati VCC atau tegangan masukan
sistem.
4.3
Perangkat Lunak
Perangkat lunak atau program pada mikrokontroler dibuat untuk menujang kinerja
dari sistem piranti penuntun penyandang tunanetra itu sendiri. Dalam sistem ini terdapat
sebuah program utama dan sembilan buah subprogram. Program utama berisi inisalisasi
input dan output, pembacaan jarak oleh sensor, dan pemilihan sensor oleh tombol. Sedangkan masing-masing subprogram berisi perintah untuk mengeluarkan suara dari
ISD2590.
Inisialisasi input output dilakukan dengan tujuan agar semua input dan output dapat dibaca oleh mikrokontroler. Setiap pin yan digunakan dalam sistem diatur apakah pin
tersebut digunakan sebagai input atau sebagai output dengan perintah pinMode(). Program inisialisasi input dan output ditunjukkan pada gambar 4.17.
Program pemilihan sensor oleh tombol berfungsi unuk memilih sensor mana yang
jaraknya akan dikeluarkan oleh speaker. Jika tombol tidak ditekan maka speaker akan
mengeluarkan suara berupa jarak yang didetaksi oleh sensor yang dipasang pada rompi.
Tetapi bila tombol ditekan maka suara yang dikeluarkan speaker adalah jarak yang dideteksi
oleh sensor yang dipasang pada tongkat. Program pemilihan sensor ditunjukkan pada
[image:59.595.84.524.196.724.2]gambar 4.18.
Gambar 4.18 Program Pemilihan Sensor
Jarak yang dideteksi oleh sensor tidak semua dapat dikeluarkan suaranya. Suara yang
dapat dikeluarkan alat ini adalah berupa jarak 0.5 meter sampai 3 meter dengan interval 0.5
meter.
Setiap jarak yang akan dikeluarkan suaranya diberi range jarak 10cm ke atas dan ke
bawah dengan tujuan untk mempermudah proses pendeteksian benda. Sebagai contoh bila
suara yang akan dikeluarkan adalah 3 meter maka di dalam program dibuat jarak minimal
deteksi adalah 2.9 meter dan jarak maksimal deteksi sebesar 3.1 meter. Kemudian untuk
mengeluarkan suara 3 meter program akan melompat ke sub program “tiga_m( )”. Program pedeteksian benda ditunjukkan pada gambar 4.19.
Proses awal program pembacaan sensor adalah dengan membuat pin mikrokontroler
yang terhubung dengan pin Signal pada sensor menjadi pin output. Kemudian berikan sinyal High selama 5 microseconds untuk memicu sensor agar sensor mengeluarka
![Gambar 2.6 Diagram waktu sensor ultrasonic PING))) [7]](https://thumb-ap.123doks.com/thumbv2/123dok/854337.609085/30.595.98.507.65.750/gambar-diagram-waktu-sensor-ultrasonic-ping.webp)
![Gambar 2.7 Cara kerja sensor ultrasonic PING))) [9]](https://thumb-ap.123doks.com/thumbv2/123dok/854337.609085/31.595.94.511.302.603/gambar-cara-kerja-sensor-ultrasonic-ping.webp)
![Gambar 2.9 Konfigurasi pin ISD2560/ISD2590 [8]](https://thumb-ap.123doks.com/thumbv2/123dok/854337.609085/32.595.94.524.76.313/gambar-konfigurasi-pin-isd-isd.webp)